四维坐标系下并网型光伏微电网故障区域判定技术
2023-02-03李洪涛马永亮
李洪涛, 马永亮
(1.国网河北省电力有限公司正定县供电分公司,河北 石家庄 050800;2.天津天大求实电力新技术股份有限公司,天津 300380)
0 引 言
并网型光伏微电网中,接入较多的光伏电源,令微电网由辐射型单端送电拓扑结构,转换成多端送电拓扑结构,导致微电网内潮流方向不一致[1],微电网容易出现故障。在微电网出现故障的情况下,电流波动的幅度较大,增加电流保护整定难度,不能判定故障区域[2-4]。为解决光伏电源接入后引起的问题,需优化一次能源结构,其中,解决这些问题的关键是故障区域判定。朱愉田等[5]利用约束条件提取微电网故障特征,输入深度强化学习网络,完成微电网故障信息跟踪,采用三端行波测距法,判定故障区域。孟子超等[6]通过迁移学习改进卷积神经网络(CNN),构建基于迁移学习的CNN,在该网络内输入微电网故障信息,输出故障区域判定结果。但这两种技术只是从功率变化或者故障电流方向判断故障区域,判断单一故障时无法相互验证,划分精度较差。由于上述方法均未考虑微电网并网后同时接入新能源和传统能源,必然会出现多重故障情况,在微电网中出现多重故障时,无法精准判定故障区域,不能实现故障隔离。
四维坐标系下微电网信号传输过程中,可在四个维度中同时改善节点间的最小欧式距离[7],在不损失谱效率的同时,加快信号渐进功率效率,提升信号传输效果,利于后续微电网多重故障区域判定。为此,研究四维坐标系下并网型光伏微电网故障区域判定技术,精准判定各种故障时的微电网故障区域。利用球填充四维坐标点集的集合划分方法,有效划分微电网拓扑结构,提升信号传输效果;通过图论算法构建微电网故障数学模型,依据故障前后功率变化量、区域故障电流方向以及划分区域和边界的关联,互相验证下建立故障区域综合判定矩阵,实现多重故障区域判定。
