无人系统核心架构综述及标准化刍议
2023-02-02孙梦男
摘 要:近些年来无人系统民用和军用领域发展突飞猛进,应用广泛。本文从无人系统自主性、无人系统互操作性和无人系统协同三个方面对无人系统核心架构进行了梳理和总结。首先对无人系统核心技术,即自主性和互操作性进行了概念内涵、关键技术、互操作性标准体系和能力评估等方面进行论述;其次,结合国内外相关的研究和应用介绍了无人系统协作的发展现状;最后从规范无人系统的发展和军民融合发展角度提出相关标准化建议和思考。
关键词:无人系统,自主性,互操作性,人机协同,跨域协同,标准化
DOI编码:10.3969/j.issn.1002-5944.2023.17.011
Overview of Core Architecture and Brief Discussion of Standardization of Unmanned System
SUN Meng-nan
(Armed Police Force Research Institute)
Abstract: In recent years, unmanned systems in civil and military fi elds are developing rapidly and widely applied. This paper sorts out and summarizes the core architecture of unmanned systems from three aspects: autonomy, interoperability and collaboration of unmanned systems. Firstly, the paper expounds core technologies of unmanned systems, namely autonomy and interoperability, in terms of concept connotation, key technologies, interoperability standards system, and capability evaluation. Secondly, the paper introduces the development status of unmanned system collaboration, based on relevant research and application at home and abroad. Finally, the paper puts forward relevant standardization suggestions from the perspective of regulating the development of unmanned systems and military-civilian integration.
Keywords: unmanned system, autonomy, interoperability, human-machine collaboration, cross-domain collaboration, standardization
0 引 言
無人系统(Unmanned System,UMS)是指在主要部件上无需操作者的干预,完成指定任务的动力物理系统[1]。我国学者中杨巍等[2]认为无人系统是指无人驾驶/操控的、通过遥感/预编程操作或自主运行的、可搭载任务载荷进行各类民用或军用工作任务的系统。按照活动的物理空间划分,无人系统主要包括空中无人系统,如无人机系统或飞行器(UAS或UAV);地面无人系统,如无人地面载具(UGV);海上无人系统,如无人水面车辆(USV)和无人水下车辆(UUV)等。
