基于高精度光纤干涉仪的世界时测量技术研究
2023-03-08冯文帅张首刚王学锋王惜康范运强
王 巍, 冯文帅, 张首刚, 王学锋, 王惜康, 范运强
(1. 中国航天科技集团有限公司, 北京 100048; 2. 北京航天控制仪器研究所, 北京 100039;3. 中国科学院国家授时中心, 西安 710600)
0 引言
世界时(Universal Time, UT1)是以地球自转运动为参考的时间计量系统, UT1 反映了地球在空间的自转角度, 与极移二分量(xp、yp)、 岁差、 章动一起被称为地球定向参数(Earth Orientation Parameter, EOP)[1]。 EOP 是实现天球与地球参考架坐标转换的关系参数, 在卫星、 飞船、 深空探测等应用领域, 对于需要在地面目标和空间目标之间建立坐标转换关系的问题, EOP 都是必不可少的。
飞行器轨道所在的地心天球参考系(Geocentric Celestial Reference System, GCRS)与地面站所在的国际地球参考系(International Terrestrial Reference System, ITRS)转换模型如下[1]
式(1)中,Q(t)为岁差-章动矩阵, 表示地极在GCRS 中的运动;R(t)为地球自转矩阵, 表示地球绕天球自转轴的自转;W(t)为极移矩阵, 表示地极在ITRS 中的位置变化。 地球自转矩阵R(t)反映地球实际自转的信息, 与UT1 的准确值相关。
在上述5 个EOP 参数中, 4 个轴向参数(极移二分量、 岁差、 章动)缓慢变化, 具有较好的可预测性。 而反映自转参数的世界时变化快, 其预测误差往往会比轴向参数预测误差大1 个数量级[2],所以世界时的测定精度直接影响航天器跟踪测量精度、 轨道测量精度和有关科学应用的分析精度[3]。
以测绘卫星需求为例, 测绘体系需求主要分为基础测绘、 详细测绘和精确测绘等3 类, 各种测绘体系需求的技术指标典型值如表1 所示。 在精确测绘任务中, 当绘制1∶10000 比例尺地形图时, 地面像元分辨率需要达到0.6m ~1m; 而当绘制1∶5000 比例尺地形图时, 相应的指标参数则需提高到0.1m ~0.3m, 对应的精密定轨精度要求最高可达0.01m 量级(1σ), 其要求世界时精度需达到0.01ms 量级。

表1 基础测绘、 详细测绘和精确测绘对比Table 1 Comparison of basic surveying, detailed surveying and precision surveying
随着测绘卫星、 导航卫星、 空间站、 深空探测等领域的精密定轨需求与日俱增, 精确的世界时测量成为一项亟待解决的问题。
1 世界时测量技术研究现状
1.1 主要的世界时测量方法
