自动跟踪型加速度计电流数字转换电路数字闭环控制研究
2023-03-08丁浩珅谢元平樊振方
丁浩珅, 谢元平, 樊振方
(1. 国防科技大学前沿交叉学科学院, 长沙 410073;2. 国防科技大学南湖之光实验室, 长沙 410073)
0 引言
自动跟踪型加速度计电流数字转换(Current to Digital Conversion, CDC)技术作为加速度计模数转换电路的一种[1], 为了达到最优控制效果, 需要设计一种响应速度快、 工作稳定、 通带平稳的闭环控制传递函数。 关于CDC 的数字闭环控制系统,数字信号处理器是实现控制功能的核心, 它根据系统的控制要求, 按照一定的规律或规则对系统实施控制[2]。 反馈控制为PID 算法, 由现场可编程门阵列(Field Programmable Gate Array, FPGA)来实现, 算法性能的好坏将直接决定整个闭环系统的性能。 所以, 根据系统要求, 设计出最佳的PID 算法参数至关重要。
ROJO 等[3]进行了基于PID 算法的数字闭环控制系统研究, 这种控制算法至今仍在沿用。 国内目前对数字闭环的研究更多集中在硬件设计与代码优化方面[4-5], 缺少针对性的控制系统理论研究。本文针对PID 参数优化问题, 建立了CDC 的闭环控制系统, 采用根轨迹法对控制系统的PID 参数进行分析求解。 校正后系统的动态性能指标接近期望值, 具有较大的稳定裕度。 最后, 用Simulink 仿真验证了PID 参数的实用性和方案的可行性。
1 CDC 系统组成及工作原理
CDC 的结构如图1 所示[1]。 CDC 主要由模拟电路与数字控制处理模块两个部分组成: 模拟电路主要是积分电路、 电压转电流电路(Voltage to Current Circuits, V/I)组成; 数字控制处理模块由高性能的数字信号处理器(单片机或者FPGA)和高分辨率的模数转换器(Analog to Digital Converters,A/D)、 数模转换器(Digital to Analogue Converters,D/A)构成。
