双孢菇柔性仿形采摘末端执行器设计与试验
2023-03-07姬江涛李梦松赵凯旋
姬江涛 李梦松 赵凯旋 马 淏
(1.河南科技大学农业装备工程学院, 洛阳 471003;2.河南省机械装备先进制造协同创新中心, 洛阳 471003)
0 引言
双孢菇是世界性栽培和消费的菇类作物,具有生产成本低、生长周期短、经济效益高等优点,在我国种植非常普遍[1]。在日常生产中,为确保双孢菇优良的质量和完好的外观,90%以上的双孢菇都要依靠人工收获。而人工收获劳动强度高,劳动成本占总生产成本的15%~30%[2]。因此,对于实现双孢菇采摘机械化、自动化的需求十分迫切。末端执行器作为采摘机器人的核心装置[3-6],对于双孢菇的质量有至关重要的作用。
近年来,随着材料科学的快速发展,软体机械手成为国内外研究的焦点[7-9],国内外学者相继对其开展了研究。魏博等[10]设计了双连杆并联式手指,在抓握直径差异较大的柑橘时,手指能够自动进行抓取或捏取动作,并实现被动柔顺。朱银龙等[11]设计了一种内嵌传感器的四指软体机械手,建立了软体驱动器的弯曲特性和末端输出力的数学模型,可预测施加不同气压时的软体驱动器性能。刘晓敏等[12]设计了2自由度“刚-柔耦合”驱动器,施加气压后,驱动器在60°~120°范围内连续弯曲,最大弯曲角为277°,其弯曲变形类似圆弧状,与球果表面很好地贴合。以上研究成果虽具有仿形能力和低损特性,但所需作业空间较大[13-15],而菇类作物生长较密集,因此难以应用于菇类作物采摘。
针对菇类作物采摘,卢伟等[16]设计了3指4指节的柔性手爪,并进行褐菇采摘试验,结果表明,与刚性手爪相比,柔性手爪抓持力减小,为(2.4±0.3)N。HUANG等[17]提出并测试了4种双孢菇采摘方法,其中弯曲方法需要最少的采摘力和最少的采摘时间,所需的操作时间、分离角和峰值力分别为(0.9±0.5) s、13.6°±6.7°、(3.3±2.4) N。但双孢菇与褐菇相比,菇盖面积更小、作业空间也更小,因此褐菇的柔性手爪难以应用于双孢菇的采摘。而刚性采摘执行器存在结构复杂、灵活性差、适应能力差等问题[18-21],在抓取过程中容易对双孢菇表面造成破坏,难以实现无损采摘[22-24]。普通吸附类采摘执行器存在与双孢菇之间的密封性差的问题[25-27],在吸附过程中容易出现漏气的现象,从而导致双孢菇脱落。
针对上述问题,结合双孢菇的外形参数和采摘需求,本文设计一种双孢菇柔性仿形采摘末端执行器,对末端执行器进行有限元仿真和分析,制作物理样机,对末端执行器的性能指标和采摘效果进行试验验证。
1 末端执行器总体设计
1.1 双孢菇特性分析及采摘要求
双孢菇呈白色或棕色,菇盖呈半球形,下方逐渐平展,表面光滑,目前常见的双孢菇工厂化栽培生长情况如图1所示,具有以下特点:长势较为密集,成熟双孢菇通常簇拥在一起;与培养基质的连接力较小,容易脱落;质地柔软,易被损伤,损伤后略变淡黄色。

图1 双孢菇工厂化栽培生长情况Fig.1 Growth of Agaricus bisporus in factory cultivation
市场上售卖的成熟双孢菇直径为25~50 mm,其分级标准为:一级双孢菇直径为25~35 mm,二级双孢菇直径为35~50 mm。根据DB34/T 1277—2010《双孢蘑菇采收、分级和盐渍技术规程》,双孢菇采摘最佳菇盖直径为25~35 mm。由于双孢菇长势密集,长在同一区域的双孢菇成熟时间不一致、质地柔软,使双孢菇难以实现批量采摘,单体采摘仍是双孢菇采摘的主流方法。在避免双孢菇表面出现机械损伤前提下,实现对不同尺寸和椭圆度的双孢菇采摘,是双孢菇采摘末端执行器研究的关键。
1.2 末端执行器机械结构
如图2所示,设计的末端执行器对单个双孢菇的菇盖进行采摘作业,通过吸附的方式完成双孢菇的采摘。