在过去很长一段时间内, 世界时是通过对恒星观测来实现的。 常用的测定方法和相应仪器有:1)中天法——中星仪、 光电中星仪、 照相天顶筒;2)等高法——超人差棱镜等高仪、 光电等高仪。 用这些仪器观测, 一个夜晚观测的均方误差为5ms左右。 依据全世界一年的天文观测结果, 经过综合处理所得到的世界时精度约为1ms。 因为各种因素(主要是环境因素)的影响, 长期以来, 世界时的测量精度没有显著的提高。 近年来, 随着科学技术水平的提升以及国际合作组织的建立, 更高精度的世界时测量方法主要有甚长基线干涉测量(Very Long Baseline Interferometry, VLBI)、 全球导航卫星系统(Global Navigation Satellite System,GNSS)、 卫星激光测距(Satellite Laser Ranging,SLR)等, 测量精度提高了1 ~2 个数量级。
目前, 国际上UT1 观测技术主要是以VLBI 为代表的天文几何测量技术。 天文几何测量技术对地球自转变化的测量属于间接测量, 通常需要对地球之外的人造卫星、 月球、 恒星或是河外射电源等参考目标源进行观测, 再通过解析观测数据以获得UT1 参数。 VLBI 技术能够对地球定向参数(EOP)的5 个参数进行全部高精度测量, 由国际地球自转与参考系服务(International Earth Rotation and Reference System Service, IERS)组织在其网站进行定期发布[4-6]。 目前, 基于VLBI 技术的世界时测量精度可达0.01ms 水平, 但该技术需要全球组网, 且数据处理中心位于美国和欧盟, 更新周期较慢, 对于我国航天等领域世界时的使用具有一定的局限性。
20 世纪90 年代以来, 随着惯性测量技术的不断发展, 利用高精度的惯性测量仪器, 如大型激光陀螺仪(Ring Laser Gyroscope, RLG) 和光纤陀螺仪(Fiber Optic Gyroscope, FOG) 等光学陀螺仪, 可实现对地球自转角速度的高精度实时测量。该测量技术利用固连在地球表面的光学陀螺仪直接测量地球自转, 通过Sagnac 效应所产生的频率差(或相位差), 进而对频率差(或相位差)进行解析以获取地球瞬时自转角速度, 其测量原理与传统的天文几何测量技术完全不同。 它基于狭义相对论和Sagnac 原理, 利用光学陀螺仪直接对地球瞬时自转角速度的变化进行测量[7-8], 而不需要通过观测地球之外的参考目标源来获取地球自转变化的信息。 此外, 该技术单个测试台站即可获取世界时, 无需全球布站; 无需地面布置大型观测站,隐蔽性好; 数据更新速度快, 可提供以小时为更新周期的世界时信息。 目前, 利用光学陀螺仪精确测量地球自转已逐步应用于地球固体潮观测、极移观测、 旋转地震波探测、 引力磁效应等科学研究领域[9-10]。
考虑到用于世界时测量的激光陀螺仪、 光纤陀螺仪几何尺寸较大, 边长或直径在1m 以上, 目前最大的超过了20m, 已不属于传统的陀螺仪范畴, 一般不再具有陀螺仪应具备的多个动态性能,因此本文中将用于世界时测量的光纤陀螺仪称为Sagnac 高精度光纤干涉仪或高精度光纤干涉仪。考虑到激光干涉仪通常指的是测量位移量的专用名词, 因此用于世界时测量的激光陀螺仪在本文中称为大型激光陀螺仪。
1.2 大型激光陀螺仪测量世界时现状