近年来,随着人工智能技术不断取得突破,无人系统在军用和民用领域的发展突飞猛进,应用广泛,如军用方面的海洋主权维护、抢险救灾,民用方面的无人机喷洒农药、无人机电网全自动巡检、无人消毒等等。无人系统由于具有更强的性能、更出色的高危作业能力以及更低的成本,受到广泛关注;自主性和机器人技术的进步成为无人系统发展的倍增器。
美国国防部发布的《无人系统综合路线图(2017—2042)》[3]中,重点强调了无人系统的互操作性、自主性、网络安全和人机协同四项关键主题。从国内外的实践来看,无人系统的自主性、无人系统的互操作性、无人系统的协同性是无人系统架构的重要核心。自主性将大大提高有人和无人系统的效能,互操作性是无人系统集成和操作的主要推动力,无人系统间的协同和人机协同是无人系统发展的最终目标,而互操作性、自主性是无人系统协同的关键支撑。
本文将从无人系统自主性、互操作性和无人系统协同三个方面论述无人系统架构研究与应用,并从标准化角度探讨无人系统开展标准化工作的主要思路。
1 自主性
1.1 自主性概念
目前比较公认的关于无人系统自主性的定义,是由美国国家标准与技术研究院无人系统自主性等级特别工作组(ALFUS)提出的[1],认为无人系统的自主性(Autonomy)是指无人系统拥有传感、感知、分析、交流、计划、决策和行动/执行的能力,并完成人类通过人机交互布置的指定的任务,是系统的自我管理能力。
国内学者也对无人系统自主性进行了广泛的研究。刘佩林等[4]将无人系统自主性定义为无人系统实体对象根据对外部环境的感知以及对环境与自身的理解,在外部任务驱动下,实现独立制定并选择不同行动方案的能力。王菖等[5]强调了“自主”和“自动”的区别,认为“自动”是数据驱动的,没有环境感知与自主决策的能力;而“自主”是信息甚至知识驱动的,具有感知、判断、决策、行动的能力。
1.2 自主性技术
人工智能和機器学习是无人系统自主性的关键支撑技术。人工智能和机器学习可以使无人系统实现自主学习和决策,从而提升系统的自主等级,拓展并改进系统功能。在美国国防部最新一版的《无人系统综合路线图》[3]中,提出将主要采用以下方式来加速人工智能和机器学习技术的发展:发展云计算、VR和AR技术,以提升无人系统的决策能力和人机交互能力;加强与亚马逊、苹果等高科技公司的合作;建设专用军事训练数据;开展广泛的学术交流活动;开发相关验证方法等。
根据无人系统自主性定义,可以将无人系统自主性的关键技术分为态势感知、自动规划、策略学习等几大方面。态势感知主要是针对无人系统所感知的多维信息进行处理,理解与预测目标的未来态势[6]。感知主要可分为导航感知、任务感知、系统健康感知和操作感知四类[7]。目前态势感知方法主要包括基于专家系统的态势感知方法、基于模板匹配的态势感知方法、基于贝叶斯推断的态势感知方法和基于深度学习的态势感知方法。
自动规划主要从规划论的视角,目的是提供全局目标和路线。目前的研究聚焦于如何通过在地图规划合理路线为智能体提供子目标。比较普遍的方法包括基于启发式搜索的方法和基于深度强化学习的方法。策略学习主要基于机器学习、深度强化学习算法,通过与场景进行交互构建出环境状态到行为决策的映射。
1.3 自主性评估方法
构建无人系统自主性评估体系和方法具有重要意义,可以为无人系统规划提供方向性指导,帮助系统研发人员进行系统性能衡量,评估系统能力等。目前比较经典的自主性评估方法主要有ALFUS框架,其他学者也提出了不同的自主性评价方法,如蛛网评价模型[8]、模糊评价方法[9]、公式法[10]等。
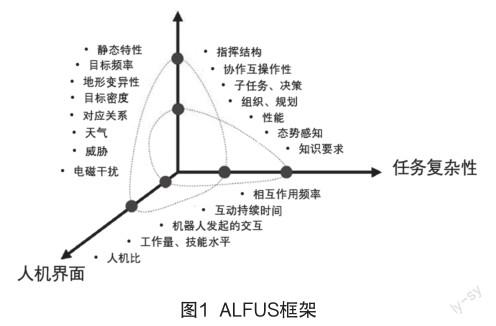