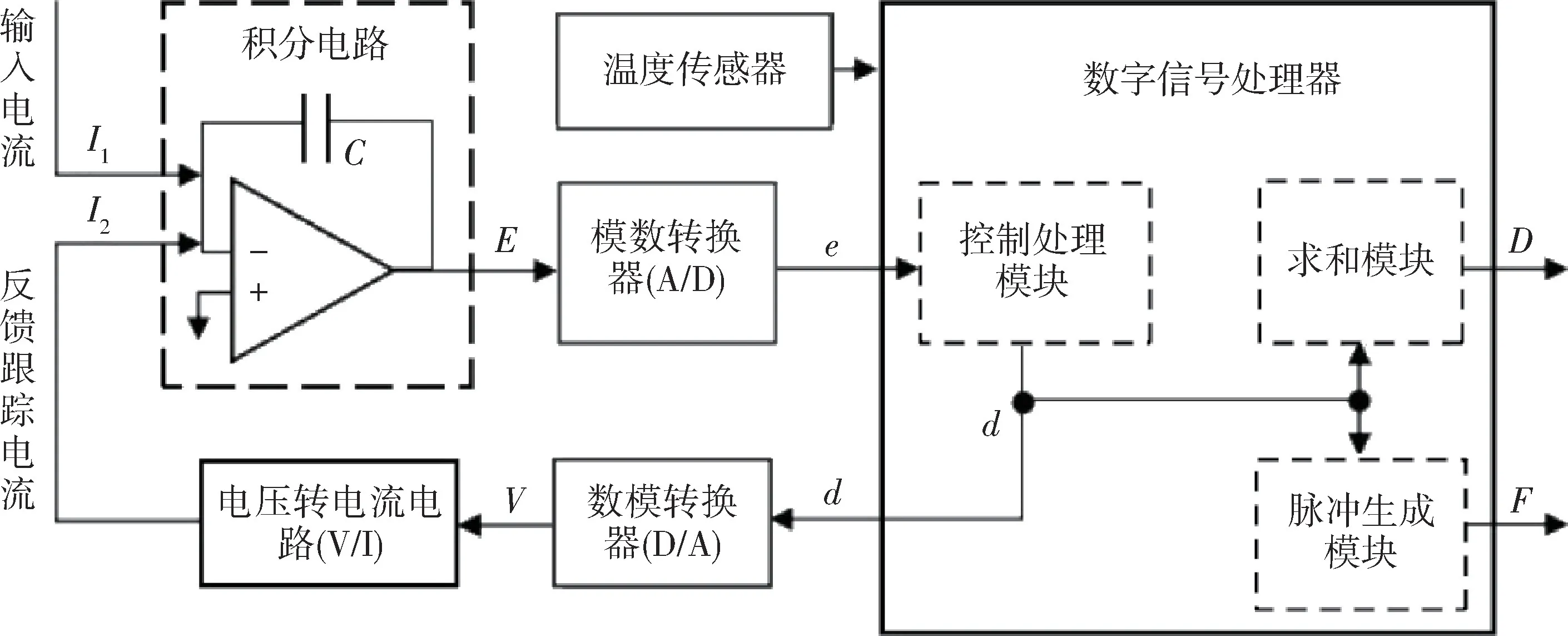
图1 CDC 结构图Fig.1 Structure diagram of CDC
该闭环系统的工作原理如下: 以数字信号处理器为闭环回路的控制核心。 加速度计传感器将测量的加速度变化转换成相应变化的电流量I1, 积分电路对输入电流I1进行积分后输出误差电压E,E经过A/D 转换变成数字量e,e经过数字信号处理器处理后, 数字信号处理器产生调整数字信号d经D/A 和V/I 转换为反馈跟踪电流I2作用于积分电容C上,I1、I2二者电荷保持平衡, 实时反馈控制使误差电压E稳定在0 附近, 有
式(1) 中,En为第n个采样周期中的误差电压,C为积分电容的电容值, A/D、 D/A 采样频率为fS,T为采样周期, 采样周期T=1/fS。 数字信号处理器将调整数字信号d通过串口输出到上位机, 有
式(2)中,L为数字输出d与输入电流I1之间的标度因数, 单位为LSB/mA;dn为第n个周期内的数字信号。 由式(2)可知, 数字信号d正比于输入电流I1在采样周期T内的平均值。 当采样频率fS较高时,d可视为输入电流I1的实时采样。 说明CDC 一方面完成对输入电流I1的反馈再平衡, 另一方面直接将与输入电流I1成正比的数字量d传递给导航计算机, 其全数字的处理方式也能解决模拟闭环方案中的精度损失等问题。
2 仿真模型
为保证CDC 的闭环控制系统可以稳定运行,需要设置好数字信号处理器的参数, 本电路采用数字PID 控制作为数字信号处理器的控制算法, 通过构建控制系统, 求解数字PID 参数, 对校正后的控制系统进行仿真验证, 证明该方法的有效性。
2.1 仿真模型说明