1993 年, 新西兰Canterbury 大学的STEDMAN教授等人建立了名为“Canterbury-Ring” (C-I)的大型环形激光陀螺仪[11], 该陀螺仪环形谐振腔所包围的面积达到0.85m2, 由该陀螺仪可测量到地球自转引起的拍频约为71Hz, 这是国际上第一个用于精确测量地球自转运动的大型激光陀螺仪。 在此后的研究中, 该研究团队又相继建立了“C-II”、“G-0” 等一系列大型环形激光陀螺仪[12], 其测量精度也随之不断提高, 直至2009 年, 该校建立了“UG-2” 超大环形激光陀螺仪[13], 该大型激光陀螺仪环形谐振腔包围的面积达到834m2, 测量精度也取得了较大突破, 目前该陀螺仪主要用于监测地球的微小地震效应、 固体潮效应等研究工作。
2008 年, 意大利的HURST 教授领导的研究小组研制建立了名为“G-Pisa” 的大型激光陀螺仪,该陀螺仪由多个环形激光器构成一个正六面体结构[14-15], 可同时在不同方向上检测到因地球自转运动而产生的Sagnac 效应, 主要用于地球自转监测并开展了包括极移探测、 旋转地震波探测等相关物理效应的研究[16]。
目前, 国际上测量地球自转角速度精度最高的激光陀螺仪是“Gross-ring” (G-ring)大型环形激光陀螺仪, 由1998 年德国慕尼黑技术大学的SCHREIBER 教授开始实施。 该陀螺仪位于德国Wettzell 天文观测站, 陀螺仪由激光谐振腔、 反射镜、 分束棱镜、 激光激发器、 探测器、 超高真空接口、 微晶玻璃底板、 微晶玻璃梁柱、 反射镜固定架等组成。 G-ring 的实物图如图1 所示[17], 该图是在压力控制器升起来的情况下进行拍摄的, 陀螺仪的环形谐振腔尺寸为4m×4m。

图1 德国G-ring 大型激光陀螺仪Fig.1 Diagram of German “G-ring” large-scale RLG
经过20 余年的不断完善, G-ring 陀螺仪对地球自转角速度的测量精度不断提高, 图2 为该陀螺仪的测量精度Allan 方差分析曲线, 零偏精度达到5 ×10-13rad/s(即1 ×10-7(°) /h), 可满足地球的半日周期潮汐项、 日周期极移项、 年周期极移项、 钱德勒周期极移项以及区域性潮汐项测试精度要求,图3 为该陀螺仪测试的120 天内地球日长变化以及与IERS 组织的C04 数据序列的比较。 由图3 可知,G-ring 陀螺仪有较高的日长测试精度, 并提供了以1h ~3h 为间隔的更新速率, 日长误差小于2ms[17]。
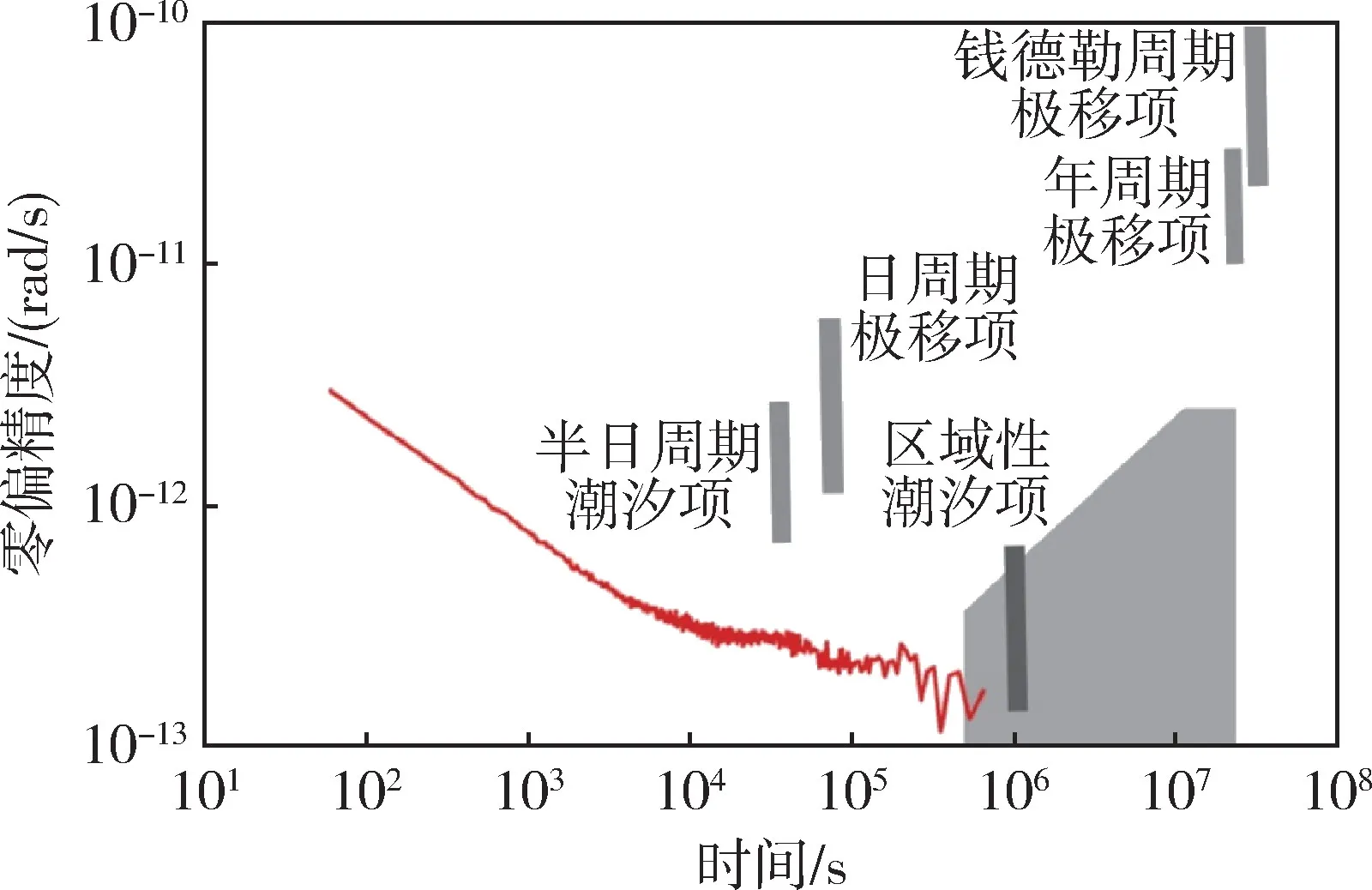
图2 G-ring 陀螺仪的Allan 方差分析曲线Fig.2 Allan deviation curve of G-ring gyroscope
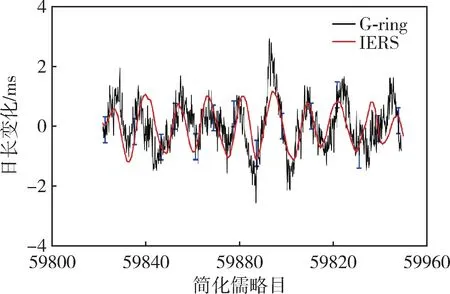
图3 G-ring 陀螺仪测试的地球日长变化以及与IERS 的比较Fig.3 Comparison between LoD signal by the G-ring gyroscope and IERS
2016 年, 德国慕尼黑大学的研究团队设计建造了名为“ROMY” 的大型激光陀螺仪[18], 该陀螺仪为正四面体结构, 边长为12m, 目前其角速度测量精度最高约2 ×10-12rad/s, 即4 ×10-7(°) /h,测量精度尚未达到G-ring 陀螺仪的水平, 尚未有世界时测量精度报道, 但其基于正四面体结构的四轴陀螺仪的优势是可同时在不同方向上测量到地球自转角速度的分量, 综合不同方向上的分量测量结果, 最终得出地球自转角速度矢量的变化。
