A Distributed Self-Consistent Control Method for Electric Vehicles to Coordinate Low-Carbon Transportation and Energy
2023-03-09BowenZhouChaoXiDongshengYangSeniorQiuyeSunSeniorandHuaguangZhang
Bowen Zhou,,Chao Xi,Dongsheng Yang, Senior,Qiuye Sun, Senior,and Huaguang Zhang,
Dear Editor,
In this letter,a distributed self-consistent control method to coordinate low-carbon transportation and energy is proposed to address the efficient utilization of regional transportation energy and renewable energy.Specifically,taking into account the coordinated development of transportation,power grids,and renewable energy,transportation energy self-consistent,including instant self-consistent rate and power self-consistent rate,is introduced to the distributed control,which considers electric vehicle (EV) charging and discharging willingness,and integrates the multiple demands of transportation,power grids,and renewable energy.The simulation results show that the proposed method can effectively increase the instant self-consistent rate and improve the renewable energy accommodation.
Transportation energy refers to the energy production,consumption,and management of all energy generators,end-users,and infrastructure in the transportation sector.It may include road,railway,marine,aviation,and other types.The new road transportation energy system,integrating the renewable energy and transportation alongside the roads,can efficiently benefit the natures of the transportation system and achieve the coordinated development.On the transportation side,the formation of the new road transportation energy system will change the share of transportation energy supply and promote the renewable energy accommodation in the transportation sector [1].On the grid side,it can relieve the pressure on the regional power grids.And on the environmental side,it reduces the carbon emissions of energy consumption in the transportation system[2].
There have been many methods to consume renewable energy and to optimal schedule EV charging and discharging.These methods collect users’ willingness to charge and discharge and incentivize them to accommodate renewable energy.However,such methods only consider the highest economic benefits of EVs and may ignore the utilization of renewable energy and carbon emissions.Different EVs charging and discharging amount,different renewable energy generation,and different grid electricity consumption at different time intervals will result in different power grid operation and carbon emission effects.
Related work:in recent years,many researches have been focusing on such problem.Huet al.[3] proposed a robust multi-timescale energy management strategy to manage the energy distribution of photovoltaic (PV) and EVs,which suppressed the overcharge and over discharge problems of EVs to some extent.However,they were all centrally controlled and the control strategy could not be realized by each EV.Linet al.[4] developed a mixed-integer linear programming model for end-users to reduce energy waste.The model included renewable energy,energy storage,EVs,and an internet-of energy-based energy trading platform.However,the model did not maximize the grid benefits.Hiroshiet al.[5] proposed a management framework for charging and discharging EVs by coordinating the efficient utilization of PV generation output to reduce residential operating costs.This management framework could maximize the benefits of the grid and EV owners.However,when EV charging and discharging control was performed based on a schedule determined by a prediction curve that deviated significantly from the actual value,the consumption of renewable energy sources would be reduced.Wanget al.[6] studied a method to mitigate large wind power fluctuations using a vehicle-to-grid system and proposed an optimal dispatching strategy for EVs and wind power using a dynamic planning approach,which could effectively suppress wind power fluctuations.However,it could not achieve the benefits of EV owners and energy utilization maximization.Lai and Lu [7] proposed a robust two-level distributed control scheme for large-scale distributed energy sources participating in microgrid power output regulation.The self-consistent proportional power sharing could be achieved in the microgrid.However,it did not consider the impact of transportation on the self-consistent of renewable energy sources.This letter aims to make such an important improvement.
Problem statement:With the rapid grow th of transportation demand,the total energy consumption of transportation and its share of the total society are showing an increasing trend year by year,and the grow th rate is also rising rapidly.Meanwhile,solar and wind energy continue to dominate the expansion of renewable energy capacity,accounting for a large amount of the net increase in capacity.
Therefore,the study of new forms,new modes,and key technologies for the integration of solar and wind energy and transportation can,on the one hand,promote the healthy and orderly development of the renewable energy industry,and on the other hand,be beneficial to improving the energy efficiency of transportation,optimizing the energy structure of transportation,and promoting the transformation of transportation.
EVs have been widely used in modern society,which are regarded as an important path for low-carbon transportation transition.This letter develops the EV charging and discharging willingness according to parameters including departure venue,destination venue,departure time and desired battery state-of-charge (SoC),initial battery SoC,and introduces the charging and discharging willingness into the optimal EV charging and discharging power.Next,transportation energy self-consistent is proposed,which can indicate the coupling between transportation and energy,and is an important indicator for assessing transportation participation in power grid energy coordination and renewable energy accommodation.Finally,taking the self-consistent rates as the consistent variables,a distributed control method is proposed to realize optimal charging and discharging of EVs.
