执行器故障下临近空间飞行器容错控制重构
2023-02-15窦立谦唐艺璠张秀云
窦立谦,唐艺璠,张秀云
执行器故障下临近空间飞行器容错控制重构
窦立谦,唐艺璠,张秀云
(天津大学电气自动化与信息工程学院,天津 300072)
临近空间飞行器飞行条件复杂、气动环境恶劣,极易导致飞行器舵面出现故障,容错控制是保证飞行器安全运行的关键,对此提出了一种基于观测器-控制器的有限时间高精度容错控制重构策略.首先,为提高容错控制的精确性,在故障影响下飞行器姿态模型基础上,设计了双层快速自适应滑模观测器,实现对包含故障、干扰等在内的综合干扰有限时间估计,避免了传统自适应增益的过估计,从而有效提高观测器估计精度;进一步基于观测器估计值设计容错控制器,获得故障影响下的期望控制力矩,实现飞行姿态的有限时间容错控制.其次,针对故障时气动舵面实际提供的控制力矩难以满足期望值的问题,引入推力矢量喷管作为补充执行器.考虑故障舵面特性,采用基于二次规划的最优控制分配策略,将期望力矩合理分配到气动舵面及矢量喷管上,通过矢量喷管补偿故障舵面力矩损失,实现执行器故障下控制重构. 最后,通过数值仿真验证了所设计观测器的优越性,并验证了所提出容错控制重构策略的有效性.
临近空间飞行器;容错控制;自适应滑模观测器;控制分配
临近空间飞行器(NSV)是指在20~100km的临近空间区域内飞行并完成特定任务的飞行器.其飞行速度快、高度范围广的特点使其成为现代战争中进行空天作战的关键武器[1].然而,临近空间飞行器在完成飞行任务过程中,轨迹与姿态变化剧烈,飞行条件极端复杂,气动环境非常恶劣.这些不利因素极易导致飞行器执行器出现故障,若不及时进行容错处理,将会影响飞行器安全稳定飞行,甚至导致飞行器失稳坠毁.因此,研究执行器非致命故障下的容错控制重构技术是保证临近空间飞行器安全性的关键.
容错控制分为两种:主动容错与被动容错[2].被动容错将故障及干扰等处理为系统综合不确定,通过系统的鲁棒性达到容错目的,在飞行器容错控制中已有较为深入的研究.文献[3-4]针对高超声速舵面故障,基于反馈线性化,设计带有在线参数辨识的容错控制器,实现对故障等引起的系统综合不确定的自适应估计.文献[5]针对多干扰及时变故障影响下的再入飞行器控制问题,基于高阶滑模观测器对综合不确定的估计,设计有限时间容错控制器,并利用递归神经网络进行控制舵分配,保证飞行器的安全稳定运行.文献[6]针对高超声速飞行器故障问题,设计了一种改进的有限时间指令滤波反步容错控制器,实现飞行器安全稳定运行.文献[7]针对复合干扰及间歇性故障共同影响下的高超声速飞行器,提出一种改进的自适应容错控制算法,实现故障下飞行器系统的稳定性.目前飞行器被动容错控制中,大多利用观测器等对故障、干扰等在内的综合不确定进行估计,但目前所设计的自适应观测器存在对不确定的过估计问题,难以保证高精度估计及控制.然而考虑到飞行器出现故障后仍需完成飞行任务,如何设计一种新型的高精度鲁棒容错控制器,在出现故障的情况下仍能保证对参考指令的精确跟踪,是本文研究的关键.
因此,为提高故障影响下临近空间飞行器姿态容错控制的精确性,保证故障下,本文提出了一种高精度容错控制重构策略,具体贡献归纳如下:
(1) 设计双层快速自适应滑模观测器,观测器增益依据干扰大小自适应调整,避免过估计带来的抖振问题,实现对包含故障在内的综合干扰有限时间高精度估计;进一步基于估计值设计容错控制器实现控制系统有限时间收敛;
(2) 依据飞行器舵面故障特性,提出最优控制分配策略,引入推力矢量,有效补偿了故障舵面损失的力矩,实现了故障下执行器控制重构.
1 非致命故障下飞行器面向控制模型
1.1 临近空间飞行器姿态控制模型
考虑外界干扰,临近空间飞行器控制模型可以表示[8]为