1.3 大型光纤干涉仪测量世界时现状
随着光纤陀螺仪技术的不断发展和成熟, 利用光纤环取代传统的环形激光谐振腔所构建的光纤陀螺仪也可达到与激光陀螺仪相同乃至更高的测量灵敏度。
2013 年, 意大利和德国的研究人员曾先后研究利用商用互联网光纤通信网络构建了面积达20km2、 光纤总长度达到47km 的超大面积Sagnac光纤干涉仪, 并用于监测地球自转变化[19]。 该研究充分利用了城市光纤通信网覆盖面积大的特点,通过增大光纤环覆盖面积, 预计光纤干涉仪在理论上可以达到很高的测量精度[20]。 但是由于该光纤干涉仪的光纤环路受到非互易性测量环境、 地表振动、 温度不均匀等多重因素的影响, 最终对地球自转角速度的测量精度并未达到预期效果。
2023 年, 北京航天控制仪器研究所突破了多项提升高精度光纤干涉仪精度的关键技术, 研制了直径为1.5m 的大型光纤干涉仪BFOI-1500, 联合中国科学院国家授时中心实现了世界时的测量与解算, 并完成了与IERS 公报C04 时间序列的对比验证, 具体见下文。
2 基于高精度光纤干涉仪的世界时测量关键技术
2.1 低噪声、 高稳定的光纤干涉仪方案设计技术
为了实现零偏的高性能和标度因数的长期稳定性, 高精度光纤干涉仪典型方案由光功率自稳定型高斯谱掺铒光纤光源、 半导体光放大器等非线性光放大器、 高灵敏度光电探测器、 分束器、 Y波导相位调制器、 光谱整形器、 大型光纤环以及相应驱动、 调制、 解调及信号处理电路等组成,如图4 所示。

图4 高精度光纤干涉仪典型组成示意图Fig.4 Typical composition diagram of high-precision FOI
低噪声、 高稳定的光纤干涉仪工作原理如下:光功率自稳定的掺铒光纤光源产生大功率宽谱光源, 经高斯滤波器整形后, 进入半导体光放大器(Semiconductor Optical Amplifier, SOA), 调整SOA驱动电路使其工作在输入光的饱和吸收区(即非线性放大区), 压低光源的波动水平, 以降低光源的相对强度噪声, 经过SOA 后的光波需要通过偏振抑制器消除偏振度, 通过光纤耦合器进入Y 波导与光纤环组成的干涉光路中。 在干涉光路中, Y 波导需满足高芯片消光比、 低插入损耗、 低波形斜度、 低偏振串音等条件; 干涉光路中的超长光纤环可采取十六极精密对称绕法绕制保偏光纤环,光纤选用偏振保持性能较好、 更适合长距离拉制的普通保偏光纤, 光纤环为带胶绕制的无骨架环;经干涉仪光路传输后的光通过光纤耦合器以及滤波器进入高灵敏光电探测器, 由信号处理电路进行信号解调, 实现干涉回路敏感角速度信号的高精度检测。
高灵敏光电探测器将Sagnac 干涉仪返回的干涉信号转换为电信号, 因此要求探测器具有较高的响应度和灵敏度, 以提升光信号转换为电信号的信噪比。
为保证光路的光谱长期稳定及其引起的干涉仪标度因数稳定, 在光路中采取基于高斯谱滤波器的双光谱整形技术, 高斯谱滤波器可根据光源输入的谱型进行设计, 进而实现高稳定、 低谱损耗的全光路传输方案, 减小全光路的光源相对噪声, 提升干涉仪的精度水平。