ALFUS框架由美国国家标准与技术研究院无人系统自主性等级特别工作组提出[1],从任务复杂性(MC)、环境复杂性(EC)和人的独立性/自主水平(HI)三个方面/轴来衡量无人系统的自主程度,每一个维度各有一套指标体系,如图1所示。通过三维坐标的方法对无人系统的自主等级进行综合评价。对一个无人系统进行自主性评估时,首先对任务进行逐级分解,根据详细模型中对三个维度等级的具体描述为其分配权值,将其自主性等级线性化为0-10的一个范围,最终得出评估结果。
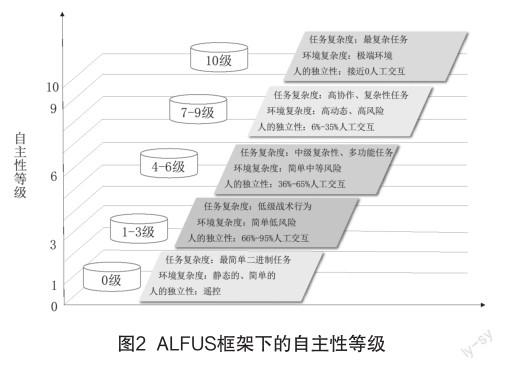
根据ALFUS框架,将无人系统自主性级别分为0-10级,如图2所示。总体来看,可以将无人系统的自主性分为低、中、高三个水平。低自主水平指在简单环境中控制简单任务;中自主水平指计划并执行操作员指定的任务,对环境和作战变化及信息的理解和反应有限;高自主水平指可以完成所有高复杂性的任务,能够完全独立于操作员的干预。
2 互操作性
2.1 无人系统互操作性概念
互操作性的概念源于信息系统领域,其本质是实现异构系统之间的信息交换能力[11]。电气与电子工程师协会(IEEE)将互操作性定义为两个或多个系统或组成部分之间交换信息以及使用已交换信息的能力[12]。美国国防部认为互操作是系统、单元或军队其他系统之间提供/接收服务,并协同高效合作的能力[13]。我国国家军用标准《军事信息系统互操作性等级与评估》(GJB/Z 144A—2015)认为,互操作性是“两个或两个以上系统或应用之间交换信息并相互利用所交换信息的能力”[14]。这些概念都强调了系统之间的信息交换。
互操作性是无人系统的技术基础,能够加速无人系统间的信息传输以及信息收集者、决策者、规划者和作战人员之间的信息传输,可以提高信息共享能力,促进作战系统间的相互协作,从而带来更高的财政效率和作战效果。互操作性是实现有人-无人系统协同和跨域无人系统协同的基础。
2.2 互操作标准体系
一些国际组织和国家对无人系统互操作性制定了相关标准体系。其中,北约发布的《用于北约无人机互操作性的无人机控制系统标准接口》(NATO STANAG)系列标准[15]是代表性的无人系统互操作性标准。该系列标准事实上已经成为国际上度量无人机互操作性的主要标准。STANAG标准从数据格式、接口要求和通信协议四个方面定义了互操作性标准。
美国参与并使用NATO STANAG系列标准,强调互操作性的五项关键支撑因素,包括通用/开放架构、模块化/互换性、能力验证、数据传输和数据规范。
国际标准化组织/国际电工委员会第一联合技术委员会物联网及应用分技术委员会ISO/IEC JTC1/SC 41制定了《物联网系统互操作性》(ISO/IEC 21823),主要包括框架、传输、语义、句法、行为和策略互操作。
我国学者王文峰等[16]在国外标准体系的基础上,提出了一个互操作标准架构,包括框架、机载数据格式、通信链路协议、控制系统接口、信息交换模型、协同信息处理、边缘计算和测试验证。
2.3 互操作关键技术
根据美国国防部发布的《无人系统综合路线图》[17],无人系统互操作所涉及到的关键技术主要包括通用/开放架构;模块化/部件互换性;能力验证;数据传输和数据安全。吴立珍等[18]根据互操作能力生成方式梳理了关键技术之间的逻辑关系。自底向上的方式是基于数据、接口、传输协议的标准化及软硬件的模块化,支撑形成信息传输的能力;自顶向下的方式是基于互操作的系统架构和模型等,支撑形成任务协同等能力。无人系统的能力验证是系统间相互信任的基础。
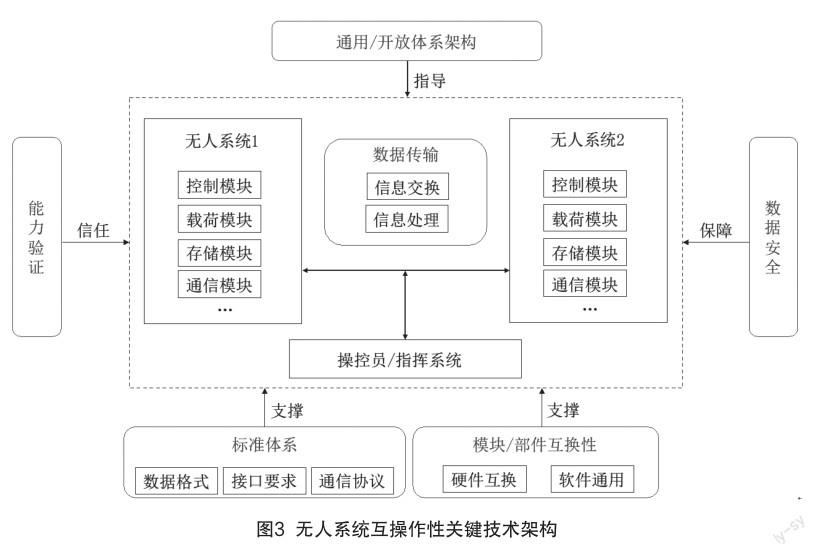
本文构建了无人系统互操作性关键技术支撑架构,如图3所示。通用/开放体系架构对于指导无人系统之间的协同起到引导作用,目的是使无人系统在任务空间或操作领域内可以使用共同的标准或服务。互操作体系框架应包含多个视角,如国防部体系结构框架(DoDAF)的操作、系统、服务、数据与信息视角。开放式的体系设计将允许同时控制和集成多个平台,包括跨领域操作。
