水稻直播机气流式施肥监测系统设计与试验
2023-01-16魏斯龙廖明铭陈海波
曾 山,魏斯龙,廖明铭,曾 力,陈海波
水稻直播机气流式施肥监测系统设计与试验
曾 山1,魏斯龙1,廖明铭1,曾 力1,陈海波2※
(1. 华南农业大学工程学院,广州 510642;2. 华南农业大学基础实验与实践训练中心,广州 510642)
针对水稻直播机施肥装置施肥过程中易堵塞及无法及时报警的问题,结合南方水稻直播施肥的农艺要求,该研究设计了一种水稻直播机气流式施肥监测系统,可以在施肥装置出现管道堵塞后进行报警提示。首先,对气流式施肥监测系统的整体结构进行设计。然后,对关键部件气流分流管道建立仿真模型,采用Fluent和Rocky软件进行气固耦合仿真试验,以肥料颗粒的动能变化量为指标,对气流分流管道的防堵性能进行试验,仿真试验结果表明,当气流分流管道进气口施加800 Pa气流时,肥料颗粒的动能提高了39.7%。最后,采用Box-Behnken响应面试验设计方法进行台架静态试验,以堵塞报警准确率为评价指标,得出较优工作参数为气流分流管道内径28 mm,进气口气压值700 Pa,施肥速率20 g/s;以较优参数进行田间试验,结果表明,堵塞报警准确率均大于90.0%,最高达96.7%;装置工作稳定性好,未出现装置失灵情况,可满足水稻施肥装置堵塞监测准确率要求。该研究可为水稻施肥堵塞报警监测提供参考。
设计;试验;水稻直播机;施肥监测;Fluent-Rocky耦合
0 引 言
中国是世界上最大的水稻生产和消费国之一[1],化肥对水稻的增产率达40%~60%[2-3],但传统的撒肥方式均匀性差,且肥料利用率低,导致生态环境的污染,不利于农业的可持续发展[4-6]。水稻侧深施肥技术可以准确控制施肥量,提高肥料利用率,实现化肥减量增效,促进农业绿色发展,目前已成为水稻的主要施肥方式[7-9]。侧深施肥方式是在水稻直播或者插秧阶段使用施肥机械一次性将肥料施放在水稻侧方位置,该施肥方式可以保证水稻生长期的养分需求,其肥料利用率相对传统施肥方式提高20%~30%[10]。但是田间侧深施肥作业时,由于田间环境复杂,或者肥料在吸水受潮后易发生堵塞现象,造成漏施,使作物缺肥[11-12]。因此亟需研究水稻施肥防堵塞新技术及新设备以解决施肥易堵塞及堵塞后无法及时发现的问题。
近年,国外学者对施肥防堵问题开展了相关研究,国内在这方面的研究尚处于初级阶段,对施肥状态监测装置的研究也相对较少,熊文江[13]设计了螺旋式强制侧深施肥装置,采用螺旋绞龙结构,可防止施肥管道出现堵塞现象,但肥料破损严重;王金峰等[14-15]设计了叶片调节式和圆盘顶出式水田侧深施肥装置,解决了施肥均匀性低和输肥管路及排肥器易堵塞等问题;曾山等[16]研制了水稻直播机气流式分层施肥装置,采用文丘里管道并利用风机实现气流式输肥,减少了施肥系统出现管道堵塞的概率;周利明[17]等设计了一种基于电容法的施肥量检测系统,能准确测量施肥量,并能够识别管路堵塞故障;陈幸等[18]研制了玉米免耕变量施肥播种机作业质量监控系统;赵立新等[19]研制了一种基于变距光电传感器的小麦精播施肥一体机监测系统,可以判断施肥装置正常、堵塞、缺失和漏施等运行状态,实现播种施肥一体机作业过程的实时监测。以上施肥监测装置工作时均利用传感器与肥料颗粒直接接触,虽然监测准确率高(均达90%以上),但传感器易受肥料粉尘或者潮湿影响,存在监测准确率下降或者监测失灵的缺点[20],无法长时间稳定工作。国外,日本洋马、久保田和井关三大农机公司研制的水稻插秧机同步侧深施肥装置,均采用气流强制输肥,实现施肥系统防堵[21-23];欧美国家主要以旱地作物为主,多采用气流式集排输肥装置[24],美国John Deere公司研制了一种气力式变量施肥播种机,配备有播种施肥监测传感器,能够对播种施肥的管路故障进行识别。