为了保证长期工作条件下的光源功率稳定,光纤干涉仪采取功率自稳定的设计方案, 如图5 所示。 在光源的输出端增加分光比为2∶98(分光比可根据光源的实际功率进行调整) 的耦合器, 引出2%的光至探测器中, 通过检测探测器的光强信号并接入光源驱动及自稳定电路中, 实现对泵浦激光器驱动电流的闭环控制, 进而实现光源功率长期稳定。
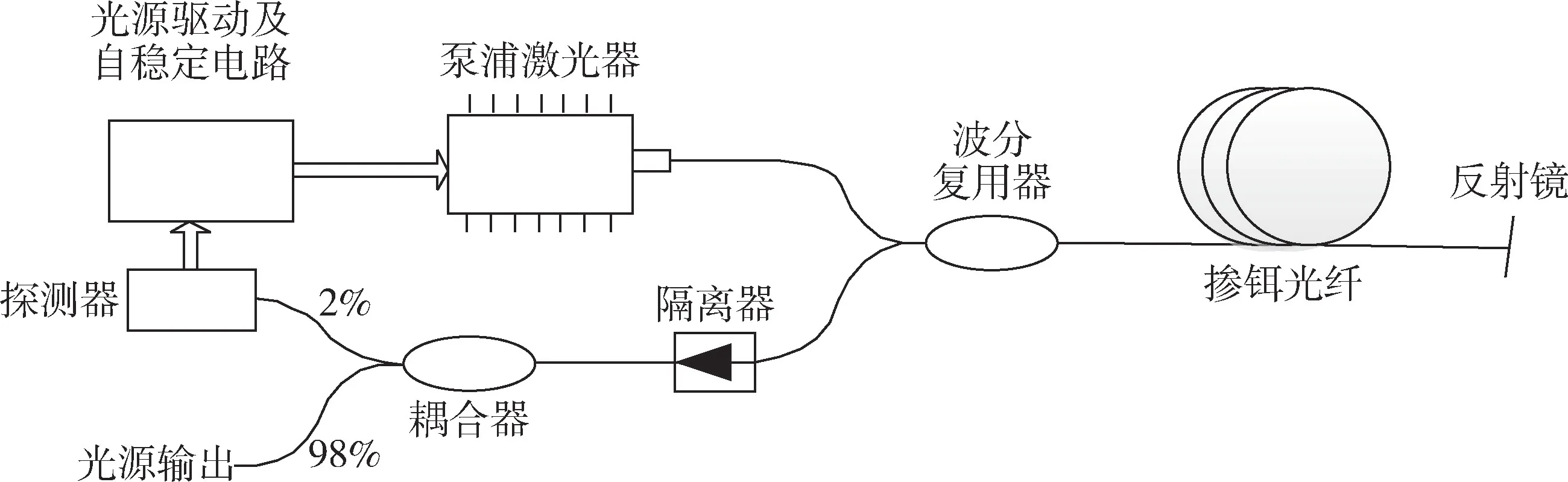
图5 功率自稳定掺铒光纤光源示意图Fig.5 Schematic diagram of power self-stable erbium-doped fiber source
为了满足低噪声的设计要求, 高精度光纤干涉仪采取基于非线性光放大的光源相对强度噪声抑制技术。 光路方案如图4 所示, 将掺铒光纤光源经1530nm(或1560nm) 光纤滤波器进行光谱整形后, 进入半导体光放大器中, 通过选取合适的参数使半导体光放大器工作在光的饱和吸收区, 对光源进行非线性放大, 并通过偏振度消除抑制的方法, 即可降低光源的相对强度噪声(13dB 以上)。实测抑制效果如图6 所示, 可显著提高光纤干涉仪的精度, 同时该光谱整形方案也可以满足光纤干涉仪标度因数长期稳定设计的要求。

图6 基于半导体光放大器的相对强度噪声抑制曲线Fig.6 Relative intensity noise suppression curves based on semiconductor optical amplifier
干涉仪电路系统一般可采用全数字闭环调制解调技术、 反馈增益误差控制技术、 光功率自动控制技术、 光源管芯精密温控技术等4 个闭环回路控制技术, 分别实现高精度角速度信号检测、 调制增益参数长期稳定、 光源功率及光谱长期稳定、光源发光参数恒温稳定等功能, 保证光纤干涉仪满足高精度、 低功耗、 长期参数稳定对电路的设计要求。
(4)还有施工单位招标文件不严格,合同签订不规范,施工单位利用漏洞,将自身管理不善的成本转嫁给业主,造成业主的预算超支。
2.2 光纤干涉仪互易性优化技术
光纤环在实际绕制中难以达到理想的状态,即使完全按照十六极对称绕法绕制, 也会出现一定的残余Shupe 误差。 考虑到光纤环以及Y 波导的尾纤距离光纤环中点最远, 是影响光纤干涉仪Shupe 误差权重最大的部分[22], 通过开展光纤环以及Y 波导尾纤对称性与光纤干涉仪Shupe 误差的量化分析与测试对比, 调整尾纤随光纤环中点的热对称性, 可减小光纤环的Shupe 误差, 降低光纤环的温度敏感性[23]。
光纤环的热对称性补偿方法如下: 在光纤环其中一端尾纤接入长度为lx的光纤, 如图7 所示。 光纤长度的增加使光纤环的中点发生了改变, 整个光纤环的累积温度误差也随之改变。 接入长度为lx的光纤之后, 光纤干涉仪的Shupe 误差可表示为[23]

图7 光纤环对称性偏差长度调整示意图Fig.7 Schematic diagram of adjusting the length for fiber coil symmetry deviation
式(2)中,L为光纤环长度,D为光纤环直径平均值,n为光纤的折射率,为光纤的折射率温度系数,为z处光纤在t时刻的温度变化率,为z处光纤的折射率热应力系数,为测试接入的lx段光纤的折射率平均热应力系数,为t时刻lx段光纤的温度变化率。
