电感传感器系统性能影响因素研究
2023-03-08贺志安范世珣邢立华
贺志安, 范世珣, 邢立华, 陈 宁
(1. 国防科技大学, 长沙 410073; 2. 北京航天控制仪器研究所, 北京 100039;3. 北京航天微机电技术研究所, 北京 100094)
0 引言
近年来, 光学成像导引伺服机构的精度需求达到了微弧度甚至亚微弧度数量级, 位移传感器作为光学成像导引伺服机构的核心传感器件, 是影响光学成像导引伺服机构精度的重要因素之一,对位移传感器的性能提出了更高要求。 电感位移传感器具有分辨率高、 线性度好、 稳定性高、 结构和安装简单等优点, 常用于精密测量领域[1]。
电感传感器的衔铁、 铁芯材料特性不同, 其等效阻抗随位移的变化特性不同。 如电导率的大小影响涡流效应的强度, 涡流效应将产生涡流损耗, 改变线圈的等效阻抗与品质因数, 等效阻抗会影响最佳激磁频率的选取。 涡流效应、 磁滞损耗对线圈的等效阻抗影响规律比较复杂, REN等[2]提出了复相对磁导率来计算线圈的等效阻抗,王洪波[3]提出了等效环路模型来计算等效阻抗。 同样, 信号处理电路的设计也会影响其分辨率与带宽。 目前, 数字锁相放大器的设计提高分辨率的方法主要为延长低通滤波器的积分时间, 积分时间的延长导致输出信号的带宽减小, 无法同时满足带宽与分辨率的需求。 李勇等[4]提出了采用Kalman 滤波器代替低通滤波器, 在保证动态跟踪性能的同时提高了抗噪能力。 李国林等[5]在数字锁相解调前使用自适应滤波器代替带通滤波器, 对待测信号做预处理, 改善了天然气中H2S 浓度反演系统的信噪比, 提高了系统的稳定性与鲁棒性。
本文从电感传感器的材料特性出发, 建立变压器模型, 分析涡流效应对线圈灵敏度的影响。根据不同材料的等效阻抗特性, 选取最佳激磁频率, 分析不同激磁频率对交流电桥输出信号非线性的影响, 并推导出电感、 电阻分离测量的计算方法。 通过数字锁相放大解调原理分析AD 采样噪声、 信号发生器电路中系统杂散噪声、 低通滤波器带宽、 信号处理速率对测量误差的影响, 并推导计算公式。 最后, 对铁氧体材料的传感器探头设计位移检测系统, 完成传感器静态性能测量。
1 差动电感位移传感器的工作原理
