考虑备切机组涉频特性的高频切机优化方法
2023-02-13姜惠兰李希钰
姜惠兰,李希钰,肖 瑞
(天津大学智能电网教育部重点实验室,天津 300072)
随着我国能源转型的不断推进,风力、光伏等新能源的并网规模也在逐年扩大,使得电网结构相对薄弱的区域型送端电网中出现直流外送通道故障产生大量的过剩功率,容易引发严重的高频问题,威胁电网的安全稳定运行。作为频率紧急控制措施,高频切机方案是抵御过剩功率故障下高频危害的重要控制措施[1-2]。随着新能源场站级涉频技术的不断成熟,高频切机方案中备切机组的涉频特性差异也越来越明显,所以考虑机组涉频特性的高频切机方案优化方法有待进一步研究。
文献[3-4]分析了不同类型机组的频率响应特性,为保证高频切机方案对不同程度负荷缺失的适应性,采用基于“最小欠切原则”的方法分轮次确定高频切机方案;文献[5-7]根据工程运行经验给出多个备选切机方案,通过对比各方案的实施效果确定最优方案;文献[8]针对系统频率响应特性及影响因素进行分析,考虑高频切机方案与机组超速保护、低频减载保护等控制措施的协调配合,确定高频切机方案各轮次的动作频率、动作延时、切机量及切机类型;文献[9]将高频切机方案整定模型分解为首轮单次切机总量子模型和分轮次切机量优化子模型,依据系统暂态频率裕度指标和机组与故障点间的电气距离进行机组组合方式的优化;文献[10]依据系统送端线路故障情况构造罚函数,按故障程度及概率确定适应各故障情况的高频切机方案。
现有高频切机组合方案的寻优方法,一方面忽略了系统频率特性曲线在不同时间区段的影响因素、特征的差异以及相互关联性,不够全面体现高频切机方案实施效果的优势;另一方面,高频切机方案在整定满足系统频率约束的各轮次切机量时,忽略了被切除机组的涉频特性差异对切机方案的影响,难以达到最优的实施效果和对所有故障情况的适用性。本文通过分析高频切除机组对系统频率响应特性的影响,给出了一种依据不同频率响应阶段下系统频率特性差异评价高频切机方案实施效果的目标函数,在此基础上,提出考虑机组涉频特性的高频切机方案递进修正优化方法。它是在满足系统频率响应变化曲线约束的前提下,依据频率变化曲线在不同频率响应阶段下的特性差异和影响因素,建立切机量最小和评价指标最优的多目标优化模型,同时制定了切机方案各轮次初始切机量和递进修正整定量的措施,达到权衡总切机量最小与实施效果最优的效果。