为此,本文提出一种利用气流的间接监测方式,施肥监测时可避免肥料颗粒粉尘和潮湿影响,保证工作稳定性,并通过样机试验对其监测准确率展开试验研究,确定最优工作参数,以期为水稻施肥防堵及监测技术研究提供理论依据和参考。
1 气流式施肥监测系统结构及工作原理
1.1 系统结构
气流式施肥监测系统与2BHD-10型水稻旱直播机配套使用,其整体结构如图1a所示。整机结构包括肥料箱、排肥器、排肥管道、气流变化反馈装置、开沟器、机架、三点悬挂机构、气泵箱和控制箱等。其中气流式施肥监测系统结构图如图1b所示。

1.肥料箱 2.排肥器 3.气泵 4.进气管道 5.开沟器 6.气流分流管道 7.出气管道 8.浮子 9.空心硬管 10.安装支架 11.激光测距传感器 12.排肥管道 13.气流变化反馈装置 14.机架 15.三点悬挂机构 16.控制箱
1.2 工作原理
根据图1b所示结构,排肥器工作时,肥料从排肥器排出后在重力作用下进入排肥管道,气流通过进气管道进入气流分流管道,在肥料经过气流分流管道时,气流与肥料混合,肥料在气流和重力的双重作用下进入施肥沟内,由覆土盘进行覆土;同时气流分流管道设置有出气口,出气口通过出气管道连接气流变化反馈装置,该装置由图中出气管道、空心硬管、浮子、激光测距传感器和安装支架等组成;当气流分流管道或者下端的排肥管道出现堵塞时,通过出气管道的气流速度会增大,导致空心硬管内的浮子向上运动,激光测距传感器监测到浮子位置变化后,装置将进行报警,从而实现施肥管道的堵塞监测报警功能。
1.3 主要技术参数
水稻直播机气流式施肥监测系统主要技术参数如表1所示。采取条带状施肥方式。
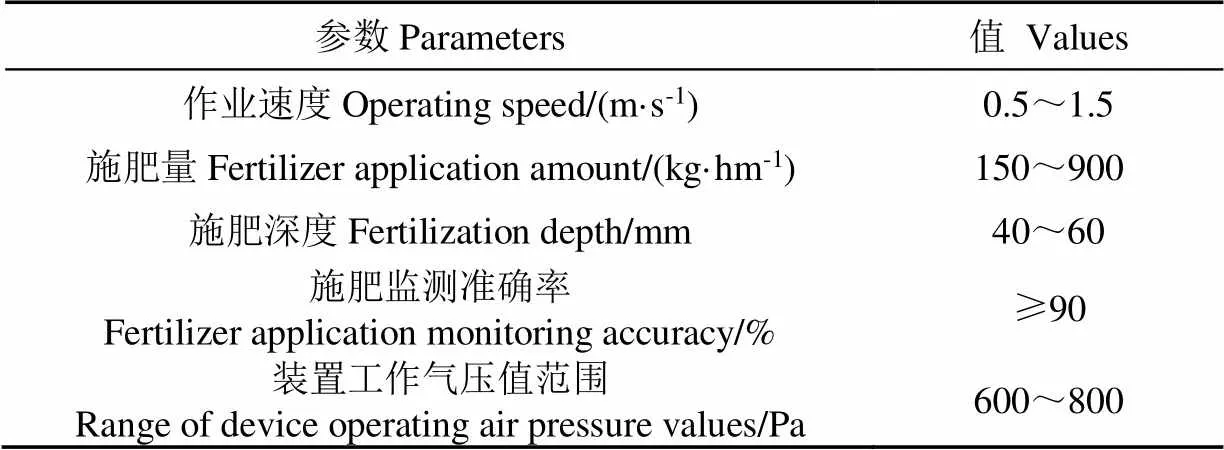
表1 气流式施肥监测系统技术参数
2 气流式施肥监测系统设计
2.1 气流分流管道设计
2.1.1 气流分流管道结构及其工作原理
气流分流管道结构如图2所示,图2a为结构示意图,图2b为剖视图;主要包括管道外壳、进气口、排肥口和出气口等,气流通过PV软管进入气流分流管道的进气口内,其中一部分气流通过射流的形式进入施肥管道的内部;另一部分气流通过环形通道进入出气口处,出气口与气流变化反馈装置相连接。工作过程中,肥料颗粒由排肥器排出后,从气流分流管道的上端进入,与气流混合形成气肥混合流,使肥料颗粒在气流和重力的双重作用下从排肥口排出,可以有效防止肥料在排肥过程中出现堵塞。
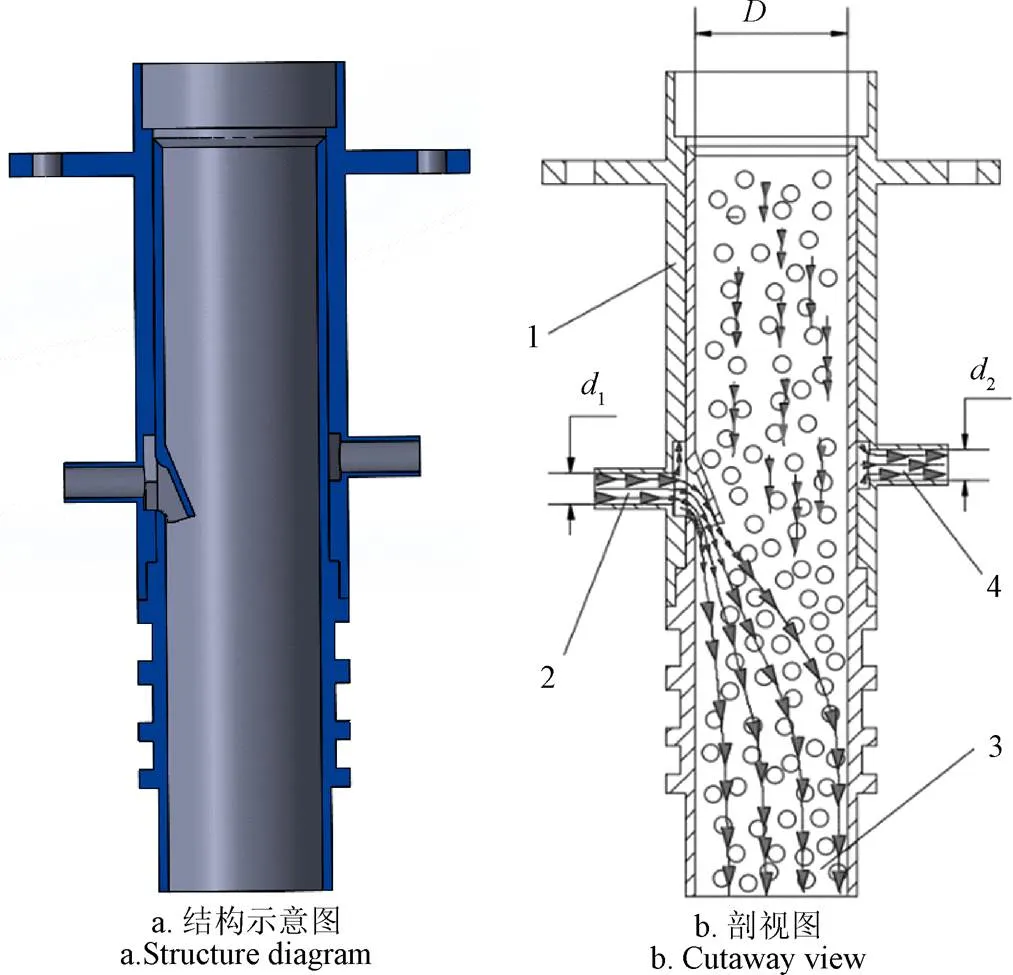
1.管道外壳2.进气口3.排肥口4.出气口
1. Pipe shell 2. Air inlet 3. Fertilizer discharge 4. Air outlet
注:为气流分流管道内径,mm;1为气流分流管道进气口内径,mm;2为气流分流管道出气口内径,mm。
Note:is the inner diameter of the air distribution duct, mm;1is the inner diameter of the air inlet of the air distribution duct, mm;2is the inner diameter of the air outlet of the air distribution duct, mm.