差动电感传感器以电磁感应为原理, 通过检测电感随位移的变化来检测位移。 结构参数一致的两探头组成的差动电感传感器如图1 所示。 铁芯与衔铁之间的气隙造成漏感和边缘效应, 漏感往往与主感抗具有同一量级[6]。 设漏感系数为k0, 边缘效应导致气隙磁路的截面积A1膨胀, 设膨胀系数为b0, 则线圈的等效电感计算公式为
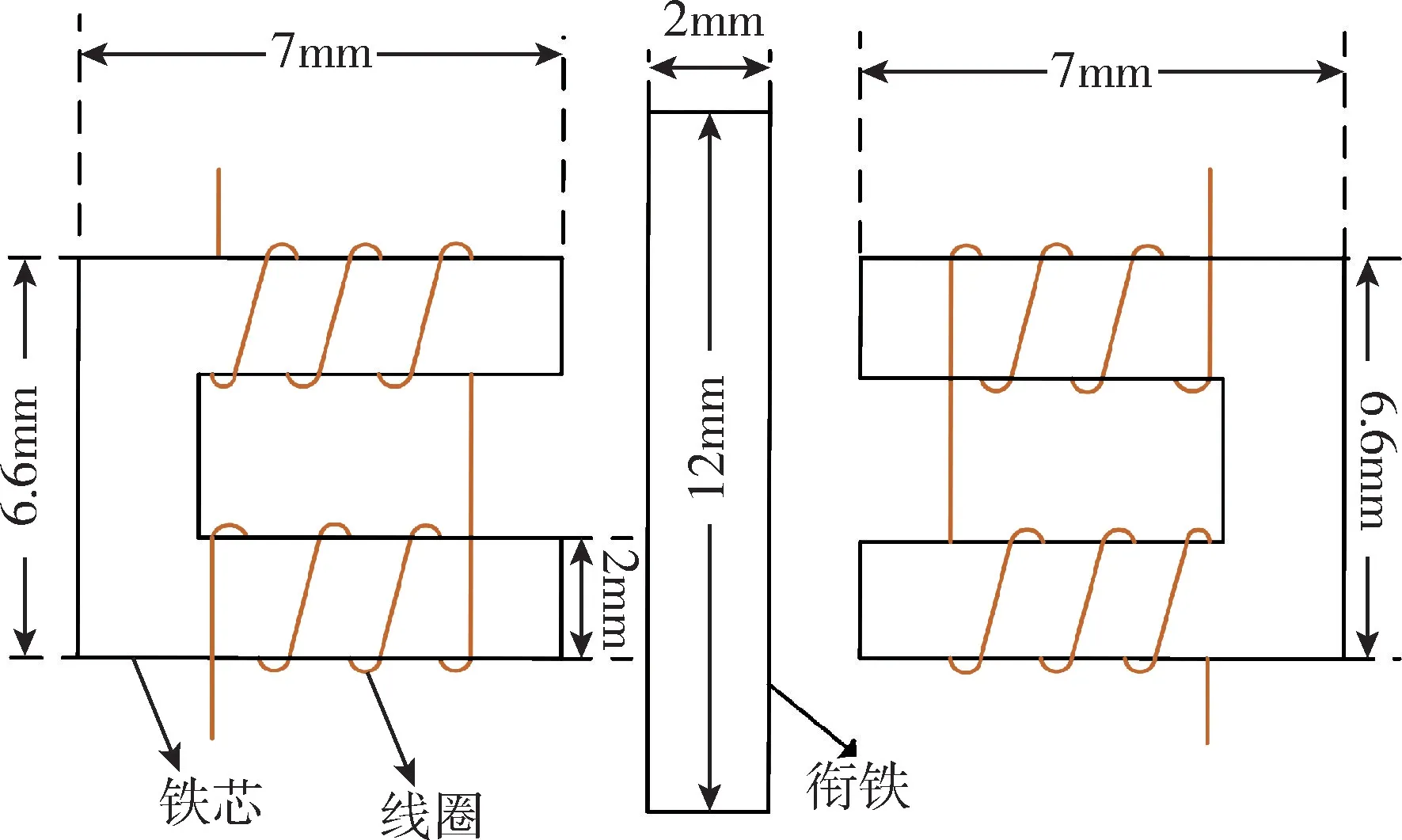
图1 差动电感传感器结构Fig.1 Structure diagram of differential inductive sensor
式(1)中,N为线圈绕制匝数,μ0为空气磁导率,δ为气隙长度。
涡流效应线圈产生的磁场方向与线圈产生的磁场相反, 从而铁芯线圈的阻抗特性也会随之改变[2]。 线圈的交变磁场与涡流磁场相互作用, 衔铁中涡流产生的磁场与线圈产生的磁场之间的耦合关系可以通过变压器模型[3,7]表示, 即衔铁相互绝缘的导体环与线圈之间存在互感。
假设衔铁涡流导体环的等效电感为Lec, 等效电阻为Rec, 探头(线圈与铁芯)电感为Lc, 串联电阻为Rc, 根据Kirchhoff 定律, 线圈的等效阻抗为
式(2)、 式(3)中,w为线圈的激磁频率,M为探头与衔铁的互感。 探头与衔铁之间的互感M的计算表达式为
式(4)中,k(δ) 与气隙δ和衔铁材料的电导率有关。
2 衔铁、 铁芯电导率对灵敏度的影响
当材料电导率高时, 如铁镍合金的电导率在1MS/m 以上, 电导率高则涡流环的等效电阻很小,满足wLec≫Rec[7]。 涡流环的等效电阻小, 衔铁内部电流很大, 涡流损耗大, 故线圈的等效电阻增大。此时, 涡流环反射电感值很大, 线圈的等效电感可以表示为
衔铁电导率越高,k(δ)越大; 衔铁与探头的气隙越小,k(δ) 越大。 磁阻效应同样如此, 气隙越小, 电感越大。 电感灵敏度可表示为
由式(6)可知, 磁阻效应与涡流效应的综合作用使得电感的灵敏度降低。
以0.2mm 的步长移动衔铁, 使气隙在0.2mm ~1.2mm 之间变化, 在每个位置上对传感器探头在1kHz ~100kHz 之间扫频。 当衔铁为高电导率材料时, 线圈等效串联电阻、 电感、 品质因数Q随频率、 气隙变化的关系如图2 所示。 当衔铁材料(如铁氧体等材料)的电导率很低时, 线圈等效串联电阻、 电感、 品质因数Q随频率、 气隙变化的关系如图3 所示。

