基于背景差分法的电网巡检运动目标检测技术
2023-02-09应国德浦正国
廖 逍,张 弛,应国德,浦正国
(1.国家电网信息通信产业集团有限公司 a.信通研究院,b.安徽继远软件有限公司,北京 102211;2.国网浙江省电力有限公司 台州供电公司,浙江 台州 318001)
随着我国电网的大规模建设与发展,输电线路覆盖区域地形复杂、环境恶劣,对于线路的运维提出了更高的要求[1].传统的人工巡检方式不仅效率低下,且易受到地形和外部条件的各种限制[2-3].无人机巡检作为一种新兴的技术手段,由于其巡检范围广、操作简单、灵活性高等多种优势,其在电力巡检工作中得到了广泛应用[4-5].
图像识别与目标检测技术是无人机巡检的技术基础,国内外相关学者对此开展了广泛的研究[6-8].向涛等[9]利用随机森林算法,提出了一种能够满足图像外观变化的目标检测技术;陈振学等[10]利用小波变换获得图像的局部特征信息,并利用视觉转移机制提升图像目标检测的准确率;许冰等[11]建立动态场景下的目标显著性模型,并利用漂移聚类算法实现了对复杂场景下的目标检测;唐聪等[12]采用多视窗的SSD方法,提高了目标检测的物体搜索能力和物体检测精度;李成美等[13]结合Shi-Tomasi角点检测技术和光流法及运动目标的归一化处理,实现了在PC平台和嵌入式平台下的运动目标检测.
现有研究多是基于静态场景复杂背景下的目标检测[14-15].无人机巡检属于一种动态场景下的目标检测,为了实现动态背景下的目标检测,在运动估计的基础上对视频图像进行背景补偿,以实现运动目标的准确检测.基于背景差分法高斯模型,通过降维和局部匹配的方式对SIFT特征点提取技术进行优化,解决了参数更新和稳定性匹配问题,增强了算法的抗干扰能力.
1 背景补偿
无人机巡检属于动态场景下的目标检测,由于镜头运动导致图像背景运动存在于整个视频范围内,因此,需要对运动背景进行补偿,即将动态场景转换为静态.本文建立了镜头运动的数学模型,然后通过寻找前后帧之间相匹配的特征点求解模型参数,从而完成背景补偿.
1.1 运动模型
传统用于描述图像变换的仿射模型只能对平面图像进行映射,但无人机的运动是在整个三维空间内进行的,所以本文从参数模型的角度建立了双线性模型,用于表征镜头运动引起的全局运动矢量,其表达式为
(1)
式中:(x,y)为像素点坐标;(u,v)为x方向和y方向的运动量;m0~m7为待求解的参数.通过寻找第t帧图像上像素点和与之对应的第t+1帧图像上像素点的坐标,即可建立方程求解得到参数m.
理论上,只要有4个匹配点,即可求得两帧图像之间的映射关系.但一般通过计算机处理得到的匹配点数目通常大于4个,因此需要采用最小二乘法求解镜头运动的最优参数解,从而对其全局运动进行估计.
1.2 特征点提取
尺度不变特征变换算法(SIFT)是一种广泛应用于全局特征匹配的图像特征点提取算法.本文采用SIFT特征提取算法对图像进行处理,算法可分为4个步骤,分别为:极值检测、确定特征点、特征点方向确定及特征向量的生成.
1)极值检测.使用SIFT进行特征点提取时,需要建立图像的尺度空间,其表达式定义为
L(x,y,σ)=G(x,y,σ)P(x,y)
(2)
式中:σ为均方差;P(x,y)为(x,y)处图像灰度值;G(x,y,σ)为高斯核函数.
极值检测算子用于检测尺度空间内的特征点,定义表达式为
D(x,y,σ)=[G(x,y,kσ)-G(x,y,σ)]P(x,y)=
L(x,y,kσ)-L(x,y,σ)
(3)
式中,k为两个相邻尺度间的比例因子.对于第n层尺度空间上的一个检测点(x,y),当判定该点为极值点时,则该极值点为特征匹配点的候选.

3)特征点方向.以特征点为中心,分别计算其邻域内各点梯度的大小与方向,即
m={[L(x+1,y)-L(x-1,y)]2-
[L(x,y+1)-L(x,y-1)]2}1/2
(4)
(5)
以10°为一个区间划分,将特征点邻域内各点梯度值乘以高斯权重并进行求和,最大值所在的角度区间即为该特征点的方向.至此,即可确定关键点的位置、尺度和方向.
4)特征向量.为了增强匹配的稳定性,每个特征点的邻域以自身为中心,由16×16个采样点组成.16×16的采样点又可分为16个4×4的区域,每个区域可由一个种子点进行表征,每个种子点可设置8个方向,最终每个特征点即可形成128维的SIFT特征向量.
相邻两帧图像特征点生成后,即可确定特征匹配点.由特征匹配点可求得两帧图像之间的变换关系,从而完成图像背景的补偿.