互操作标准体系和软硬件的模块化/部件互換性是无人系统之间信息交互的基础。实现互操作的基础是子系统之间需要使用通用语言进行消息传输,这需要标准协议和模块化接口的支持。根据STANAG标准,对无人系统互操作的数据格式、接口要求和通信协议进行规范。模块化/部件的互换性可以有效降低系统互操作的困难,实现软硬件的柔性升级,提高共享能力和系统防护。
进行系统之间互操作的前提是对系统自主性能力进行评估。通过对系统的测试、评估、验证和确认(TEVV)确定无人系统的自主能力和互操作能力。近年来,美国、英国、法国等北约国家纷纷加大对无人系统的互操作能力验证力度[18]。2011年美国陆军进行了有人与无人系统集成能力(Manned Unmanned System Integrated Capability,MUSIC)项目的综合演练,展示了有人直升机和无人机系统编队间的互操作性和系统集成能力[17]。
系统互操作会带来数据量的指数级增加,这产生了数据挑战。需要改进数据策略,整合大量的数据信息,提高数据交换、处理、和分析的速度,为工作人员提供及时的决策质量信息。此外,数据安全性是无人系统的基本保障,系统互操作过程涉及到各系统间数据权限的问题,既要能支持系统在整个生命周期中的信息交互,提高系统互操作的灵活性,又需确保系统数据和信息的安全性,保证最大化的任务支撑。
3 无人系统协同
3.1 人机协同
随着信息化和智能化的飞速发展,无人系统协同成为无人机应用形式的新变革。从目前的应用现状来看,无人系统协同在军用领域的应用经验更多、技术也更先进一些。由于目前无人系统的自主化和智能化水平有限,不能完全代替人的思维和决策,有人-无人系统协同将成为新型战场中主要作战模式[19]。有人-无人系统协同是指人类操作员与无人系统通过信息、资源等方面的共享和优化,对任务进行理解和分析,进而完成协调一致的作战行动。人机协同作战的本质是将人与无人系统有机融合,形成优势互补、能力相济的新型高效作战体系[20]。
例如,在空中作战领域,美国国防高级研究计划局(DARPA)在2015年提出体系集成技术及试验(System of Systems Intergration Technology and Experimentation,SoSITE)项目[21],通过分布式航空作战的架构和技术集成工具,将航空作战能力分布于有人和无人平台上,以提高整体作战效能。其中,有人战机充当指挥平台,无人机等进行情报搜集、监视侦查、干扰等;机载计算机结合信息资源制定作战方案,供飞行员决策;低成本武器可进行“蜂群”式攻击。这种人机协同作战体系可以大大提升航空作战能力和效率。
目前人机协同涉及到的关键技术主要包括分布式协同控制体系架构技术、任务理解一致性技术、智能决策技术等。分布式协同控制体系结构是人机协同作战系统的“骨架”,相同领域甚至不同领域的人机系统必须能够跨领域、无缝操作,才能最大程度发挥整体的潜能。任务理解一致性是人机协同作战的前提,只有充分理解用户指令,才能使无人系统的能效充分发挥。人机融合的协同决策技术是人机协同最高等级的能力的体现,需要将作战人员对复杂、不确定环境的判断与无人系统强大搜索计算能力有机结合,进而快速形成最优方案。
3.2 无人系统跨域协同
无人系统间的协同主要包括同域无人系统协同作战及跨域无人系统协同作战[22]。随着军事技术的飞速发展和复杂环境的快速变化,无人系统同域协同已无法满足当今作战需求,无人系统跨域协同的重要性逐渐凸显,也逐渐为各个国家广为运用。无人系统跨域协同是指陆、海、空等可在不同空间内运行的、多个无人系统组成有机整体,其相互间可通过信息传输、行为交互、任务协同等实现能力互补和效能提升[23]。