1 并网型光伏微电网故障区域判定技术
1.1 四维坐标系下并网型光伏微电网区域划分
利用球填充四维坐标点集的集合划分方法,划分并网型光伏微电网区域,将并网型光伏微电网拓扑结构看成一个四维坐标图,微电网内各设备节点看成坐标点。四维坐标点集合划分即并网型光伏微电网区域划分依据共包含两个方面,分别是坐标点间的最小欧式距离与坐标点集的平均最近邻坐标点数量。
在加性高斯白噪声并网型光伏微电网通信内,四维坐标系下微电网接收信号是环绕发送信号服从每向同性分布的[8],即在不同方向中,接收信号偏离发送信号的概率为一致的。在最大似然接收信号情况下,通过接收信号和参考坐标点之间的欧氏距离判断符号正负。
预测误符号率S上限的表达式如下:
(1)
式中:α为并网型光伏微电网的相位常数;N0为微电网的空间维度;X为微电网内坐标点数量;dkl为欧式距离。
高信噪比情况下,可将S近似成:
(2)
式中:Xmin为微电网内距离dmin的坐标点个数;γ为微电网的渐进功率效率和传输距离间的关系;Eb为微电网的平均比特能量。
通过式(2)可知,微电网内坐标点间的dmin会影响S,dmin的坐标点数量Xmin也会影响S。

(3)
步骤1,排序不同坐标表达式ζ(±a,±b,±c,±d)的坐标点集,即并网型光伏微电网节点,排序方式为依据与原点的d从小至大分层排序,如果d一致,那么将这些坐标点集放在邻近层[10-12],意味着每层中仅存储一个ζ的坐标点集,同时令接近原点的层次为低层。
步骤2,划分首层坐标点集,获取d空间分布相同的8个区域,先将原点对称的坐标点对(a,b,c,d)与(-a,-b,-c,-d)划分至同一区域内。
步骤4,依据由低至高的顺序,依次划分其余层次的坐标点集,划分方式同首层,划分完成后和低层完成划分的八个区域依据步骤1进行排序组合,再依据步骤3在全部区域组合内选择最佳的划分结果。