由此得控制力矩与执行器偏转间的关系为

1.2 推力矢量模型
引入推力矢量技术可以通过矢量喷管的偏转提供三轴方向力矩,对姿态角速率产生直接控制作用.在推力矢量作用下,控制力矩由气动舵面与推力矢量共同产生,其公式变为



1.3 执行器故障模型

1.3.1 舵面效率损失故障

1.3.2 舵面卡死故障


1.3.3 综合故障分析
考虑飞行器舵面卡死故障及效率损失故障共同影响,故障下舵面偏转模型可以综合表示[11]为

出现综合故障的具体情况描述如下:
考虑舵面综合故障,将式(5)和式(12)代入姿态角速率控制系统(2)得


进一步得到综合舵面故障姿态控制模型


2 基于双层快速自适应滑模观测器的容错控制重构
临近空间飞行器姿态容错控制重构分为3部分,结构如图1所示.首先,基于故障影响下临近空间飞行器姿态控制模型,设计双层快速自适应滑模观测器,用于实现对包括舵面故障和外界干扰在内的综合干扰的有限时间估计;其次,基于观测值设计容错控制器,获得期望控制力矩,保证故障下控制系统有限时间高精度收敛;最后,设计最优分配策略,将期望控制力矩分配气动舵面和矢量喷管上,以推力矢量补充故障舵面损失的力矩,最终实现容错控制重构,保证临近空间飞行器故障下安全飞行.

图1 临近空间飞行器姿态容错控制重构结构
2.1 双层快速自适应滑模观测器设计

基于式(15),设计双层快速自适应滑模观测器为







定义关系式
选择李雅普诺夫函数
对式(27)求导得






进一步得到

2.2 容错控制器设计
引理2[14]针对积分链系统



针对临近空间飞行器姿态控制系统,定义跟踪误差为

考虑观测器对综合干扰的估计,基于飞行器动力学模型(14)和(15),建立误差动态方程为
设计容错控制器


2.3 执行器非致命故障影响下的重构
当气动舵面发生故障时,舵面实际产生的力矩难以满足期望控制力矩,采用矢量喷管补偿气动舵面受故障影响无法提供的力矩,最终通过最优控制分配实现控制重构.
舵面的偏转约束条件为
基于控制效率矩阵和舵面偏转约束条件,针对舵面故障影响下的控制重分配问题,采用有约束的最优二次规划方法进行控制分配求解.


3 仿真验证
3.1 参数设置
3.2 仿真结果分析
1)仿真1所设计观测器与典型观测器对比仿真
为验证所设计观测器的优越性,对比典型自适应滑模观测器与所设计观测器对综合干扰的估计效果.自适应滑模观测器表达[15]为


