基于数据驱动的水下滑翔机生物污损监测方法
2023-02-25王延辉张新海闫彩清杨绍琼
王延辉,张新海,杨 明,闫彩清,杨绍琼, 3
基于数据驱动的水下滑翔机生物污损监测方法
王延辉1, 2,张新海1,杨 明1,闫彩清1,杨绍琼1, 2, 3
(1. 天津大学机械工程学院,天津 300350;2. 青岛海洋科学与技术试点国家实验室海洋观测与探测联合实验室,青岛 266237;3. 天津大学青岛海洋技术研究院,青岛 266237)
以我国自主研发的“海燕-L”水下滑翔机为研究对象,针对其长时间运行过程中出现的生物污损问题,提出了一种基于数据驱动的水下滑翔机生物污损监测方法,以指导试验过程中控制参数制定与任务规划.首先,通过动力学模型仿真分析,研究了生物污损对水下滑翔机单剖面运行时间的影响.然后,根据动力学分析结果,结合岸基操控条件以及水下滑翔机的通信方式,提出了一种生物污损监测方法:基于机器学习方法,利用水下滑翔机未发生生物污损时的关键数据,建立单剖面运行时间预测模型;对试验过程中水下滑翔机的单剖面运行时间进行预测,并监测其预测偏差;利用所建立的阻力系数与预测偏差的关系式,预测生物污损引起的阻力变化.最后,通过海上试验验证了所提出方法的正确性与有效性.试验结果显示,单剖面运行时间预测偏差与阻力系数均可以反映水下滑翔机的生物污损程度.当水下滑翔机正常运行时,所提出的方法对其阻力系数的最大预测误差仅为2%,可以实现对生物污损程度的准确监测.该方法只需要使用水下滑翔机运行过程中的部分关键数据,即可快速获取其性能变化,极大提高了监测效率,可以为“海燕-L”的实际海上应用提供支持.同时,该方法也可以为其他类型水下滑翔机的性能监测提供参考.
水下滑翔机;生物污损;状态监测;数据驱动方法
海洋环境观测与海洋资源开发是国家“海洋强国”战略的重要内容,水下滑翔机是相关海洋装备体系中的重要组成部分.水下滑翔机是一种依靠浮力驱动的自主水下航行器[1],可通过搭载不同任务传感器测量海洋的物理、化学、生物等特性[2-3],完成长时序、大范围的海洋环境数据采集[4].然而,水下滑翔机工作时间长、运动缓慢的特性可能导致严重的生物污损问题.随着电池技术、低功耗技术和海洋能源俘获技术的进步,水下滑翔机的续航能力不断提升,生物污损逐渐成为制约其性能的主要因素之一[5].水下滑翔机的控制参数制定[6]与长期任务规划[7]都需要准确获取其生物污损程度,因此,如何准确监测水下滑翔机在海上运行过程中的性能变化,成为迫切需要解决的关键问题.
生物污损是指海洋生物在水下设施表面附着和生长的现象[8].海洋环境独特的生物多样性导致了生物污损是不可避免的.在长时序海洋观测任务中,许多水下滑翔机都受到了生物污损的影响.Spray水下滑翔机在所罗门海[9]、菲律宾吕宋岛[10]及加拉帕戈斯群岛[11]执行海洋观测任务时均被大量藤壶附着,航行阻力不断增加.受生物污损的影响,Seaglider 516与Seaglider 616水下滑翔机的航行阻力在其任务后期急剧增加[12].我国“海燕-L”水下滑翔机在南海试验过程中被水螅类生物附着,单剖面运行时间不断增加[6].Slocum RU29水下滑翔机在执行环游大西洋任务时被具有负浮力的飞鱼卵附着,所受阻力与净浮力均发生了改变.Slocum RU27水下滑翔机在运行4个月后,其航向保持能力不断下降,最终,其操纵能力完全丧失,无法正常运行[5].
水下滑翔机生物污损的程度依赖于试验海区的地理位置、海水温度和水下滑翔机的航行速度、任务持续时间等因素,具有不确定性.由于在试验中岸基操控中心不能直接获得水下滑翔机的生物污损程度,因此,有必要开发状态监测方法以获取其在海上运行过程中的性能变化.
状态监测方法可以分为基于信号处理的方法、基于模型的方法和数据驱动方法[13].在当前研究中,通常使用基于模型参数辨识的方法获得水下滑翔机的运行状态.Eriksen等[14]对Seaglider水下滑翔机100个剖面的航行数据进行了回归分析,通过采用垂直速度的实测值与模型预测值之间的误差最小化的方法,确定了其升力系数和阻力系数.Merckelbach等[15]、Frajka-Williams等[16]采用与Eriksen等[14]相似方法,通过参数辨识得到了水下滑翔机稳态滑翔运动的模型参数.Graver等[17]利用模型参数辨识方法匹配Slocum水下滑翔机的试验数据,得到了相关水动力系数.牛文栋等[18]采用与Graver等[17]相似方法,获得了混合驱动水下滑翔机的水动力系数,并验证了该方法的正确性.Williams等[19]通过迭代方法估计了Slocum的水动力系数,并利用水动力模型预测Slocum的性能.Wang等[6]采用内罚函数法优化了水下滑翔机动力学模型中的关键参数,分析了生物污损对水下滑翔机航程的影响.Todd等[11]通过集成声学多普勒流速剖面仪(acoustic Doppler current profilers,ADCP)推断Spray水下滑翔机航行特性,解释了试验过程中生物污损对其运动参数的影响. Ma等[20]与Merckelbach等[21]通过集成电磁速度传感器(electromagnetic velocity sensor,EVS)优化了水下滑翔机的水动力参数,更准确地表达了其动力学特性.
虽然上述参数辨识方法可以获得水下滑翔机动力学模型中的阻力系数、净浮力偏移量等参数,进而用于其生物污损监测,但存在如下局限性.
(1) 参数辨识结果对水下滑翔机运行数据的完整性比较敏感[7].例如,在不同任务中,水下滑翔机搭载的温盐深(conductivity-temperature-depth,CTD)传感器的开启时段不同.当CTD传感器采样间隔过大时,会导致可用数据点不足的问题.为了降低能耗,水下滑翔机部分剖面中CTD传感器仅在下潜或上浮阶段开启,当获取的运行数据不完整时,辨识结果会出现较大误差.
(2) 传输参数辨识所用数据耗时长.当进入水面通信阶段时,水下滑翔机通过卫星与岸基操控中心传输参数辨识所需数据.但由于水下滑翔机在运行过程中记录的数据量较大,数据传输耗时较久,这增加了能源消耗并延长了任务时间.此外,长时间在水面停留也会加剧水下滑翔机的生物污损程度.
(3) ADCP、EVS等传感器会增加水下滑翔机的能耗与成本,仅在有限海洋观测任务中使用.因此,基于多传感器信息的模型参数辨识方法广泛应用受限.
为了满足水下滑翔机岸基操控的实时性要求,同时降低对其运行数据完整性的要求,本文提出了基于关键数据驱动的水下滑翔机生物污损监测方法.首先,利用水下滑翔机动力学模型进行了仿真分析,分别研究了阻力变化和净浮力变化对水下滑翔机单剖面运行时间的影响.其次,基于其动力学分析结果,结合岸基操控条件以及水下滑翔机的通信方式,提出了以单剖面运行时间预测偏差为监测指标的生物污损监测方法.然后,详细分析了水下滑翔机单剖面运行时间预测模型的构建过程,以及阻力修正系数与单剖面运行时间预测偏差的关系式的建立过程.最后,通过海上试验验证了所提出方法的正确性与有效性.
1 水下滑翔机生物污损监测方法
1.1 研究对象
本文的研究对象为我国自主研发的“海燕-L”水下滑翔机,其系统组成及关键部件如图1所示,其主要特征参数如表1所示.在执行海洋观测与探测任务时,“海燕-L”进行连续的剖面运动,每个剖面为一个运动周期.以单个剖面为例,“海燕-L”的常规运动流程[22]如图2所示.
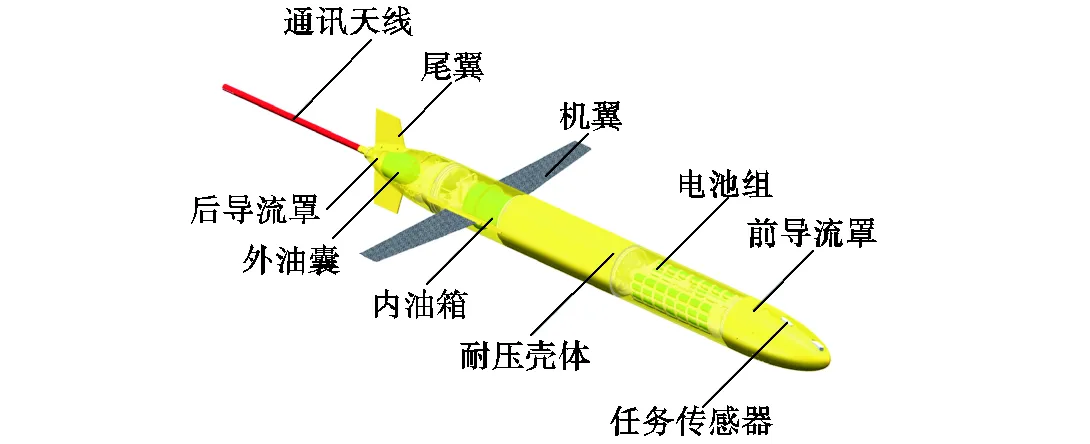
图1 “海燕-L”系统组成及关键部件
表1 “海燕-L”主要特征参数

