基于PLC的某靶弹发射车调平系统设计
2023-02-28王天辉付京来罗晨
王天辉,付京来,罗晨
(1.中国人民解放军91851部队,辽宁葫芦岛 125000;2.郑州机电工程研究所,河南郑州 450015)
0 前言
靶弹作为模拟敌方来袭的反舰导弹,为保证安全,对其飞行精度往往要求较高。某靶弹发射车通过换装不同适配支架,能够实现多类型靶弹发射,为靶弹的飞行提供发射平台和初始指向。为保障靶弹指向精度,对发射车的调平精度也提出了较高的要求,为满足靶弹的发射需求,本文作者设计一种基于PLC的靶弹发射车液压调平系统。
发射车支撑可采用支腿单独承载(轮胎离地),或轮胎与支腿共同承载(轮胎不离地)或轮胎单独承载等3种方式[1]。因靶弹发射瞬间冲击载荷较大,此设计采用支腿单独承载(轮胎离地)方式,以减少靶弹发射瞬间和发射车平台的姿态变化。
1 系统指标、组成及工作原理
1.1 系统的调平指标
根据某发射车的使用环境要求,该发射车能够在坡度不大于3°的路面进行调平。调平后,该发射车的前后和左右水平度要小于3′。当发射车停留的坡度大于3°时,发射车能够报警,并提示驾驶员进行调整位置或对地面进行平整。系统调平时间小于3 min,系统调平后精度保持时间不小于4 h。
1.2 系统的组成
调平系统由支撑调平机构和调平控制系统组成。支撑调平机构为调平系统的执行机构,包括4个调平支腿、横展机构、平伸油缸等。调平控制系统采用成熟的PLC控制,主要由PLC、液压泵站、阀组、管路、倾角传感器等组成。在调平控制系统控制下可实现发射车的自动调平[2-3],保证载车平台的姿态满足靶弹发射所需的基准角度。4个调平支腿分别安装在车底盘前和后部,横展机构(含油缸)装载在底盘上,用于增大调平支腿的横向跨距,提高发射平台的稳定性。调平控制系统在PLC的控制下工作,倾角传感器测量载车底盘水平角发送给PLC,PLC按照调平控制程序调节液压阀开关时间,实现发射车的自动调平[4]。其整体结构如图1所示。
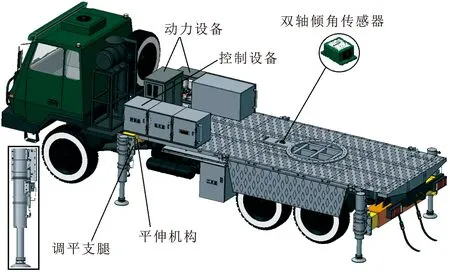
图1 某发射车整体结构Fig.1 General structure of the launch vehicle
2 系统的工作原理及控制策略
2.1 系统的工作原理
此系统采用“横展+同步举升+调平”的控制策略。横展是增大发射车支撑的横向跨距;同步举升是4个调平液压支腿同步伸出,使发射车的轮胎能够离地。横展的执行机构为4个展收液压缸,同步举升和调平执行机构是4个调平支腿。此系统的调平控制系统设计框图如图2所示。

图2 调平控制系统设计Fig.2 Design of the leveling control system
压力传感器将支腿的压力实时传递给PLC并显示在人机界面上,作为虚腿的判断条件。双轴倾角传感器将发射车横向和纵向的倾角实时传送至PLC并显示在人机界面上,PLC根据预先设定的调平程序输出控制信号,控制电磁阀相应地开启或关闭,调平支腿就会在油泵液压动力和车身重力的作用下,产生向上或向下的运动。当误差信号达到指定的误差范围时,PLC发出停止命令,调平结束后保持此平衡稳定的状态。
2.2 横展及举升的控制策略
发射车的横展动作采用行程开关控制,当PLC收到4个行程开关发出的横展到位后,停止横展伸出。
同步举升的目的主要是发射车4个轮胎离地,并保障在调平过程中,不发生轮胎触地现象,因此同步举升距离要考虑发射车前后悬挂长度。发射车上坡状态示意如图3所示。支腿离地距离为L1,前悬挂伸出量为L2,后悬挂伸出量为L3,该发射车L2>L3,前支腿距离前轮中心距离为L4,地面倾角为α。同步举升距离L=L1+L2+L4·sinα,支腿伸出速度为v,则同步举升时间t=L/v。同理可求得下坡路情况下的同步举升时间。
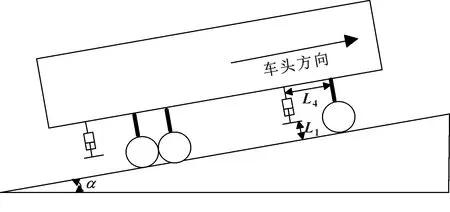
图3 发射车上坡状态示意Fig.3 Schematic of the launch vehicle uphill state
2.3 调平控制策略
常用的调平方法有:逐高法(只升不降,向最高点看齐)、逐低法(只降不升,向最低点看齐)、中心不动法(向中间点靠拢)[5-6]。此系统为防止在调平过程中产生虚腿,采用逐高法来实现发射车调平。
建立调平数学模型如图4所示,水平面坐标系为OX0Y0Z0,与车体固联的平台坐标系为OX1Y1Z1,两坐标系的X轴和Y轴的夹角为双倾角传感器输出的角度值。发射车调平的目标是平台坐标平面X1OY1与水平坐标系平面X0OY0重合,即夹角α和β为0。根据两坐标系的夹角符号,可找到最高支脚,其判别法则如表1所示。