采用所设计的观测器及典型自适应滑模观测器对综合干扰进行估计,观测器对比仿真效果如图2和图3所示.
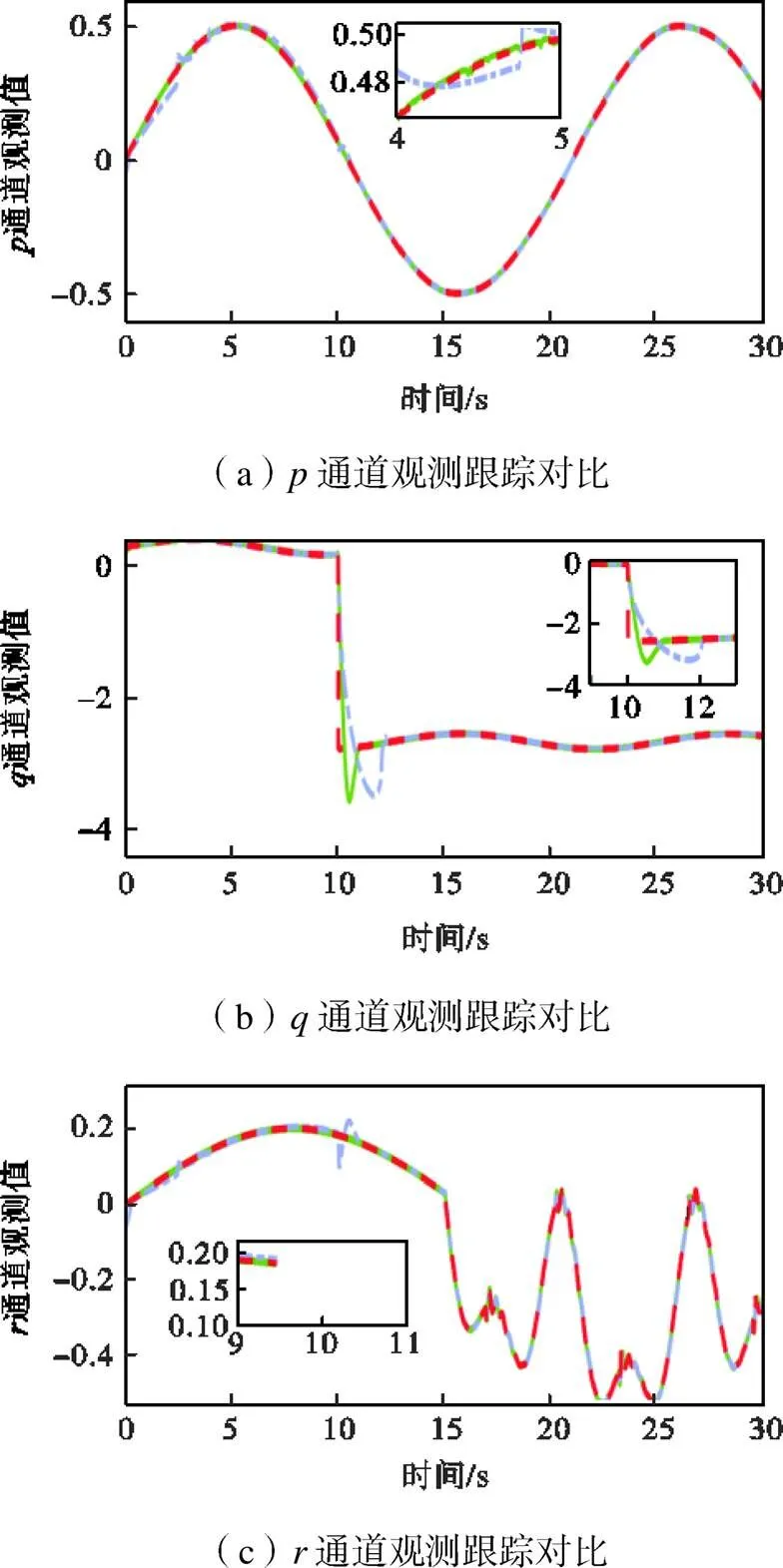
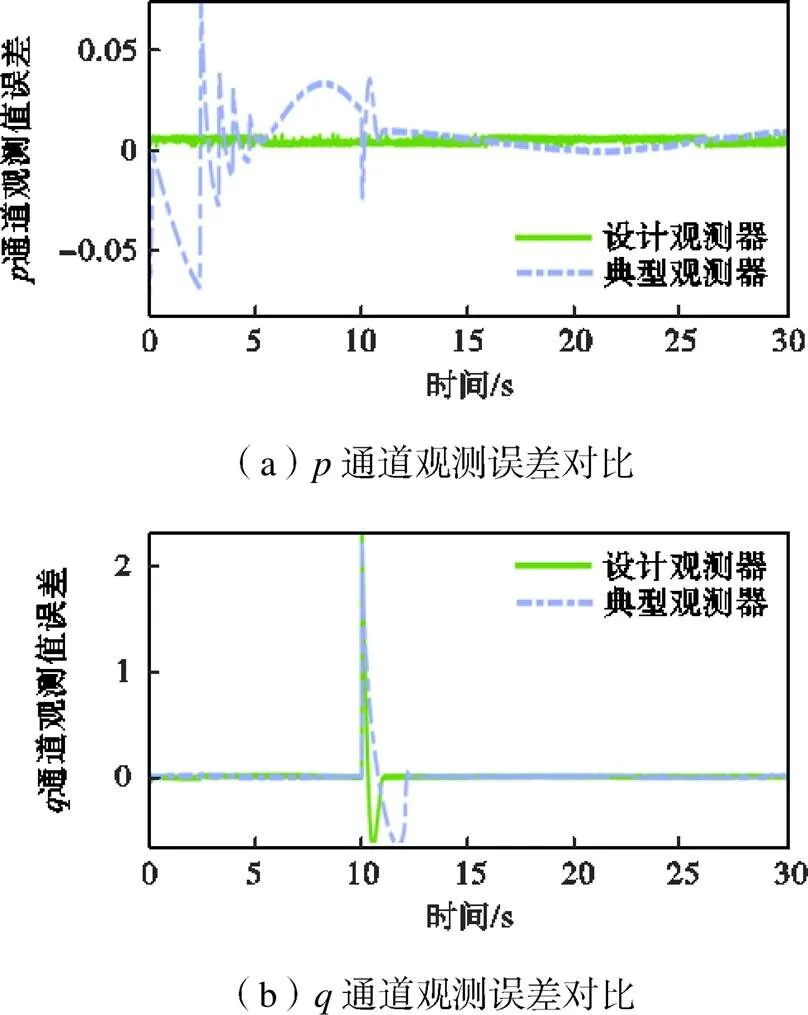
图2为所设计观测器与典型自适应滑模观测器对综合干扰的跟踪对比曲线.从图2中可以看到所设计观测器响应速度快,能够在1s内恢复对干扰的估计.图3为两种观测器的观测误差对比,所设计观测器的观测精度高,估计误差精度达到0.005.由此说明,所设计的观测器能够对故障及外界扰动所构成的综合干扰进行准确快速估计,证明了观测器的有效性.
2)仿真2 舵面故障下飞行器姿态跟踪仿真
图4~图6为姿态角跟踪参考指令的仿真,姿态角实现对给定参考指令的稳定跟踪.图7和图8为控制重分配之后各执行器偏转角度.由仿真图可以看出,升降舵在第10s卡死在2°后将一直处于卡死状态,无法进行灵活调整,方向舵在15s出现0.8效率损失故障后,方向舵能够提供的偏转角度明显变小,缺失的力矩主要由推力矢量舵面进行补偿,以实现最优控制分配的目标.由此可知所设计的容错控制重构策略可以在舵面非致命故障影响下实现对姿态角的有效控制,提高了飞行器的容错能力.