步骤5,反复操作步骤4,以全部层次划分结束为终止条件,获取最佳并网型光伏微电网拓扑结构划分结果,得到八个划分区域。
并网型光伏微电网拓扑结构经过划分后,可扩大坐标点间的最小欧式距离,减少平均最近邻坐标点数量,降低微电网信号传输的误符号率[13],提升信号传输效果,为后续微电网故障区域判定提供帮助。
1.2 并网型光伏微电网故障区域判定的实现
1.2.1 构建并网型光伏微电网故障数学模型
利用图论算法构建并网型光伏微电网故障数学模型,将第1.1小节划分出的区域O={O1,O2,O3,O4,O5,O6,O7,O8}当成有向图的节点,断路器U={u1,u2,u3,u4,u5,u6,u7}当作有向图的边,并网型光伏微电网拓扑结构当作有向图D=〈VU〉。将D内边方向当成流过断路器电流即故障电流的参考方向[14]。
令D的增广关联矩阵是G(D)=(gij)n×(n-1),节点编号是n,边即故障支路是n-1,gij的表达式如下:
gij=
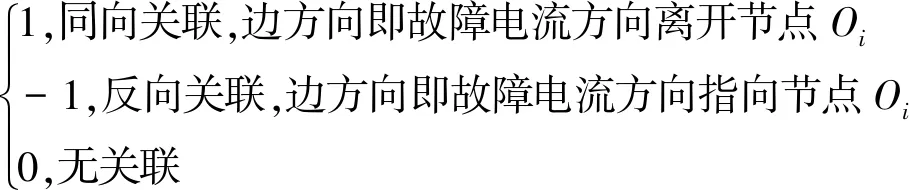
(4)
按照基尔霍夫电流定律可知,每个节点中的n阶综合相电流是IΣ=(GIu)n,Iu=[i1i2…ig…in-1)T,边ug的相电流是ig。
每个节点位置的综合相功率是P=(VIΣ)n,令并网型光伏微电网中每个节点的电压V一致,则P与IΣ具有正相关关系。
并网型光伏微电网中G(D)无法描绘断路器的状态,邻断路器对角矩阵是B(D)=(bij)n-1,将其当成边状态即故障电流状态的描述模型,B(D)内的对角线元素如下:

(5)