1 备切机组涉频特性对系统高频响应的影响
本文采用电力系统等值模型分析系统高频响应过程。图1所示的分析高频响应的等值模型,考虑了负荷频率调节效应,机组的功率调节和调速器惯性响应。
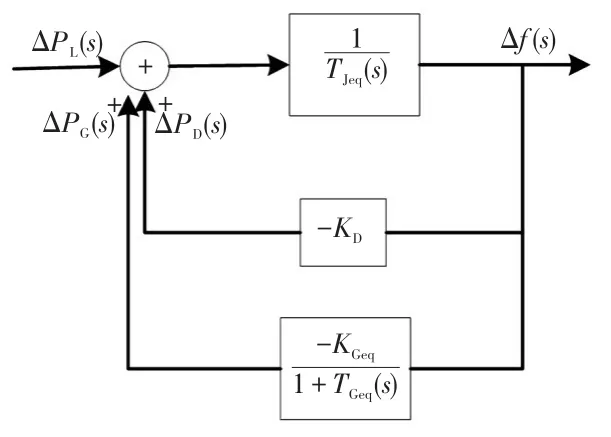
图1 高频响应等值模型Fig.1 Equivalent model of over-frequency response
图1中:ΔPL为过剩功率,Δf为系统频率变化量,ΔPG为同步机组出力改变量,ΔPD为负荷变化量,TJeq为系统等值惯性时间常数,KGeq为系统等值单位调节功率,TGeq为等值机组调速器时间常数,KD为负荷频率调节效应系数,s为拉普拉斯算子。
由图1可以得到系统频率响应过剩功率变化的传递函数G(s)[11]为
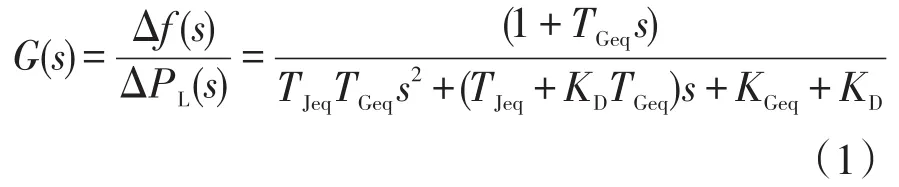

通过拉氏反变换得到频率偏差的时域表达式为
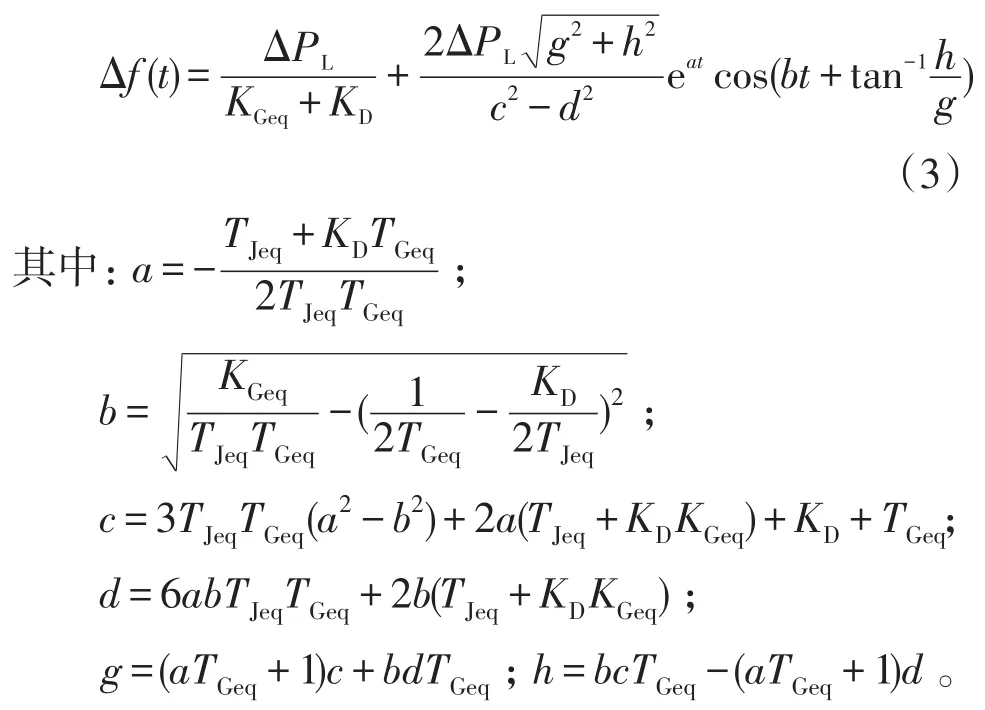
可见,频率暂态变化特性主要受系统的等值惯性时间常数、调节功率能力影响,而机组涉频特性差异也正体现在自身的惯性时间常数和单位调节功率上。
设切机动作后的系统等值惯性时间常数为TJeq.trip,等值单位调节功率为KGeq.trip,上述参数均以系统总额定容量为基准值,则有
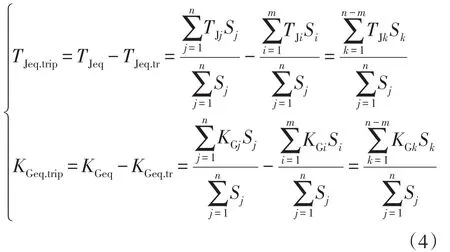
式中:n为机组总台数;m为切除的备切机组台数;TJeq.tr和KGeq.tr分别为被切除机组的等值惯性时间常数和等值单位调节功率;TJi、KGi和Si分别为机组i的惯性时间常数、单位调节功率和额定容量。
由式(4)可以看出,随着高频切机逐轮次动作切除发电机组,TJeq.tr和KGeq.tr会不断增大,使得切机动作后的系统等值惯性时间常数TJeq.trip和KGeq.trip随动作轮次的增加不断减小,且系统等值涉频参数水平会因被切除机组的涉频特性差异而不同,进而影响系统在过剩功率故障下的高频响应过程,这也是不同高频切机机组组合方式会产生不同的实施效果的原因。