2 背景差分法
完成背景补偿后,即可将动态场景转换为静态场景,进而采用背景差分法完成运动目标检测任务.背景差分法利用当前图像与背景图像之间的差分,能够简单、快速地完成对运动目标的检测.本文在分析了传统高斯模型的背景差分法后,对其完成进一步的优化以满足实际使用的需求.
2.1 高斯模型
基于高斯模型的背景差分法是一种以统计学原理为基础的运动目标检测方法,该方法首先需要为视频图像的每个背景像素点建立初始高斯模型η(p,μ0,σ0),其中,p为像素点(x,y)像素值,μ0为初始像素均值,σ0为初始像素均方差.初始像素值和均方差可通过计算T时间段内的图像得到.假设某时间段内视频中共有N帧图像,则μ0与σ0可以表示为
(6)
(7)
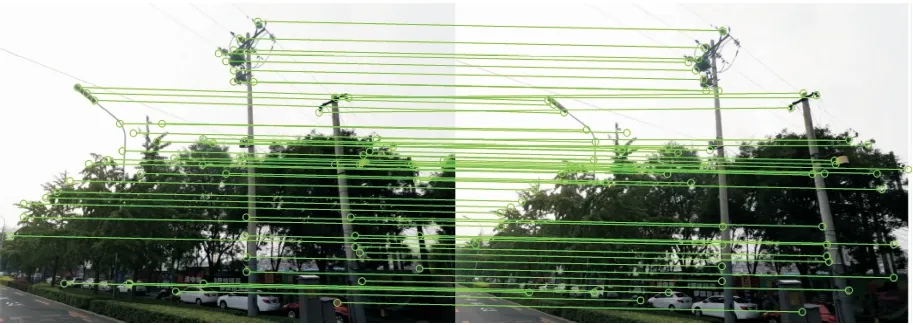
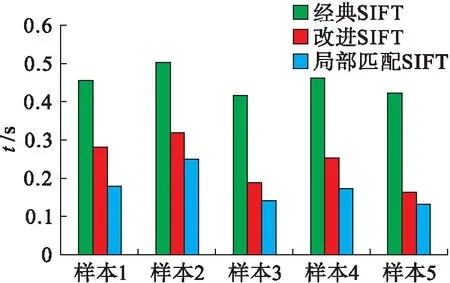
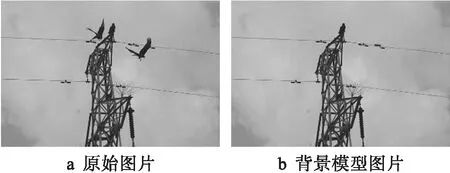
由概率论相关理论可知,随机变量X服从正态分布时,在区间(μ-3σ,μ+3σ)内的概率为0.997 4,即可认定X落在区间(μ-3σ,μ+3σ)外的事件不会发生.对应于视频图像的高斯模型,阈值变量Th在满足2 2)装卸。新鲜果蔬鲜嫩,含水量高,如装卸搬运中操作粗放、野蛮,就会导致商品机械损伤、腐烂,造成巨大的经济损失。我国果品蔬菜多为人工装卸搬运,其劳动强度大,机械伤严重。装卸时要求箱子要捆实扎紧,搬运要轻拿轻放,快装快运。 视频图像始终处于一个动态场景,因此需要对其进行更新.高斯分布的均值和方差是决定高斯曲线形状的两个关键参数,故基于高斯模型的背景模型更新即是对各像素点均值和方差参数的更新.引入高斯模型的更新参数a,对高斯模型参数进行表达式更新为 μt+1=(1-a)μt+apt (8) (9) 通过对高斯模型的更新,可以使其适应视频图像的背景变化,与实际背景相匹配.由高斯背景模型即可判断各像素点是背景点还是运动目标点,从而完成对运动目标的检测. 实际视频图像的背景较为复杂,除了会发生明显的运动外,还受多种因素的影响.实际应用过程中,可以从更新率的选择和更新策略的改进两方面对高斯模型进行优化. 高斯模型的均值和方差决定了高斯曲线的形状.当高斯模型的均值和方差采用统一的更新速率进行更新时,难以做到更新速度与模型稳定性之间的匹配.因此对高斯模型的均值赋予较大的更新速率,以提高模型的更新速度和收敛性.对于方差则采用分段更新的方式,即模型训练初期采用较大的更新率以提高收敛性;模型训练后期采用较小的更新速率以维持稳定性. 对于更新策略的优化,需要考虑前景和背景的转化问题:1)镜头中存在运动目标时,随着目标的移动会发生前景和背景区域的转化;2)运动物体运动状态的变化也会导致前景和背景的转化. 高斯模型还要有较强的抗干扰能力,需要在高斯模型的更新过程中剔除运动物体的像素点,仅保留背景点参与更新.同时还需要考虑到运动目标的运动状态发生变化时,对物体的运动状态进行判断,决定是否参与更新.优化后高斯模型更新策略表达式为 (10) (11) 式中:aμ与aσ分别为均值和方差的更新速率;Cn为帧计数器,用于判断像素点是否需要参与更新,初始值为0.若该点为背景点,则Cn置0并对其进行更新;若该点为前景点,则Cn加1并与帧计数器的阈值Cn0进行比较.当Cn 实验采用分辨率为1 080×1 920机载相机拍摄得到的图片来检验算法性能.硬件仿真平台为Intel Core i7处理器,开发环境为Windows 10操作系统,VS2015编程环境. 本文选择巡检过程中5段典型样本视频对其进行目标检测分析.每段视频样本时长为20 s,拍摄帧率为30帧/s,即每个样本约600帧画面.