图2 采摘方式示意图Fig.2 Schematic of picking method
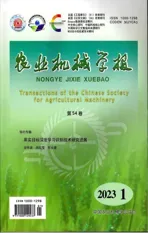
该末端执行器的机械结构由柔性仿形吸盘和金属附件组成,其机械结构三维剖视图如图3所示。
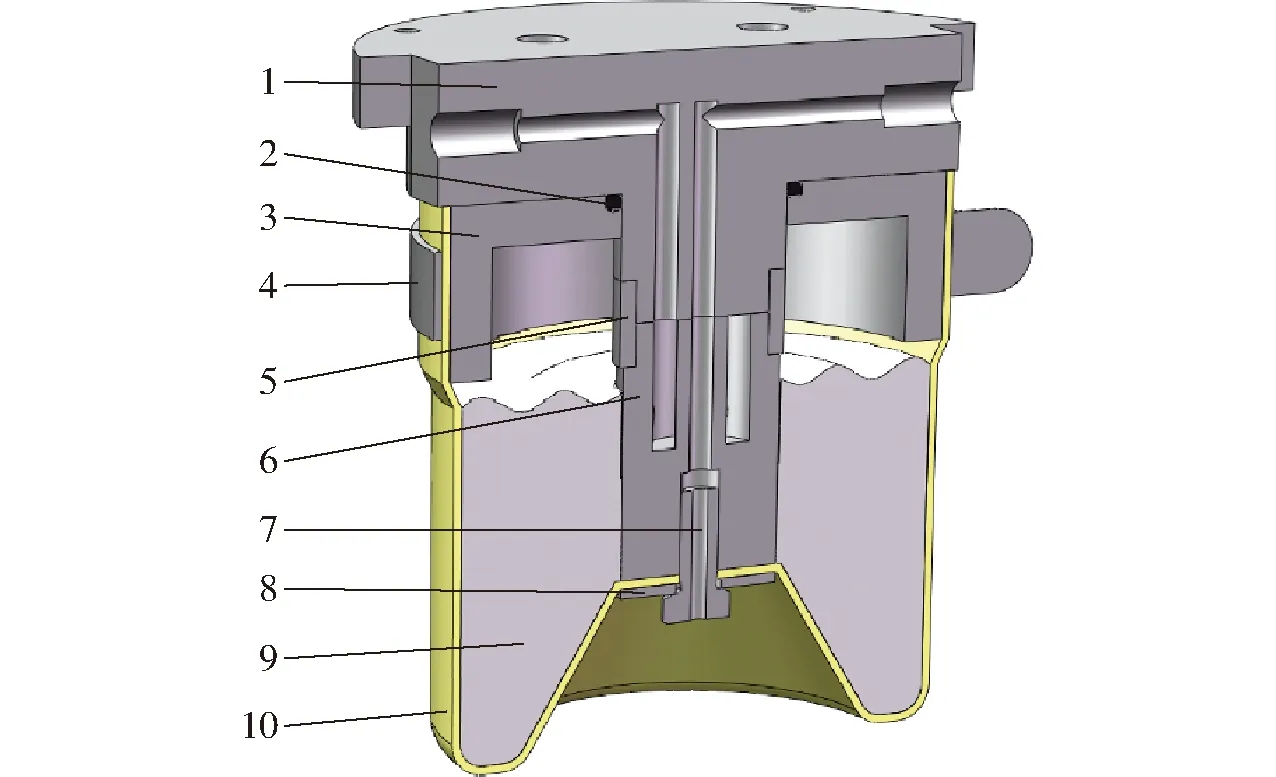
图3 机械结构剖视图Fig.3 Section view of mechanical structure1.端盖 2.密封圈 3.支撑件 4.卡箍 5.连接套 6.通气芯 7.通气螺钉 8.垫片 9.颗粒 10.柔性膜
其中柔性仿形吸盘由颗粒和柔性膜组成,附件包括端盖、支撑件、连接套、通气芯、卡箍、通气螺钉和垫片,附件的主要作用是将吸盘部分固定并向柔性仿形吸盘传输气压。端盖内设有两条通气管道,分别用于柔性膜内部的通气和吸盘的吸附。为防止颗粒泄漏,在端盖和支撑件之间设有密封圈,在通气芯的外侧设有过滤网。卡箍将柔性仿形吸盘固定在支撑件上,通气螺钉将柔性仿形吸盘的下表面固定在通气芯上。
柔性仿形吸盘的工作原理为:标准气压下,颗粒在柔性膜内具有类流体特性,当柔性膜和双孢菇表面接触后,会根据双孢菇的表面轮廓进行仿形,从而和双孢菇之间进行充分接触,使两者之间具有良好的密封性,并在密闭空腔内形成一定的负压,使后续的吸附更加稳定。
1.3 末端执行器控制原理
末端执行器控制原理如图4所示,采用气压反馈控制,能够实现力与负压的精确转换。具体工作路线为:输入吸附力后,系统能够根据公式将吸附力转换为相应的负压,此负压即为控制系统的给定负压,给定负压与气压传感器所测得的负压对比,当两者存在偏差时,调节负压调压阀,使柔性仿形吸盘与双孢菇之间的密闭空腔内的负压达到给定负压,从而完成对吸附力的调节。

图4 控制系统原理图Fig.4 Control system schematic
2 柔性仿形吸盘设计
2.1 柔性仿形吸盘结构设计
吸盘与接触物体之间的密封程度直接影响吸盘密闭空腔内外真空负压的强度,从而影响吸盘吸附力的强弱[28]。不同双孢菇的椭圆度和表面曲率不同,标准吸盘在采摘时存在与双孢菇密封程度偏低,导致抓不紧或掉落的问题。针对以上问题,设计了柔性仿形采摘末端执行器,利用柔性仿形吸盘的仿形能力和单体作业模式,能够有效降低机械损伤并且不会对周围的双孢菇造成干扰。
为了缩短作业时间,加快仿形速度,将吸盘开口形状设计为图5所示的“凹”形。结合菇盖形状试制开口角度为60°、90°、120°的吸盘,进行了预试验,使用3种开口角度的吸盘分别采摘了100个双孢菇,采摘成功率分别为92.00%、88.00%、73.00%。可知开口角度为60°时,吸盘采摘成功率最高,故将吸盘开口角度取为60°。
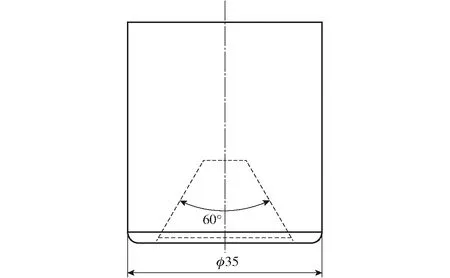
图5 吸盘结构示意图Fig.5 Structure diagram of sucker
2.2 柔性仿形吸盘尺寸确定
柔性仿形吸盘尺寸由实际作业空间和双孢菇尺寸共同决定,吸盘外径的取值应在不影响实现仿形功能的前提下尽可能小,以减小对周围双孢菇造成干扰的可能性。成熟双孢菇直径为25~50 mm,为了预留吸盘的开口直径并保证吸盘的仿形能力,取吸盘外径为35 mm。
吸盘吸力公式为
(1)
式中F1——吸盘吸力,N
A——吸附有效面积,m2
D——吸盘有效直径,m
p——相对压力,Pa
由公式(1)得知,吸盘吸力是由相对压力和吸盘有效直径共同决定的,相对压力可以通过调压阀进行控制,吸盘有效直径主要受吸盘开口直径的影响,因此,选择吸盘最佳开口直径能够使吸盘的有效直径最大化,从而使同等吸附力所需负压最低。本文将通过仿真的方式分析吸盘开口直径和吸盘有效直径之间的关系,从而确定吸盘最佳开口直径。
2.3 吸盘吸附力影响因素分析
吸盘在采摘过程中,吸盘吸附力主要与负压和直接接触面有关,其中负压影响密闭空腔内外的相对压力,而直接接触面对于吸附力的影响规律则需要结合受力分析才能得知。因此对柔性仿形吸盘吸附后的双孢菇进行受力分析。
为简化受力分析模型,将双孢菇视为呈中心轴对称的规则形状,那么双孢菇在沿中心轴切开的任意平面内的受力情况都相同,当双孢菇被吸盘吸紧且有向下运动的趋势时,任取一平面进行受力分析,双孢菇受力包括向上的吸力F1,向下的重力G,左右两侧的支反力FN1和FN2,摩擦力FS1和FS2,其受力情况如图6所示。