图2 气流分流管道结构示意图及剖视图
Fig.2 Structure schematic and cutaway view of the air flow diversion pipe
2.1.2 气流分流管道结构参数分析
气流分流管道是气流式施肥监测装置的核心部件之一,主要有两个作用,第一是利用气流与肥料颗粒混合,进行气流输肥,有效防止堵塞;第二是通过气流分流管道的出气口连接气流变化反馈装置,在施肥管道出现堵塞后通过气流变化反馈装置进行监测报警。因此气流分流管道内部的气流分布对作业性能有重要影响,由图2可知,影响其气流状态的结构参数有气流分流管道内径,进气口内径1,出气口内径2和进气口气压值1。
施肥装置的施肥速率s满足[17]
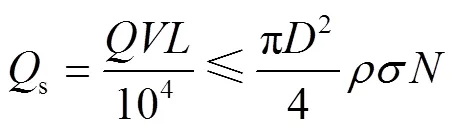
由式(1)可知,气流分流管道内径应满足
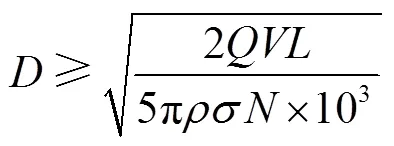
根据农艺要求,水稻的施肥量为150~900 kg/hm2,选取最大施肥量900 kg/hm2,机具作业速度取1.5 m/s,施肥装置的作业幅宽根据设计尺寸确定为=2.6 m,颗粒肥料选用的是挪威雅苒颗粒状复合肥,经测量其堆积密度为845 kg/m3,肥料填充系数取0.3,设计的施肥行数为5。将上述参数代入式(2)可得≥18.8 mm,考虑到18.8 mm为理论上满足施肥要求的直径,实际为了提高施肥管道的工作通畅性,在尺寸上应保留一定的余量,选取20%,因此内径≥22.6 mm。分流管道内径暂选24、28和32 mm三个值,后续通过试验确定性能较优的参数。
气流分流管道的进气口和出气口均通过PV软管进行连接,其中PV软管为标准件,常见的内径规格有6、8和10 mm,本研究选用内径为8 mm的软管,因此气流分流管道的进气口内径1和出气口内径2确定为8 mm。
2.2 气流变化反馈装置设计
2.2.1 气流变化反馈装置结构及其工作原理
气流变化反馈装置结构图如图3所示,主要包括安装支架、浮子、空心硬管和激光测距传感器等。气流变化反馈装置的支架安装在施肥播种机的机架上。空心硬管竖直安装,浮子位于其内部,而激光测距传感器位于其上端,且空心硬管上端与大气压连通。空心硬管的下端通过PV软管与气流分流管道的出气口相连通,气流变化反馈装置在工作过程中,激光测距传感器可实时测出浮子的位置,若气流分流管道出气口的气流速度变大,则空心硬管内浮子的位置将发生变化,此时激光测距传感器就会监测到浮子的位置改变而后报警提示。
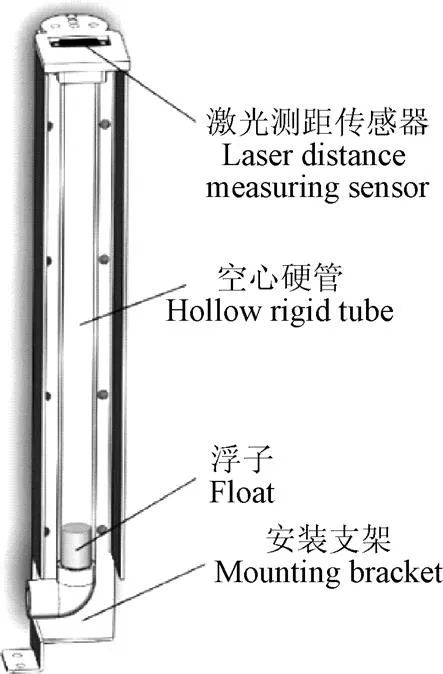