Tab.1 Main characteristic parameters of Petrel-L

图2 “海燕-L”常规运动流程
在水面通讯阶段,“海燕-L”通过卫星与岸基操控中心传输上一剖面的关键数据信息.关键数据信息包括最大工作深度max、下潜阶段平均俯仰角down、上浮阶段平均俯仰角up、单剖面运行时间all等.由于关键数据信息较少,传输时间基本可以忽略.
1.2 生物污损对单剖面运行时间的影响
生物污损对水下滑翔机的直接影响为增大表面粗糙度、改变水动力外形,这会引起其航行阻力显著增大.当污损生物的密度与海水密度不同时,水下滑翔机所受净浮力也会发生改变.本文用阻力修正系数ΔD0表示生物污损引起的阻力系数变化量,用净浮力修正系量Δ表示生物污损引起的净浮力变化量.为了研究ΔD0与Δ对水下滑翔机运行时间的影响,利用水下滑翔机动力学模型[22]进行了对比仿真试验.当水下滑翔机的最大工作深度为1000m时,单剖面运动仿真结果如图3与图4所示.
上述仿真结果表明,阻力系数的增大使水下滑翔机在下潜阶段和上浮阶段的时间同时增长,从而导致单剖面运行时间all显著增长.当Δk0=0.3时,单剖面运行时间all增加了32%.而由于净浮力偏移量Δ的变化对下潜阶段和上浮阶段的影响相反,导致单剖面运行时间all变化不大.因此,单剖面运行时间all的变化集中反映了水下滑翔机的阻力变化.