一个模拟信号经过A/D 变换成为二进制数字信号时, 必须经过量化处理和编码。 本电路采用的是16 位高精度模数转换芯片, 该芯片转换精度高, 产生的量化误差很小, 故可忽略量化误差的影响。 因此, 在电路仿真分析中可以略去量化误差和编码环节, 建立系统传递函数时可以将所研究的电路控制系统当成采样系统, 仅含有采样及零阶保持器两种过程, 再进一步将其看作时间离散系统来进行z变换分析[6]。
通过z变换, 可以把传递函数、 根轨迹等概念应用于离散控制系统中。 首先, 将转换电路当成连续系统去分析, 算出模拟PID 参数后, 将PID 环节代入系统, 相当于对整体系统加入校正环节[7],通过校正来改善系统的动静态特性。 随后, 将PID控制器离散化, 利用Simulink 对电路系统进行仿真。
2.2 连续控制系统
将图1 中的电路系统看成是连续控制系统, 输入电流I1、 反馈跟踪电流I2等效成系统输入信号和输出信号, 积分电路等效成积分环节, 积分电容的电容值为C=0.1μF =1 ×10-7F, 积分环节表达式为
图1 中的V/I 表示为电压转电流环节, 用1/R表示,R为330Ω 电阻, 通过电压转电流环节可得W2(s) =1/330。 为了在控制系统仿真中等效A/D采样效果, 本文在之后的Simulink 仿真中使用零阶保持器, 这样连续控制器的输出在离散化后会产生一定时长的延时, 延迟模块的传递函数为
式(4)中, 延时τ大约为0.5T[8], 得τ=0.5T,T为A/D 采样周期。
控制处理模块看成是控制器控制环节, 用C(s)表示。 各个系统的等效环节用图2 的子方框图中的传递函数来表示。
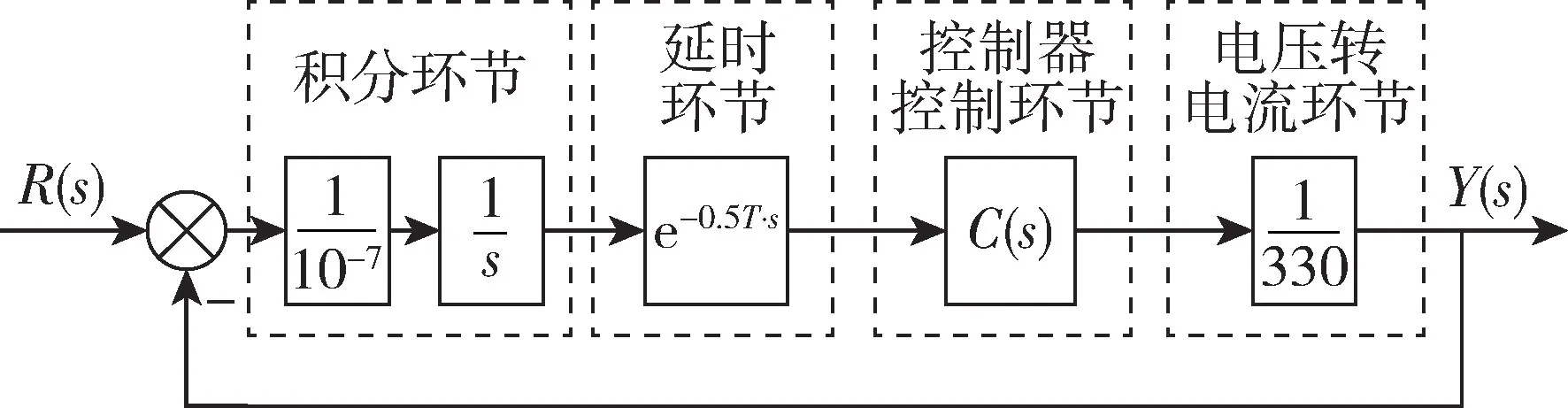
图2 连续控制系统各框架示意图Fig.2 Schematic diagram of each frame for the continuous control system
将积分环节、 延时环节和电压转电流环节整理汇总, 得传递函数G(s), 表达式为
e-τs在τ较小的情况下可以用一阶Pade 进行线性化处理, 精度较高, 计算方便[9]。 计算公式如下