EV charging and discharging willingness:EV charging and discharging willingness indicates the urgency of EVs’ charging and discharging needs based on factors such as EVs’ SoC before departure,the amount of power used to reach the destination,and the amount of SoC available during the parking period [8].The willingness is calculated as (1).
where ωG2V,i(t) and ωV2G,i(t) are the charging and discharging willingness of thei-th EV at timet,respectively.S OCi(t) is the percentage of power remaining in thei-th EV at timet.S OCplan,iis the percentage of electricity consumption planned for thei-th EV travel.Piand ηiare the power and efficiency of thei-th EV charging and discharging at timet.Ciis thei-th EV battery capacity.t1andt2are the charging start time and end time.
In order to accommodate renewable energy and to realize peak shaving,the total power output of all EVs is perfectly matched to the fluctuating renewable power generation.xi(t) is thei-th EV charging and discharging power at timet.
wherePwt-pv(t) is the fluctuations of wind and solar power at timet.ωi(t) is thei-th EV charging and discharging willingness at timet.Nis the EV number.
Transportation energy self-consistent:Roads in a region are powered by renewable energy infrastructure in their vicinity,integrating the multiple demands of transportation and power grids,making efficient utilization of renewable energy through adjacent transportation and other loads,and collaborating with power grids for peak shaving and frequency regulation to realize the co-development of low-carbon transportation and energy.The transportation energy self-consistent can be described by two indices: instant self-consistent rate and power self-consistent rate.
Instant self-consistent rate:Instant self-consistent rate refers to the ratio of renewable energy local accommodation (including EV charging) to renewable energy output (including EV discharging) at a certain time.When renewable energy and EV discharging is greater than electricity consumption,it is calculated as the ratio of renewable energy power used by EVs and other facilities to renewable energy;when renewable energy and EV discharging is less than electricity consumption,it is calculated as the ratio of the sum of renewable energy and EV discharging to total electricity consumption at that time.The instant self-consistent rateSrate,In(t) at timetis calculated as (3).
wherexi(t) is the charging and discharging power of thei-th EV at timet.Qother(t) is the electricity consumption of equipment excluding EVs at timet.Pfact,wt(t) andPfact,pv(t) are the output of wind turbines and PV at timet.Qgeneration(t) andQconsumption(t) are the total generation of wind and solar and total electricity consumption at timet.
Power self-consistent rate:Power self-consistent rate refers to the ratio of renewable energy local accommodation (including EV charging) to renewable energy output (including EV discharging) in the certain region during a day.When the renewable energy and EV discharging is greater than the electricity consumption,it is calculated as the ratio of renewable energy power used by EVs and other facilities to the renewable energy;when the renewable energy and EV discharging is less than the electricity consumption,it is calculated as the ratio of the sum of renewable energy and EV discharging to the total electricity consumption in a day.The power self-consistent rateSrate,Pis calculated as (4).
whereTis the number of total time intervals during a day.It can be known form the definition that the power self-consistent rate will remain the same in a day,if the power output and demand is fixed and there is no additional load consumption.Thus,the instant self consistent rate is introduced in the EV distributed charging and discharging.
EV distributed charging and discharging:The distributed consistency algorithm can find the global optimal solution based on the relevant information of neighboring agents,and the iterative update of agentiis
whereyj[k] is value ofk−1 iterations of thej-th EV parameters.yi[k+1] is the value ofkiterations of thei-th EV parameters.di jis Laplace coefficient matrix.Mis the number of agents.
The Laplace coefficient matrix is
whereni,njare the number of agents connected to agentiand agentj.Niis the collection of all agents connected to the agenti.∆ is a very small number.It should be noticed that the agent can be a single EV or a group of EVs.
Solving the EV charging and discharging willingness and instant self-consistent rate in a fully distributed manner,the EV willingness and instant self-consistent rate can be updated iteratively as
Objective function: Maximize the instant self-consistent rate,which means to make it close to 1,as shown in (8).
The constraints are electrical balance constraint,EV battery capacity constraint,and EV charging and discharging power constraints.The proof of the solution and convergence of the model can be referred as [9].The consistency variables are the instant self-consistent rates,and the convergence of the consistency is the solution of the objective function.
Experiments:In order to perform distributed control of EV charging and discharging during a day,the EVs are divided into four groups of 25 EVs each,and the capacity of each EV is 18 kWh.The initial SoC and self-consistent rate consistency iteration parametersof each group of EVs at 6 a.m.are shown in Tables 1 and 2.It is supposed that all EVs could reach the desired SoC at 6 a.m.