图3 DkD0对单剖面运行时间的影响
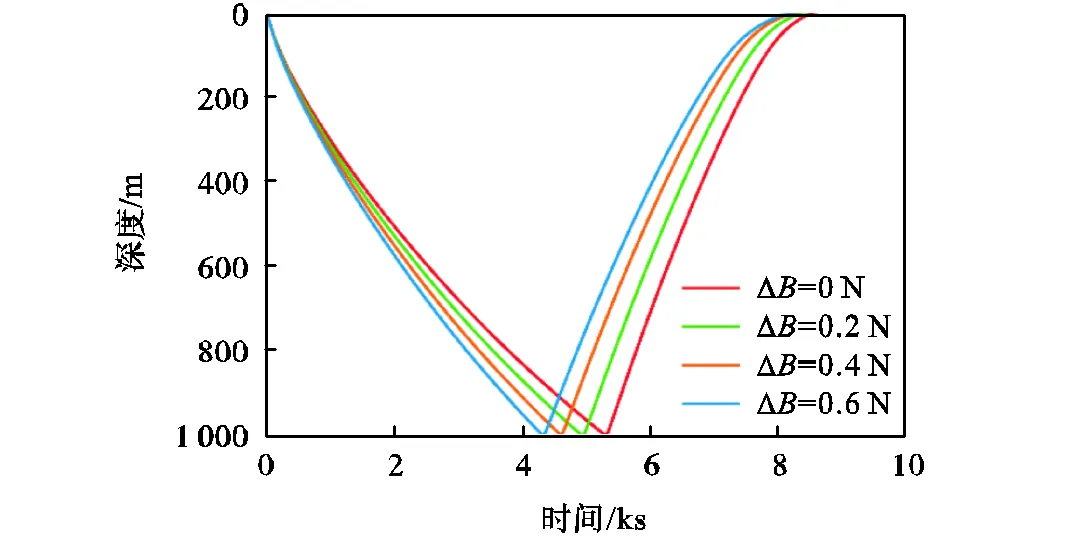
图4 ΔB对单剖面运行时间的影响
1.3 生物污损监测方法
一般地,水下滑翔机运行过程中的阻力增加由生物污损导致.因此,通过监测all的变化可以实现对生物污损程度的监测.但是,all同时也受关键数据信息中max、down、up的影响.为了准确反映生物污损的程度,需要从all中剔除max、down、up的影响.根据实践经验和统计数据分析结果,水下滑翔机在试验前期(约前100个剖面)的性能不会发生退化.因此,可将水下滑翔机前100个剖面的数据视为健康数据,用于建立all与max、down、up的关系.
综合以上分析,本文提出了基于上述关键数据驱动的水下滑翔机生物污损监测方法.监测方法的流程如下.
(1) 建立all预测模型.利用卫星通信获取水下滑翔机在未发生生物污损时(试验前期)每个剖面的关键数据信息,通过机器学习方法构建all与max、down、up的数据驱动模型.
(2) 监测生物污损程度.利用所建立的预测模型对试验过程中每个剖面的all进行预测,获得单剖面运行时间预测偏差Δ.Δ为本方法的监测指标,其大小反映了水下滑翔机的阻力变化.通过监测Δ的大小可以获得水下滑翔机的生物污损程度.
(3) 预测阻力修正系数.利用历史试验数据建立ΔD0与Δ的关系式,通过该关系式预测新的试验过程中ΔD0的大小,用于水下滑翔机性能分析并指导控制参数制定与任务规划.
整体上,本文提出的监测方法选择单剖面运行时间预测偏差Δ作为监测指标,可抵消Δ、max、down、up等参数对水下滑翔机运动的影响,集中反映了其阻力变化,增加了监测精度.
当监测到水下滑翔机发生生物污损时,可以根据污损程度,通过调整控制参数[6]提升水下滑翔机的航行效率.同时,为了避免试验任务失败,应根据监测结果对水下滑翔机的能耗进行评估,并重新规划试验任务.当监测到水下滑翔机发生严重的生物污损时,应及时对其进行回收,并清除污损生物,以避免设备丢失的风险.
2 单剖面运行时间预测模型
与物理模型相比,在存在足够先验数据的情况下,数据驱动模型的准确性显著提高[23].因此,本节通过机器学习方法构建all与max、down、up的数据驱动模型.
2.1 机器学习算法
为了构建准确的单剖面运行时间预测模型,本节讨论两种常用的机器学习回归算法:支持向量机(support vector machine,SVM)与随机森林(random forest,RF).
SVM由Vapnik等[24]于1995年提出,是一种以结构风险最小化原则为基础的机器学习方法.SVM算法具有较强的小样本适应能力,可以有效处理非线性分类和回归问题.设定一组样本集,假设样本的 输入x和输出y呈线性函数关系,则回归函数()[24]为
式中:T为x的权重系数向量;为对x赋予权重乘积后所发生的偏置数;为输出变量.式(1)可转化为二次规划的优化问题,即