利用检测并网型光伏微电网故障前后功率变化量ΔP,边方向即故障电流方向是否同向,以及划分区域O和边的关联,判断该区域内是否存在故障,将树的基本划分区域矩阵Oij当成并网型光伏微电网故障信息模型,该矩阵属于n-1阶故障划分区域信息矩阵O(D)=(Oij),Oi的方向是故障电流方向,表达式如下:
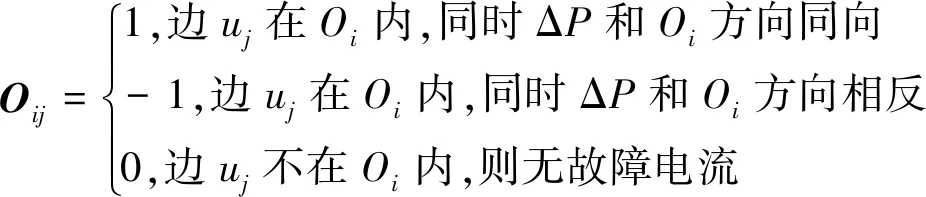
(6)
式中:Oi为故障电流方向;uj为故障支路。
如果某划分区域Oi内包含故障电流,同时ΔP和Oi方向同向,那么保护从机向保护主机发送信号1,如果ΔP和Oi方向相反,那么发送信号-1;如果未检测到该划分区域内存在故障电流,那么发送信号0。
引入邻接矩阵乘法,将增广关联矩阵G(D)、邻断路器对角矩阵B(D)与n-1阶故障划分区域信息矩阵O(D)相乘,不断匹配根据故障过流及方向信息,获取并网型光伏微电网故障区域判定矩阵H(D)=O(D)·G(D)·B(D), 整个过程是有向的。
1.2.2 并网型光伏微电网故障区域判定准则
获取并网型光伏微电网故障区域判定矩阵后,按照以下判定准则,完成故障区域判定,判定准则如下:
(1) 在Hii(D)=1情况下,对于全部的Hji(D)=1的j(j≠i)均存在Hjj(D)=0或Hjj(D)=-1,那么判定故障区域为i与j之间,说明i点对应的ΔP和Vi方向同向,存在正向故障电流,j点在i点正方向上,同时j与i直接连接,j不存在故障电流,代表i与j区域存在故障。
(2) 在Hii(D)=-1情况下,对于全部的Hji(D)=1的j(j≠i)均存在Hjj(D)=0,那么判定故障区域为i与j之间,说明i点对应的ΔP和Oi方向相反,存在反向故障电流,i点连接在j点正方向下的下方,同时j点未出现故障电流,代表i与j区域存在故障,同时电源处于i点下游。
(3) 在Hii(D)=1情况下,如果全部的Hij(D)=0(i≠j),那么判定i是末端节点,同时末端区域存在故障,说明i点对应的ΔP和Oi方向同向,存在正向故障电流,并网型光伏微电网正方向下不存在与i直接连接的节点,代表i是末端节点,同时末端区域存在故障。