2 评价不同频率响应阶段下高频切机实施效果的目标函数
2.1 频率响应阶段的划分
系统等效转子运动方程为

式中:TJeq为系统等效惯性时间常数;PmΣ为总机械功率;PeΣ为总电磁功率;Δf为系统频率偏差。
从式(5)可知:dΔf/ dt的方向能够反映系统总机械功率PmΣ和总电磁功率PeΣ的关系。若PmΣ>PeΣ,则dΔfdt>0 ;若PmΣ<PeΣ,则dΔf/ dt<0。本文主要依据dΔf/ dt的变化方向来划分系统高频响应时间阶段,如图2所示。阶段I:从故障时刻t0到频率最高tmax区段,dΔf/ dt>0,且由最大值逐渐衰减至0;阶段II:从频率最高tmax到频率最低tmin区段,dΔf/ dt<0 ;阶段III:从频率最低tmin到稳态值t∞的区段,系统经小幅波动达到稳态。该时段划分方法可以利用同一阶段下的频率响应变化基本具有一致性的特点,合理地分析不同阶段下的高频切机方案实施效果需求的差异。
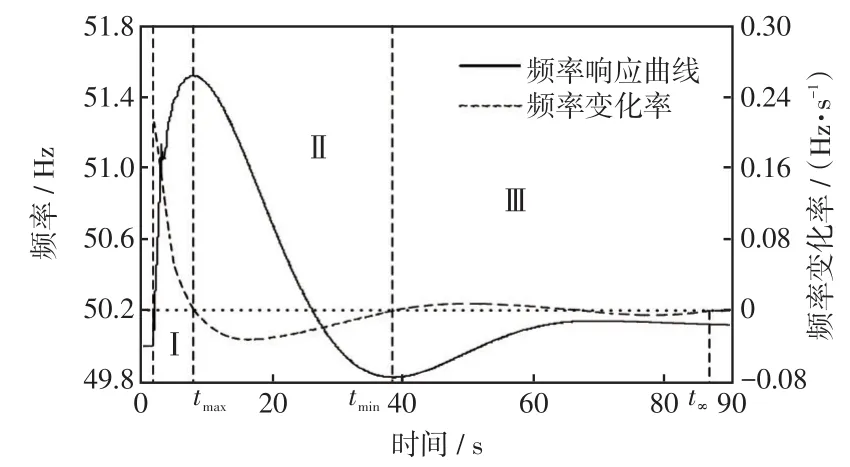
图2 系统频率响应阶段划分示意Fig.2 Schematic of division of system frequency response stages
2.2 评价高频切机方案实施效果的目标函数
对所划分的3个频率响应阶段,依据频率变化特点和影响因素的不同,构建了相应阶段的目标函数。
1)阶段I的目标函数
在阶段I,系统频率时域响应为一条单调上升曲线,最大值和变化率越小,对应的高频切机方案的实施效果越好。影响这些指标的主要因素包括该响应阶段的系统惯量水平与功率调节能力,因此定义系统平抑功率ΔPm来综合反映抵消故障功率过剩的能力,即

式中,ΔPG为机组一次调节随频率偏差的出力变化。
可以看出,系统平抑功率ΔPm在阶段I随系统频率偏差Δf和频率变化率dΔf/ dt的增大而不断增大;系统等值机组的涉频特性越好,即TJeq和KGeq越大,系统平抑功率水平越高,频率偏差及其变化率将越小。
考虑到高频切机动作通常是在阶段I完成,各轮次动作后系统等值机组的涉频参数会发生变化,也即系统的涉频特性参数仅在相邻动作轮次间保持不变,切机机组组合方式的不同使得相邻轮次间平抑功率增量存在差异。为了更合理地运用系统平抑功率来评价高频切机方案在阶段I下的实施效果,应分别计算各轮次动作之间的平抑功率增量并进行累加。因此,所构建的响应阶段I下的目标函数为