RF由Breiman[25]于2001年提出,是一种基于决策树的集成学习算法.RF广泛用于预测和特征选择等问题,具有训练速度快、泛化能力强等优点.
2.2 超参数优化方法
超参数是指在机器学习算法开始训练之前人为设置的参数,如惩罚系数、核函数参数、决策树颗数等.超参数极大地影响模型的性能,由于无法先验地获得模型的最佳超参数,因此需要采用优化程序来确定.常见的超参数优化方法有网格搜索(grid search,GS)、随机搜索(random search,RS)与贝叶斯优化(Bayesian optimization,BO)等.
GS是一种遍历超参数空间的穷举搜索方法.由于参数组合数量庞大,该方法会带来巨大的计算成 本[26]. RS在超参数空间内随机采样,搜索速度有较大提升[27].与GS相比,在给定采样次数的情况下RS通常会产生更准确的结果.BO通过先验知识逼近未知函数的后验分布从而调节超参数,是一种有效的全局优化算法[28].考虑到岸基操控的实时性监测要求,本文分别评估了随机搜索(RS)与贝叶斯优化(BO)方法的超参数优化性能.
由于可用的训练数据量较少,所有优化模型都使用10折交叉验证方法进行训练,以最大化数据使用效率并确保良好的泛化能力.
2.3 预测模型评价指标
为了比较不同预测模型的性能,选取平均绝对误差(MAE)、平均绝对百分比误差(MAPE)和均方根误差(RMSE)作为模型的评价指标,计算公式如下.
1) 平均绝对误差(MAE)
2) 平均绝对百分比误差(MAPE)

3) 均方根误差(RMSE)

2.4 单剖面运行时间预测流程
将不同机器学习算法与不同超参数优化方法组合,共得到6个水下滑翔机单剖面运行时间预测模型:SVM、RS-SVM、BO-SVM、RF、RS-RF和BO-RF.预测模型的输入是水下滑翔机关键数据信息中max、down、up,输出是其单剖面运行时间all.预测流程如下.
(1) 利用卫星通信获取水下滑翔机在未发生生物污损时(试验前期)每个剖面的关键数据信息(all、max、down和up).
(2) 将数据以7∶3的比例划分为训练集和测试集,其中训练集用于训练预测模型,测试集用于评估预测模型的性能.
(3) 在模型训练前,对数据进行标准化处理,即

(4) 对不同预测模型进行训练,根据式(5)~式(7)综合评估各预测模型的性能,选择预测精度最高的模型作为最终的all预测模型.
3 试验分析
本节对历史试验数据进行分析,根据分析结果选择最佳预测模型,并建立阻力修正系数ΔD0与单剖面运行时间预测偏差Δ的关系式.
3.1 试验描述
“海燕”团队在我国南海海域进行了海上试验.在试验中,“海燕-L”被设定为循环进行1000m深的典型锯齿形滑翔运动:下潜滑翔至1000m,然后上浮滑翔至水面.到达水面后,水下滑翔机通过卫星与岸基控制中心建立通信以传输关键数据信息,并接收新的控制指令.“海燕-L”的运行时间超过3个月,其航线如图5所示.

图5 “海燕-L”水下滑翔机航迹
对回收后的“海燕-L”进行了检测,未发现浮力驱动单元故障、姿态调节单元故障、耐压壳体渗水等问题.如图6所示,回收时的“海燕-L”与布放时的不同仅为发生了生物污损:整机表面覆盖了一层薄薄的黏液,机身与尾舵处被大量污损生物附着,机翼、天线处生物附着较少.
海上试验过程中“海燕-L”每个剖面的关键数据如图7~图9所示.从图中可以看中,试验中max的变化量约为40m,down与up的变化量约为4°.在试验前期,max、down与up的变化范围比较稳定,all呈不断增加的趋势.在试验后期,随着down与up的调整,all不断减小.由此可以看出,all同时受生物污损与max、down、up的影响,为了准确反映生物污损的程度需要从all中剔除max、down、up的影响.