图4 滚转角跟踪曲线及跟踪误差曲线
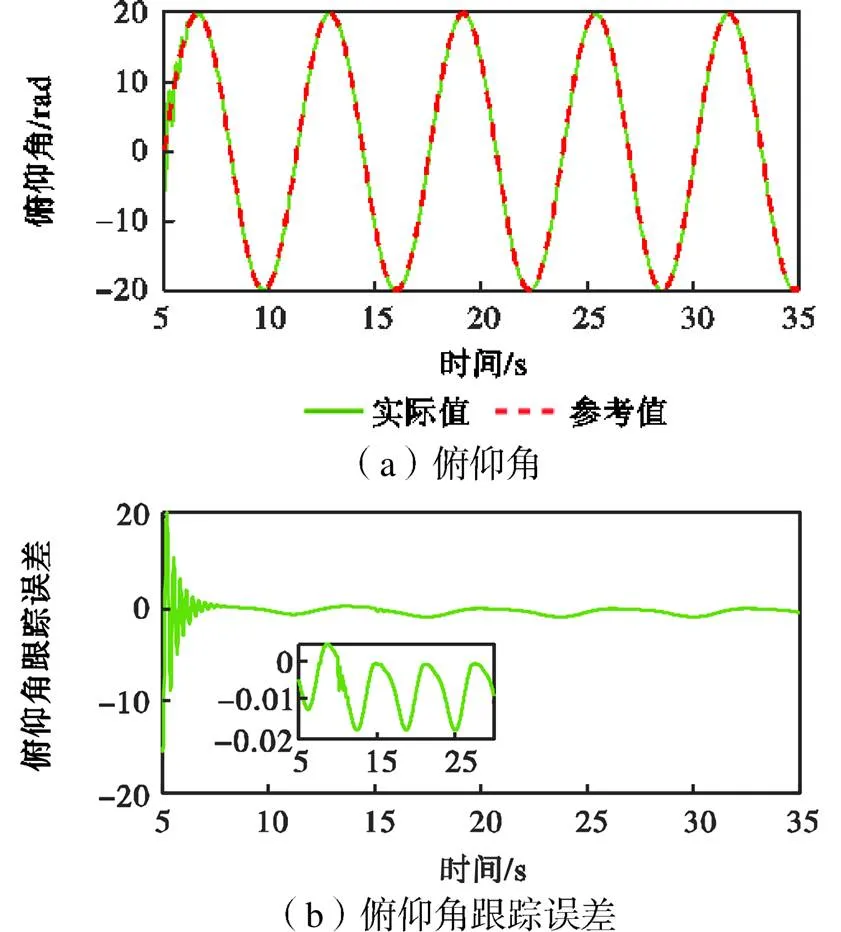
图5 俯仰角跟踪曲线及跟踪误差曲线
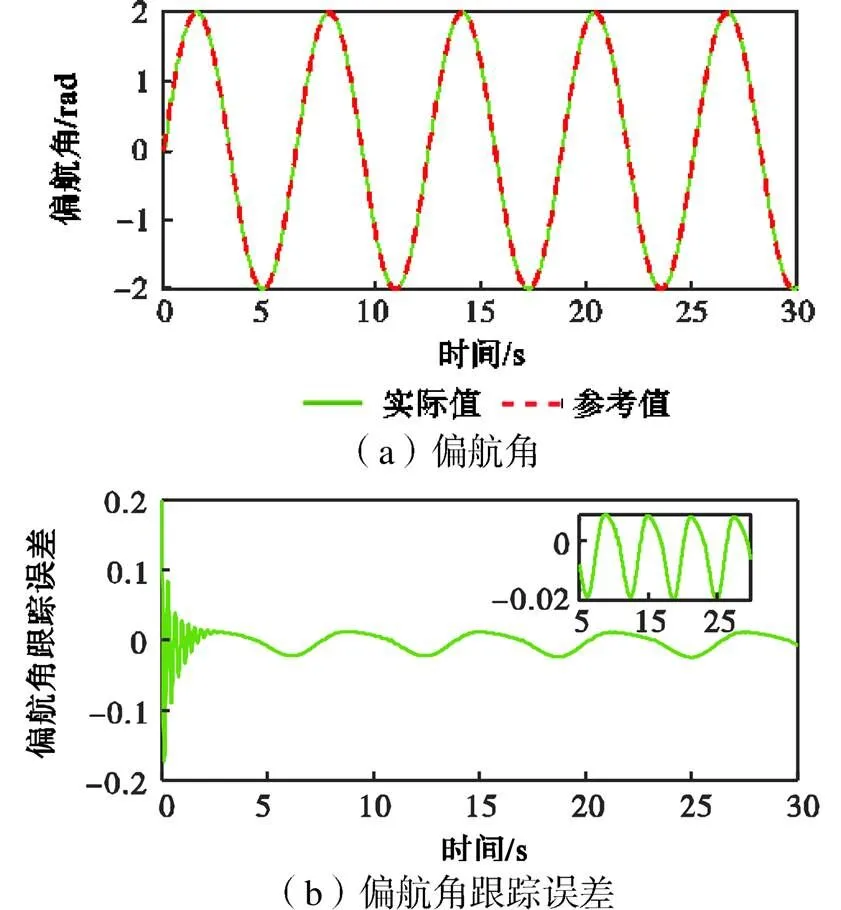
图6 偏航角跟踪曲线及跟踪误差曲线