图3 气流变化反馈装置结构示意图
2.2.2 气流变化反馈装置参数分析
气流变化反馈装置是气流式施肥监测装置的核心部件之一,其中浮子的运动情况是该装置的一个关键因素,浮子的受力情况如图4所示。
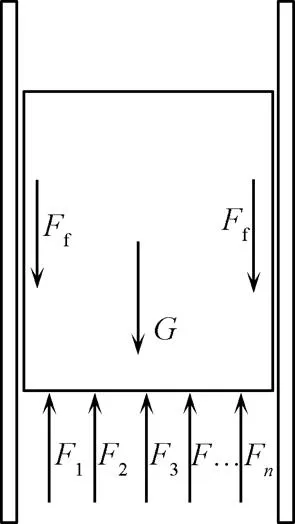
注:G为浮子的重力,N;Ff为浮子与空心硬管之间的摩擦力,N;F1, F2, …, Fn为气流对浮子的作用力,N。
由图4可知,浮子在保持平衡时,其所受力满足[25]:
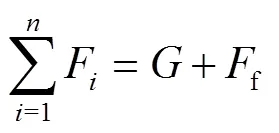
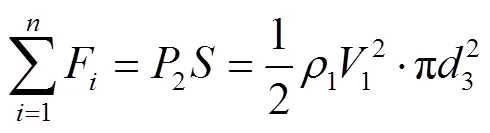
浮子静止时,由于浮子与空心硬管之间没有相对运动,所以摩擦力f为0;在浮子运动时,由于空心硬管内表面光滑,且与浮子之间存在微小间隙,因此摩擦力f接近于可零忽略不计。由式(3)~(4)可知,浮子的运动情况取决于平均速度1的大小,要使浮子在空心硬管内保持静止,并位于空心硬管最下端,平均速度1应满足
为保证浮子在空心硬管内上升运动,1应满足
根据装置尺寸,浮子的水平截面半径3为0.006 m,浮子质量约为0.7 g,即=0.007 N,气体的密度选取1=1.29 kg/m3,将参数代入式(5)~(6)可得:平均速度1≤9.8 m/s时,浮子在空心硬管内保持静止;平均速度1>9.8 m/s时,浮子在空心硬管内出现上升运动。
2.3 系统参数标定试验
在该装置中,气泵提供的气流气压值,以及在气流分流管道内部和出气口的气流速度大小对装置的性能都有重要影响,因此通过标定试验,测量并分析各因素的变化关系。试验器材包括台冠机电公司的ML-601气泵(气压范围:0~800 kPa,功率:600 W);压力调节阀,鑫思特公司生产的HT-1891数字压力表(精度:0.01 kPa,量程:−34~34 kPa,);泰克曼公司的TM-856 风速测量仪(精度:0.01 m/s,量程:0.3~45 m/s);PV软管等。
测量时将气泵的输出端连接至气流分流管道的进气口端,压力调节阀用于调节气泵的输出气流压力值,数字压力表测量气流分流管道的进气口的气流压力值,通过调节压力调节阀控制进气口的气流压力值1,选取压力值范围为200~1 300 Pa,梯度为100 Pa;分别测出气流分流管道内部和出气口的平均气流速度大小,其测量结果如图5所示。施肥管道未出现堵塞时,气流变化反馈装置应不报警提示,此时气流变化反馈装置中浮子位于空心硬管最下端,前面计算得气流平均速度1≤9.8 m/s,考虑气流平均速度不完全稳定,会出现10%大小的波动,故结合图5中出气口处气流平均速度的变化曲线,可得气流压力值应小于1 000 Pa,后续通过试验分析,确定较优参数。