新增光纤lx引起的光纤干涉仪Shupe 误差变化可表示为
由式(3)可知, 控制接入尾纤的长度能有效控制引入的温度误差, 使其与光纤环固有温度误差进行叠加或抑制, 实现对光纤环温度性能的有效调整, 使光纤环温度误差值接近目标误差值, 达到控制光纤环温度误差的目的。
通过光纤环热对称性补偿技术, 可对大型光纤干涉仪约数万米长的光纤环实现毫米(mm)级热对称性控制, 实现光纤环绕制后Shupe 误差的抑制, 大幅降低光纤环的温度敏感性。
2.3 世界时测量误差校正技术
为了将光纤干涉仪的输出数据转换为高精度的世界时, 需要将测试中的测试误差进行分析、抑制和补偿, 对测试过程进行优化, 对测试数据进行滤波与修正处理。
针对光纤干涉仪的实际应用环境和敏感特点,除了惯性仪表常见的测试设备误差、 输入条件误差、 信息读取误差、 模型误差、 数据处理误差等测试误差, 基于高精度光纤干涉仪的世界时测量系统的测试误差还包括局部地质环境变化以及地球潮汐作用下引起的光纤干涉仪输入轴定向误差等, 需要从上述误差中分离出地球自转的变化等输入量变化, 如图8 所示, 需依据不同观测误差的影响机理, 细化分解各项观测误差, 并采取相应的数据处理与误差修正方法, 以实现高精度的世界时解算与输出。
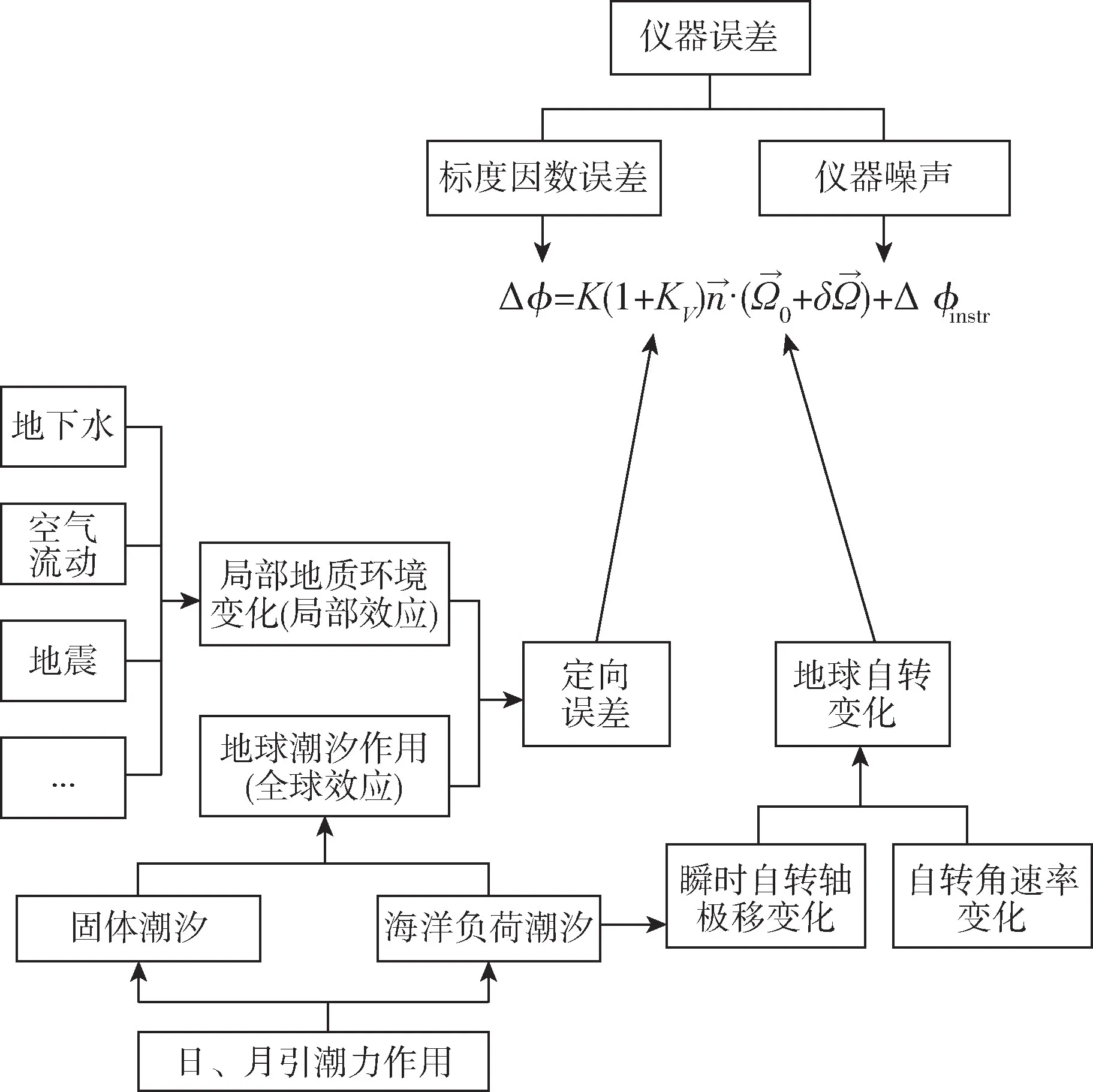
图8 世界时测量系统的环境误差示意图Fig.8 Schematic diagram of environmental errors for the UT1 measurement system
因此, 基于高精度光纤干涉仪的世界时测量系统包括: 测量地球自转角速度的高精度光纤干涉仪、 多路测量测试平台倾斜角度的高精度电子水平仪、 多路测量环境以及仪器内部温度变化的温度传感器、 气压传感器、 湿度传感器、 用于时间同步的原子钟以及世界时数据解算系统等。
光纤干涉仪观测地球自转的基本原理是基于Sagnac 效应, 由Sagnac 效应基本方程出发, 通过利用地固坐标系与局部平台坐标系之间的旋转变换关系建立干涉仪观测方程[24]
式(4)中,Ω′为光纤干涉仪原始输出的角速度观测值, 利用光纤干涉仪输出数字量通过标度因数转换得到;Ω0为地球平均自转角速率; ΔΩp为地球瞬时自转轴极移引起的角速度观测误差, 是系统观测误差之一; ΔΩdT为干涉仪观测平台倾斜变化引起的角速度观测误差, 包括非潮汐和潮汐效应引起的地球几何形变倾斜, 是系统观测误差之一; ΔΩdφ为干涉仪测站纬度变化引起的角速度观测误差, 主要来自地球潮汐效应, 是系统观测误差之一; ΔΩ为地球瞬时自转角速率变化, 该项是系统主要提取的观测量之一;xp、yp为瞬时地球自转极的极坐标;m为地球瞬时自转角速率变化分量;φ0为干涉仪测站的纬度;λ0为干涉仪测站的经度; dT为干涉仪观测平台法线方向在南北方向的倾斜角度变化; dφ为干涉仪测站的纬度变化。
其中, 干涉仪的定向误差修正方法可以为:利用水平仪观测结果对原始观测数据进行倾斜改正, 再利用潮汐模型修正改正过程中引入的地方铅垂线变化。
地球瞬时自转轴极移修正主要考虑自转轴在大气负荷潮汐引起的地表质量重新分布以及大气与地球潮汐摩擦产生的耗散作用共同影响下产生的周日、 半日极移影响。