图2 高电导率材料衔铁下线圈等效串联电阻、 电感、Q 值随频率、 气隙变化曲线Fig.2 Variation curves of equivalent series resistance,coil inductance and Q-value with frequency and air gap under high conductivity materials
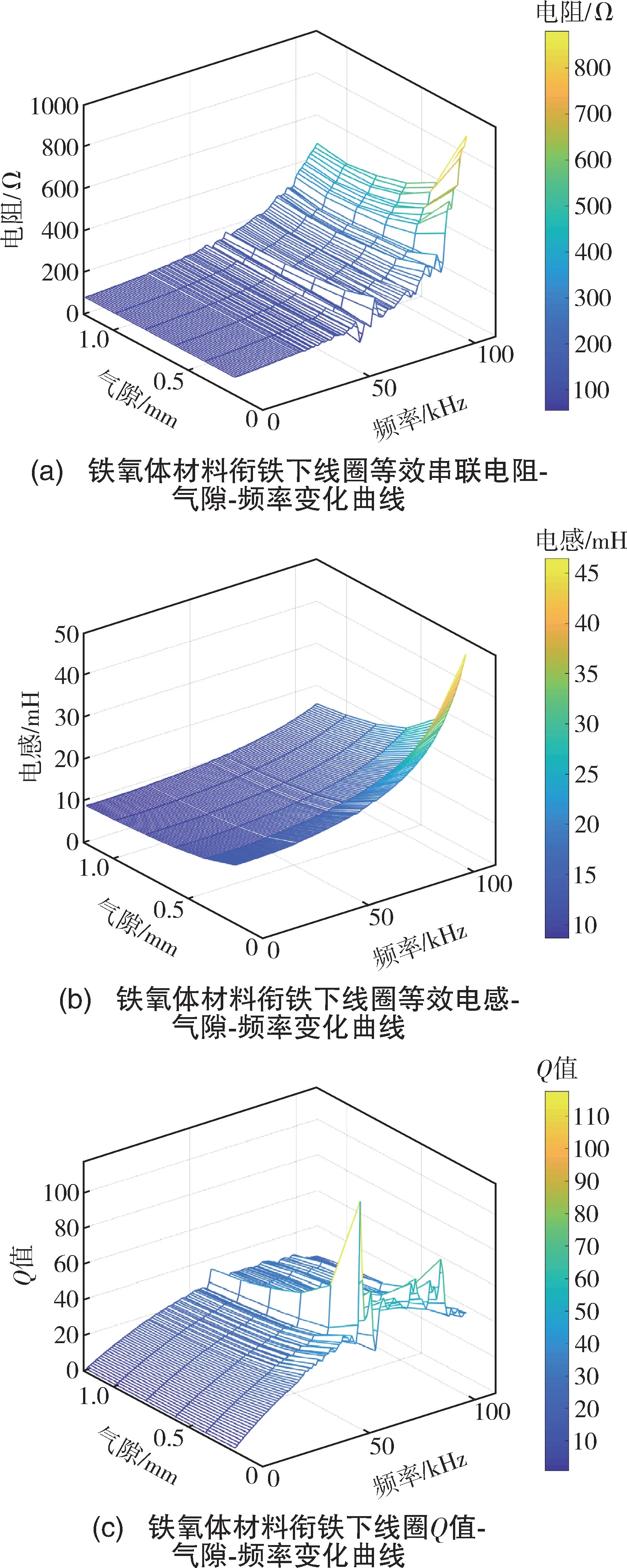
图3 铁氧体材料衔铁下线圈等效串联电阻、 电感、Q 值随频率、 气隙变化曲线Fig.3 Variation curves of equivalent series resistance,coil inductance and Q-value with frequency and air gap under ferrite materials
在低频时, 随着频率的升高, 电抗wL的值增大, 线圈等效电阻R值因趋肤效应、 邻近效应、 涡流效应与磁滞损耗也越来越大, 但是没有电抗值随频率变化增大的快, 根据Q值的计算公式可知,Q值随频率的升高而增大; 在高频时,趋肤效应、 邻近效应、 涡流效应越来越强, 线圈等效串联电阻值随频率变化比电抗快, 故Q值出现峰值。
由图2、 图3 对比分析可知, 相比于铁氧体(低电导率)衔铁, 高电导率衔铁的电感在整个气隙范围内的变化明显小很多, 而线圈的等效串联电阻明显大很多, 品质因数小。
3 线圈激磁频率对传感器信号的非线性影响
当以如图4 所示的输出端对称交流电桥作为信号转换电路时, 交流电桥输出的电压可表示为
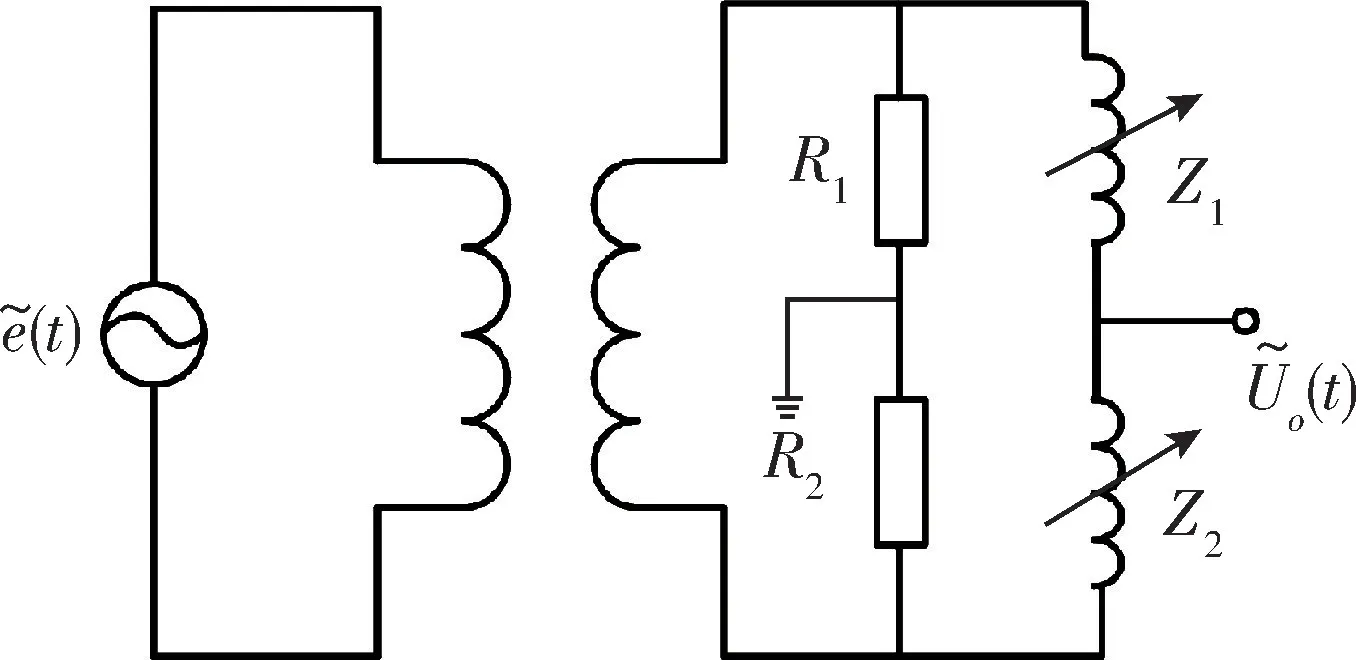
图4 输出端对称交流电桥Fig.4 Schematic diagram of symmetrical AC bridge at the output terminal
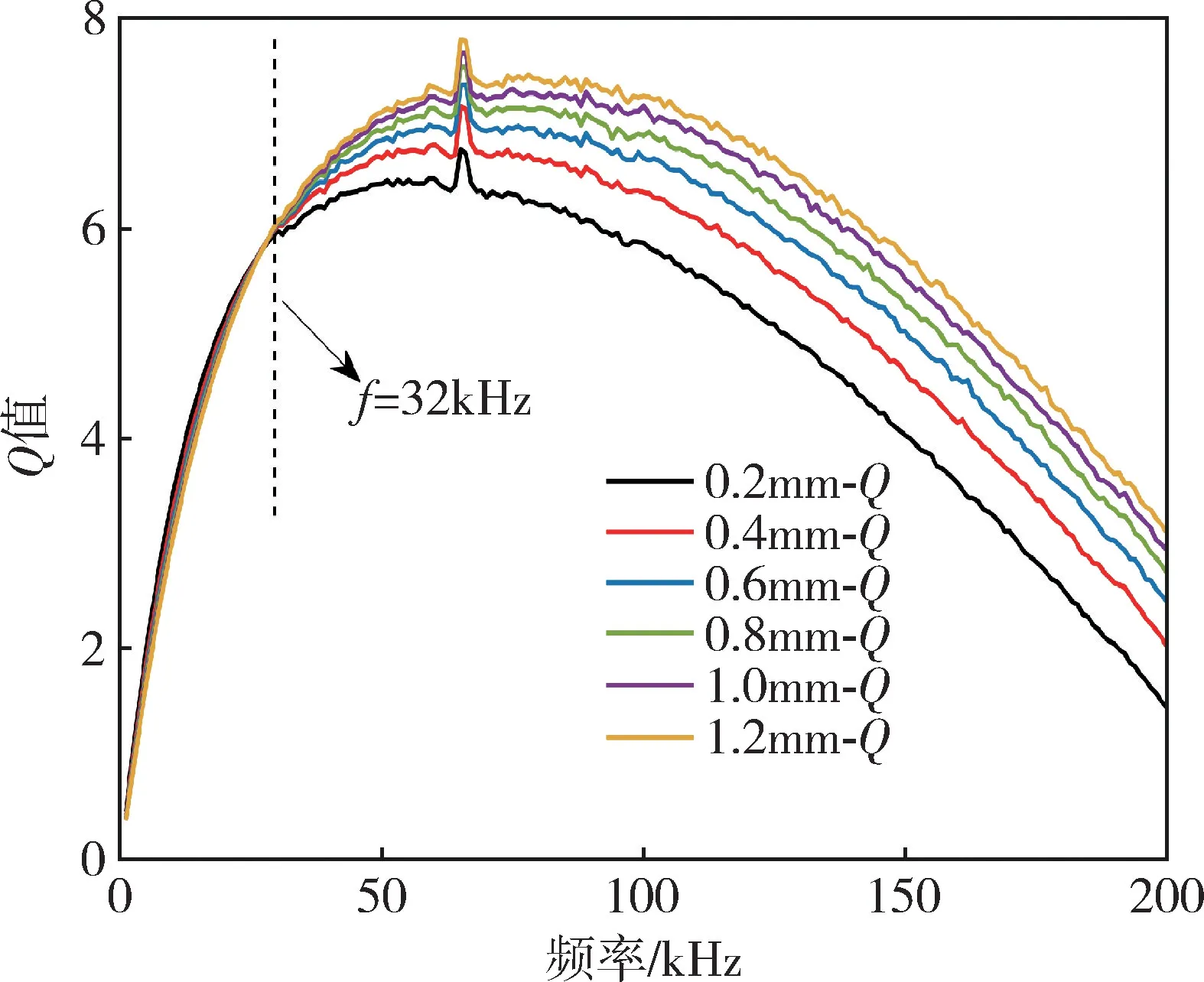