目前美国等国家先后进行了无人系统跨域协同战略规划、技术创新、项目试验等[21]。如在海上军事领域,DARPA于2015年发布了跨域海上监视与目标捕获(CDMaST)项目[24],旨在构建面向海洋的跨域协同体系。
4 总结与标准化启示
随着人工智能等相关技术的快速发展,无人系统自主性、互操作性与系统协同性将会得到长足发展,在民用和军用领域的重要性逐渐凸显。现阶段,我国无人系统应用领域不断扩大,军用领域方面进一步提高军事行动的效率和安全性,民用领域如森林火灾监测、农业农田管理等产业应用更加活跃和多元化。这些发展对无人系统标准化工作提出迫切需求,以更好规范无人系统在不同应用场景下的有序发展。
近些年来,我国在无人系统方面开展了通用要求、试验规程、信息传输等相关标准的制定和研究,如GJB 2347-1995《无人机通用规范》、GJB 9167-2017军用无人值守雷达通用规范、HB/ Z20013-2012无人驾驶飞机气动布局设计指南等;主导制定并发布无人机领域国际标准4项,在编国际标准9项,如两项民用无人机领域国际标准ISO 4358:2023《民用多旋翼无人机系统试验方法》和ISO 24352:2023《轻小型无人机用电动能源系统技术要求》等,但是缺少从无人系统架构角度的整体布局和统筹考虑,笔者建议聚焦以下三方面,进一步加强标准化工作对无人系统发展的技术支撑。
4.1 注重无人系统的顶层规划,推进无人系统协作的体系化和标准化
无人系统的协同作战逐渐成为各国在军事领域关注的重点。美、法、德、欧盟等国家和国家联盟纷纷开展多项无人系统跨域协同和人机协同项目[23],构建无人系统协同的顶层架构。依托无人系统的自主能力和互操性能力,美国等国家相继推出人机协同作战项目和跨域协同作战项目,进行战略规划和测试验证,不断完善新型作战蓝图,提高作战能力。无人系统协同涉及多领域、跨学科,需要借鉴系统学等理论框架,构建体系化和标准化的模型架构,为无人系统的建设和发展提供指导方向。
4.2 建立无人系统能力评价模型,制定无人系统能力验证系列标准
目前我国在国家军用标准中对军事信息系统互操作性等级进行了规范[25],但缺乏军用无人系统的自主能力评价标准模型。无人系统包含信息层面和行为层面,目前信息系统等级模型无法涵盖对高等级无人系统在平台控制、载荷操作等行为层面的评价。建立考虑人-机-任务-环境空间耦合的复杂性,定性和定量相结合的自主能力评价标准模型,并聚焦无人系统能力验证系列标准的制定,不但有力提升无人系统互操作性,而且通过系统能力验证来确认互操作对象的安全性。
4.3 构建动态开放的无人系统军民通用标准体系,实现制度型开放
无人系统在整体上虽还处于初级发展阶段[26],但在军用和民用领域的广泛应用已展现出巨大的发展潜力和社会价值,是实现智能化社会和现代化国防的关键支撑,也是落实军民通用体系的重要应用领域。目前,我国无人系统军民通用标准体系的建设颇为不足,需要构建动态开放的军民通用标准体系,研制无人系统军民共性技术标准,有效减少社会资源的浪费,降低先进技术的交流门槛,促进军民深度融合。同时,在构建无人系统军民通用标准体系时,要积极开展“走出去”行动,紧跟国际步伐,加大参与国际标准制定或转化国际标准为国内标准,掌握科技和产业应用的主動权和话语权。
参考文献
[1]Huang H M, Pavek K, Albus J, et al. Autonomy levels for unmanned systems (ALFUS) framework: An update[C]// Unmanned Ground Vehicle Technology VII. SPIE, 2005, 5804: 439-448.