图6 “海燕-L”海上试验现场

图7 单剖面最大工作深度
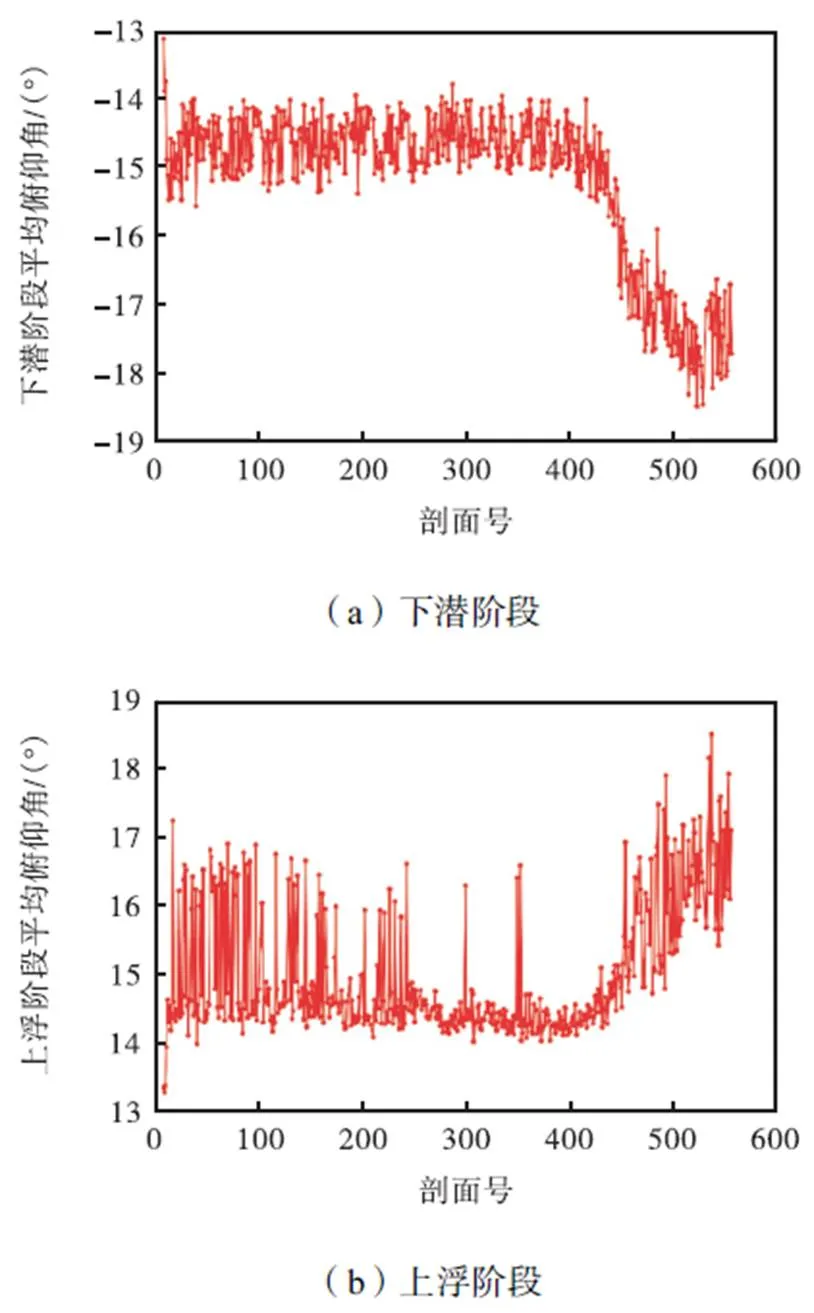
图8 单剖面平均俯仰角
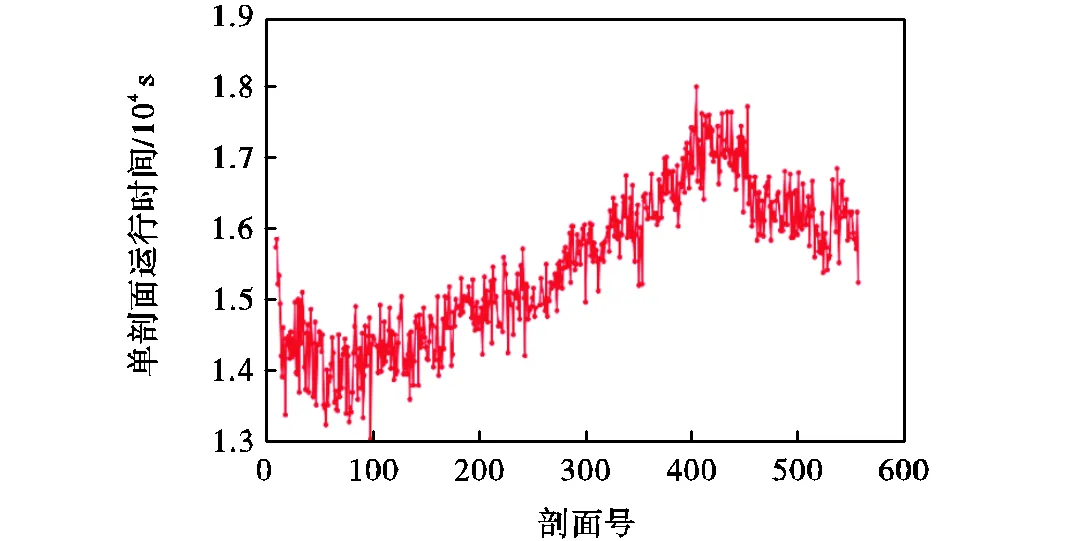
图9 单剖面运行时间
3.2 预测模型选择
选取试验中前100个剖面的关键数据,并将其随机拆分为一个训练集(包含70个剖面的关键数据)和一个测试集(包含30个剖面的关键数据).
对不同预测模型进行训练,每个模型对测试集的预测结果如图10与图11所示.具体评价指标如表2所示.由图10与图11可知,所有模型预测结果的相对误差均小于10%,均能对单剖面运行时间进行有效预测.由表2可知,SVM模型的预测效果优于的RF模型.此外,对超参数进行优化后模型的预测精度显著提升.与SVM模型相比,BO-SVM模型的误差指标(MAE、MAPE、RMSE)分别降低了59%、60% 和57%.
以上预测结果显示,与SVM、RS-SVM、RF、RS-RF和BO-RF模型相比,BO-SVM模型的误差指标(MAE、MAPE、RMSE)更小,分别为160.8、1.4%、209.6,证明BO-SVM模型对单剖面运行时间all具有更高的预测精度.因此,本文选择BO-SVM模型建立all与max、down、up的关系.