图9 为使用上述模型之后的地球自转参数实际测量误差修正前后的对比结果。 修正之后, 干涉仪测量自转角速率的精度提升了4 倍以上。

图9 地球自转参数测量误差修正效果Fig.9 Correction effect of measurement error for Earth rotation parameters
光纤干涉仪的角速度输出与世界时的映射转换关系如下:
将提取的地球自转角速度值与地球平均自转角速度Ω0作差, 可得到地球自转角速度变化量ΔΩ,通过对t0~t时间段内解算所得的ΔΩ值进行数值积分, 可得到该时间段内(UT1-UTC)值的变化量
如果在光纤干涉仪测量的初始t0时刻标定了初始的[UT1 -UTC]t0值, 则利用光纤干涉仪对地球自转的实时测量数据, 并依据式(5)连续对解算所得的ΔΩ值进行积分累加, 即可解算得到任意时刻的[UT1 -UTC]t值。 为方便对解算结果进行比对校准, 解算的UT1 参数结果同样以(UT1 -UTC)的形式给出。
3 基于高精度光纤干涉仪的世界时测量试验验证
3.1 光纤干涉仪精度试验情况
本文研究团队在解决了上述影响高精度光纤干涉仪互易性误差、 定向误差等关键技术问题的基础上, 于2023 年完成了高精度光纤干涉仪的研制, 实物如图10 所示。 为了更精确、 更稳定地测量地球自转角速度, 该干涉仪安装于陕西省秦岭地区某精密温控实验室内, 表头指天向, 该测试环境具备恒温、 恒湿、 低噪声、 低人为扰动等优点。

图10 2023 年BFOI-1500 高精度光纤干涉仪实物Fig.10 Diagram of high-precision BFOI-1500 in 2023
图11为高精度光纤干涉仪测试地球自转角速度以及位于相同测试平台上水平仪的倾角输出曲线。 为了更好地展示短期的测试精度以及不同日期的敏感角速度变化, 选择其中的15 天典型数据进行分析, 时间段为2023 年5 月29 日0 时~2023年6 月13 日0 时, 对应的简化儒略日(MJD) 为60093 ~60108, 数据时间跨度为15 天, 每个数据间隔为1h。 由图11 可知, 光纤干涉仪的阶段性输出具有明显的周期性输入轴倾斜现象(温度、 气压以及固体潮汐、 极移等因素引起), 与水平仪输出相关度较高。
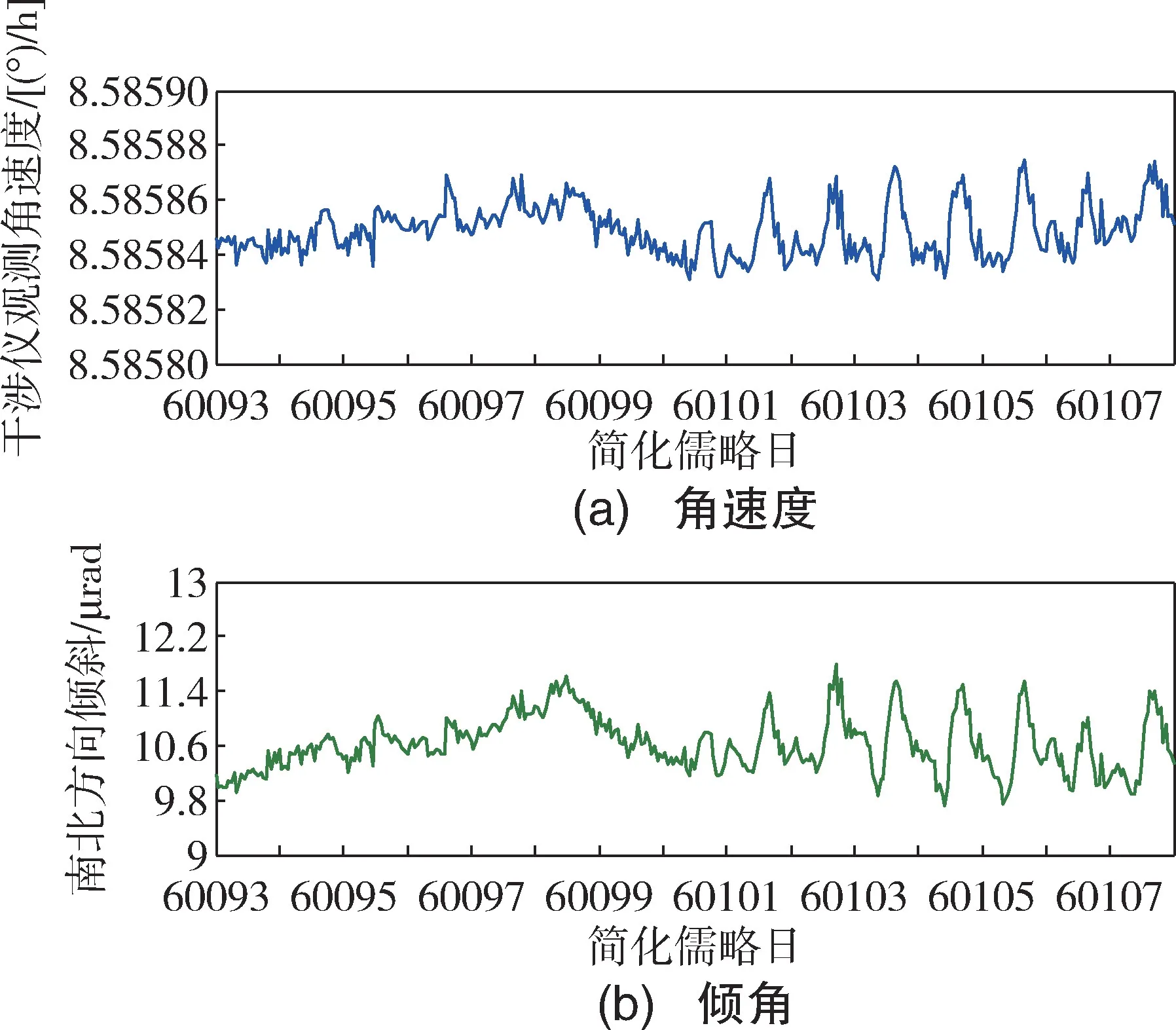
图11 光纤干涉仪角速度输出与水平仪倾角输出数据对比曲线Fig.11 Comparison curves between the FOI angular velocity output and the electronic level inclination angle output
采取前文提出的周日项及定向测量误差消除方法, 误差改正前后的光纤干涉仪角速度输出数据如图12 所示。 可以看出, 周期项误差和定向误差基本得到消除, 在温度与倾角稳定阶段(取连续6h 数据), 光纤干涉仪零偏稳定性最好结果为9.7 ×10-7(°) /h(1h, 1σ)。
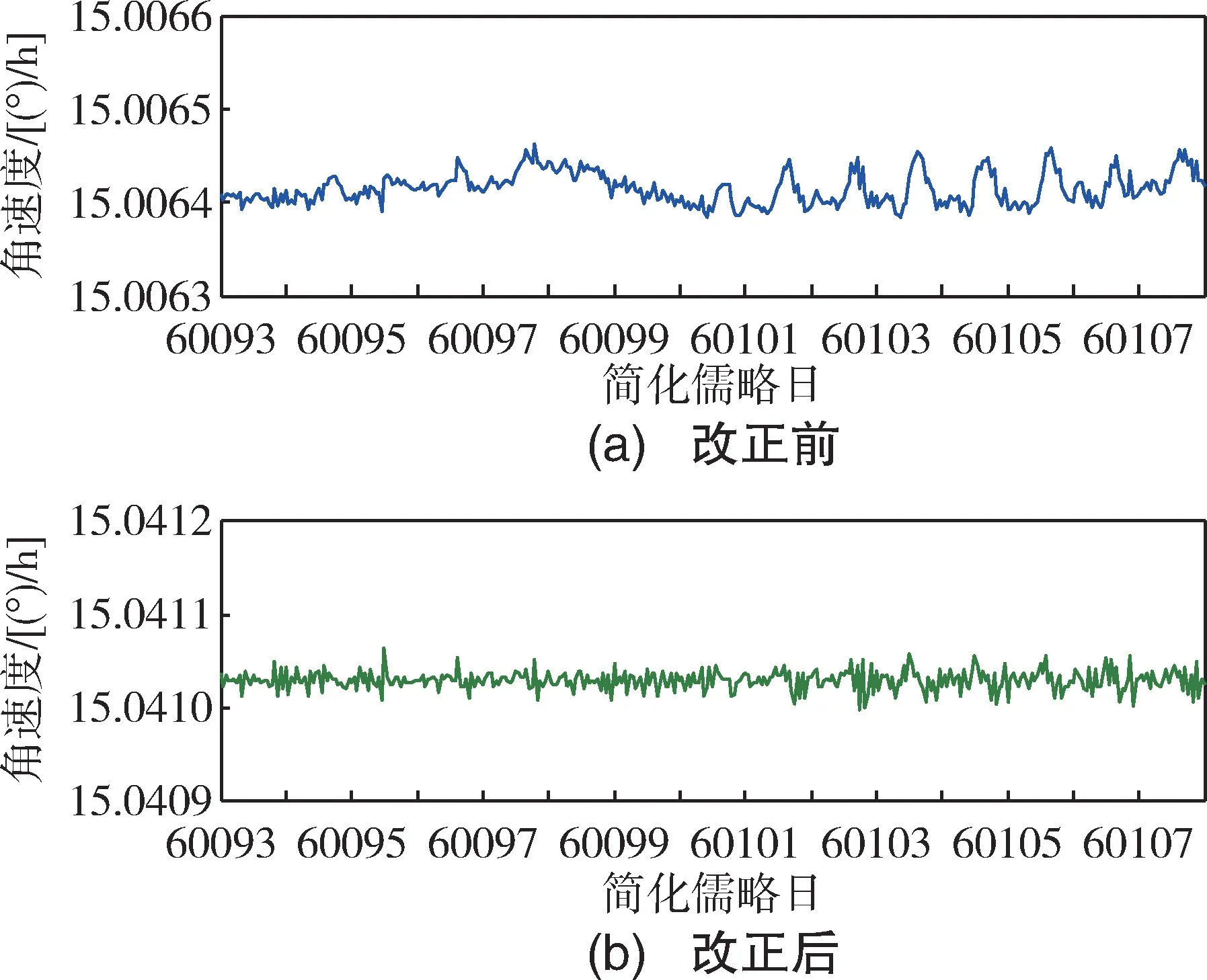