图6 吸附后双孢菇受力分析Fig.6 Force analysis of Agaricus bisporus after adsorption
此时吸盘的吸附力为
F=F1+(FS1+FS2)sinα
(2)
其中
(3)
式中α——重力和支反力的夹角
fS——接触面之间的摩擦因数
则吸附力为
F=F1+fS(FN1+FN2)sinα
(4)
由公式(2)~(4)可知,吸盘的吸附力由吸盘吸力和摩擦力组成,而摩擦力和吸盘吸力都与接触面相关,接触面的面积和接触面之间的摩擦因数对摩擦力有直接影响,接触面之间的密封性对吸附力有直接影响,因此选择合适的柔性膜材料对于提升吸盘的吸附力至关重要。
2.4 柔性仿形吸盘材料选取
考虑到接触面对于吸附力的重要性,对吸盘柔性膜材料进行了选择,对比了乳胶膜和硅胶膜的吸附性能,结果如表1所示,乳胶膜与硅胶膜相比,具有更高的弹力、更高的塑形能力、更高的表面硬度和更低的表面粘附性。乳胶膜更高的弹性和塑形能力使其拥有更强的仿形能力,能与双孢菇进行更充分的接触,使接触面变大,从而提高摩擦力;更高的表面硬度使其对双孢菇完成仿形后,在接触面之间产生更强的稳定性和密封性,从而提高吸附力;更低的表面粘附性使其在吸附结束后更容易与双孢菇分离。综上所述,乳胶膜更适合于双孢菇采摘,因此选择乳胶作为吸盘柔性膜材料。

表1 乳胶膜和硅胶膜性能对比Tab.1 Performance comparison of latex film and silica gel film
考虑到柔性仿形吸盘中颗粒的流动性、可压缩性、堆积密度以及获取成本,选择表面光滑的POM塑料球和两种不同直径的石英砂作为颗粒填充物(图7)。
3 柔性仿形吸盘有限元仿真
3.1 有限元仿真模型建立
本文采用ANSYS有限元软件Workbench中的Static Structural模块对柔性仿形吸盘的仿形过程和吸附过程进行有限元仿真,通过吸盘仿形过程有限元仿真确定吸盘的最佳开口直径,通过吸盘吸附过程有限元仿真得出吸盘受应力情况,为吸盘尺寸的确定及吸附性能的研究提供理论依据。
根据ANSYS Workbench工作平台有限元模型设计的特点,在SolidWorks三维建模软件中对吸盘进行三维建模,建模过程中,在不影响仿真数据的前提下,将与仿真无关的零部件删除,尽可能的简化模型以便于加快仿真速度。
在实际吸附过程中,加载位置、加载速度、接触面之间的摩擦因数等因素都会对吸盘的吸附性能和吸盘的应力产生影响。若完全考虑上述影响因素并对仿真参数分别进行设置,则会使吸盘有限元仿真分析过程十分复杂,甚至导致运算过程终止,无法完成仿真。因此,在对分析结果影响不大的前提下,对吸盘的有限元模型进行了简化,并对吸盘有限元仿真分析过程做如下假设:假设吸盘在初始位置与双孢菇处于接触状态。假设吸盘在下压过程中,作用力均匀作用在吸盘顶部表面。假设吸盘和双孢菇表面光滑平整,材料均匀连续且具有通向性。假设颗粒直径极小,填充之后为连续实体。
柔性膜材料参数:密度为1 000 kg/m3、材料常数C10为0.01 MPa、材料常数C20为0.001 MPa、不可压缩性为1.21×10-9Pa-1。由于双孢菇材料参数难以获取,因此在分析受力情况时,选择用聚乙烯材料代替。吸盘利用颗粒在柔性膜中的流动特性进行仿形,仿真的主要目的是获得应力云图,颗粒的流动轨迹不是仿真重点,为降低仿真难度,将颗粒视为连续体,其材料选择为石英。
进行吸盘仿形过程和吸附过程有限元仿真时,柔性膜和双孢菇的接触面作为主要研究对象,因此在网格划分时对柔性膜下表面及双孢菇上表面进行网格细化处理,保证计算的准确性。设定柔性膜和双孢菇网格划分类型为四面体网格类型,网格大小设置为2 mm,并对柔性膜下表面及双孢菇上表面进行网格细化处理,网格大小设置为1 mm。柔性膜下表面和双孢菇上表面之间的接触类型为不分离接触类型。选择柔性膜下表面为接触面,双孢菇上表面为目标面。Formulation算法选项设置为增广拉格朗日算法类型。
3.2 吸盘仿形过程有限元仿真
为了确定吸盘开口直径和吸盘有效直径之间的关系,选择开口直径为20、22.5、25、27.5 mm的吸盘对直径为25 mm的双孢菇进行有限元仿真。
对仿形过程进行载荷设定,在菇盖下表面添加固定支撑,在吸盘上表面均匀加载10 N作用力,模拟吸盘对双孢菇的仿形过程,载荷设置完成后,打开大变形选项,对有限元模型进行求解。
4种不同开口直径的吸盘对直径为25 mm的双孢菇的仿形过程有限元仿真应力云图如图8所示,菇盖的形状为半椭圆状,吸盘开口直径较小时,与双孢菇接触的位置处于菇盖顶部,此时吸盘的有效直径主要受到吸盘开口直径的限制。随着吸盘开口直径的增大,吸盘和双孢菇接触的位置由菇盖顶部逐渐向下,直到完全将菇盖包裹,此时吸盘的有效直径即为菇盖直径,吸盘的有效直径主要受到菇盖直径的限制。