Table 1.Initial Power Parameters of EVs

Table 2.Consistent Iteration Parameters
The consistency convergence results are shown in Figs.1 and 2.It can be found that,after 15 iterations,all groups of EV output converge,and all groups of EV instant self-consistent rate converge to a common value,thus achieving the optimization objective.It should be noticed that all convergence curve initially increase since the self consistent rate is supposed to be improved from initial values,which are set as small numbers.

Fig.1.Self-consistent rate curve.

Fig.2.EV charging and discharging power curve.
The 24 h electricity profile and instant self-consistent rate are shown in Fig.3.The instant self-consistent rate increased to an average of 84.3%,with a minimum of 83.7% and a maximum of 85.0%,while the power self-consistent rate remained the same at 84.4%.In this study,the renewable energy utilization rate can reach 91.0%.The optimization improves the instant self-consistent rate,resulting in a higher utilization of renewable energy.However,the power self-consistency rate does not change due to the same power generation and consumption during the day.
Conclusions:Considering the transportation energy self-consistent,a distributed self-consistent control method to coordinate lowcarbon transportation and energy is proposed for EVs with different charging and discharging willingness to improve renewable energy accommodation and to reduce transportation carbon emissions.The simulation results show that the proposed method can effectively realize distributed control of EV charging and discharging according to power generation and consumption.The maximuminstant self consistent rate can be 85%,and the power self-consistent rate remains the same as 84.4%.The renewable energy utilization rate can reach 91% in a day.The future work will include large-scale distributed control algorithms considering each EV as a distributed control individual,and the introduction of power self-consistent rate into the optimization function.
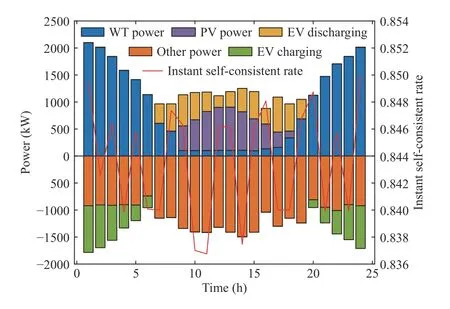
Fig.3.One-day electricity profile and instant self-consistent rate.
Acknowledgments:This work was supported by the National Natural Science Foundation of China (U1908217,61703081)
杂志排行

IEEE/CAA Journal of Automatica Sinica的其它文章
- A Survey on Negative Transfer
- Three-Way Behavioral Decision Making With Hesitant Fuzzy Information Systems:Survey and Challenges
- Data-Driven Control of Distributed Event-Triggered Network Systems
- Driver Intent Prediction and Collision Avoidance With Barrier Functions
- Distributed Nash Equilibrium Seeking for General Networked Games With Bounded Disturbances
- Position Measurement Based Slave Torque Feedback Control for Teleoperation Systems With Time-Varying Communication Delays