图10 不同模型对测试集的预测值与试验值的比较

图11 不同模型对测试集预测的相对误差
表2 剖面时间预测评价指标

Tab.2 Evaluation index of profile time prediction
由图12可知,随着时间的增加,单剖面运行时间的预测值与试验值的偏差不断增大,即Δ不断增大.由图13可知,在试验后期,单剖面运行时间预测偏差超过了3000s,相对偏差达到了20%.

图12 单剖面运行时间预测值与试验值的比较
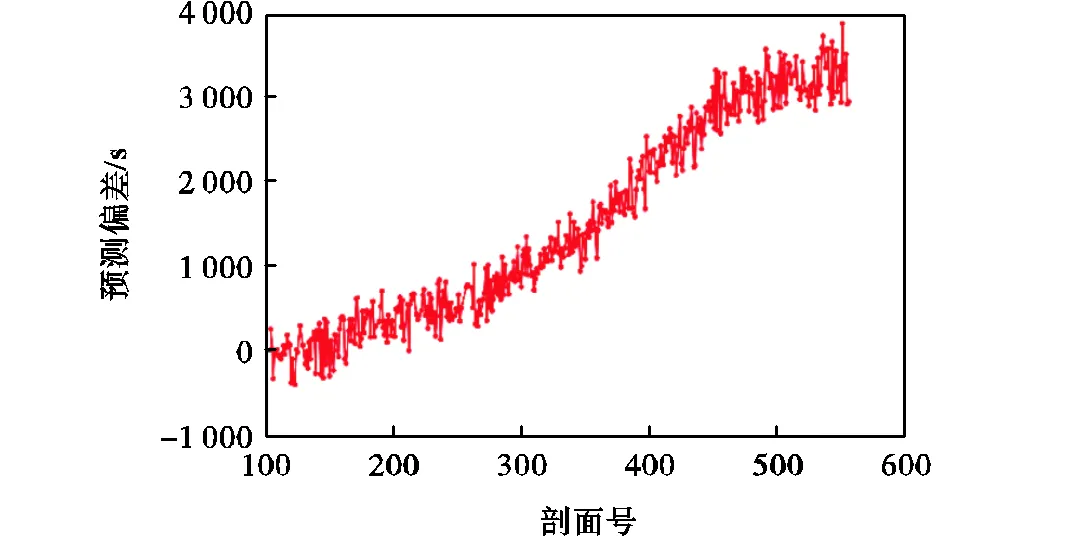
图13 单剖面运行时间预测偏差
3.3 阻力修正系数与剖面时间预测偏差的关系
在进行典型的锯齿形滑翔运动时,ΔD0对水下滑翔机的运动特性有较大影响.Song等[29]对水下滑翔机的能耗模型进行了参数灵敏度分析,结果表明阻力系数对水下滑翔机单剖面能耗与航程均有较大影响.因此,ΔD0为水下滑翔机运动模型中的关键参数之一,在海上试验过程中监测ΔD0的变化可以用于水下滑翔机性能分析并指导其控制参数制定与任务规划.
通过第1.2节中的分析发现,单剖面运行时间预测偏差Δ集中反映了水下滑翔机的阻力变化.因此,通过历史试验数据可以建立污损修正系数ΔD0与预测偏差Δ的关系式.为了建立上述关系式,利用参数辨识方法[6,15]获得了试验过程中每个剖面的阻力修正系数ΔD0,如图14所示.从图中可以看出,ΔD0的变化趋势与单剖面运行时间预测偏差Δ的变化趋势一致.

图14 ΔkD0的变化趋势
对第3.2节中得到的单剖面运行时间预测偏差Δ进行移动平均滤波处理,通过最小二乘法拟合得到ΔD0与Δ的关系,如图15所示,拟合结果为

式中拟合系数pi(i=1,2,3,4,5)分别为-7.4891×10-16、-1.165×10-11、-1.1828×10-8、-5.907×10-5、9.6921×10-4,多项式拟合结果的相关系数R为0.9997.
在试验过程中,通过单剖面运行时间预测模型可以获取单剖面时间预测偏差Δ,进而利用式(9)对阻力修正系数Δk0进行预测,从而更直接地反映水下滑翔机的污损程度及其性能变化.
4 试验验证
为了进一步验证所提出监测方法的正确性与有效性,“海燕”团队在我国南海海域进行了第2次海上试验,如图16所示.在试验过程中,利用本文所提出的监测方法得到了单剖面运行时间预测偏差Δ,利用式(9)得到了每个剖面ΔD0的预测值.在试验结束后,对完整试验数据进行分析并通过参数辨识方法得到ΔD0的试验值,用以验证预测结果的正确性.
2次试验结果的对比如表3所示.监测结果显示,第2次试验结束时Δ为1760s,ΔD0为0.127,远低于第1次试验的3275s和0.379.对比图6与图16可以发现,与第1次试验相比,第2次试验中“海燕-L”的生物污损程度较轻,证明监测指标Δ以及ΔD0均可以比较准确地反映出水下滑翔机的生物污损程度,本文的分析结果正确.