图8 不同开口直径吸盘仿真应力云图Fig.8 Simulation stress cloud of suckers with different opening sizes
如图9所示,在ANSYS Workbench中测得开口直径为20、22.5、25、27.5 mm的吸盘对直径为25 mm的双孢菇有效直径分别为22.1、24.2、25.0、25.0 mm。结果表明:当菇盖直径一定时,随着吸盘开口直径的增大,吸盘的有效直径先逐渐增大,达到最大值之后不再变化,其最大值为菇盖直径。吸盘的有效直径在吸盘开口直径为25 mm时达到最大值,因此吸盘最佳开口直径为25 mm。
图9 吸盘有效直径变化曲线Fig.9 Variation curve of effective diameter of suction cup
3.3 吸盘吸附过程有限元仿真
在吸盘吸附过程有限元仿真中,为便于分析吸盘和双孢菇应力变化,将吸附过程分为两步,即吸盘下压过程和吸盘吸附过程,吸盘有限元载荷加载设置如图10所示。吸盘下压过程为吸盘顶部开始受到压力作用且运动到最低点与双孢菇表面进行接触的加载过程。在软件中的设置为:将菇盖下表面添加固定支撑,在吸盘顶面均匀加载10 N作用力。下压过程结束后,在吸盘容腔表面添加真空负压载荷0.07 MPa,模拟吸盘贴附过程。载荷设置完成后,打开大变形选项,对有限元模型进行求解。

图10 有限元载荷加载设置Fig.10 Finite element load setting
为更直观地研究吸盘底面各点处的应力变化,在等效应力图上,应用有限元软件探针沿吸盘直径方向依次取11个点进行Mises应力取值,并绘出吸盘Mises应力曲线。
由图11可知,柔性膜表面所受应力小于内部颗粒所受应力,原因是柔性膜材质柔软,在受到应力后会随应力方向变形,从而将应力传递给颗粒,外层的颗粒为主要的受力对象。

图11 整体应力图Fig.11 Overall stress diagram
由图12可知,吸盘在吸附过程中,吸盘和双孢菇的接触部分应力较大,吸盘中心应力相对较小,且吸盘的应力集中区域呈圆环状。吸盘有效直径为圆环外径,在采摘不同直径的双孢菇时,吸盘的有效直径会发生变化,当吸盘的有效直径达到最大值时,吸附效果最好。

图12 吸盘等效应力图Fig.12 Sucker equivalent effect diagram
由图13可知,应力由边缘位置到中心位置再到边缘位置呈类抛物线分布特点,中心位置的应力较小且较为均衡,边缘位置应力较大且相对中心位置近似对称分布,表明吸盘对椭圆度较高的双孢菇的应力分布为对称的,且吸盘表面所受应力较为集中。

图13 吸盘Mises应力曲线Fig.13 Mises stress curve of sucker
4 气动回路和控制系统设计
4.1 气动回路设计
由于双孢菇所需采摘力较小,因此选用抽气打气两用的微型真空泵,最大真空度为-70 kPa,选用最大流量为140 L/min、压力调节范围为1.3~-100 kPa的负压调压阀。气动回路如图14所示,左侧回路为吸气回路,右侧回路为卸载回路,吸气回路连接在真空泵的抽气端,卸载回路连接在真空泵的打气端。该回路与一般的真空发生器连接气路相比,结构更简单,实用性更强。同时,对气路中的电磁阀、气压表、过滤器等元件也进行了精选,保证了气路元件本身的密封要求。
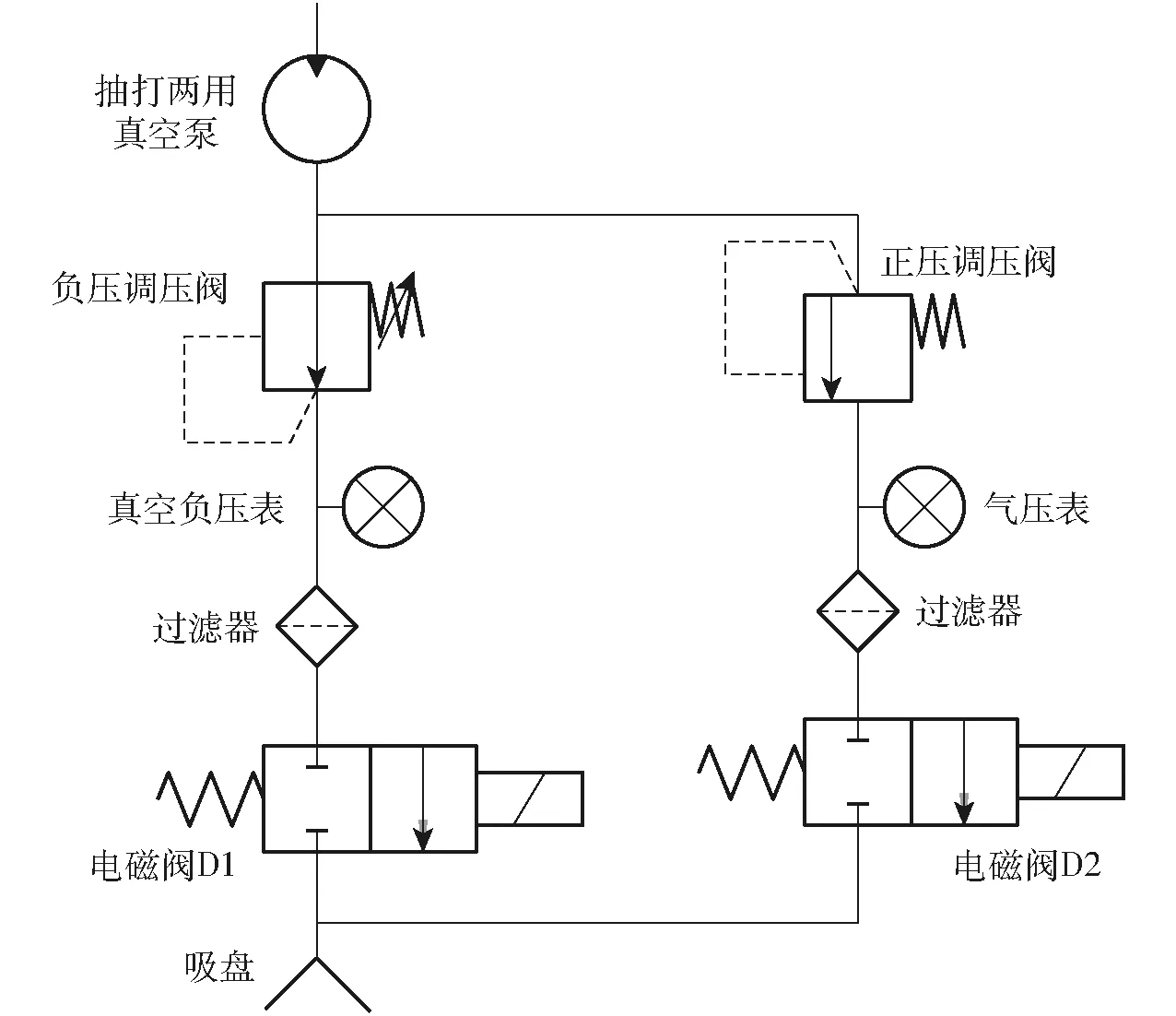
图14 气动回路Fig.14 Pneumatic circuit
气动回路的工作流程如图15所示,当吸盘到达指定位置后,电磁阀D1通电、D2断电,吸气回路连通,由真空泵产生的真空经负压调压阀调整后,传递到吸盘吸嘴处,吸盘将双孢菇进行吸附。当吸盘吸附双孢菇移动至采集筐上方时,电磁阀D2通电、D1断电,卸载回路连通,由真空泵打气端产生的正压传递到吸盘吸嘴处,双孢菇在正压作用下脱离吸盘。