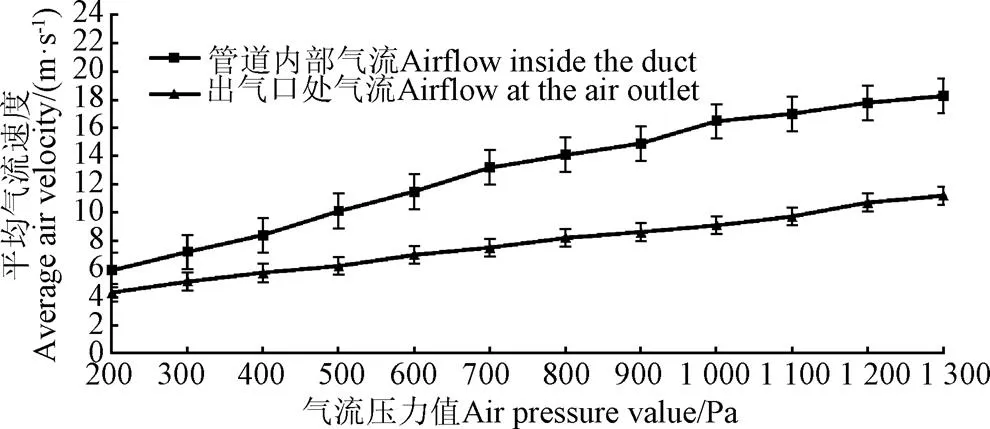
图5 气流分流管道内部和出气口处的平均气流速度随气流压力值的变化
3 参数优化
3.1 仿真分析
3.1.1 仿真方法和参数设置
为探明气流对肥料颗粒的影响,采用计算流体力学和离散元法研究肥料颗粒的运动状态,选用ANSYS Fluent 2020R1和Rocky 4.4仿真软件进行计算,并对该排肥过程进行模拟。首先,对肥料颗粒的物理参数进行测量,颗粒肥料选用的是挪威雅苒颗粒状复合肥,经测量,其粒径分布在1.5~4 mm内的比例大于90%,球型率大于0.9,堆积密度为845 kg/m3,密度为1 635 kg/m3。仿真的相关参数设置如表2所示[26-27]。
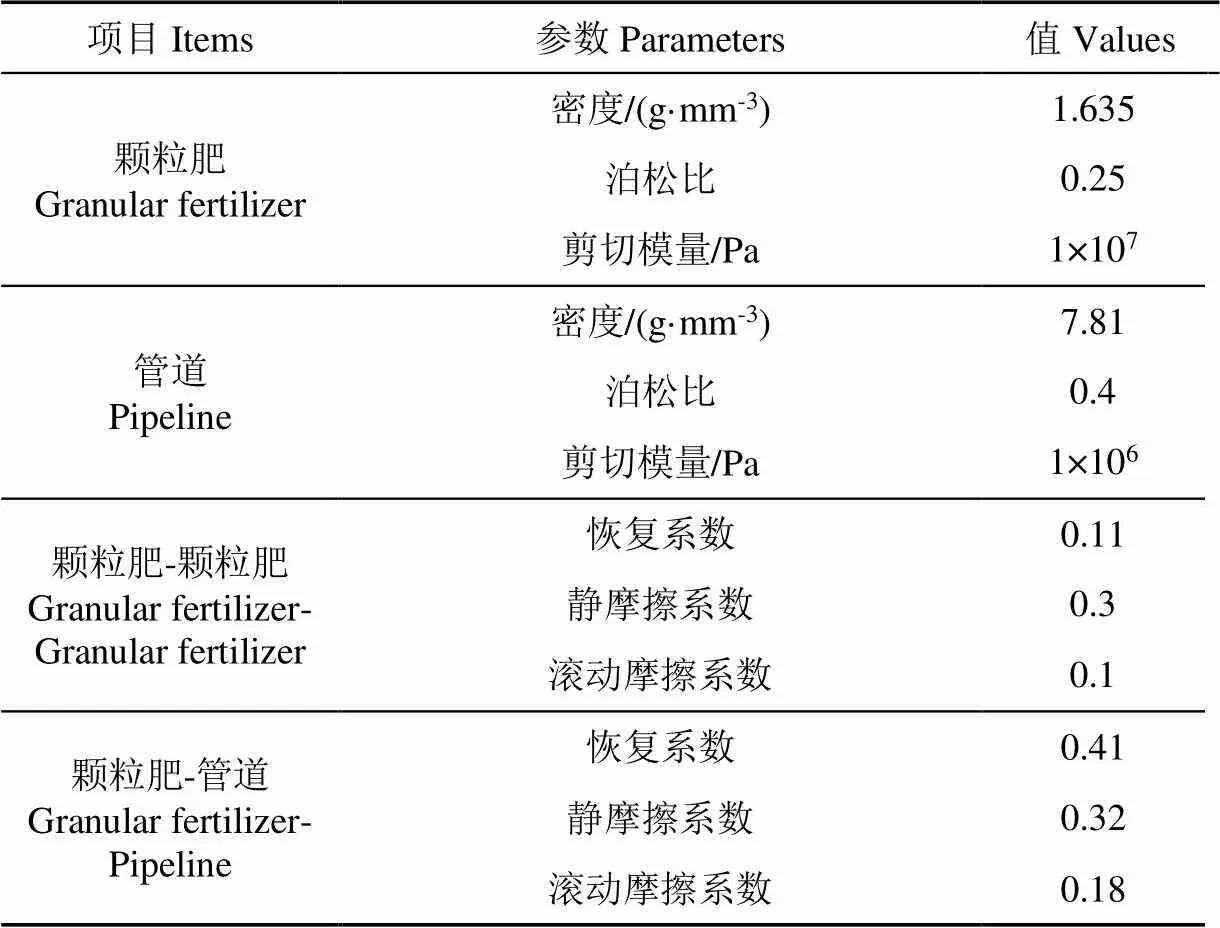
表2 仿真模型参数设置表
第一组仿真试验不考虑气流的影响,查看肥料颗粒不受气流影响正常排肥时的动能变化情况。采用Rocky软件单独计算。选用内径为28 mm的气流分流管道,先将STL模型导入Rocky软件中,在气流分流管道上端入口处设立颗粒入口,颗粒相关参数按照表2进行设置,设置肥料颗粒生成速度为25 g/s,生成时间为0.5 s,颗粒初始速度为1.5 m/s,颗粒运动遵循牛顿第二定律,总仿真时间设为0.5 s,每0.005 s保存一次数据。
第二组仿真试验考虑气流的影响,查看肥料颗粒在存在气流作用下排肥时的动能变化情况。采用Fluent软件和Rocky软件耦合计算,同样选用内径为28 mm的气流分流管道,先将IGS模型导入ANSYS软件中,导出计算流体域,对流体域划分网格,之后导入Fluent软件中进行流体计算,设置稳态计算方式,流体采用空气,边界条件设置进气口为压力入口,其压力值为800 Pa,计算直到结果收敛停止;最后将结果保存为CAS文件导入Rocky中进行离散元仿真计算,其中肥料颗粒相关设置与第一组仿真试验一样,总仿真时间设为0.5 s,每0.005 s保存一次数据。
3.1.2 肥料颗粒动能变化结果分析

式中V为所有颗粒的平均速度,m/s;m为第个颗粒的质量,kg;V为第个颗粒的速度,m/s;为肥料颗粒的总数量。
所有颗粒的平均速度V随时间的变化曲线如图6所示,由图可知,未施加气流时,排肥口处肥料颗粒的平均速度在2.2 m/s左右,施加气流后,排肥口处肥料颗粒的平均速度提高到2.6 m/s左右,肥料颗粒的动能可以通过式(8)进行计算。
因此肥料颗粒的动能变化量可以通过式(9)计算得出:
式中Δ为施加气流前后颗粒动能变化量,%;1为未施加气流的颗粒动能,J;2为施加气流后颗粒动能,J。
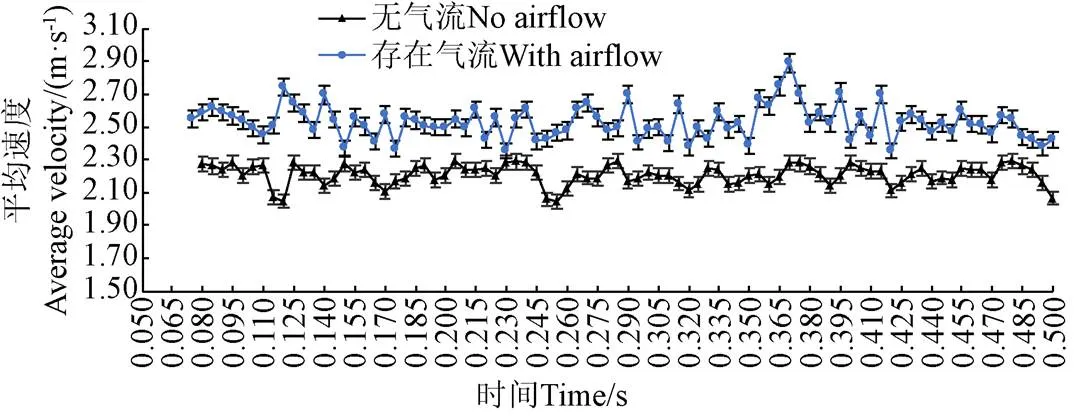
图6 颗粒平均速度随时间的变化曲线
将肥料颗粒的平均速度V代入式(8)~(9)可得:肥料颗粒的动能相比未施加气流时提高了约39.7%,说明气流能够一定程度提高肥料颗粒的动能,有效防止施肥管道出现堵塞。
3.1.3 气流分流管道的气流压力和速度分布情况
气流分流管道中气流压力及气流速度会对肥料颗粒的运动产生影响,从而影响施肥装置的防堵性能。在本文第2节中选取了3种内径不同的气流分流管道,分别是24、28和32 mm,为对比3种气流分流管道中气流压力及气流速度分布情况,暂选取进气口压力值1为800 Pa,对气流分流管道仿真模型进行流体力学仿真,采用ANSYS Fluent软件进行三维仿真,设置稳态计算方式,流体采用空气,边界条件设置进气口为压力入口,计算结果如图7和图8所示。
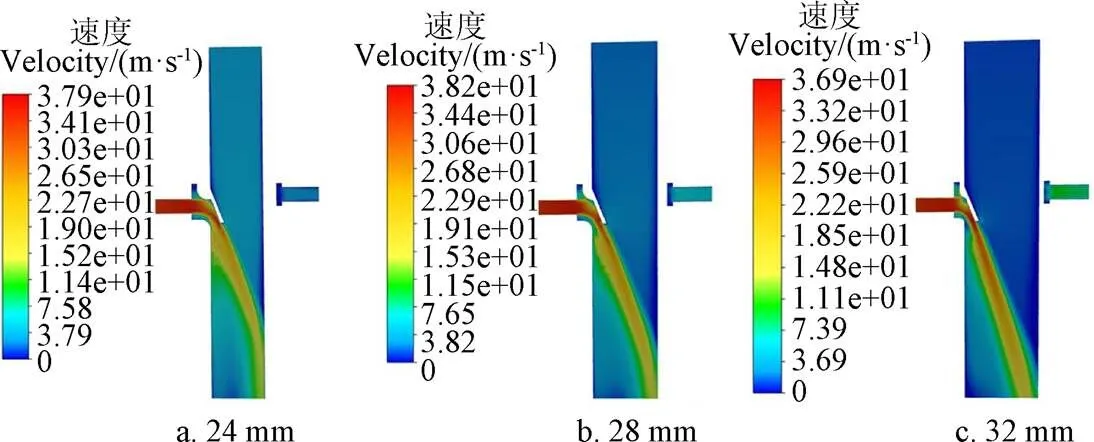
注:各小图题名后的值表示气流分流管道的内径。
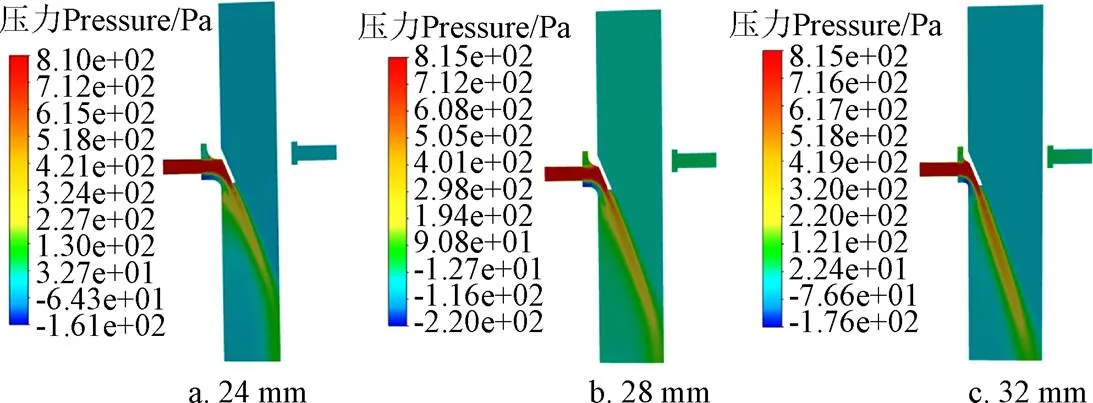
注:各小图题名后的值为气流分流管道的内径。
仿真结果表明,不同内径的气流分流管道的气流速度和压力分布存在一些差别。由图7可以看出,内径24和28 mm的结构在管道上半部分存在一个向下的气流速度,该气流速度可以和肥料颗粒混合形成气固两相流,辅助肥料颗粒排放从而提高施肥管道通畅性,而内径为32 mm的结构中该气流速度较小,且在出气口的气流速度偏大,达8~12 m/s,容易触发气流变化反馈装置,导致误监测报警,内径为28和24 mm的结构中出气口气流速度较为合适,在4~8 m/s范围内;在气流速度均匀性方面,内径为28 mm的结构要相对优于内径为24和32 mm的结构,有利于肥料颗粒的均匀排放。由图8可以看出,内径为24 mm结构的出气口处压降为大气压,压力损失较大,而内径为28和32 mm的结构出气口处压降相似。综上,在不同内径的气流分流管道内部,气流速度和压力的分布规律大致相同,仅关键区域的气流速度和压力的大小存在一些差别。
3.2 台架试验
3.2.1 试验装置
为了考察气流式施肥监测装置的性能,根据试验装置设计情况,对图1b中各部件进行加工,排肥器选用螺旋槽轮排肥器。在华南农业大学土槽实验室内的2BHD-10水稻直播机样机上进行台架试验,试验装置如图9所示。
3.2.2 试验方法