图16 “海燕-L”第2次海上试验现场
表3 海上试验结果对比

Tab.3 Comparison of the results of sea trials
利用式(9)预测得到的ΔD0如图17所示.从图中可以看出,预测结果与试验结果吻合较好,对阻力系数的最大预测误差仅为2%.因此,本文所提出监测方法可以实现对水下滑翔机生物污损程度的准确监测.

图17 ΔkD0的预测结果
5 结 论
本文针对水下滑翔机典型的锯齿形滑翔运动,利用机器学习方法建立了单剖面运行时间预测模型,以单剖面运行时间预测偏差为监测指标,提出了基于关键数据驱动的水下滑翔机生物污损监测方法,通过试验验证了该方法的正确性与有效性.
(1) 生物污损引起的阻力增大使水下滑翔机的单剖面运行时间显著增长,但生物污损引起的净浮力变化对单剖面运行时间影响不大.
(2) 与其他预测模型相比,贝叶斯优化-支持向量机(BO-SVM)模型预测结果的平均绝对误差(MAE)、平均绝对百分比误差(MAPE)和均方根误差(RMSE)更小,证明BO-SVM模型对all具有更高的预测精度.
(3) 单剖面运行时间预测偏差Δ与阻力修正系数ΔD0均可以反映水下滑翔机的生物污损程度.当水下滑翔机正常运行时,本文方法对其阻力系数的最大预测误差仅为2%,可以实现对生物污损程度的准确监测.
综上,本文所提出的方法能够快速获取水下滑翔机在海上运行过程中的性能变化,可以指导试验过程中控制参数制定与任务规划.同时,该方法也可为其他类型水下滑翔机的性能监测提供参考.
[1] Rudnick D L. Ocean research enabled by underwater gliders[J]. Annual Review of Marine Science,2016,8(1):519-541.
[2] 沈新蕊,王延辉,杨绍琼,等. 水下滑翔机技术发展现状与展望[J]. 水下无人系统学报,2018,26(2):89-106.
Shen Xinrui,Wang Yanhui,Yang Shaoqiong,et al. Development of underwater gliders:An overview and prospect [J]. Journal of Unmanned Undersea Systems,2018,26(2):89-106(in Chinese).
[3] 何柏岩,杜金辉,杨绍琼,等. 基于VMD-LSSVM的水下滑翔机深平均流预测[J]. 天津大学学报(自然科学与工程技术版),2021,54(4):388-396.
He Baiyan,Du Jinhui,Yang Shaoqiong,et al. Prediction of underwater glider depth-averaged current velocity based on VMD-LSSVM[J]. Journal of Tianjin University (Science and Technology),2021,54(4):388-396(in Chinese).
[4] 王树新,宋 扬,王延辉,等. 基于Sobol’法的Petrel-Ⅱ水下滑翔机能耗参数灵敏度分析[J]. 天津大学学报(自然科学与工程技术版),2017,50(2):113-120.
Wang Shuxin,Song Yang,Wang Yanhui,et al. Sensitivity analysis of energy consumption parameters of Petrel-Ⅱ underwater glider based on Sobol’ method[J]. Journal of Tianjin University(Science and Technol-ogy),2017,50(2):113-120(in Chinese).
[5] Haldeman C D,Aragon D K,Miles T,et al. Lessening biofouling on long-duration AUV flights:Behavior modifications and lessons learned[C]//Oceans. Monterey,CA,USA,2016:1-8.
[6] Wang S,Yang M,Wang Y,et al. Optimization of flight parameters for Petrel-L underwater glider[J]. IEEE Journal of Oceanic Engineering,2021:46(3):817-828.
[7] Anderlini E,Thomas G,Woodward S C A,et al. Identification of the dynamics of biofouled underwater gliders[C]//IEEE/OES AUV Symposium. St Johns,NL,Canada,2020:1-6.
[8] Marine epibiosis. I. Fouling and anti-fouling:Some basic aspects[J]. Marine Ecology Progress Series,1989,58:175-189.
[9] Davis R E,Kessler W S,Sherman J T. Gliders measure western boundary current transport from the south pacific to the equator[J]. Journal of Physical Oceanography,2012,42(11):2001-2013.
[10] Rudnick D L,Johnston T M S,Sherman J T. High-frequency internal waves near the luzon strait observed by underwater gliders[J]. Journal of Geophysical Research:Oceans,2013,118(2):774-784.
[11] Todd R E,Rudnick D L,Sherman J T,et al. Absolute velocity estimates from autonomous underwater gliders equipped with doppler current profilers[J]. Journal of At-mospheric and Oceanic Technology,2017,34(2):309-333.
[12] Anderlini E,Harris C,Phillips A B,et al. Towards autonomy:A recommender system for the determination of trim and flight parameters for seagliders[J]. Ocean Engineering,2019,189:1-14.
[13] Gao S,He B,Yu F,et al. An abnormal motion condition monitoring method based on the dynamic model and complex network for AUV[J]. Ocean Engineering,2021,237:1-11.
[14] Eriksen C C,Osse T J,Light R D,et al. Sea-glider:A long-range autonomous underwater vehicle for oceanographic research [J]. IEEE Journal of Oceanic Engineering,2001,26(4):424-436.
[15] Merckelbach L,Smeed D,Griffiths G. Vertical water velocities from underwater gliders[J]. Journal of Atmospheric and Oceanic Technology,2010,27(3):547-563.
[16] Frajka-Williams E,Eriksen C C,Rhines P B,et al. Determining vertical water velocities from seaglider[J]. Journal of Atmospheric and Oceanic Technology,2011,28(12):1641-1656.
[17] Graver J G,Bachmayer R,Leonard N E. Underwater glider model parameter identification[C]//Proceedings of the 13th International Symposium on Unmanned Untethered Submersible Technology. Durham,NH,USA,2003:1-12.
[18]牛文栋,王延辉,杨艳鹏,等. 混合驱动水下滑翔机水动力参数辨识[J]. 力学学报,2016,48(4):813-822.
Niu Wendong,Wang Yanhui,Yang Yanpeng,et al. Hydrodynamic parameter identification of hybrid-driven underwater glider[J]. Chinese Journal of Theoretical and Applied Mechanics,2016,48(4):813-822(in Chinese).
[19] Williams C D,Bachmayer R,de Young B. Progress in predicting the performance of ocean gliders from at-sea measurements[C]//Oceans. Quebec City,QC,Canada,2008:1-8.