根据经验, 一般设定采样频率T为系统带宽的10 ~20 倍, 这样可以确保数字控制器与连续控制器的性能相匹配[10]。 由于输入电流信号I1的频率一般不超过5kHz, 所以本文最终选取的采样频率为50kHz。 因此, 将式(6) 代入式(5) 中,τ=0.5T,T为0.00002s, 化简后得传递函数G1(s),表达式为
则整个连续系统的传递函数如图3 所示。
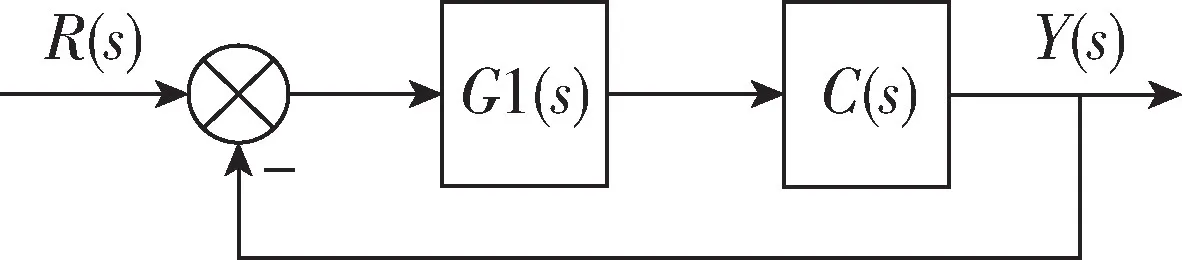
图3 连续系统传递函数结构简图Fig.3 Structure diagram of transfer function for a continuous system
连续控制系统的闭环传递函数表达式为
3 PID 控制器参数的求解
在采样周期足够小的情况下, 使用各种连续域设计方法设计出符合要求的连续域控制器, 然后将连续控制器离散化, 这种方法称为连续域-离散化设计法[8]。 连续系统通过串联PID 控制器达到校正系统的效果, 所以本文使用根轨迹法来设计出符合要求的校正装置, 来求解PID 控制器。
3.1 根轨迹法的校正原理
根据连续控制系统要求实现的动态性能指标期望值, 来计算出系统的期望闭环主导极点, 如果系统显示根轨迹通过期望的闭环主导极点, 说明系统性能指标符合要求, 无需校正; 否则需要在系统中引入新的开环零点z和极点p来改变根轨迹的走向, 如果引入的开环零极点合适, 就可以使根轨迹经过期望的闭环主导极点[11]。
待校正系统的开环传递函数的一般表达式为
式(9)中,zi为系统开环零点,pj为系统开环极点,K为系统的根轨迹增益。
对待校正系统进行根轨迹校正时, 计算校正装置步骤如下[12]:
1)根据系统要求实现的动态性能指标期望值,确定系统的期望闭环主导极点位置, 表达式为
2)串联一超前校正装置C(s) =K(s+z) /(s+p), 通过引入新的开环零点z和新的开环极点p改变原根轨迹的走向, 使1 +G0(s)C(s) =0 的根轨迹通过期望的闭环主导极点s1,2。