式中:u为切机方案的动作轮次;TJeqi为第i轮动作后系统的等效惯性时间常数;ΔPGi为第i轮动作后机组调速器出力改变量;ti为第i轮动作时刻。
2)阶段Ⅱ的目标函数
在阶段Ⅱ下,系统频率时域响应为一条单调下降的曲线。系统频率从最大偏差到最小偏差的最大跌落深度越小、所用的跌落时间越短,对应的高频切机方案的实施效果越好。本文采用综合考虑系统频率最大跌落深度和所用跌落时间同时最小来评价该阶段的实施效果。所构建的响应阶段Ⅱ下的目标函数为

式中:Δfmax和Δfmin分别对应系统频率偏差的最大值和最小值;tmax和tmin分别对应系统频率达到最大偏差和最小偏差的时间。
3)阶段Ⅲ的目标函数
在阶段Ⅲ下,系统频率将从最小偏差逐渐恢复至稳态频率。频率恢复至稳态值所用的时间越短,且恢复过程中围绕稳态频率的波动越小,对应高频切机方案的实施效果越好。为了兼顾阶段Ⅲ下缩短系统频率恢复时间及抑制频率波动的需求,可以用频率偏差时域积分绝对值的大小来评价该时段高频切机方案实施效果。所构建的响应阶段Ⅲ下的目标函数为

式中,t∞为频率达到稳态值的时间。
3 高频切机方案整定优化的数学模型
探求保障系统频率稳定的紧急控制措施的高频切机优化方案时,在满足频率稳定指标要求的前提下考虑高频切机方案的经济性及实施效果,同时还需要考虑与机组超速保护和低频减载等频率紧急控制措施的配合[12]。因此,针对高频切机机组组合优化问题,本文建立了相适应的数学模型。
1)目标函数
目标函数1:高频切机方案的总切机量最小,有

目标函数2:高频切机方案的实施效果最优,有

式中,βI、βⅡ和βⅢ分别表示频率响应阶段Ⅰ、Ⅱ、Ⅲ各子目标所占的权重,可通过线性加权评估法[12]确定。
2)约束条件
根据电力行业的系统暂态及稳态频率标准,以及机组超速保护等紧急控制措施的动作频率[13],所建立的约束条件为
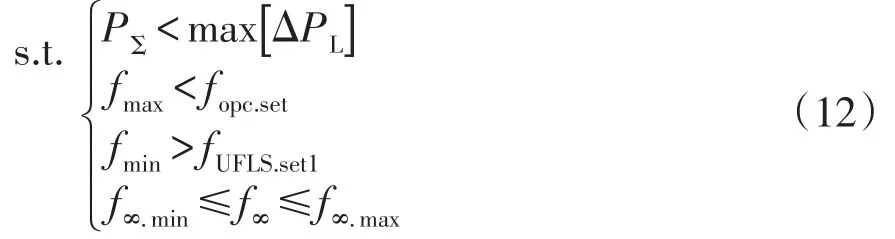
其中,约束条件1表示总切机量PΣ不得超过可能的最大过剩功率;约束条件2表示系统暂态频率最大值fmax不应高于机组超速保护动作值fopc.set;约束条件3表示暂态频率最小值fmin不应低于低频减载的第1级动作值fUFLS.set1;约束条件4表示系统稳态频率f∞应在允许的稳态频率上限值f∞.max和下限值f∞.min之间。