图5 高电导率材料下不同位移处Q 值随频率的变化曲线Fig.5 Variation curves of Q-value with frequency at different displacements under high conductivity materials
式(8)中, Δr为两线圈的电阻差, ΔL为两线圈的电感差。
设线圈激磁信号的幅值为A, 可以通过信号解调得到实部与虚部两路信号电压分别为Vx与Vy,则可得
当选取其他频率时,Q值随位移变化, 从而给位移的检测带来非线性。
当铁芯与衔铁材料为铁氧体(低电导率)时, 如图6 所示, 在不同位移下, 不存在某个频率点使得Q值大小基本相同, 但是在某段频率范围内, 电阻随位移变化基本不变。 在不同位移下线圈等效电阻随频率的变化曲线如图7 所示, 当频率在25kHz ~50kHz 时, 线圈等效电阻随位移变化基本不变, 即Δr的值很小。Q值大小在25kHz ~50kHz频率范围内大于15, 故输出电压随电阻变化部分可以忽略。 交流电桥输出的电压可表示为
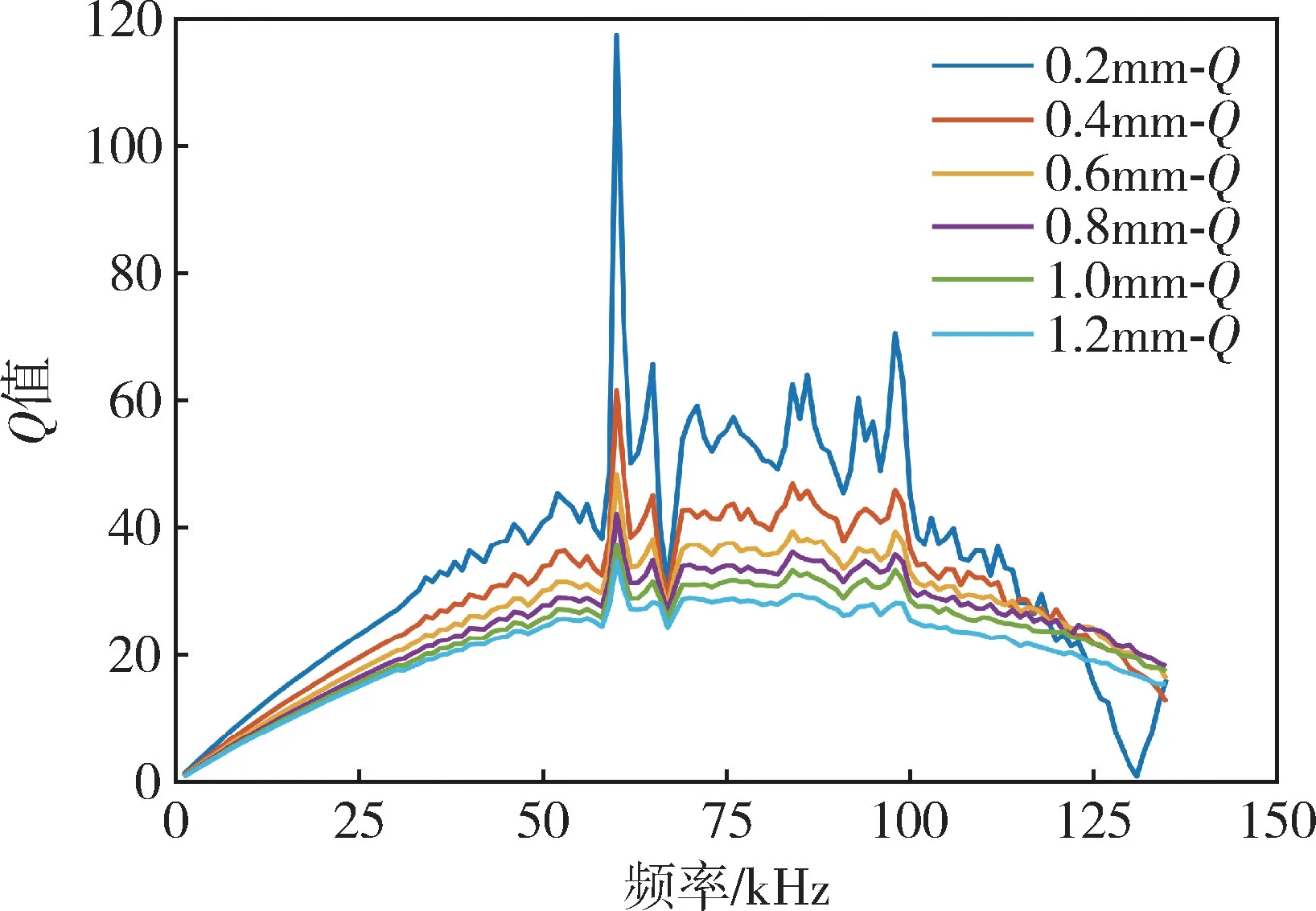
图6 铁氧体材料下不同位移处Q 值随频率的变化曲线Fig.6 Variation curves of Q-value with frequency at different displacements under ferrite materials
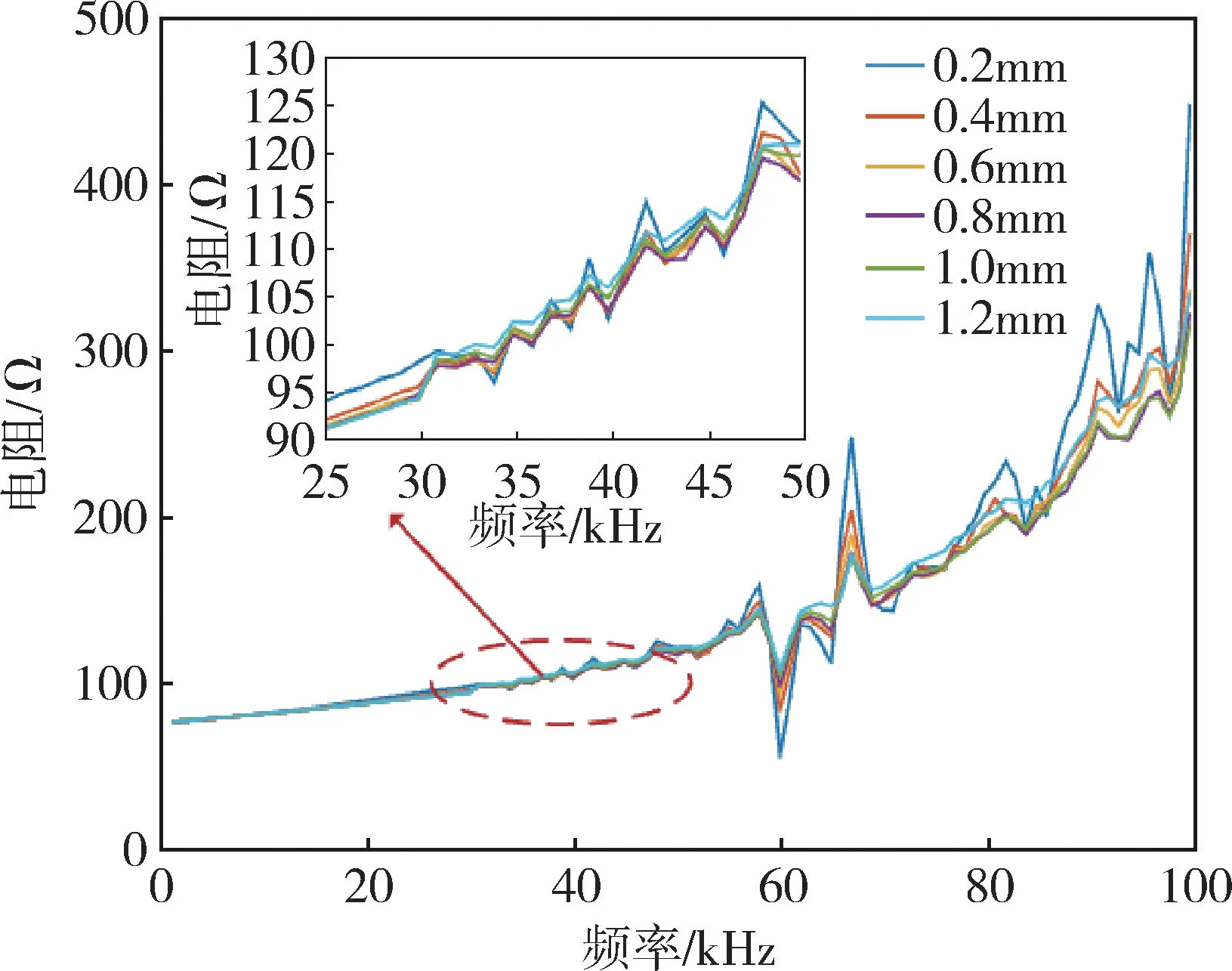
图7 铁氧体材料下不同位移处线圈等效电阻随频率的变化曲线Fig.7 Variation curves of coils equivalent resistance with frequency at different displacements under ferrite materials
故得到
当选择的激磁频率不在25kHz ~50kHz 时, 电阻随位移变化将不可忽略, 交流电桥输出信号不能实现电感的检测分离, 而且电阻随位移变化也不是线性的, 故给电感的检测增加了非线性因素。
4 数字锁相放大器设计对分辨率的影响