图15 气动回路工作流程图Fig.15 Pneumatic circuit work flow chart
4.2 控制系统设计
末端执行器作为采摘机器人的核心装置,与采摘机器人配合完成采摘作业,基于采摘机器人的控制逻辑为该末端执行器开发了一个控制系统,如图16所示,该控制系统安装在采摘机器人上,主要由硬件控制部分和气动控制部分组成。控制系统有手动和自动两种控制模式,在采摘作业中主要使用自动模式。其工作原理为:图像采集装置将图像上传到工控机,工控机利用可视化控制软件计算出双孢菇的位置后,通过可编程逻辑控制器(PLC)发送电信号控制步进电机和气动回路执行采摘和分拣动作。PLC发送第1次电信号,步进电机执行定位程序,将吸盘移动到待采摘的双孢菇上方;当吸盘移动至双孢菇上方后,PLC发送第2次电信号,步进电机执行采摘程序,将吸盘下移使之与双孢菇接触;当吸盘与双孢菇贴合后,PLC发送第3次电信号,真空泵启动,吸气回路接通,吸盘对双孢菇进行吸附;当吸盘将双孢菇吸附后,PLC发送第4次电信号,步进电机执行分拣程序,将双孢菇移至采集筐上方;当吸盘移至采集筐上方后,PLC发送第5次电信号,单控电磁阀接通,吸嘴处产生正压,将双孢菇吹落。

图16 控制系统流程图Fig.16 Flow chart of control system
5 试验
5.1 拉脱力试验
5.1.1试验材料及方法
吸附式采摘末端执行器的性能指标为末端执行器对物体的吸附力,但吸附力难以直接测量,而吸附力与拉脱力有直接关系,因此通过测量拉脱力的方式验证末端执行器的性能。影响末端执行器性能的因素有许多种,如吸附负压、双孢菇直径、柔性膜厚度、颗粒直径,为明确这几种因素对末端执行器性能的影响,对所试制的末端执行器进行拉脱力试验。
试验使用单立柱电子拉力试验机(东日仪器有限公司)对双孢模型进行拉脱力试验,如图17所示,末端执行器通过连接件固定在拉力试验机活动端,双孢菇模型则通过夹持器固定在固定端。试验材料为树脂材料打印的双孢菇模型,直径分别为25、35、45 mm,厚度分别为0.7、0.9、1.1 mm的柔性膜;直径分别为200、20目的石英和直径为3 mm的塑料球作为颗粒填充物。