4 考虑机组涉频特性的高频切机方案优化
目前高频切机整定优化方法中,有的研究依据最严重故障情况确定的总切机量人为整定各轮次切机量,难以保证所有故障情况满足频率约束条件;有的研究没有考虑备切机组涉频特性差异对频率响应特性的影响,给出的切机方案不是最优的;还有的研究对整个暂态期间构建相同的优化目标函数,忽略了频率特性曲线在不同阶段下的影响因素和特征的差异,不能全面体现高频切机方案实施效果的优势。本文提出一种计及备切机组涉频特性差异的高频切机方案递进修正优化方法,高频切机方案的确定过程包括基于备切机组等容量模型替换的初始切机量整定和基于NSGA-Ⅱ算法递进修正切机量的高频切机机组组合优化。
4.1 基于备切机组等容量模型替换的初始切机量整定
考虑到备切机组涉频特性差异对系统频率响应的影响,为了有效解决备切机组涉频特性差异及切除顺序不同对切机量整定的影响问题,本文采用将备切机组等容量模型替换的方式,即将系统等效模型中的备切机组等容量替换为常规新能源机组(出力稳定且不响应系统频率的变化),形成等容量替换模型。由于等容量替换模型降低了等值惯量水平和频率调节能力,基于该模型整定的初始切机量是保守的,使得实际模型在不同故障情况下系统频率特性能够满足约束的同时还留有一定的裕度。初始切机量的整定步骤如下:
步骤1设定切机方案动作轮次u次、各轮次动作频率fi和动作延时td.i,i=1~u;
步骤2将系统中可能出现的故障情况按过剩功率由小到大排序,形成故障集,并将备切机组按额定容量由小到大进行排列,形成备切机组集合;
步骤3按照故障集顺序进行仿真计算,记录系统频率响应曲线最大值fmax刚好不超过第(i+1)轮次动作频率的故障序号为Fi,对应的过剩功率为第i轮切机动作所适应的最大过剩功率ΔPmax.i,i=1~u;
步骤4调整切机量,使第i轮动作后,所有故障序号不超过Fi的故障情况下的频率特性曲线都满足频率稳定约束。记录第i轮次切机量为ΔPtrip.i,i=1~u。
4.2 基于NSGA-Ⅱ算法递进修正切机量的高频切机机组组合优化