[20] Ma W,Wang Y,Wang S,et al. Optimization of hydrodynamic parameters for underwater glider based on the electromagnetic velocity sensor[J]. Proceedings of the Institution of Mechanical Engineers,Part C:Journal of Mechanical Engineering Science,2019,233(14):5019-5032.
[21] Merckelbach L,Berger A,Krahmann G,et al. A dynamic flight model for slocum gliders and implications for turbulence microstructure measurements[J]. Journal of Atmospheric and Oceanic Technology,2019,36(2):281-296.
[22] Yang M,Wang Y,Wang S,et al. Motion parameter optimization for gliding strategy analysis of underwater gliders[J]. Ocean Engineering,2019,191:1-12.
[23] Michau G,Fink O. Unsupervised transfer learning for anomaly detection:Application to complementary operating condition transfer[J]. Knowledge-Based Systems,2021,216:1-9.
[24] Vapnik V,Guyon I,Hastie T. Support vector machines[J]. Machine Learn,1995,20(3):273-297.
[25] Breiman L. Random forests[J]. Machine Learning,2001,45(1):5-32.
[26] Bhat P C,Prosper H B,Sekmen S,et al. Optimizing event selection with the random grid search[J]. Computer Physics Communications,2018,228:245-257.
[27] Bergstra J,Bengio Y. Random search for hyper-parameter optimization[J]. Journal of machine learning research,2012,13 (1):281-305.
[28] Shahriari B,Swersky K,Wang Z,et al. Taking the human out of the loop:A review of bayesian optimization[J]. Proceedings of the IEEE,2016,104(1):148-175.
[29]Song Y,Wang Y,Yang S,et al. Sensitivity analysis and parameter optimization of energy consumption for underwater gliders[J]. Energy,2019,191:1-16.
Data-Driven Method for Underwater Glider Biofouling Monitoring
Wang Yanhui1, 2,Zhang Xinhai1,Yang Ming1,Yan Caiqing1,Yang Shaoqiong1, 2, 3
(1. School of Mechanical Engineering,Tianjin University,Tianjin 300350,China;2. The Joint Laboratory of Ocean Observing and Detection,Pilot National Laboratory for Marine Science and Technology(Qingdao),Qingdao 266237,China;3. Qingdao Institute for Ocean Engineering of Tianjin University,Qingdao 266237,China)
This study proposes a data-driven biofouling monitoring method for monitoring the biofouling of the“Pet-rel-L” underwater glider independently developed by China,in order to address the biofouling problem during its long-term operation. The method will help set the control parameters and plan the mission during the experiment. First,the effect of biofouling on the operation time of the underwater glider in a single profile was investigated via dynamic model simulation. Then,based on the results of the dynamic simulation,a biofouling monitoring method was proposed by combining the shore-based maneuvering conditions and the communication mode of the underwater glider. By applying the original data obtained in the pretest period when the glider was not yet biofouled,a prediction model based on the machine learning method was established to predict the operation time of Petrel-L in a single gliding profile,and then the prediction deviation was monitored. The relationship equation between the drag coefficient and prediction deviation was proposed to predict the change in drag caused by biofouling. Finally,the correctness and validity of the proposed method were verified via sea trials. Experimental results show that the prediction deviation of single gliding profile operation time and drag coefficient can reflect the biofouling degree of the underwater glider. When the underwater glider is in normal operation,the maximum prediction error of the proposed method is only 2%,which allows for accurate monitoring of the biofouling degree of the underwater glider. The proposed method can quickly obtain the performance change in the glider merely using some key data during the operation,which greatly improves the monitoring efficiency and can provide support for the practical application of “Petrel-L” at sea. Further,the method can also provide a reference for the performance monitoring of other types of underwater gliders.
underwater glider;biofouling;condition monitoring;data-driven method
TP242.3
A
0493-2137(2023)01-0093-10
10.11784/tdxbz202109002
2021-09-14;
2021-10-18.
王延辉(1979— ),男,博士,教授,yanhuiwang@tju.edu.cn.
杨绍琼,shaoqiongy@tju.edu.cn.
国家自然科学基金资助项目(11902219),天津市自然科学基金资助项目(18JCJQJC46400).
Supported by the National Natural Science Foundation of China(No.11902219),the Natural Science Foundation of Tianjin,China (No.18JCJQJC46400).
(责任编辑:许延芳)