图7 气动舵面故障下执行器气动舵面重分配偏转角度
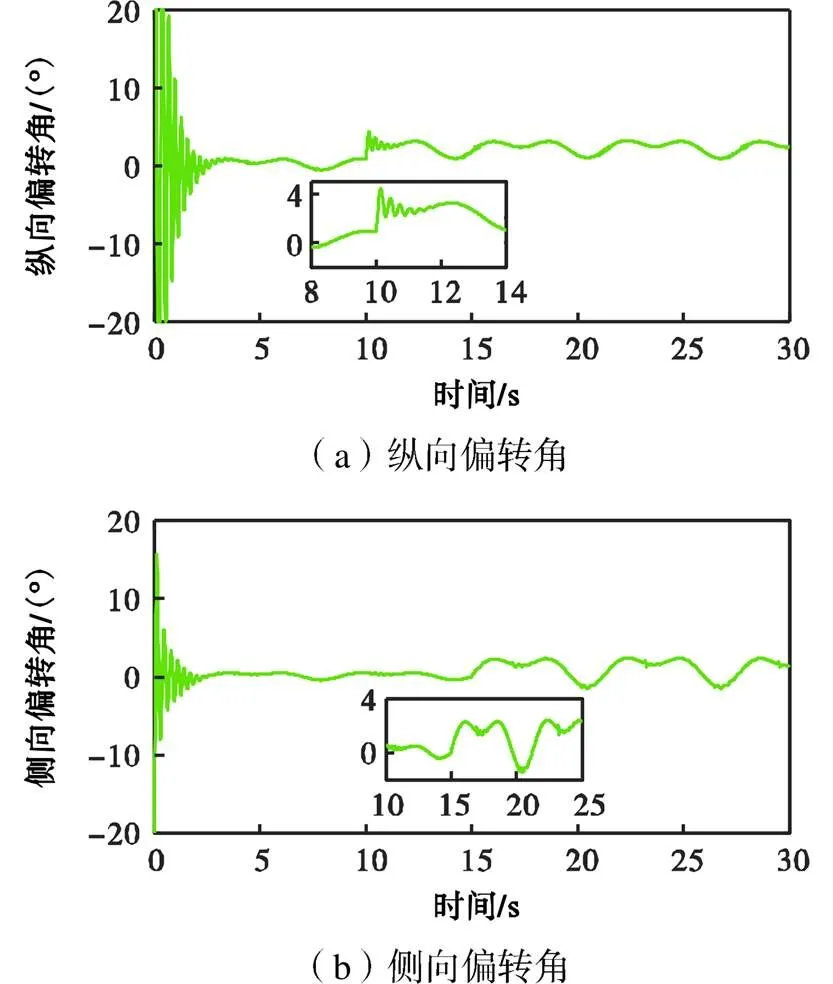
图8 气动舵面故障下执行器矢量喷管重分配偏转角度
4 结 语
为确保临近空间飞行器在执行器故障影响下对参考指令的精确跟踪,本文提出了一种基于观测器-控制器的高精度容错控制重构策略.考虑执行器效率损失及卡死故障,建立故障下带有推力矢量的飞行器姿态控制模型;设计了双层快速自适应滑模观测器,该观测器具有自适应增益非过估计、抖振小、估计精度高的优点,可以在干扰突变后快速恢复对综合干扰的估计;进一步结合容错控制器,实现对飞行姿态有限时间容错控制;最后,考虑故障特性用矢量喷管提供补充力矩,完成控制重构.最终实现执行器故障下临近空间飞行器姿态角对参考指令精确跟踪,降低故障对飞行性能的影响.
[1] 包为民. 航天飞行器控制技术研究现状与发展趋势[J]. 自动化学报,2013,39(6):697-702.
Bao Weimin. Present situation and development tendency of aerospace control techniques[J]. Acta Automatica Sinica,2013,39(6):697-702(in Chinese).
[2] Eterno J S,Weiss J L,Looze D P,et al. Design issues for fault tolerant-restructurable aircraft control[C]//IEEE Conference on Decision and Control. Fort Lauderdale,USA,1985:900-905.
[3] Xu B Y,Qi R Y,Jiang B. Adaptive fault-tolerant control for HSV with unknown control direction[J]. IEEE Transactions on Aerospace and Electronic Systems,2019,55(6):2743-2758.
[4] 董 旺,齐瑞云,姜 斌. 空天飞行器直接力/气动力复合容错控制[J]. 航空学报,2020,41(11):78-91.
Dong Wang,Qi Ruiyun,Jiang Bin. Composite fault tolerant control for aerospace vehicle with swing engines and aerodynamic fins[J]. Acta Aeronauticaet Astronautica Sinica,2020,41(11):78-91(in Chinese).
[5] Yu Yue,Wang Honglun,Li Na. Fault-tolerant control for over-actuated hypersonic reentry vehicle subject to multiple disturbances and actuator faults[J]. Aerospace Science and Technology,2019,87:230-243.
[6] Zhang Xiuyun,Zong Qun,Dou liqian,et al. Improved finite-time command filtered backstepping fault-tolerant control for flexible hypersonic vehicle[J]. Journal of the Franklin Institute,2020,357(13):8543-8565.
[7] 胡开宇,陈复扬,程子安. 高超声速飞行器间歇故障改进自适应容错控制[J]. 控制与决策,2021,36(11):2627-2636.
Hu Kaiyu,Chen Fuyang,Cheng Zi’an. Improved adaptive fault-tolerant control of intermittent faults in hypersonic flight vehicle[J]. Control and Decision,2021,36(11):2627-2636(in Chinese).
[8] Liu Junjie,Sun Mingwei,Chen Zengqinag,et al. Super-twisting sliding mode control for aircraft at high angle of attack based on finite-time extended state observer[J]. Nonlinear Dynamics,2020,99:2785.
[9] Yu Y,Wang H,Li N. Fault-tolerant control for over-actuated hypersonic reentry vehicle subject to multiple disturbances and actuator faults[J]. Aerospace Science and Technology,2019,87:230-243.
[10] Bolende M A,Domand B. Nonlinear longitudinal dynamical model of an air-breathing hypersonic vehicle[J]. Journal of Spacecraft and Rockets,2007,44(2):374-387.
[11] Zhang Z H,Li S,YanH,et al. Sliding mode switching observer-based actuator fault detection and isolation for a class of uncertain systems[J]. Nonlinear Analysis Hybrid Systems,2019,33:322-335.
[12] Levant A. Sliding order and sliding accuracy in sliding mode control[J]. International Journal of Control,1993,58(6):1247-1263.
[13] Utkin V I,Poznyak A S. Adaptive sliding mode control with application to super-twisting algorithm:Equivalent control method[J]. Automatica,2013,49:39-47.