3)根据式(11)(幅值条件表达式) 和式(12) (相位条件表达式)计算求解出K、z和p。
3.2 校正装置的参数计算
根据实际电路需求, 本文将系统动态性能指标期望值设定为: 上升时间tr≤1.8 ×10-5s、 调整时间ts≤4.3 ×10-5s、 超调量σP≤3%。
根据公式
根据ts和σP的期望值, 代入式(13)和式(14)中, 解出ζ≈0.74 和ωn≈112612rad/s, 再由式(10) 得出期望闭环主导极点s1,2= - 83333 ±75744j。
常用的PID 控制包括PID 控制、 PI 控制和PD控制三种类型。 本文采用PD 控制对系统进行超前校正, PD 控制器表达式为
联立式(7)和式(15), 得到校正后系统函数表达式为
引入一个零点z和极点p, 画图求解零极点,如图4 所示。
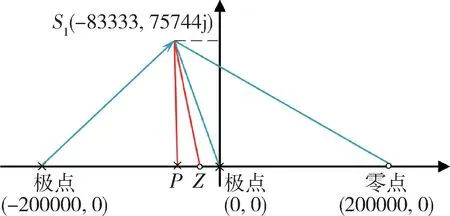
图4 零极点示意图Fig.4 Schematic diagram of zero and pole
先设定零点z为( -60000, 0), 由式(12)(相位条件表达式)可计算出p= -68610。
将z= -60000、p= -68610 代入式(11)(幅值条件表达式) 中, 解算出K≈2.0206。 将z=-60000、p= -68610 和K≈2.0206 代入式(15)中, 可得
由此得出经过超前校正后的系统开环传递函数为
校正后的系统单位阶跃响应如图5 所示。
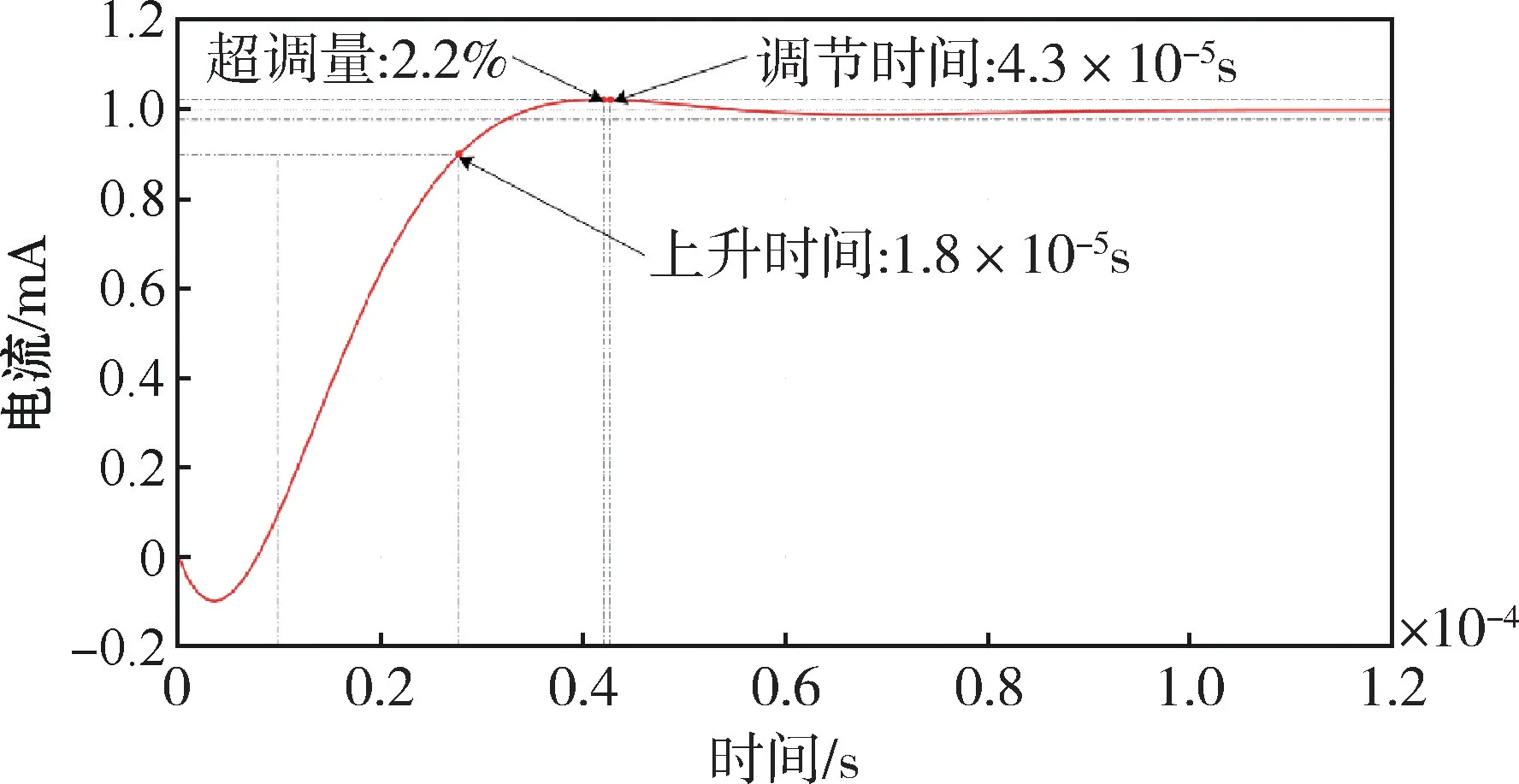
图5 校正后的系统单位阶跃响应(延迟环节一阶近似)Fig.5 Unit step response of the system after calibration(first-order approximation of delay link)