在高频切机机组组合优化数学模型的基础上,采用NSGA-Ⅱ算法对高频切机机组组合多目标优化问题进行求解。本文以总切机量最小和高频切机实施效果最优为目标进行优化,由最优折衷解得到的高频切机方案实现了对两个目标的兼顾。总体优化流程如图3所示。

图3 高频切机方案整定优化流程Fig.3 Optimization process of setting of over-frequency generator tripping scheme
高频切机方案整定的目的是优化出各轮次动作机组的组合,所以本文给出的遗传染色体是待切机组的动作顺序组合,而且采用十进制整数编码来反映备切机组的动作轮次,编码方式为

式中:k为备切机组台数;Otr.1~Otr.k分别为对应备切机组的动作顺序编码,表示为

当Otr.i=0时,表示编号为i的备切机组不参与切机方案;当Otr.i=j时,表示编号为i的待切机组参与切机方案的第j轮动作。
寻找高频切机方案的优化过程是通过对实际模型仿真计算而逐代演化的,在NSGA-Ⅱ迭代过程中,通过交叉变异操作随机生成的子代个体切机方案总切机量将发生变化,可能不同于初始切机量。由前面分析可知,用等容量替换得到的初始切机量应用于实际系统时是有一定裕量的,为了高频切机方案的经济性目标,交叉变异操作应满足以下原则:
(1)交叉操作生成的子代个体总切机量应等于亲代,二者仅机组组合方式不同;
(2)变异操作生成的子代个体总切机量应小于亲代。
基于上述原则通过交叉变异操作可以实现子代个体切机方案总切机量的逐代修正,步骤如下:
步骤1根据等容量替换模型与实际模型的涉频特性差异,确定初始切机量方案的总切机修正量;
步骤2根据各轮次初始切机量与在实际模型中适应的最大过剩功率的差值,将总切机修正量分配到各动作轮次,确定各轮次的切机修正量最大范围;
步骤3执行变异操作时,在各轮次的切机修正量范围内,用小容量机组替换亲代个体中的备切机组进行个体切机量修正,若满足频率约束则该个体将作为子代个体。
5 仿真分析
图4为含新能源的区域电网接线图,系统可能出现的故障情况及相应过剩功率如表1所示。本文对高频切机方案递进修正优化方法进行了仿真,并与文献[3]的整定方法进行了对比分析,以验证所提方法的优势。
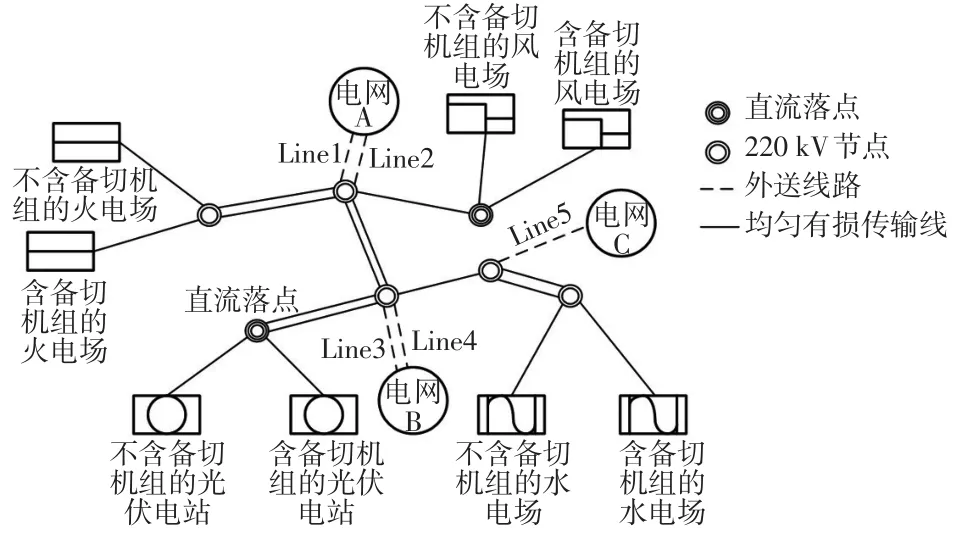