图4 发射车调平的数学模型Fig.4 Leveling mathematical model of the launch vehicle

表1 最高点判别法则Tab.1 Rule of the highest point
由于夹角α和β的值比较小,可采用坐标系间坐标变换理论来求解各支腿的行程[7]。由平台坐标系OX1Y1Z1向水平面坐标系OX0Y0Z0变换,先绕Y轴旋转α角,其变换矩阵[8]为
(1)
保持α不变,绕X轴旋转β角,其转换矩阵为
(2)
由于发射车平台绕Z轴的旋转角γ小到可以忽略不计[9],因此坐标系OX1Y1Z1向坐标系OX0Y0Z0的变换矩阵R=R2·R1为

(3)

(4)
以表1中序号1情况为例,支点3为最高点,则各支腿升高距离为:e1=Lsinα+Wcosαsinβ、e2=Wsinβ、e3=0、e4=Lcosβsinα,各支腿的总上升时间t=e/v。支腿的上升速度由液压的流量控制,当液压流量一定时,可通过控制各支腿液压阀的开通时间来控制支腿的上升距离。
3 调平系统设计
3.1 硬件设计
液压系统主要由液压油箱、电机泵组、手动泵、操作阀箱(含调压阀组、换向阀阀组)、调平速度切换装置、支腿调平液压缸、支腿横展液压缸等组成。支腿横展液压缸主要完成横展运动,支腿调平液压缸主要完成支腿的举升和调平,调平速度切换装置主要完成调平油缸快慢速切换功能。在支腿横展、举升、倾角大于20′和撤收过程中都采用快速模式,当倾角在20′之内采用慢速模式。支腿调平油缸为双作用液压油缸,油缸上集成液控单向阀和平衡阀,能实现液压锁定,并具备因过载或油管爆裂时油缸位置锁定功能[10]。
3.2 软件设计
液压系统工作过程可分为展开和撤收两部分,展开工作流程为:启动电机泵组→系统建压→调平支腿展收油缸伸出→支腿调平油缸快速伸出→支腿调平油缸调平→系统卸荷、关机。系统工作流程如图5所示。撤收工作流程为:启动电机泵组→系统建压→支腿调平油缸快速收回→调平支腿展收油缸收回→系统卸荷、关机。