图8 为基于数字锁相放大器解调的位移检测系统框图。 检测系统输出的信号分辨率受到五方面因素的影响: 1)正弦信号发生器的杂散噪声; 2)信号采样噪声; 3)带通滤波器的带宽及其有限字长效应; 4)低通滤波器的带宽及其有限字长效应; 5)模拟电路中的噪声。 而带宽的大小主要受低通滤波器的带宽影响, 当滤波器系数的量化位数选取合适时, 相比于AD 采样噪声与模拟电路噪声, 其有限字长效应可以忽略不计。
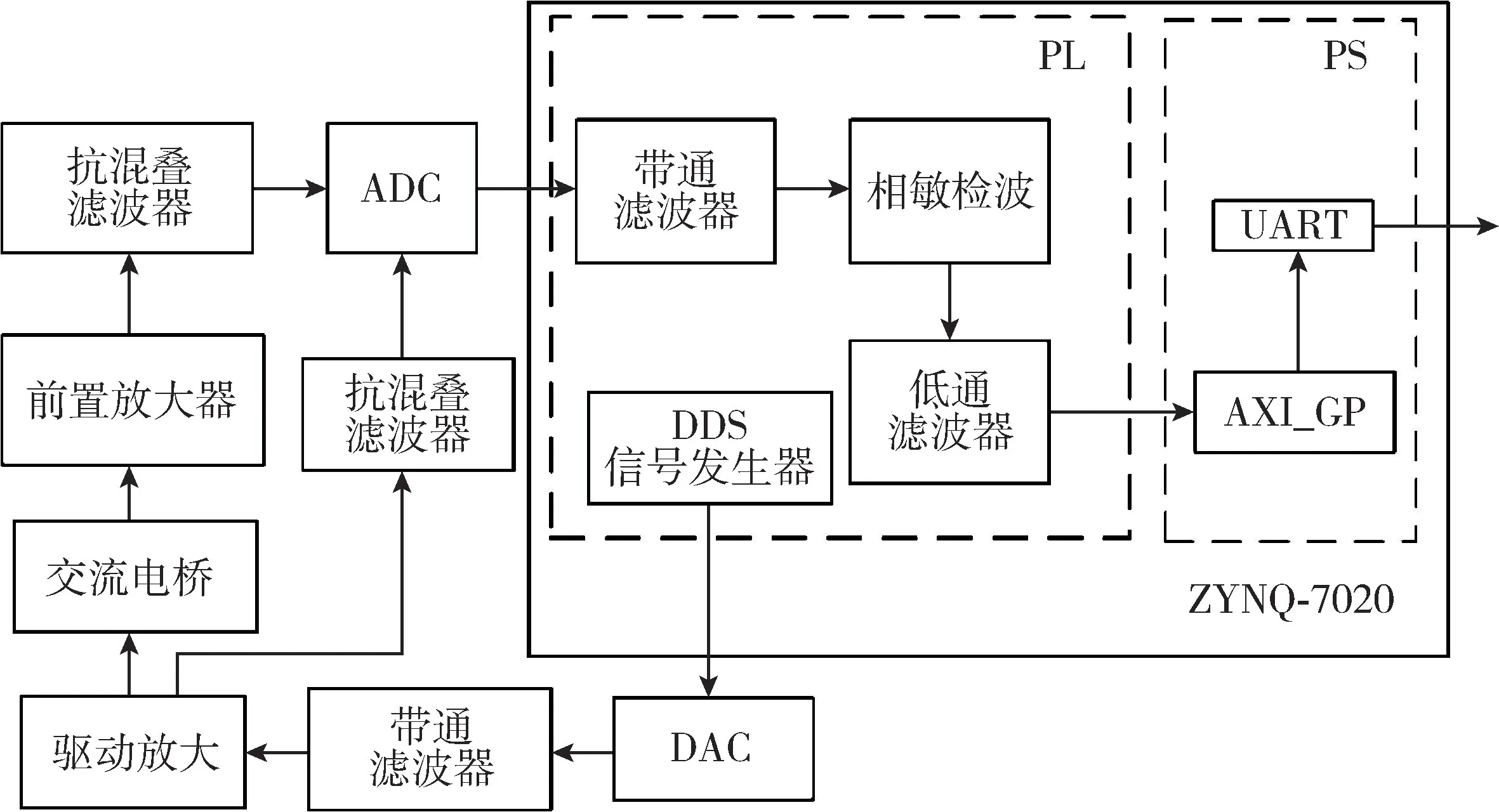
图8 位移检测系统整体框图Fig.8 Overall block diagram of displacement detection system
4.1 测量误差模型的建立
假设ADC 采样之前的传感器待测信号与参考信号为
式(14)中,nm(t)为待测信号噪声,nr(t) 为参考信号噪声,Am为待测信号幅值,Ar为参考信号幅值。 噪声的因素包括模拟电路引起的噪声和生成传感器激励信号的DDS 正弦信号发生器的杂散噪声。 经过ADC 采样之后的数据可表示为
信号Smq(KTs)与Srq(KTs)的方差可表示为
假设带通滤波器的带宽为NBW, 待测信号、参考信号经过带通滤波器输出的噪声为Nm(KTs)、Nr(KTs), 其功率大小分别等于滤波器输入处的噪声功率乘以NBW/fs,fs为采样率。 待测信号与参考信号经过相敏检波之后的方差为[8]
相敏检波之后, 经过低通滤波器可得传感器位移信号解调之后的值
由于nm(t)、εm(t) 不相关,nr(t)、εr(t) 不相关, 信噪比SNRm、SNRr与ADC 采样噪声、 DDS系统杂散噪声、 模拟电路噪声的关系可以表示为
当参考信号经过的带通滤波器带宽很窄、 待测信号经过的带通滤波器带宽为2 倍低通滤波器带宽时, 由于经过以32kHz 为中心频率的带通滤波器后不引入相位变化, 故待测信号与参考信号经过不同带宽滤波器之后不引入额外相位差。 误差NX(KTs)的RMS 有效值表达式修正为
4.2 采样、 解调频率对分辨率的影响