图4 区域电网接线图Fig.4 Wiring diagram of regional grid
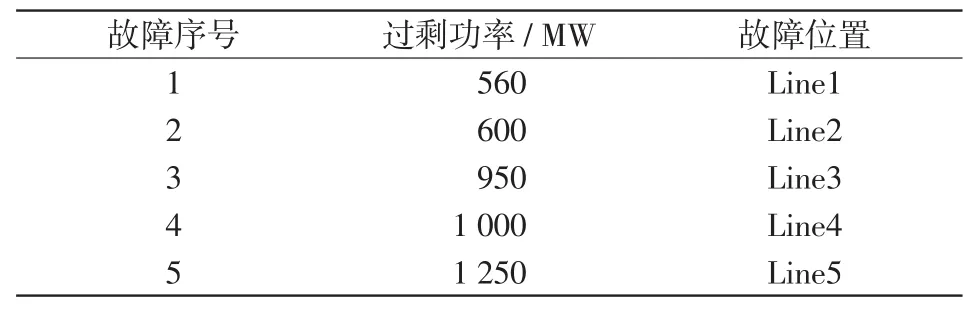
表1 区域电网故障Tab.1 Faults in regional grid
5.1 初始切机量的整定计算
按照工程经验给定切机方案动作轮次、各轮次动作频率及动作延时,并用备切机组等容量模型替换的方式,整定出的各轮次初始切机量和相应的最大过剩功率,如表2所示。

表2 初始切机量方案及相应的最大过剩功率Tab.2 Initial generator tripping scheme and the corresponding maximum excess power
5.2 高频切机机组组合优化结果
依据所确定的初始切机量生成NSGA-Ⅱ算法的初始种群,种群规模设置为24,频率响应曲线各时间区段评价指标的线性加权值βⅠ、βⅡ和βⅢ分别为0.3、0.3和0.4。通过基于NSGA-Ⅱ算法对高频切机机组组合方案进行递进修正优化,得到的Pareto最优解集如图5所示,由其最优折衷解可得高频切机机组组合方案。
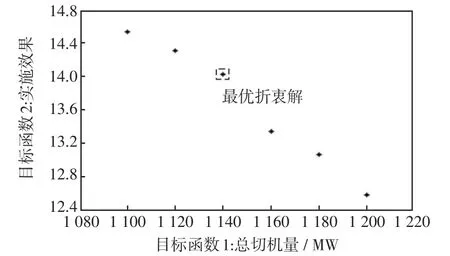
图5 二维空间Pareto最优解集前沿Fig.5 Frontier of Pareto optimal solution set in twodimensional space
实际上,在寻优的迭代过程中,每一代产生的非支配解集都有对应的最优折衷解,也分别对应两个目标函数。最优折衷解目标函数随迭代次数的变化如图6所示。图6(a)目标函数1所代表的高频切机方案总切机量随迭代次数的变化情况,图6(b)目标函数2所代表的高频切机方案实施效果随迭代次数的变化情况。从图6(a)可以看出,总切机量经过7代修正,由初始切机量1 200 MW逐渐减小至1140MW,证明了基于NSGA-Ⅱ优化算法递进修正切机量方法的有效性。从图6(b)可以看出,评价高频切机方案实施效果的目标函数2的计算值总体呈逐代减小,同样证明了本文所提优化方法的有效性。

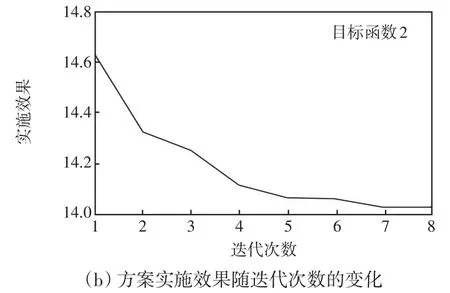