图12 光纤干涉仪消除周日项变化以及倾斜改正后的角速度输出结果Fig.12 Output curves of FOI for eliminating diurnal variations and angular velocity after tilt correction
注: 选取连续6h 数据依据《GJB 2426A-2004光纤陀螺仪测试方法》 第5.12 条零偏系列测试:测试时间应大于1h 或样本数应在6 次以上。
Allan 方差分析方法是一种对原始数据先进行差分、 然后进行各积分时间下稳定性分析的方法,该方法可大幅消除环境因素引起的漂移对精度的影响, 用该方法分析超高精度光学陀螺仪的噪声或精度比较合适, 德国的G-ring、 ROMY 等激光陀螺仪均用Allan 方差分析方法得到的参数来描述陀螺的精度水平。 选择图12 中经倾斜改正后的数据稳定段进行BFOI 的精度分析, 图13 为BFOI 的Allan 方差分析曲线。 参照G-ring、 ROMY 等激光陀螺仪的精度评价方法(取Allan 方差曲线的斜率为零的拟合底部值), 即精度指的是零偏不稳定性,图13 所示的BFOI 的零偏不稳定性优于1.0 ×10-6(°) /h。
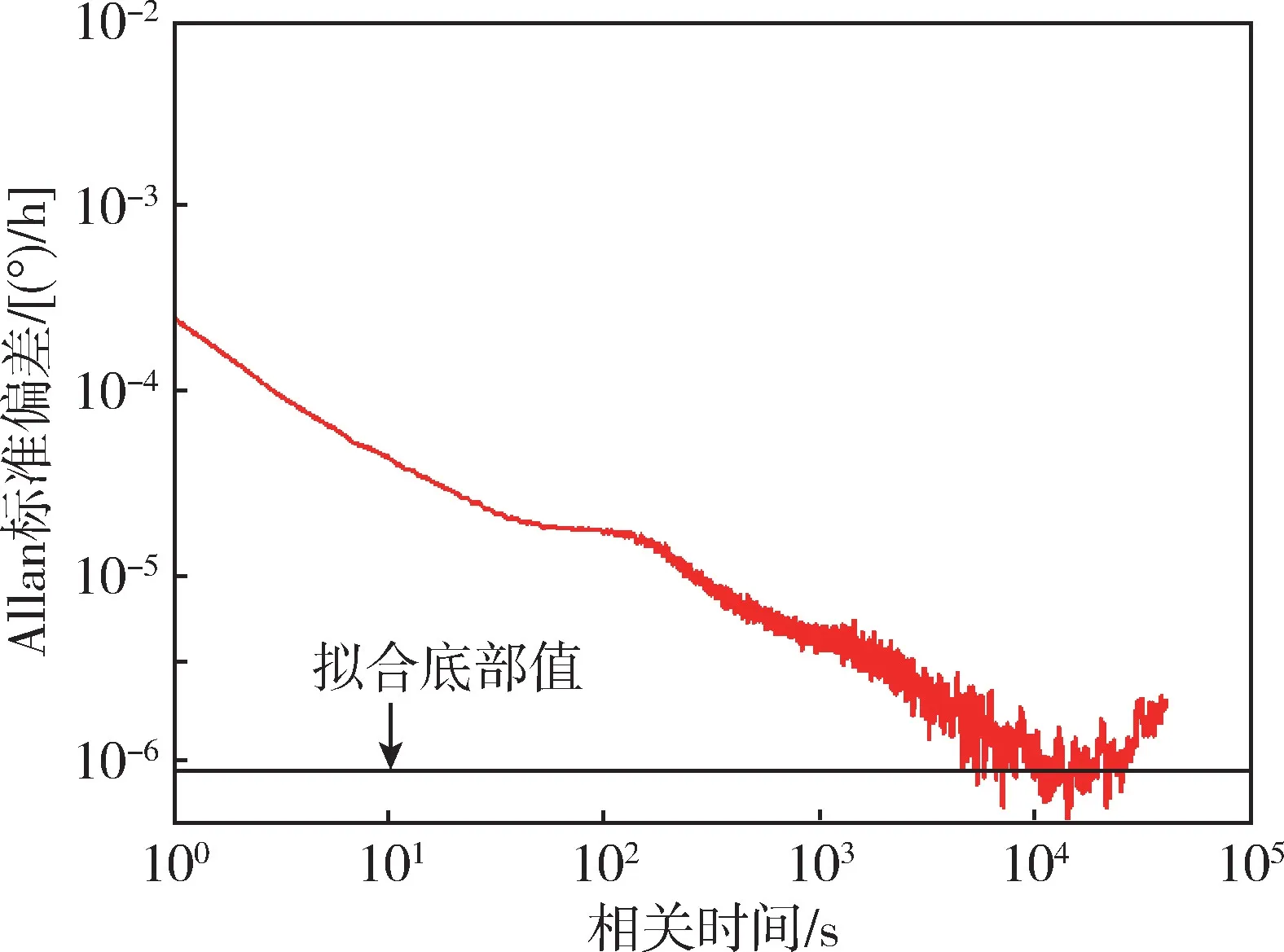
图13 光纤干涉仪Allan 方差分析曲线Fig.13 Allan deviation curve of BFOI
零偏不稳定性这一指标通常反映了仪表在不同积分周期下的精度最优值, 目前本文实现的BFOI-1500 光纤干涉仪精度指标为国际上已报道的光纤干涉仪/光纤陀螺仪最高水平。
3.2 世界时测量及验证情况
根据式(5)对图12 中的光纤干涉仪角速度改正值进行世界时解算, 将干涉仪初始时刻t0与IERS公报的C04 时间序列[UT1 -UTC]t0相对齐, 将测量解算得到的世界时与IERS 公报的UT1 进行对比验证, 对比结果如图14 所示。 数据结果显示, 在连续15 天的观测过程中, 世界时测量系统的UT1 测量值较稳定, 其标准偏差约1.5ms, 与IERS 公报值相比对, 世界时测量最大误差为7ms, 实现了已报道的光纤陀螺仪/干涉仪测量世界时的最高精度水平。 与德国G-ring 激光陀螺仪世界时测量精度(最大误差2ms)处于一个数量级的水平, 验证了基于高精度光纤干涉仪的世界时测量系统的UT1 测量功能和高性能。
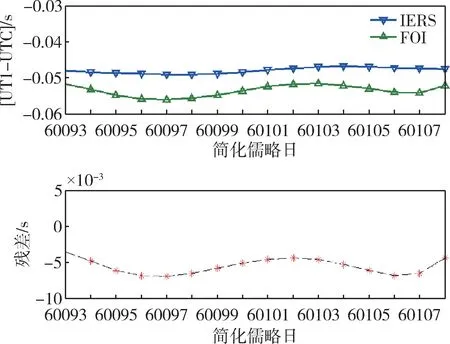
图14 基于高精度光纤干涉仪的世界时测量结果及与IERS 对比验证情况Fig.14 UT1 measurement results based on FOI and comparison with IERS
4 讨论
考虑到本文实现的高精度光纤干涉仪直径仅1.5m, 相对于德国G-ring 激光陀螺仪的4m ×4m的尺寸, 光纤干涉仪面积仅为激光陀螺仪的1/9,且还有更长的光纤环绕制余量、 更低噪声的探测与信号处理技术, 因此高精度光纤干涉仪未来有较大的潜力达到甚至超越G-ring 激光陀螺仪的世界时测量精度。
光纤干涉仪除了可测量地球的自转参数, 也可通过多站点联合解算的方式来测量地球极移等大地测量参数, 还可用来测量地震、 日月引力潮汐、 大气角动量等引起气候环境变化的物理量,在诸多领域具有广阔的应用前景。