系统将压力传感器的值作为判断虚腿的条件:当同步举升时间到时,压力值小于设定值时,认为液压支腿存在虚腿现象,继续同步举升动作,直至压力值大于设定值。在调平过程中,采用逐高法能有效避免在调平过程中产生虚腿[11]。系统在调平过程中,先采用粗调平流程,此时,倾角大于20′,PLC根据双轴倾角传感器的数据,采用逐高法,计算各个支腿的运动时间,控制支腿快速伸出。当双轴倾角均小于20′,采用精调平流程,降低支腿运动速度,减少发射车在调平过程的超调和振动[12]。当双轴倾角均小于3′时,调平结束。
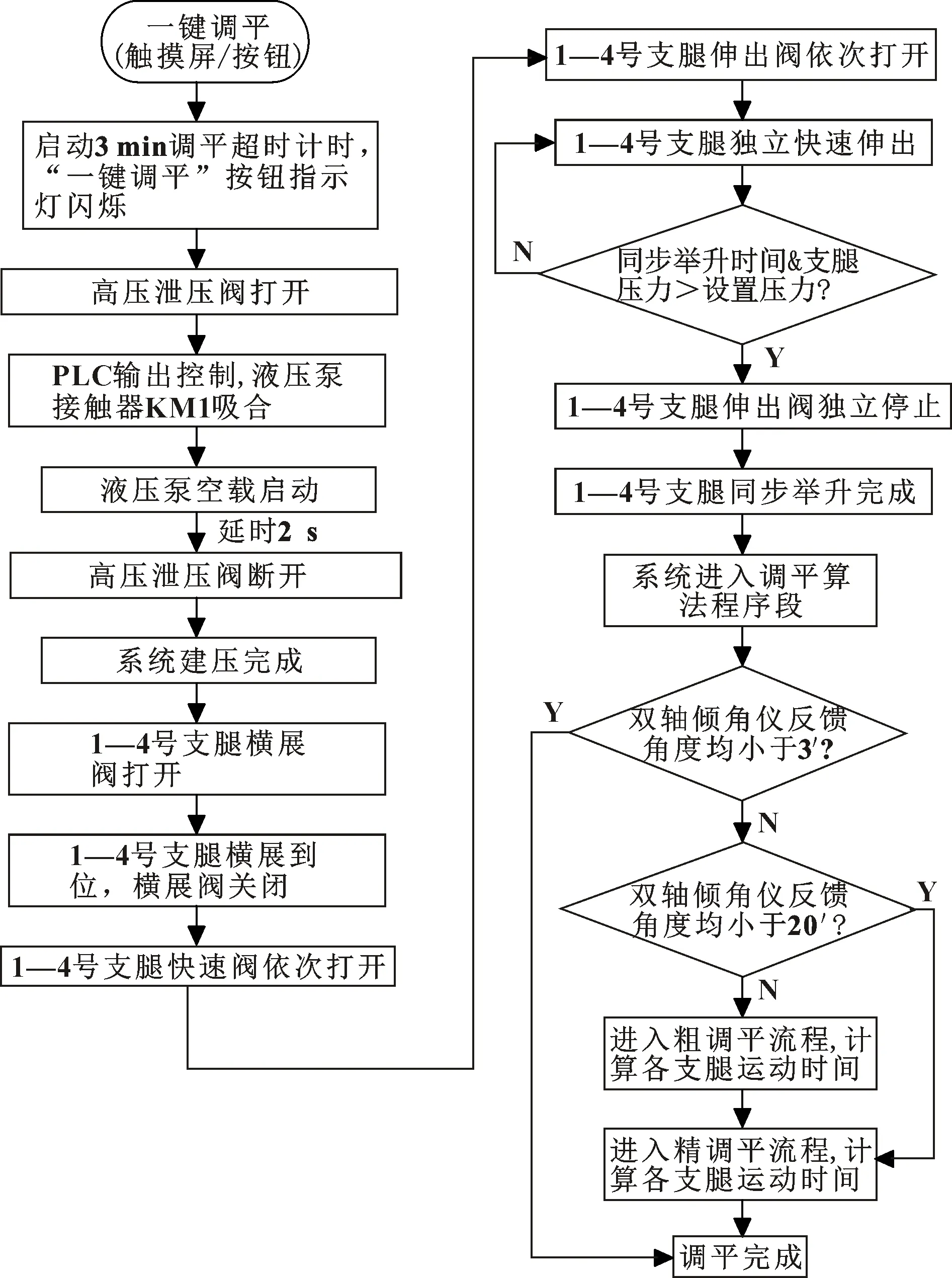
图5 液压系统工作流程Fig.5 Work flow of the hydraulic system
4 试验验证
为检验发射车调平的控制精度和稳定性,将发射车停在具有一定坡度的地面,倾角传感器显示X轴方向初始角度为2.86°,Y轴方向初始角度为1.67°。利用远程监控软件对发射车调平过程中的倾角变化进行记录如图6所示。

图6 调平过程中双轴倾角输出Fig.6 The dual-inclination output in the leveling process
由图6可以看出:发射车支腿横展和同步举升用时为65 s,调平结束X轴方向的夹角α为2.63′,Y轴方向的夹角β为1.78′,均满足指标(不大于3′)要求,调平时间为163 s,满足调平时间的指标要求。调平后保持4 h,X轴方向的夹角α变为2.76′,Y轴方向的夹角β为1.63′,满足调平保持时间要求。
5 结束语
文中针对靶弹发射的使用要求和指标要求,设计某靶弹发射车调平系统。该系统采用扩大横展和同步举升的方法,有效提高了发射车的稳定性和抗发射冲击的能力。通过将压力、倾角作为控制的双重反馈量和采用逐高法的调平控制策略,避免了虚腿现象的出现。在调平过程中,采用粗调平和精调平2种调平流程,提高了调平的效率,减小了发射车的调平超调和振动,通过实际试验验证了发射车满足设计指标要求。