为了分析数字锁相解调系统输出带宽在1kHz时采样频率对系统输出信号信噪比的影响, 搭建了如图9 所示的数字锁相放大器解调仿真系统, 设输入信号的信噪比为66dB, 幅值为3.5V, 低通滤波器带宽为1kHz, 参考信号与待测输入信号的相位差为零。 设置AD 采样的有效位数为14 位, 分别设计频率为fs=512kHz、fs=16.384MHz、fs=65.536MHz, 在不同频率下保持AD 采样之前的信噪比不变, 得到如图10 所示的结果。 在频率为512kHz 时, 电压噪声的峰峰值为0.00120V, 解调后信号的信噪比为91.71dB; 在频率为16.384MHz时, 电压噪声的峰峰值为0.00025V, 解调后信号的信噪比为105.33dB; 在频率为65.536MHz 时,电压噪声的峰峰值为0.00012V, 解调后信号的信噪比为111.71dB。 仿真结果与测量误差模型公式计算结果一致, 故得出结论: 在数字锁相解调系统输出带宽保持一致时, 提高采样频率能够进一步提高解调后信号的分辨率。 同时可以推导出,当分辨率要求一致时, 提高采样频率, 输出带宽可以进一步得到提高。
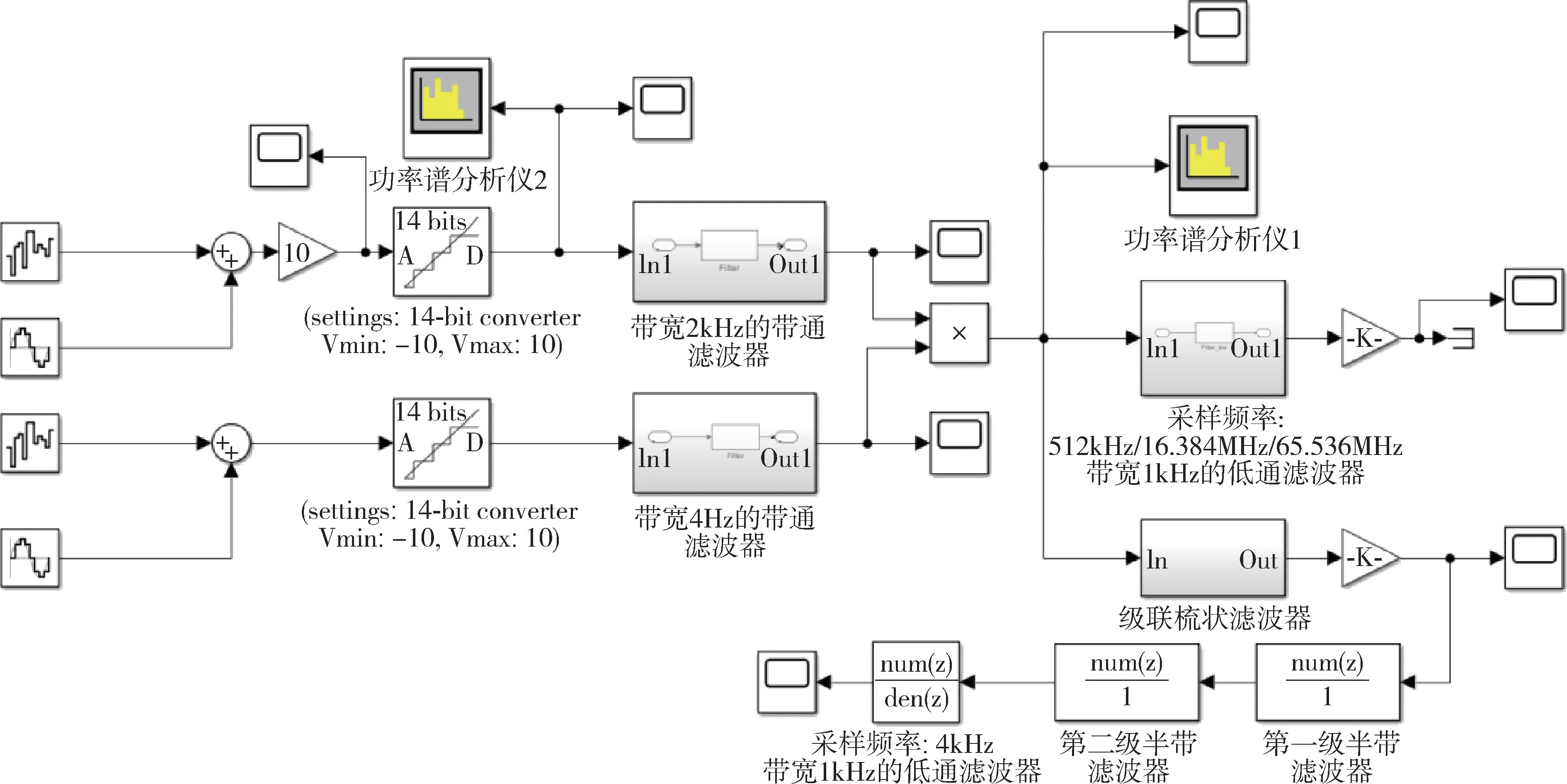
图9 数字锁相放大器解调仿真系统Fig.9 Schematic diagram of digital lock-in amplifier demodulation simulation system

图10 不同采样、 解调频率下的信号噪声Fig.10 Signal noise at different samplings and demodulation frequencies
5 实验结果
为了验证本文设计的电感传感器位移检测系统的性能与理论分析的一致性, 搭建的实验平台如图11 所示, 探头的线圈采用铜制漆包线绕制而成, 差动结构的两探头绕制匝数均为1000 匝, 铁氧体材料衔铁和铁芯的初始零间隙设置为0.7mm,在本实验中电感传感器测量的位移范围为-0.5mm ~+0.5mm。 根据前面的分析, 选取激磁频率为32kHz。 ZYNQ-7020 的FPGA 部分通过SPI串行通信控制DAC8832, DDS(直接数字频率合成)产生传感器的32kHz 激磁信号, 通过并口控制有效位数14 位的AD7606C-18 对位移信号数据进行采集。 由于AD7606C-18 芯片的最大采样频率为1MHz, 故采样频率选择512kHz, 同样在FPGA 中做锁相放大器解调的频率为512kHz。