试验材料选用挪威雅苒颗粒状复合肥,粒径范围为1.5~4 mm。试验仪器包括鑫思特公司的HT-1891数字压力表(精度:0.01 kPa,量程:−34~34 kPa,);泰克曼公司的TM-856 风速测量仪(精度:0.01 m/s,量程:0.3~45 m/s);成都倍赛科公司的XH-30002电子秤(精度:0.01 g,量程:1~3 000 g)。

式中为试验总次数;为成功报警试验次数。
3.2.3 试验结果与分析
1)气压值预试验
根据仿真结果的分析,内径28 mm的气流分流管道结构气流分布均匀性较好,故选取内径为28 mm的管道进行气压值预试验。按照3.2.2节所述试验方法进行试验,气流分流管道的进气口气压值1选取500~1 000 Pa,梯度为100 Pa,每组试验重复50次,并对成功报警提示的试验次数进行统计,再根据式(10)计算出装置的报警准确率,试验结果如图10所示。结果表明,气压值在600~800 Pa范围内,该装置的准确率均达80%以上,但气压值1大于800 Pa时,准确率出现明显的下降趋势,主要是由于气压值1过大会造成出气口气流平均速度过大,导致气流变化反馈装置出现误报警,因此准确率下降。
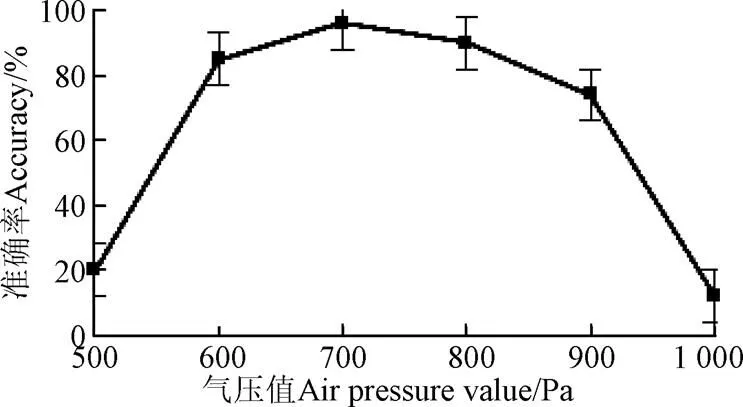
图10 监测准确率随气压值变化曲线
2)组合试验
为了确定装置多个参数的较优组合,选取气流分流管道内径和进气口气压值1因素进行试验。根据前文设计分析,分流管道内径选取24、28和32 mm,进气口气压值1选取600~800 Pa。考虑到装置的施肥速率不同,在出现堵塞后管道内的肥料颗粒堆积效果也不一样,堆积效果的好坏会影响出气口气流速度的大小,故添加施肥速率2因素进行试验。根据常规水稻需肥量农艺要求,单行施肥装置施肥速率2选取10~30 g/s。选用Box-Behnken响应面试验设计方法[28],试验因素及水平如表3所示。
以装置的堵塞报警准确率v为评价指标,根据因素和评价指标设计试验方案,试验共17组,每组试验重复50次。试验方案与结果如表4所示,将结果输入Design-Expert 软件,通过分析得到回归模型和显著性分析结果,如表5所示。
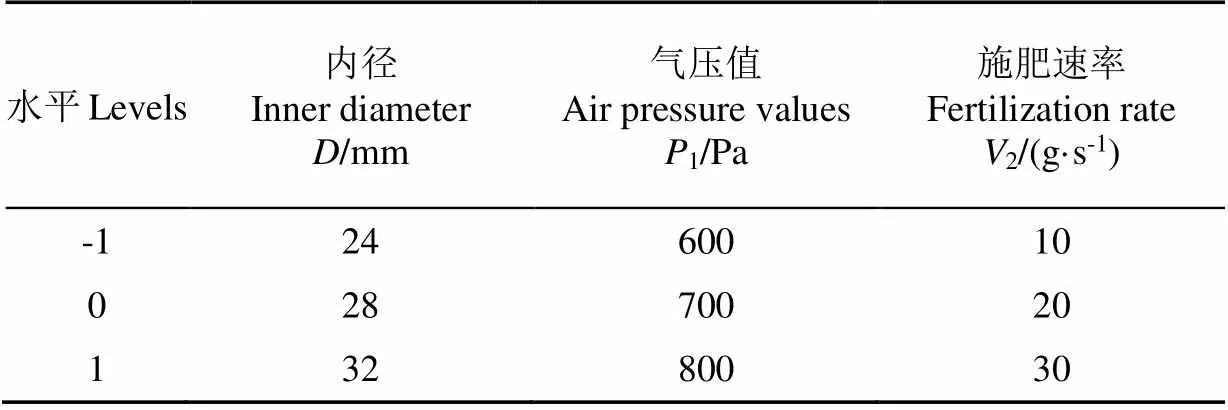
表3 试验因素表
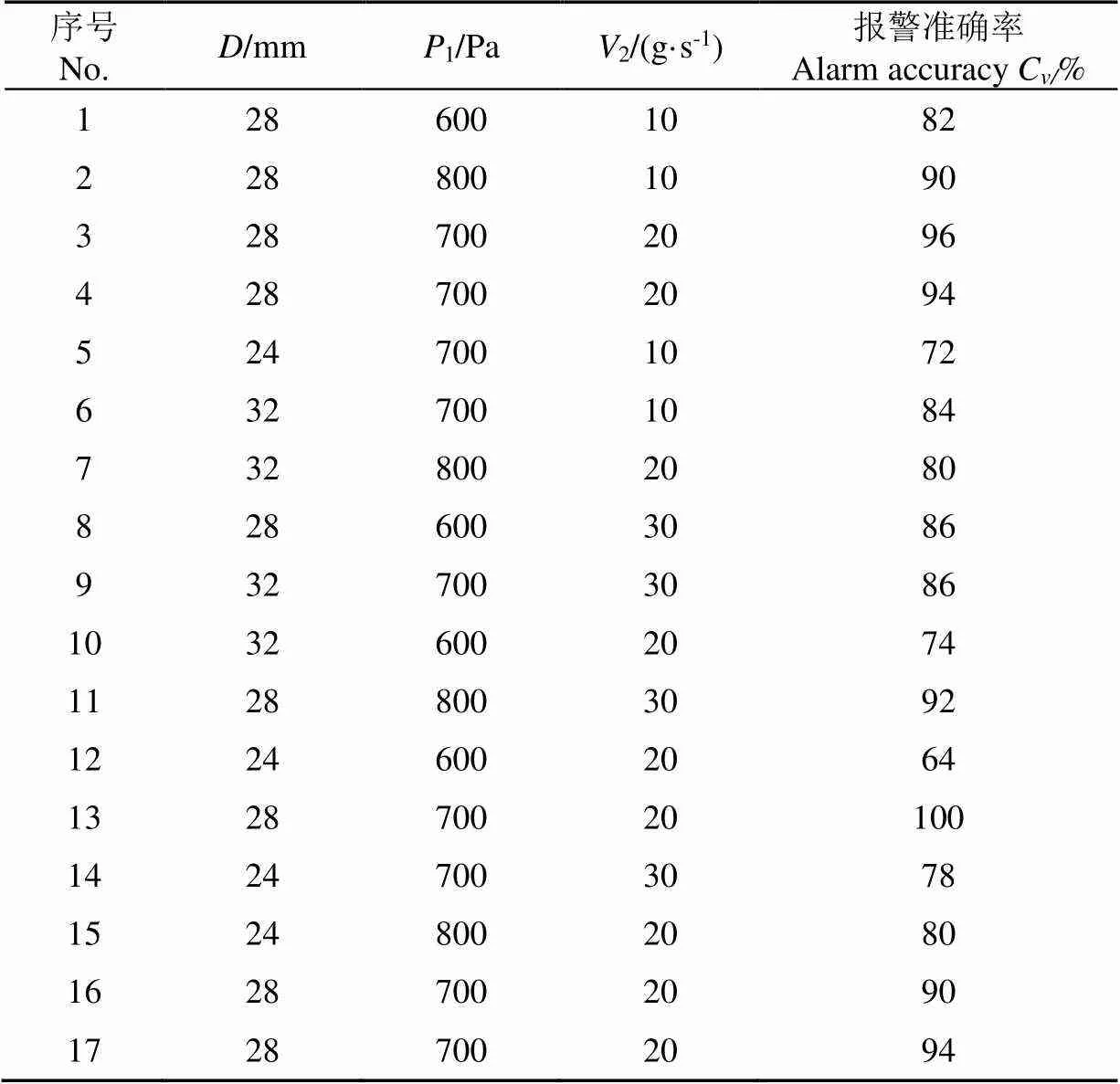
表4 试验方案与结果
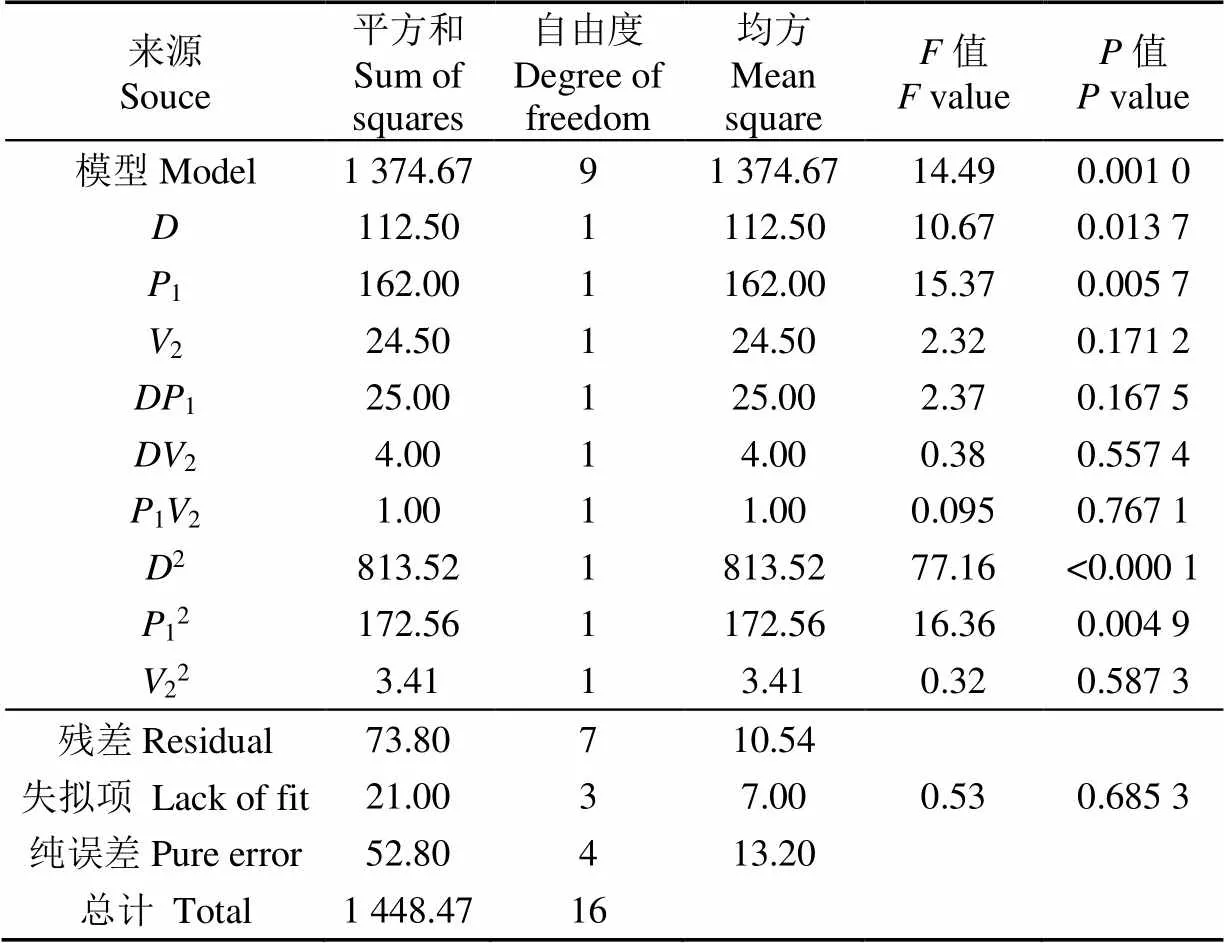
表5 结果分析
注:<0.01(极显著),0.01≤<0.05(显著)。
Note:<0.01 (extremely significant), 0.01≤<0.05 (significant).