[14] Tian B,Liu L,Lu H,et al. Multivariable finite time attitude control for quadrotor UAV:Theory and experimentation[J]. IEEE Transactions on Industrial Electronics,2018,65(3):2567-2557.
[15] Dong Q,Zong Q,Tian B,et al. Adaptive disturbance observer‐based finite‐time continuous fault‐tolerant control for reentry RLV[J]. International Journal of Robust and Nonlinear Control,2017,27(18):4275-4295.
Fault-Tolerant Control Reconstruction of Near Space Vehicle Under Actuator Faults
Dou Liqian,Tang Yifan,Zhang Xiuyun
(School of Electrical and Information Engineering,Tianjin University,Tianjin 300072,China)
The flight conditions of near space vehicles are complex and the aerodynamic environment is poor,which can easily lead to the failure of the aircraft rudder. Fault-tolerant control is the key to ensuring the safe operation of the aircraft. A finite-time and high-precision fault-tolerant control reconfiguration strategy based on observer-controller is proposed. Firstly,to improve the accuracy of fault-tolerant control,a double-layer fast adaptive sliding mode observer is designed based on the attitude model of aircraft under the influence of faults. The finite-time estimation of comprehensive disturbances including faults and other disturbances is realized,and the overestimation of the traditional adaptive gain is avoided,so as to effectively improve the estimation accuracy of the observer. Based on the estimation of disturbance,a fault-tolerant controller is designed to obtain the desired control torque under the influence of fault,and the finite time fault-tolerant control of flight attitude is realized. Second,the actual control torque provided by the aerodynamic rudder is difficult to meet the expected value when the fault occurs,the thrust vectoring nozzles are therefore introduced as supplementary actuators. Considering the characteristics of the fault rudder,the optimal control allocation strategy based on quadratic programming is adopted. The expected torque is reasonably distributed to aerodynamic rudders and the vector nozzles. Vectoring nozzles are used to compensate for torque loss of the fault rudder and realize the control reconfiguration under actuator fault. Finally,the superiority of the designed observer is verified by numerical simulations,and the effectiveness of the proposed fault-tolerant control reconfiguration strategy is verified.
near space vehicle(NSV);fault-tolerant control;adaptive sliding mode observer;control allocation
10.11784/tdxbz202111034
TP237
A
0493-2137(2023)02-0160-09
2021-11-19;
2022-04-18.
窦立谦(1976— ),男,博士,副教授,douliqian@tju.edu.cn.
张秀云,zxy_11@tju.edu.cn.
国家自然科学基金资助项目(61873340,61903349,62073234,62003236,62022060).
Supported by the National Natural Science Foundation of China(No.61873340,No.61903349,No.62073234,No.62003236,No.62022060).
(责任编辑:孙立华)