[2]杨巍,秦浩,王佳,等.2021年世界军用无人系统领域发展综述[J].中国电子科学研究院学报,2022,17(4):368-373. Office of the Secretary of Defense. Unmanned Aerial
[3]Vehicles Roadmap 2017–2042. Technical Report[R]. Department of Defense, Washington DC, 2018.
[4]刘佩林,陈祥,牛小明.无人系统自主性技术研究现状与发展趋势[J].兵工自动化,2022,41(12):61-65.
[5]王菖,柏航,牛轶峰.自主无人系统的军事应用风险与挑战[J].国防科技,2023,44(1):34-40.
[6]符杰凯. 基于无人系统集群的多维数据态势感知技术研究[D].成都:电子科技大学,2021.
[7]腾讯研究院. 人工智能[M]. 北京: 中国人民大学出版社, 2017.
[8]王越超,刘金国.无人系统的自主性评价方法[J].科学通报,2012,57(15):1290-1299.
[9]Li J, Tang Z, Tan Y, et al. Research on Autonomous Capability Evaluation of Unmanned Ground Vehicles[J]. Science Discovery, 2016,4(1).
[10]Curtin T, Crimmins D, Curcio J, et al. Autonomous underwater vehicles: Trends and transformations[J]. Mar Technol Soc J, 2005, 39(3).
[11]SMITH J, MEYERS B. Interoperability patterns andSystems of Systems acquisition[C]//The 45th AIAAAerospace Sciences Meeting and Exhibit, Nevada,USA, January 08-11, 2007.
[12]U.S. DoD. DoD dictionary of military and associatedterms[EB/OL]. [2021-04-27]. https://www.dtic.mil/doctrine/jel/ new_pubs/jp1_02.pdf.
[13]DALLO S Y, HERENCIA H, PADILLA J, et al.Understanding interoperability[C]. 2011 Spring Simulation Multi-conference, Boston, MA, USA, April03-07, 2011.
[14]中国人民解放军总装备部. 军事信息系统互操作性等级与评估: GJB/Z 144A—2015[S]. 北京: 总装备部军标出版发行部, 2015.
[15]North Atlantic Treaty Organization. Standard Interfaces of UAVControl System ( UCS ) for NATO UAV Interoperability: STANAG4586[S]. NATO, 2015.
[16]王文峰,余雪梅,徐冬梅.无人系统互操作性标准化综述[J].中国标准化,2020(12):100-104.
[17]U.S. DoD. Unmanned systems integrated roadmap FY2013-2038 [R]. Washington, DoD, 2013: 139-141.
[18]吴立珍,牛轶峰.无人系统互操作性发展现状与关键问题[J].国防科技,2021,42(3):49-56.
[19]张佳,刘清平,辛斌.有人/无人系统协同作战的任务理解研究[J].火力与指挥控制,2022,47(10):52-58.
[20]傅好华,单月晖. 智能化人机协同作战发展研究[C]//中国指挥与控制学会.第九届中国指挥控制大会论文集.兵器工业出版社,2021:219-223.
[21]李东兵,申超,蒋琪.SoSITE等项目推动美军分布式空战体系建设和发展[J].飞航导弹,2016,381(9):65-70.
[22]初军田,张武,丁超,等.跨域无人系统协同作战需求分析[J].指挥信息系统与技术,2022,13(6):1-8.
[23]何玉庆,秦天一,王楠.跨域协同:无人系统技术发展和应用新趋势[J].无人系统技术,2021,4(4):1-13.
[24]戴钰超.聚焦马赛克战:DARPA 新财年海上系统重点项目概览[J/OL].(2021-06-30)[2022-10-18]. https:// ibook.antpedia.com/x/637254.html.
[25]中国人民解放军总装备部.军事信息系统互操作性等级与评估: GJB/Z 144A—2015[S].北京:总装备部军标出版发行部, 2015.
[26]郭行.智能无人系统发展战略研究[J].无人系统技术,2020,3(6):1-11.
作者简介
孙梦男,博士,助理研究员,主要研究方向为标准规范,新质装备和新型系统运用。
(责任编辑:张佩玉)