图17 试验平台Fig.17 Test platform
(1)拉脱力-柔性膜厚度关系试验
打开真空泵,使电磁阀都处于关闭状态,通过负压调压阀调节负压,待压力调节完成后,将拉力试验机活动端下移,使末端执行器与双孢菇模型接触并完成仿形,打开电磁阀D1,使末端执行器吸附双孢菇模型,完成吸附后,在PC端上运行双孢菇拉脱力测试程序,拉力试验机活动端以10 mm/min的速度上移,逐渐脱离双孢菇模型,直至移动到最高点,点击回零,拉力试验机活动端回到初始位置,在此过程中,PC端记录的最大力即为末端执行器的拉脱力。选择直径为200目的石英颗粒作为填充物,更换安装厚度为0.7、0.9、1.1 mm的柔性膜,对直径为 25 mm 的双孢菇模型进行拉脱力试验。操作拉力试验机执行双孢菇拉脱力测试程序,每个试验重复20次。
(2)拉脱力-颗粒直径关系试验
选择厚度为0.9 mm的柔性膜,更换安装颗粒直径为200、20目的石英和3 mm的塑料球,对直径为25 mm的双孢菇模型进行拉脱力试验。操作拉力试验机执行双孢菇拉脱力测试程序,每个试验重复20次。
(3)拉脱力-双孢菇直径关系试验
选择厚度为0.9 mm的柔性膜,直径为200目的石英颗粒组成柔性仿形吸盘,更换安装直径为25、35、45 mm双孢菇模型,分别在负压为-70~-10 kPa时(压力间隔为10 kPa)测出拉脱力,每个试验重复20次。
5.1.2试验结果与分析
由拉脱力与柔性膜厚度关系试验结果(图18)可以得知,柔性膜厚度与拉脱力呈非线性关系,在同一负压下,厚度为0.9 mm的柔性膜的拉脱力最大,1.1 mm次之,0.7 mm最差,表明过薄或过厚的柔性膜的吸附效果都不好。其原因是:过薄的柔性膜缺少稳定性,容易产生皱褶影响密封性,过厚的柔性膜的仿形能力不好,容易在接触面之间产生缝隙影响密封性。
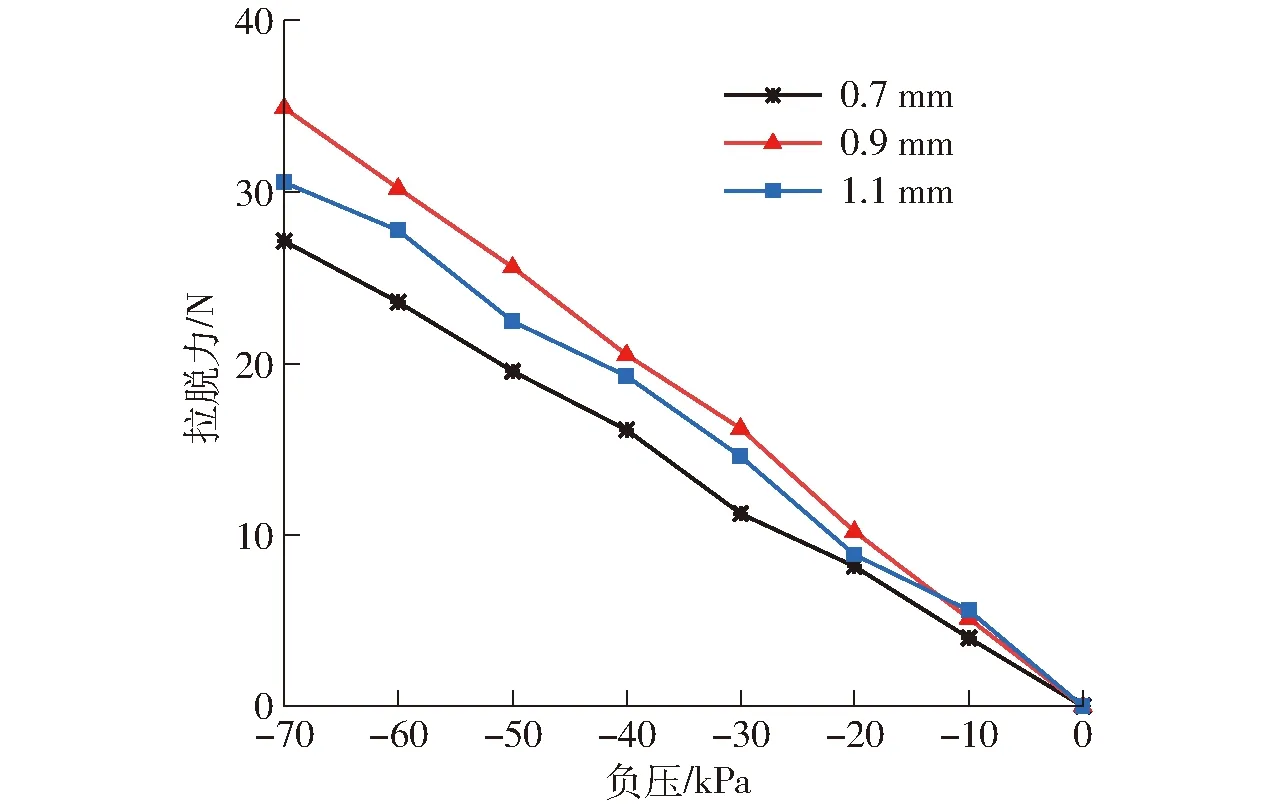
图18 拉脱力与柔性膜厚度关系曲线Fig.18 Relationship curves between pulling force and flexible film thickness
由拉脱力与颗粒直径关系试验结果(图19)可以得知,颗粒直径和拉脱力呈负相关,在同一负压下,颗粒直径为200目的细石英的拉脱力最大,直径为3 mm的塑料球次之,直径为20目的粗石英最差。其原因是:不同直径或形状的颗粒的仿形能力不同,导致与接触面之间的密封性不同,从而在相同负压下的拉脱力不同。直径为200目的细石英呈粉末状,颗粒之间缝隙最小,与双孢菇接触之后,颗粒能够根据双孢菇表面轮廓进行仿形,使接触面之间具有良好的密封性;直径为3 mm的塑料球表面光滑,形状为规则的球体,这种物理特性使塑料球之间的摩擦力较小,与双孢菇接触之后,能够快速移动,对双孢菇表面轮廓进行仿形,但由于塑料球之间的缝隙较大,导致其仿形能力弱于细石英,接触面之间的密封性也低于细石英;直径为20目的石英直径较大且形状不规则,与双孢菇接触之后,颗粒移动速度较慢,而且颗粒之间存在较大的缝隙,导致其仿形能力最弱,接触面之间的密封性也最低。

图19 拉脱力与颗粒直径关系曲线Fig.19 Relationship curves between pulling force and particle diameter
由拉脱力与双孢菇直径关系试验结果(图20)可以得知,拉脱力与双孢菇直径呈正相关,同一负压下,随着菇盖直径的增大,拉脱力也逐渐增大;拉脱力与负压呈近似线性关系,在拉脱力-负压关系曲线中,其斜率为吸附的有效面积,而斜率在每个负压间隔处都有波动,表明吸附的有效面积也发生了变化,当负压小于-40 kPa时,3条折线均出现斜率变小的现象,可能的原因:在较高负压和较大作用力下,吸盘表面发生变形导致边缘漏气,对拉脱力造成影响;吸盘的开口直径为25 mm,因此根据公式(1)计算出吸盘在各个负压下吸盘吸力的理论值,但在实际试验中,拉脱力均大于理论值,其原因是:吸盘的拉脱力与吸附力大小相等,方向相反,吸附力由吸力和摩擦力组成,因此拉脱力大于吸力理论值;负压相同时,随着菇盖直径的增大,折线的斜率也逐渐增大,表明吸附的有效面积也随着菇盖直径的增大而增大。可能的原因:吸盘对菇盖直径较大的双孢菇进行仿形后,接触面发生了变形,导致吸盘有效面积变大。