其中:样本1为无人机起飞过程中的视频片段;样本2为无人机正常巡检的视频片段;样本3和4为巡检过程中发现漂浮搭挂物的视频片段;样本5为鸟类在线路杆塔附近活动的视频片段. 对样本1中的图像进行特征点提取,共得到435个特征点.对相邻帧进行特征点的匹配,共有153对匹配点,匹配结果如图1所示. 图1 SIFT特征点匹配结果 在特征点提取过程中发现,采用上述方法对图像进行处理时,耗时量较大,图像处理效率较低,上述方法存在一定的局限性. SIFT在特征点提取过程中每个特征点需要128维向量对其进行描述,对于本文而言这些向量有一定程度的冗余,因此文中选择以特征点为中心的8×8个区域作为采样点,将该区域分成4个4×4的子区域,这样每个特征点即可由2×2共4个种子点组成,每个种子点有8个方向的信息量,即每个特征点生成4×8维的特征向量.优化后SIFT每个特征点的特征向量数目减少了3/4. 采用优化后的SIFT对样本图像进行特征点的提取与匹配,结果如图2所示,共得到424个特征点,124对匹配点.可以看到,优化后的特征点位置基本处于优化前特征点的覆盖范围之内,降低维数后仍可满足实际工作的需求. 图2 优化后的SIFT特征点匹配结果 采用优化后的SIFT对样本片段进行处理,统计特征向量的生成时间后发现:对于不同的样本,特征向量的生成时间是原来的30%~40%,结果如图3所示.虽然优化后匹配特征点有所减少,但本文只需估算8个背景运动参数,这些特征点完全可以满足需要,可以通过降低维数的方法缩短特征提取时间. 图3 特征向量生成时间比较 SIFT特征匹配算法是通过全局匹配的方式来寻找匹配点.采用该算法需要在全局范围内寻找匹配点,耗时较多,因此本文采用局部匹配的方式以缩短运算时间. 假设第t-1帧图像中特征点的集合为Pt-1={Pt-1,1,Pt-1,2,…,Pt-1,N}.对于每一个特征点Pt-1,n,在以点Pt-1,n为中心的邻域内,搜索符合条件的特征点集,并对其进行匹配.以测试样本为例,对相关匹配算法运行时间进行比较分析,结果如图4所示. 图4 提取特征点时间比较 由图4可知,采用局部匹配算法后可以进一步提升系统的运行效率.局部匹配算法与经典SIFT算法相比,提取特征点的总时间是原来的30%~50%.改进SIFT算法可以缩短20%~30%的时间,这对于进一步提高算法的运行效率具有重要意义. 由目标检测结果可知,移动镜头下的视频图像若不采用运动估算的方式加以纠正,则检测结果中会出现大量阴影和误检的情况,从而难以满足实际工作的需求.如图5所示,无人机在巡检过程中发现杆塔顶端悬挂了明显的漂浮物,在风力的作用下发生抖动,对线路安全造成威胁.未进行背景补偿时检测效果较差,图像背景会对检测目标产生较多干扰. 图5 目标检测结果比较 样本图片中,无人机巡检过程中发现杆塔周围有活动的鸟类.鸟类既是运动目标,但也是干扰目标.图6为本文提出的背景补偿和背景差分法建立的背景模型与原始图片的比较.可见所提算法具有较好的抗干扰能力. 图6 原始与背景模型图片比较 本文研究了无人机电网巡检中移动镜头的目标检测方法,得出主要结论如下: 1)利用SIFT特征提取技术实现对视频图片特征点的提取.在此基础上,结合无人机运动模型完成对场景的运动估算,从而实现背景补偿. 2)通过特征向量降维和采用局部匹配的方法对SIFT算法进行优化,使其特征向量生成时间缩减为原来的30%~40%.与经典SIFT算法相比,局部匹配算法提取特征点的总时间仅为原来的30%~50%. 3)利用背景差分法对运动目标进行检测,移动镜头下的视频图像采用背景补偿后可以消除阴影和误检,能够明显提高运动目标检测的准确率.2.2 改进高斯模型
3 实验结果分析
3.1 特征点提取


3.2 目标检测

4 结 论