通过上述判定准则完成并网型光伏微电网故障区域判定。
2 试验分析
通过PSCAD/EMTDC仿真软件建立并网型光伏微电网模型,该并网型光伏微电网系统的电压等级是380 V,以T-N接线方式进行微电网各设备间的连接,该微电网内共包含3条线路,长度一致,均是170 m,线路阻抗是0.524 Ω/km,线路1中连接重要负荷,其中分布式光伏电源为一个,线路2、3中连接可中断负荷,其中分布式光伏电源均为2个,每条线路首端与末端均各设置一个保护装置,记作保护1、保护2,且各分布式光伏电源出线位置均设有保护装置。并网型光伏微电网具体拓扑结构示意图如图1所示。
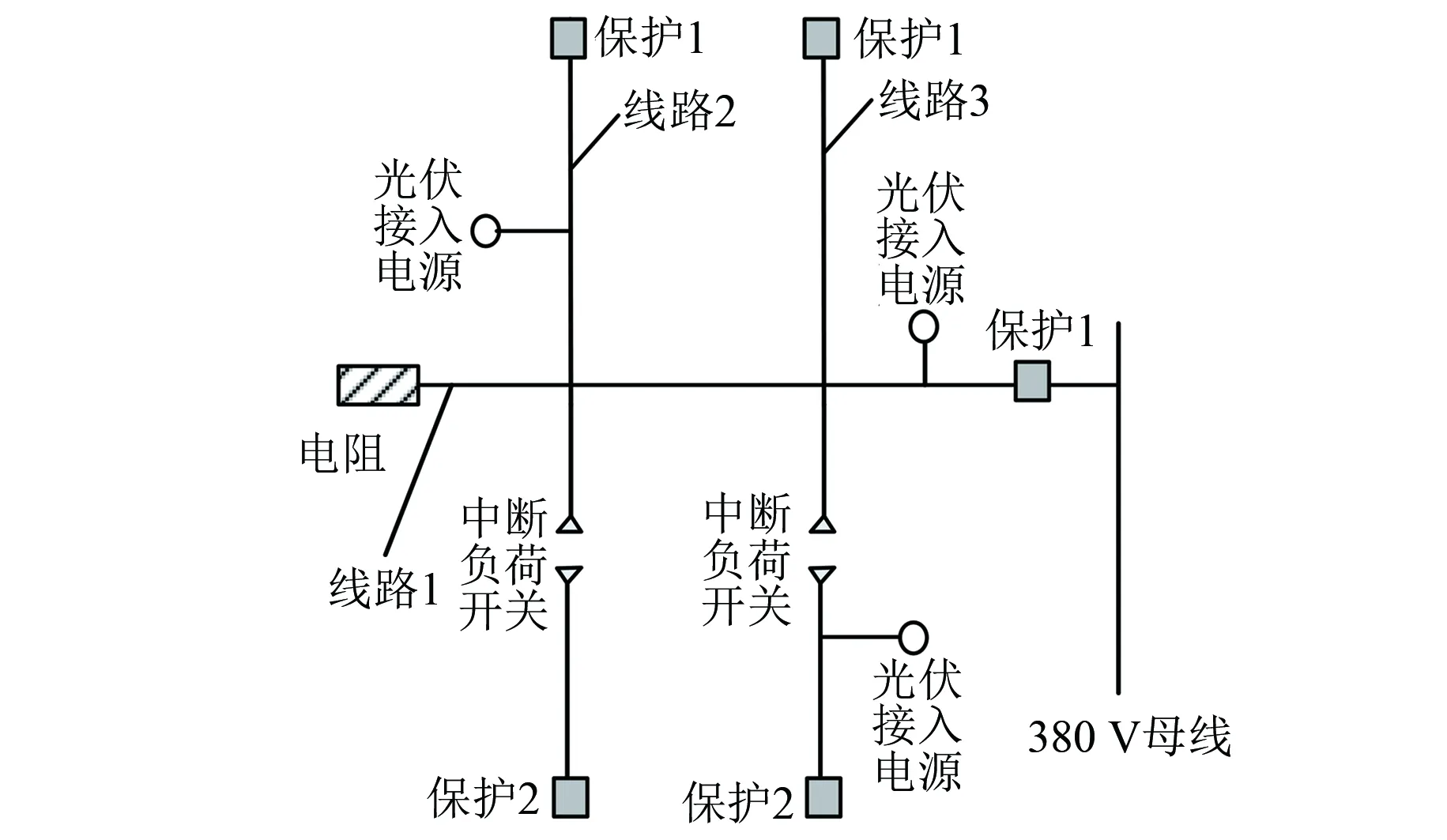
图1 并网型光伏微电网拓扑结构示意图
试验中为三条线路各设置一种故障,分别是闭环运行过程中出现多重故障、微电网内部出现两相故障、微电网系统侧发生故障。
利用本文技术划分该并网型光伏微电网的每条线路的拓扑结构,各获取8个区域,将三条线路微电网拓扑结构当成一个四维坐标图,四维坐标图的区域划分结果如表1所示。
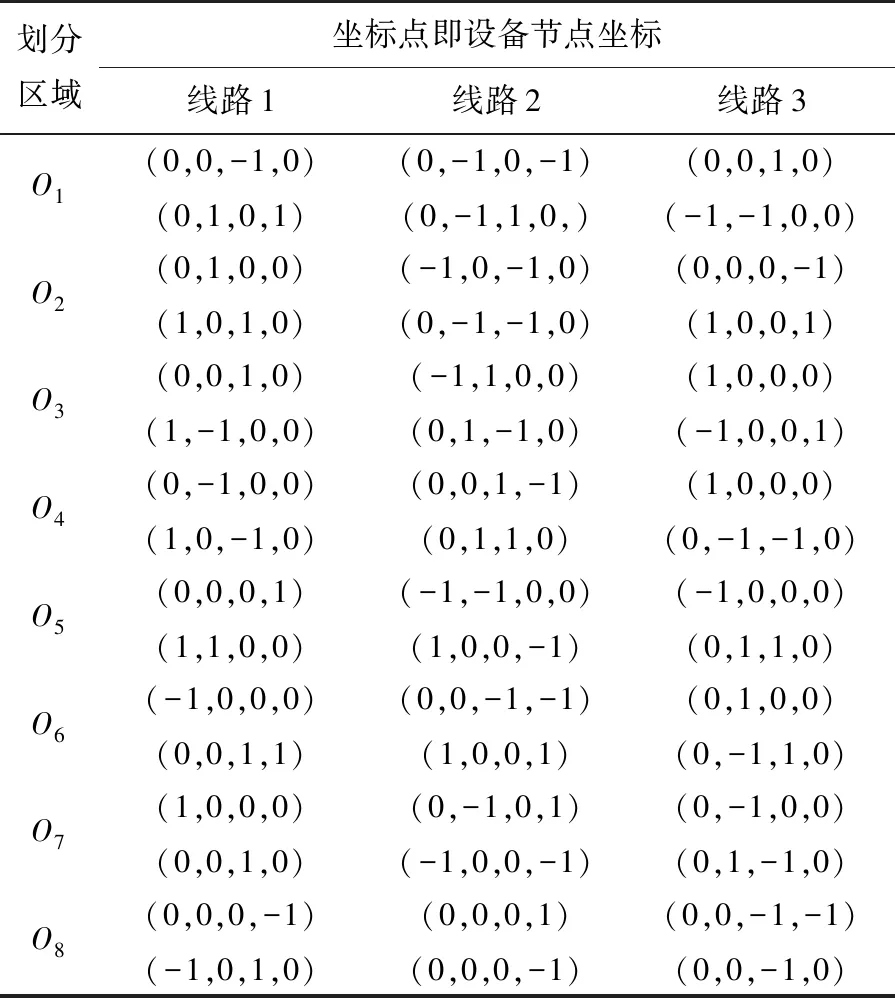
表1 划分结果
本文四维坐标系下区域划分的依据是最小欧式距离,与平均最近邻坐标点数量,且坐标点间最小欧式距离越大、平均最近邻坐标点数量越少,微电网内信号传输的误符号率越小,即信号传输效果越好。三条线路划分前后坐标点间的最小欧式距离与平均最近邻坐标点数量的改善情况如图2所示。
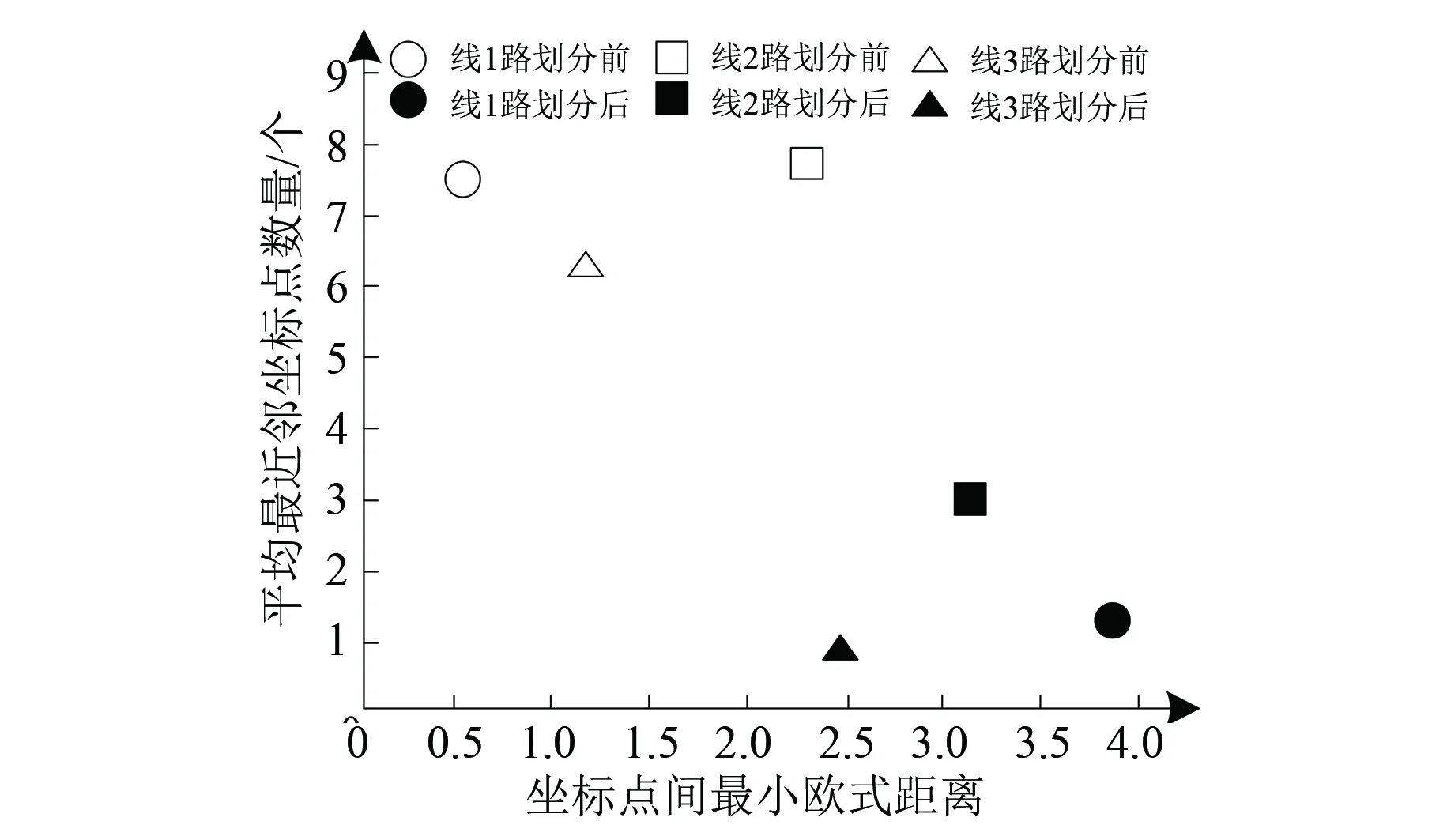
图2 三条线路划分前后的改善情况