图11 位移检测系统实验平台Fig.11 Schematic diagram of displacement detection system experiment platform
以100μm 的步进长度在-500μm ~+500μm内移动衔铁, 得到三次循环(正反行程为一次循环,正行程表示衔铁位移从-500μm ~+500μm, 反行程表示衔铁位移从+500μm ~-500μm), 经数字锁相放大器解调后, 输出电压随位移变化的曲线如图12(a)所示, 三次正反行程测试数据曲线基本重合; 图12(b)为每次行程上各位移点电压值与三次循环电压平均值的差。 通过六次实验测试数据可知, 在每个位移点上的传感器输出电压值相差很小, 基本一致, 即六组数据中每个位移点上位移检测系统输出的电压重复性较高。 重复性的计算可以表示为其样本标准偏差在一定置信度下的极限值, 以测试点中最大样本偏差处计算重复性,并以满量程输出的百分比表示结果。 三次循环中正行程与反行程的标准差如图13 所示, 正反行程中最大标准差为4.407mV, 则计算重复性为
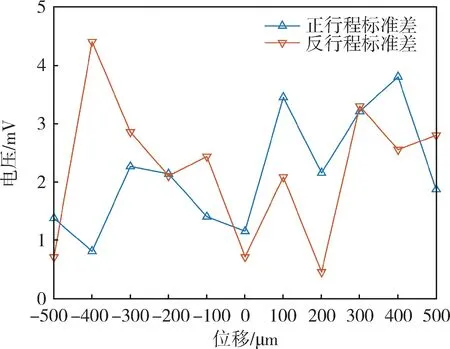
图13 正反行程标准差Fig.13 Standard deviation of forward and backward travel
传感器的灵敏度可以表示为采用最小二乘法计算的参比直线的斜率。 图14(a)为六次测量的电压平均值曲线与采用最小二乘法拟合出的直线,可知灵敏度为S=6.888V/mm。

图14 线性拟合与非线性误差Fig.14 Diagram of linear fitting and nonlinear error
线性度可表示为传感器输出与通过最小二乘法拟合直线间的最大绝对值偏差与满量程输出的百分比。 如图14(b) 所示, 最大非线性误差为0.3551V, 则计算线性度为
经过三次样条平滑非线性补偿后, 与最小二乘法拟合直线的电压偏差值随位移变化的曲线如图15 所示, 其最大电压偏差的绝对值为4.876mV,则非线性补偿后的最大非线性误差为