图20 拉脱力与双孢菇直径关系曲线Fig.20 Relationship curves between pulling force and diameter of Agaricus bisporus
结合3个拉脱力试验可知,吸附负压、双孢菇直径、柔性膜厚度和颗粒直径的改变均会对吸盘的性能造成影响。改变柔性膜厚度或颗粒直径会导致吸盘的仿形效果发生变化,当柔性膜厚度为9 mm、颗粒直径为20目的石英时吸盘的仿形效果最好。改变吸附负压会导致相对压力发生变化,改变菇盖直径会导致吸附的有效面积发生变化,这两种变化都会对吸盘吸附力产生直接影响。
5.1.3标准真空吸盘对比试验
目前常见吸盘为硅胶材质,本文选用图21所示的直径为25 mm的标准真空吸盘与柔性仿形吸盘(柔性膜厚度为9 mm、颗粒直径为20目)进行对比试验,分别将两个吸盘安装在拉力试验机上,对直径为25 mm双孢菇模型进行拉脱力试验,在负压为-70~-10 kPa时(压力间隔为10 kPa)测出拉脱力,每个试验重复20次。
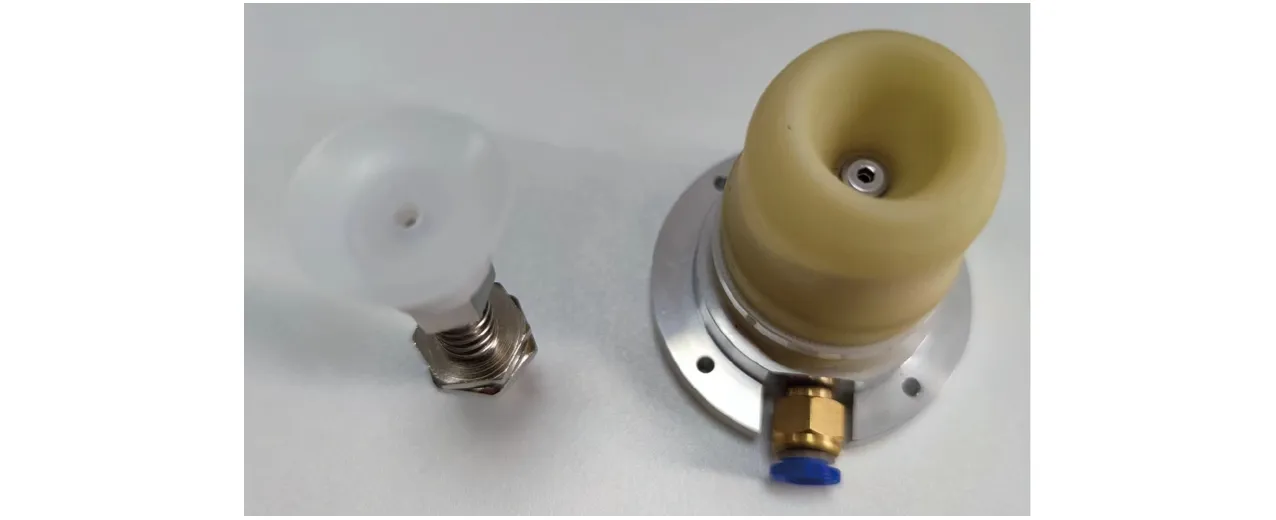
图21 两种吸盘实物Fig.21 Two kinds of sucker objects
由图22可知,在负压相同时,柔性仿形吸盘的拉脱力大于标准真空吸盘的拉脱力,并且随着真空负压的增大,标准真空吸盘拉脱力的上升趋势也逐渐减小。通过观察两种吸盘与双孢菇模型的接触情况可以发现:标准真空吸盘和双孢菇之间是平面与圆弧面之间的接触,其接触面形状为平面,接触面较小且接触面之间的密封程度较差;而柔性仿形吸盘和双孢菇之间是圆弧面与圆弧面之间的接触,其接触面形状为圆弧面,接触面较大且接触面之间的密封程度较好。随着真空负压的增大,接触面之间的密封程度对吸附力的影响会逐渐增大,使两者的差值也越来越大。
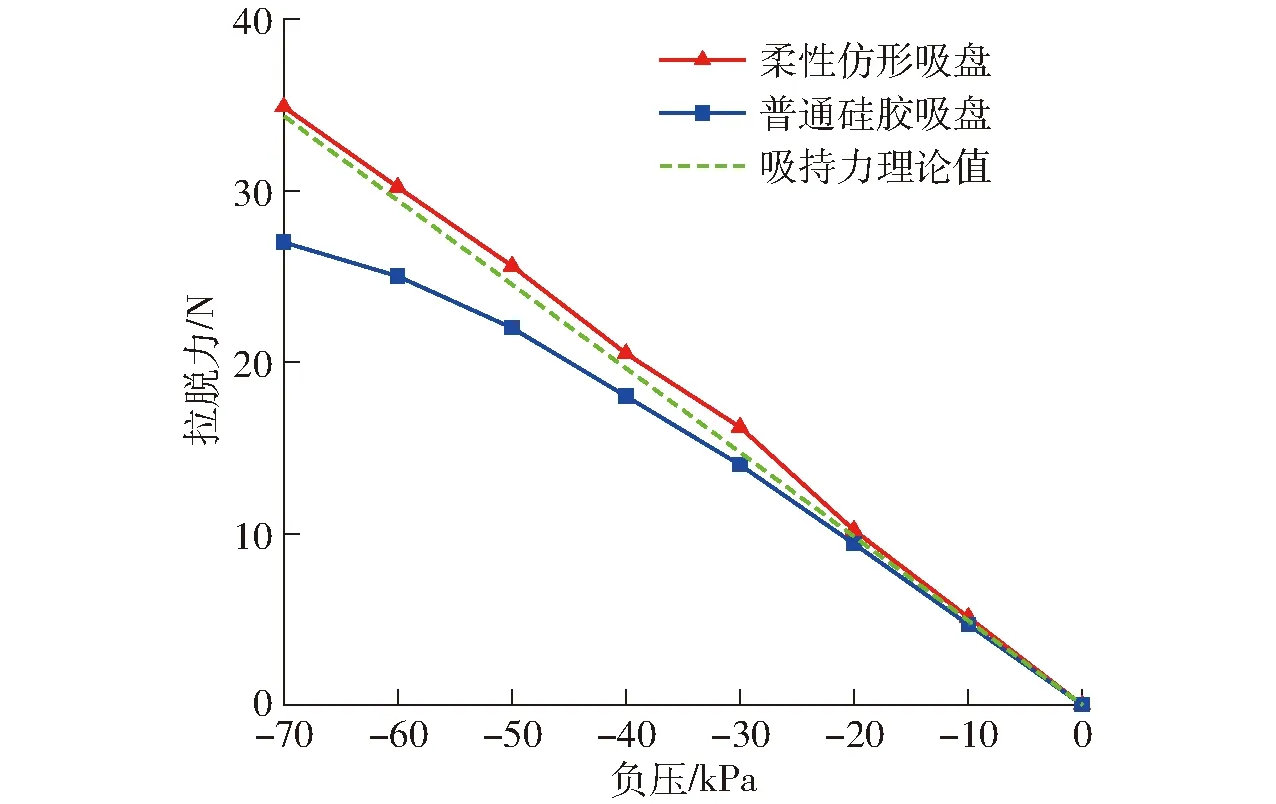
图22 两种吸盘拉脱力试验曲线Fig.22 Pulling force test curves of two suction cups
5.2 双孢菇采摘试验
为验证本文所设计的双孢菇采摘末端执行器的实际应用效果,在河南洛阳奥吉特食用菌有限公司进行了采摘试验。如图23、24所示,试验使用柔性仿形吸盘和直径为25、35、45 mm的标准真空吸盘分别对200个直径为25~50 mm的双孢菇进行采摘试验。