综合分析表1与图2可知,本文所提判定技术可有效划分四维坐标系下,并网型光伏微电网三条线路的拓扑结构,每条线路均会划分成八个区域,同时三条线路划分后的坐标点间最小欧式距离均明显大于划分前,平均最近邻坐标点数量均明显低于划分前,说明本文技术划分三条线路后,最小欧式距离与平均最近邻坐标点数量均有所改善,有效降低微电网内信号传输的误符号率,提升信号传输效果。试验证明,所提判定技术可有效划分四维坐标系下,并网型光伏微电网各条线路的拓扑结构,划分后微电网内最小欧式距离与平均最近邻坐标点数量均有所改善,有效提升了微电网信号传输效果。
2.1 线路1闭环运行过程中出现多重故障
将划分后的八个区域当成八个节点,当并网型光伏微电网线路1处于闭环运行状态,同时出现多重故障情况下,线路1中各节点的三相电流变化情况如图3所示。
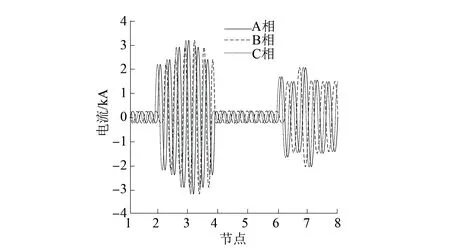
图3 多重故障的三相电流变化情况
利用本文所提判定技术构建线路1的故障区域判定矩阵Hl1,具体如下:
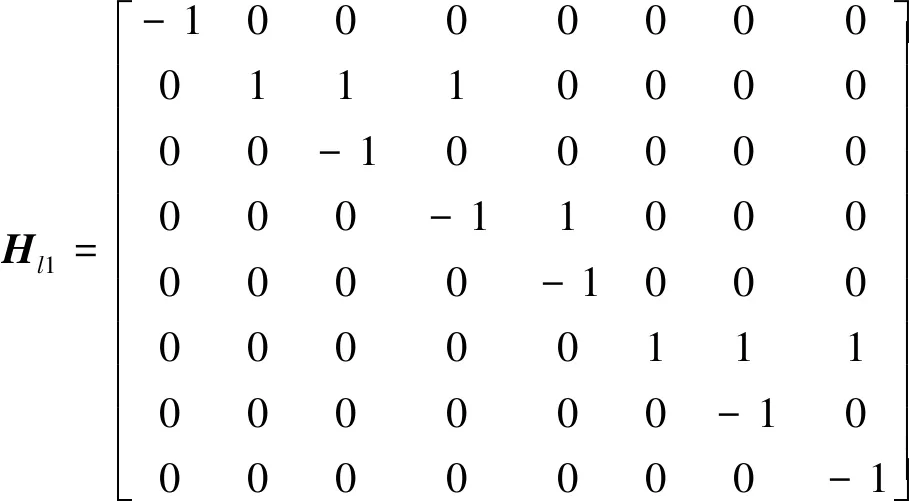
(7)
根据式(7)可知,H22=1,H23=1,H24=1,H33=-1,H44=-1,说明节点2~4之间存在故障,且H66=1,H67=1,H68=1,H77=-1,H88=-1,说明节点6~8之间存在故障,图2中节点2~4之间、节点6~8之间的电流波动异常,说明这两个区域确实存在故障,与本文技术判定的故障区域一致。试验证明:在并网型光伏微电网闭环运行过程中出现多重故障时,本文所提判定技术可精准判定故障区域。
2.2 线路2内部出现两相故障
线路2内部出现两相故障的三相电流变化情况如图4所示。
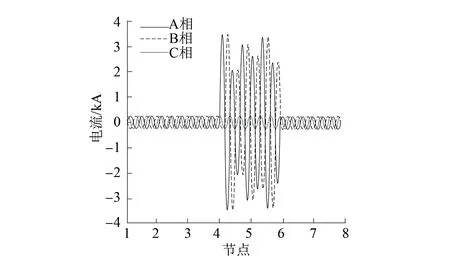