由图5 可知, 系统稳定, 稳态误差趋于0。 此时, 系统的超调量σP=2.2%, 上升时间tr=1.8 ×10-5s, 调节时间ts=4.3 ×10-5s, 动态性能指标符合期望值。
为探究延时环节的一阶近似对系统的影响,现用式(4)替换式(18)中的一阶近似, 得到系统开环传递函数, 表达式为
校正后的系统单位阶跃响应如图6 所示。
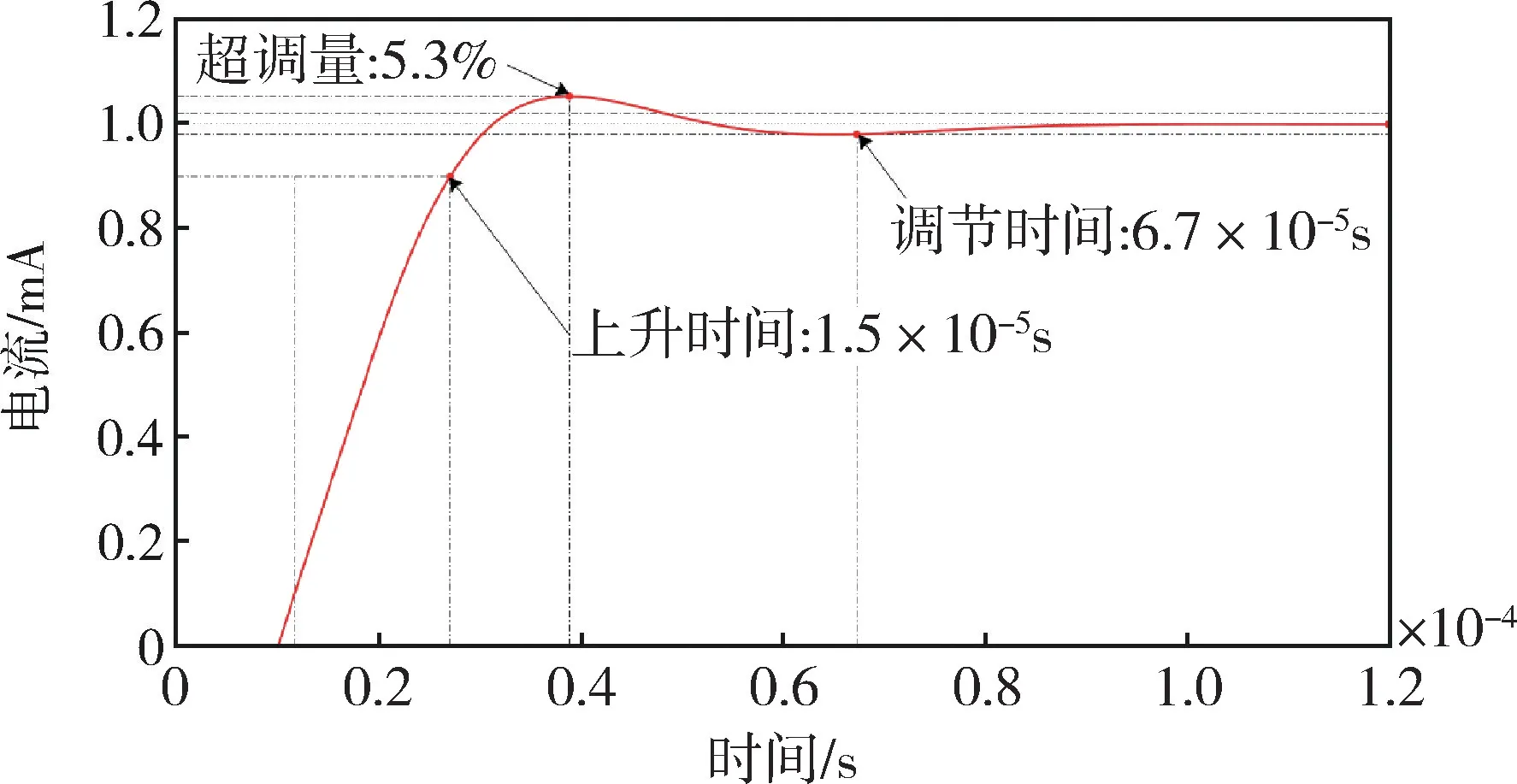
图6 校正后的系统单位阶跃响应Fig.6 Unit step response of the system after calibration
由图6 可知, 系统稳定, 稳态误差趋于0。 此时, 系统的超调量σP= 5.3%, 上升时间tr=1.5 ×10-5s, 调节时间ts=6.7 ×10-5s, 动态性能指标与期望值接近, 证明了延时环节一阶近似在本次参数求解过程中的可行性。
校正后的系统开环频率特性曲线如图7 所示,相角裕度γ=61°, 幅值裕度Kg=8.6dB, 具有较大的稳定裕度, 证明系统的鲁棒性较好。 此时, 系统-3dB 带宽为fb≈6.2kHz。

图7 校正后的系统开环频率特性曲线Fig.7 Open-loop frequency characteristic curves of the system after calibration
3.3 连续域控制器离散化
本文采用连续域-离散化设计法, 直接将连续域控制器离散化, 对式(17)进行z变换, 得到
C1(z)即为所求得的离散化PD 控制器。
4 Simulink 仿真
4.1 连续域-离散化设计法验证
将C1(z)代入离散控制系统, 如图8 所示。
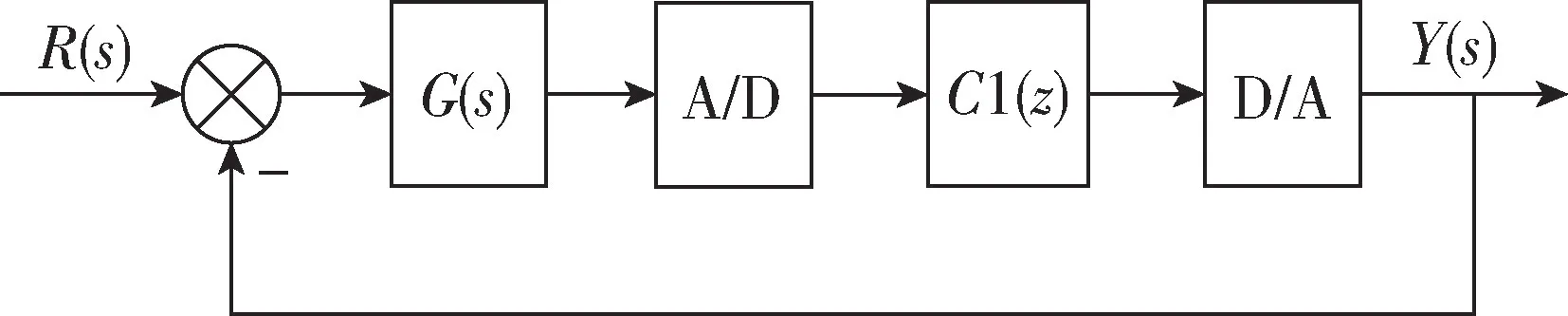
图8 离散控制系统示意图Fig.8 Diagram of discrete control system
为探究这种方法对整个系统的影响, 以Simulink 为工具, 对连续系统与离散系统进行仿真, 如图9 所示。