图6 最优折衷解目标函数随迭代次数的变化Fig.6 Changes in objective functions of optimal compromise solution with the number of iterations
5.3 高频切机方案对比分析
本文还与文献[6]所述整定方法进行了仿真对比,得到的两种高频切机方案示于表3中,过剩功率最严重故障情况下的系统频率特性曲线如图7所示。由表3可知,在切机方案的动作轮次、动作频率及动作延时相同的前提下,采用本文方法得到的高频切机机组组合方案,其总切机量为1 140 MW,相较于文献[6]的总切机量1 180 MW,减少了40 MW,提高了高频切机方案的经济性;另一方面,由图7可见,本文方法的高频切机方案作用下的频率响应曲线,暂态频率的最高值为51.23 Hz,频率的跌落深度为1.47 Hz,恢复至稳态频率的时间为88 s,对应计算的目标函数2为obj2=14.027;而文献[6]方法的高频切机方案作用下的频率响应曲线,暂态频率的最高值为51.48 Hz,频率的跌落深度为1.70 Hz,恢复至稳态频率的时间为90 s,对应计算的目标函数2为obj2=15.050,说明用本文方法优化出的高频切机方案实施效果更优。

图7 高频切机方案的实施效果对比Fig.7 Comparison of implementation effect between different over-frequency generator tripping schemes
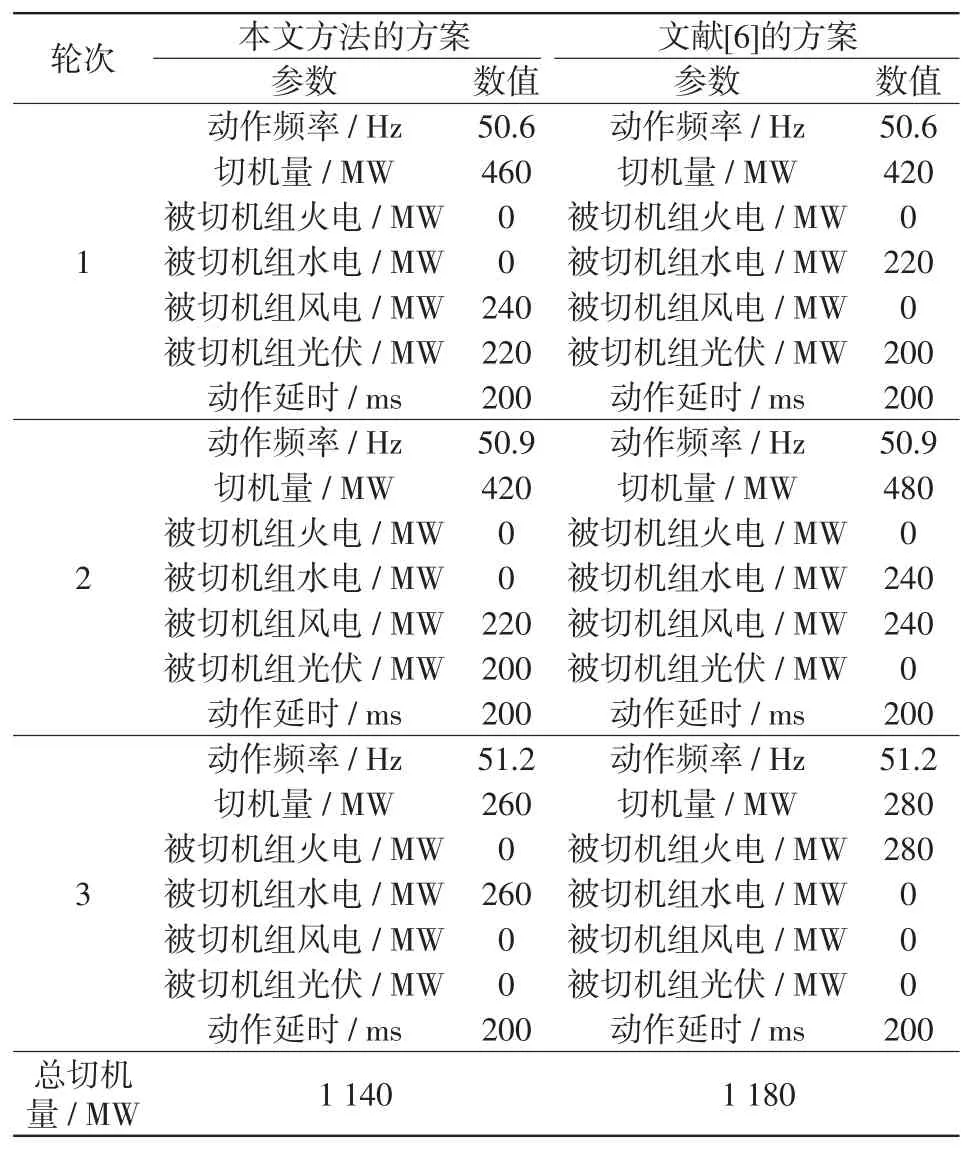
表3 高频切机方案的对比Tab.3 Comparison between different over-frequency generator tripping schemes
6 结论
(1)采用备切机组等容量模型替换的方法整定初始切机量,可以避免备切机组涉频特性差异及切除顺序不同对切机量整定的影响。
(2)构建了评价频率响应不同阶段下高频切机实施效果的目标函数,体现了备切机组涉频特性差异与系统高频响应特性的关联性.。
(3)基于NSGA-Ⅱ的高频切机机组组合递进修正优化方法,兼顾了高频切机方案的经济性和实施效果,在实际应用中具有更强的优势。