图4 两相故障的三相电流变化情况
利用本文技术构建线路2的故障区域判定矩阵Hl2,具体如下:
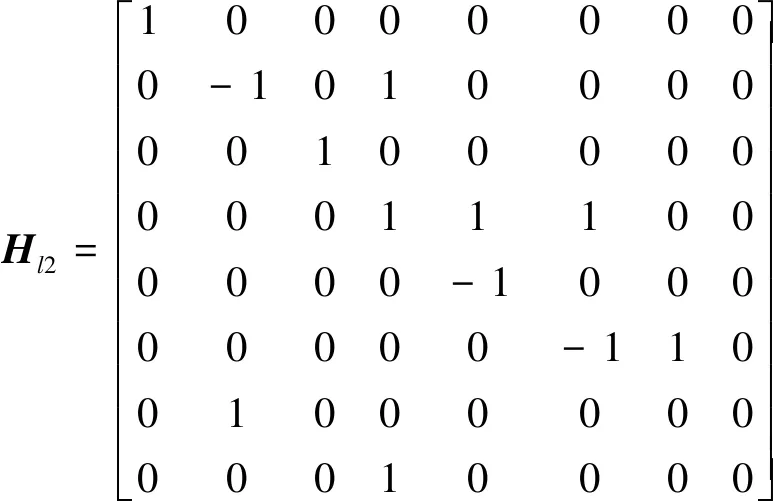
(8)
根据式(8)可知,H44=1,H45=1,H46=1,H55=-1,H66=-1,说明节点4~6之间存在故障,图3中节点4~6之间电流波动异常,说明该区域存在故障,与本文所提判定技术判定的故障区域一致。试验证明:在并网型光伏微电网出现两相故障时,本文所提判定技术也可以精准判定故障区域。
2.3 线路3的系统侧发生故障
线路3系统侧发生故障时的三相电流变化情况如图5所示。
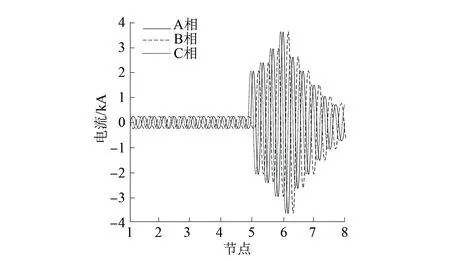
图5 系统侧发生故障时的三相电流变化情况
利用本文所提判定技术构建线路3的故障区域判定矩阵Hl3,具体如下:
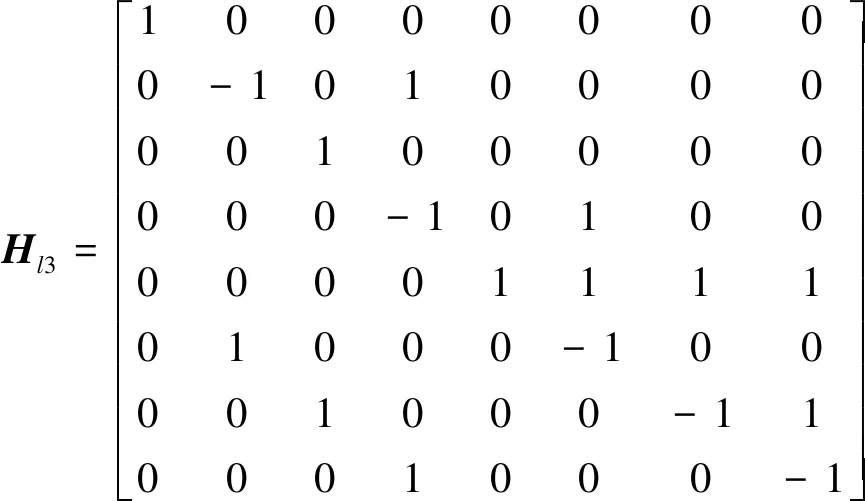
(9)
根据式(9)可知,H55=1,H56=1,H57=1,H58=1,H66=-1,H77=-1,H88=-1,说明节点5~8之间存在故障,图4中节点5~8之间电流波动异常,说明该区域存在故障,与本文所提判定技术判定的故障区域一致。试验证明:在并网型光伏微电网系统侧出现故障时,本文所提判定技术依旧可精准判定故障区域。
3 结 语
为提升微电网运行稳定性,需精准判定故障区域,及时进行维修工作,尽快解决故障问题,为此研究四维坐标系下并网型光伏微电网故障区域判定技术。利用球填充四维坐标点集的集合划分方法,划分微电网区域;通过图论算法构建微电网故障数学模型,依据故障前后功率变化量和区域故障电流方向,实现故障区域判定。试验结果证明该技术可有效划分微电网拓扑结构,在出现多重故障、两相故障与系统侧故障情况下,均可精准判定微电网的故障区域。