图9 Simulink 仿真图Fig.9 Simulation diagram of Simulink
仿真输入信号为1mA 电流的单位阶跃响应,离散域系统的A/D 采样频率为50kHz。 为了使连续域与离散域的输出误差电压信号同步, 在连续域的Simulink 仿真中加入相应的延时环节, 对比连续域与离散域的闭环系统阶跃响应曲线, 如图10所示。

图10 连续域和离散域的单位阶跃响应曲线Fig.10 Unit step response curves for continuous and discrete domains
仿真结果表明, CDC 控制系统在连续域和离散域的单位阶跃响应曲线基本一致, 证明了连续域-离散化设计法在本次实验中的可行性, 并且仿真结果为实际控制系统提供了依据。
4.2 输出稳态误差
将Simulink 仿真信号源设为1mA 的电流值,信号发生时间设置为0.0001s, 离散域稳态误差如图11 所示。

图11 离散域稳态误差Fig.11 Diagram of discrete domain steady state error
通过离散PD 控制器的调节, 离散控制系统稳定, 稳态误差为0, 实际上这与控制环路包含积分环节有关。
5 结论
本文建立了自动跟踪型电流数字转换电路的控制系统模型, 采用根轨迹法求解连续控制系统的PID 控制器参数, 校正后系统动态性能指标接近期望值, 闭环阶跃响应的超调量为σP=5.3%, 上升时间tr=1.5 ×10-5s, 调节时间ts=6.7 ×10-5s。该系统具有较大的稳定裕度, 证明系统的鲁棒性较好, 系统的-3dB 带宽约为6.2kHz。 采用连续域-离散化设计法对连续域PID 进行离散化处理,基于Simulink 分别建立了连续域与离散域的闭环系统仿真模型, 仿真结果表明两个系统的阶跃响应曲线特性基本相同。 在离散域中, 输入单位阶跃信号时, 系统稳定且输出稳态误差为0。 仿真结果可用于电流数字转换电路控制参数优化。