图23 标准真空吸盘采摘试验Fig.23 Ordinary silica gel sucker picking test

图24 柔性仿形吸盘采摘试验Fig.24 Flexible profiling sucker picking test
采摘试验结果如表2所示,柔性仿形吸盘的采摘成功率为98.5%,25、35、45 mm的标准真空吸盘的采摘成功率分别为90.5%、92.5%、86%;柔性仿形吸盘采摘的平均气压为-9.2 kPa,25、35、45 mm的标准真空吸盘采摘的平均气压为-10.3、-9.8、-11.7 kPa。试验结果表明:在采摘同一批双孢菇时,柔性仿形吸盘所需负压更低,采摘成功率更高。对采摘失败的双孢菇观察后发现,这些双孢菇形状畸形或表面存在缺陷,标准真空吸盘与这些双孢菇的接触面之间存在较大的缝隙,无法对其进行吸附,而柔性仿形吸盘在面对严重畸形或缺陷的双孢菇时,也不能够对其完成仿形,从而导致采摘的失败。
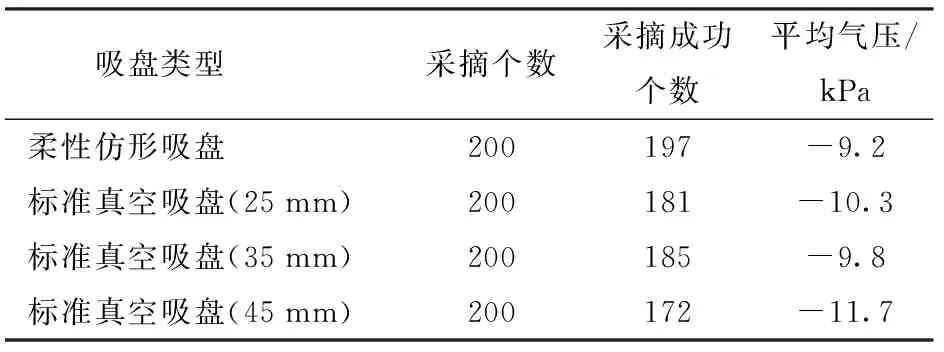
表2 采摘试验结果Tab.2 Results of picking test
采摘结束后,对人工采摘、柔性仿形吸盘采摘和标准真空吸盘采摘的双孢菇进行损伤检测。损伤检测结果如表3所示,其中人工采摘和柔性仿形吸盘采摘的双孢菇表面均没有明显损伤,极少数双孢菇表面出现轻微损伤;而标准真空吸盘采摘的部分双孢菇表面出现轻微吸痕,少数双孢菇表面出现明显吸痕。综合评定:人工采摘的采摘损伤率为1%,柔性仿形吸盘的采摘损伤率为2.5%,标准真空吸盘的采摘损伤率为20.5%。

表3 损伤检测结果Tab.3 Damage detection results
在3种方式采摘的双孢菇中,随机各取出1个样本进行记录。如图25所示,放置2 h后,人工采摘和柔性仿形吸盘采摘的双孢菇表面基本完整,没有明显受损痕迹;标准真空吸盘采摘的双孢菇表面则有一道呈圆弧状的吸痕;放置24 h后,3种方式采摘的双孢菇表面的菌丝在空气中氧化变为淡黄色,除此之外,人工采摘的和柔性仿形吸盘采摘的双孢菇表面基本没有变化,而标准真空吸盘采摘的双孢菇表面的吸痕颜色加深。

图25 样本变化情况Fig.25 Sample changes condition
通过采摘试验结果得知:柔性仿形吸盘的采摘成功率为98.5%,高于标准真空吸盘;柔性仿形吸盘采摘的平均气压为-9.2 kPa,低于标准真空吸盘;柔性仿形吸盘采摘损伤率为2.5%,低于标准真空吸盘。通过对比试验可知柔性仿形吸盘的采摘效果和控制性能均优于标准真空吸盘,且能够满足双孢菇的采摘需求。
6 结论
(1)设计了一种双孢菇柔性仿形采摘末端执行器,该末端执行器由柔性仿形吸盘和气动回路组成,通过仿形提高接触面之间的密封性,使吸附更加稳定。采用单体柔性吸附的采摘方式,不仅避免了双孢菇在自动化采摘过程中的机械损伤,也为果实无损化采摘提供了新思路。
(2)对柔性仿形吸盘进行了有限元仿真,通过吸盘仿形过程有限元仿真确定了吸盘的最佳开口直径,通过吸盘吸附过程有限元仿真得出了吸盘受应力情况,结果表明吸盘的应力集中区域呈圆环形,外层的颗粒为主要的受力对象。设计了采摘气动回路和控制系统,实现了双孢菇自动化采摘。
(3)针对末端执行器进行了拉脱力试验,结果表明拉脱力与吸附负压、双孢菇直径、颗粒直径均呈线性关系,与柔性膜厚度呈非线性关系。当末端执行器中柔性膜厚度为9 mm、颗粒直径为20目的石英时仿形效果最好,并与标准真空吸盘开展了对比试验,试验结果表明同等吸附力柔性仿形吸盘所需负压更低。针对尺寸范围为25~50 mm的双孢菇进行了采摘试验,柔性仿形吸盘的采摘成功率为98.5%,并对采后双孢菇进行了损伤检测,柔性仿形采摘末端执行器的采摘损伤率为2.5%。结果表明,所设计的柔性仿形采摘末端执行器具备适应性强、抓取稳定、损伤率低等优点,能够满足双孢菇自动化采摘需求。