图15 三次样条平滑非线性补偿后的非线性误差曲线Fig.15 Nonlinear error curves after cubic spline smoothing and nonlinear compensation
设置低通滤波器的带宽为1kHz, 在位移-0.5mm 处,传感器的输出电压噪声如图16 所示,电压噪声的峰峰值为0.0012V, 故计算位移分辨率为
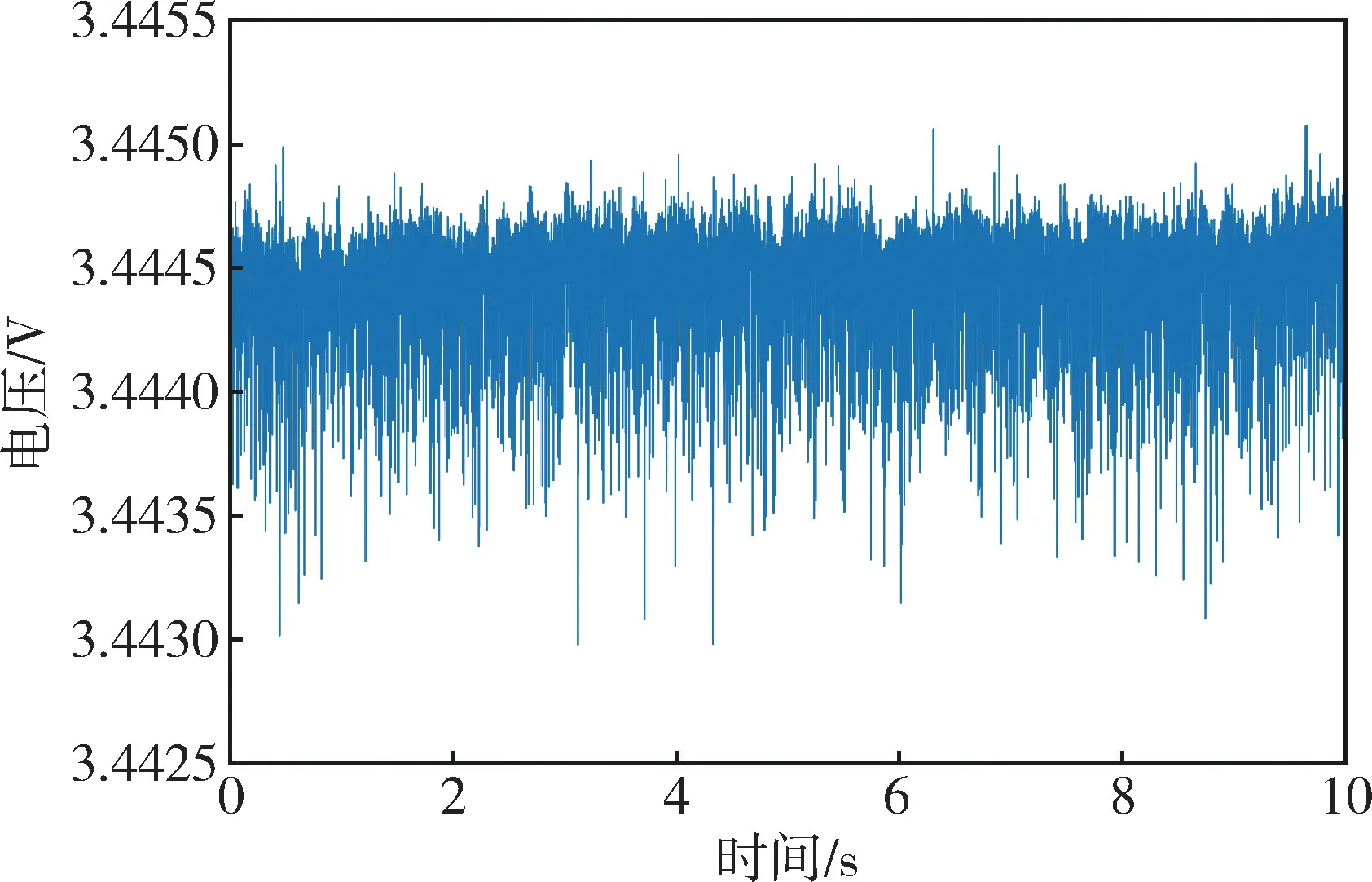
图16 -0.5mm 位移处的电压噪声Fig.16 Schematic diagram of voltage noise at -0.5mm displacement
故计算得到传感器位移检测系统输出信号的信噪比为91.56dB, 分辨率为0.00264%。 同时,当采样、 解调频率为512kHz 且带宽为1kHz 时,根据推导的测量误差模型计算出的信噪比为93.01dB, 理论模型与实验结果相差不大。
目前, 国内外性能比较好的传感器有米铱的电容传感器、 KAMAN 的电涡流传感器, 其性能如表1 所示。 对比可知, 本文设计的电感传感器的部分性能优于米铱与KAMAN 传感器中部分高性能型号的指标。
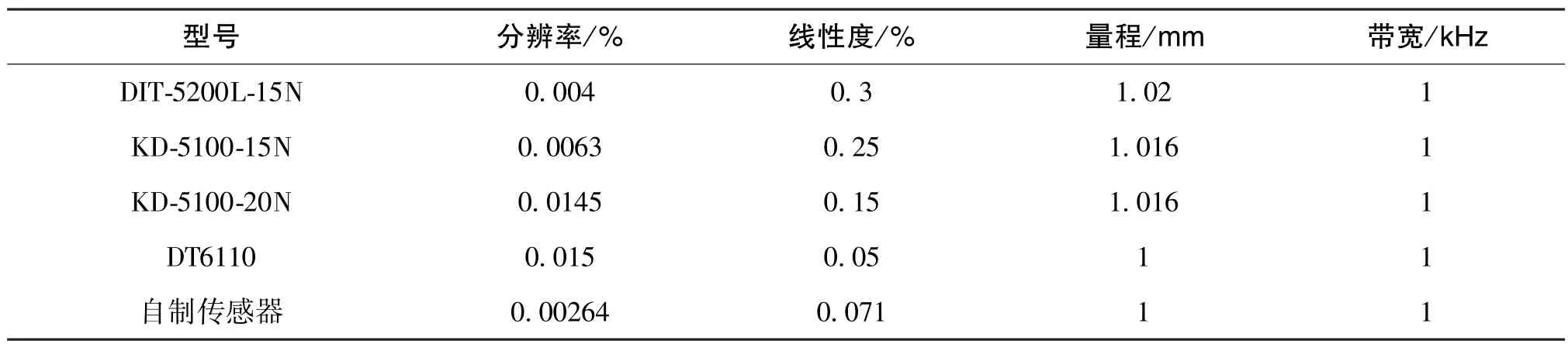
表1 米铱、 KAMAN 与自制传感器性能参数对比Table 1 Performance parameters of Micro-Epsilon, KAMAN and self-developed sensors
6 结论
本文从电感传感器的灵敏度、 线性度、 分辨率与带宽的性能出发, 分析其影响因素, 通过建立涡流效应的变压器模型, 设计了基于差动电感器的位移检测系统。 在位移范围内, 重复测量了三次正反行程下位移检测系统输出的电压。 实验结果表明, 在带宽为1kHz、 总量程为1mm 时, 位移分辨率为26.40nm, 重复性为0.275%。 通过三次样条平滑拟合进行非线性补偿, 线性度为99.93%, 灵敏度为6.888V/mm。 根据对比, 部分指标优于国外高性能传感器。