准确率与各因素水平值(1,2,3)之间的回归方程为
=94.80+3.751+4.502+1.753−2.5012−1.0013−
0.5023−13.9012−6.4022−0.9032(11)
回归方程决定系数2=0.949 0,说明回归方程拟合度较高,模型的<0.01,说明回归模型极显著;模型失拟项的>0.05,说明失拟项不显著,不存在其他主要因素影响结果。
任意两因素作用对准确率的影响如图11所示,由图11可知,随着气压值的逐渐增大,堵塞报警准确率出现先增大后缓慢减小的变化趋势,其原因是气压值过小会无法触发气流变化反馈装置;过大会触发气流变化装置导致误报警,从而准确率下降,所以最优气压值在中间选取。随着管道内径的增大,准确率出现先增大后减少的变化趋势,其原因是内径偏小时,出现堵塞时肥料颗粒的堆积效果欠佳,所以最优管道内径在中间选取。随着施肥速率的增大,准确率的变化幅度很小,说明施肥速率对试验结果的影响较小,综上,结合回归模型及响应面的变化情况,选取内径28 mm,气压值700 Pa,以及施肥速率20 g/s为装置较优工作参数。
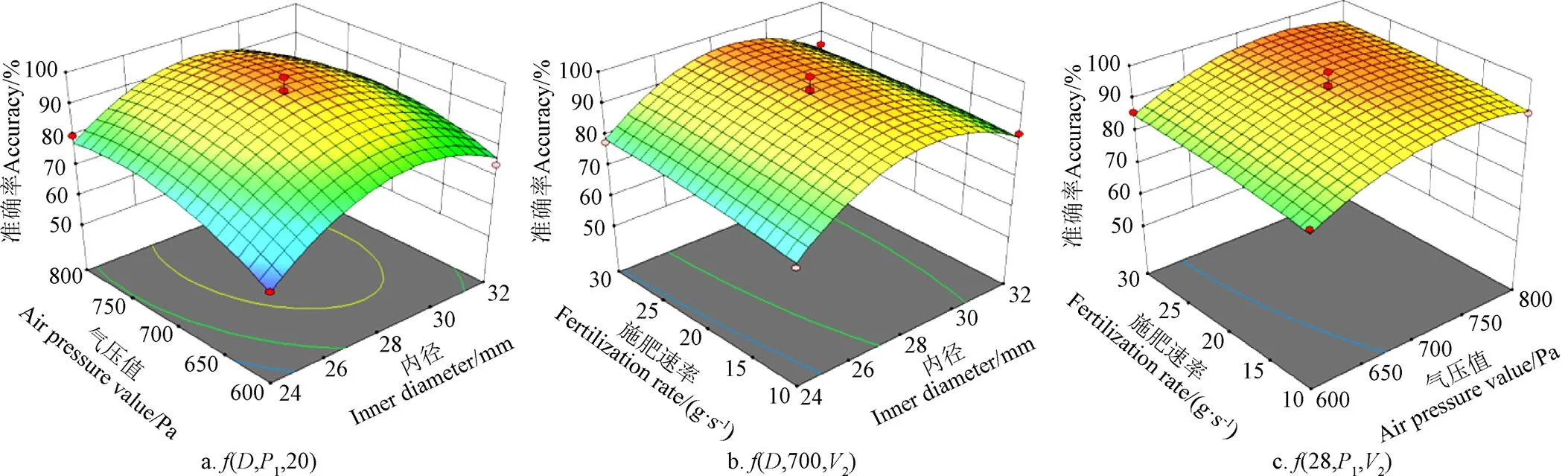
图11 两因素作用下对堵塞报警准确率的影响
4 田间试验
田间工作时,考虑到机具作业时会对装置的稳定性,可靠性产生一定的影响,为验证气流式施肥堵塞监测装置的性能,于2022年8月在华南农业大学增城教学基地进行田间试验,见图12。地块为旋耕平整后的地块,样机上安装有3套气流式施肥监测装置,对应3行施肥装置,装置选取较优工作参数进行试验,即气流分流管道内径28 mm,气压值700 Pa,以及施肥速率20 g/s。试验时,将排肥管道出肥端人为堵塞,启动施肥装置,设定机具前进速度为1.0 m/s,查看装置施肥是否成功报警,对试验进行多次重复。试验结果如表6所示,3行施肥装置报警准确率均大于90.0%,最高达96.7%,装置工作稳定性好,未出现装置失灵情况。

图12 田间试验
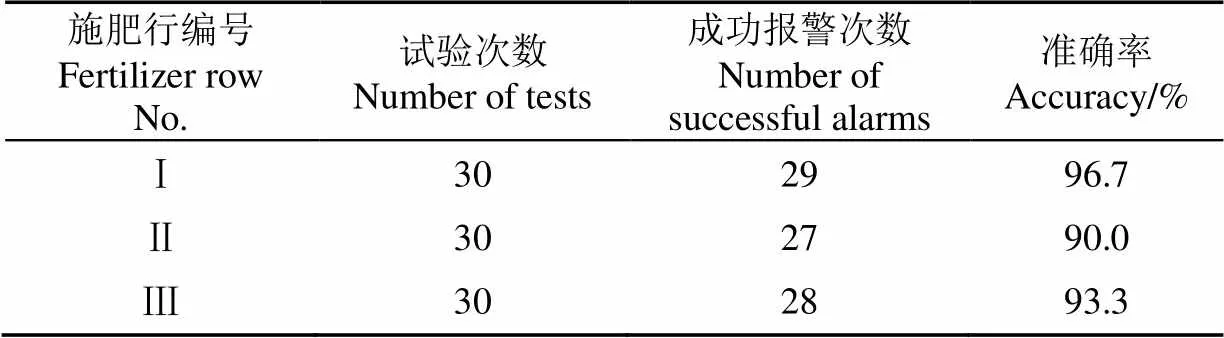
表6 试验结果
5 结 论
1)设计了一种水稻直播机气流式施肥监测系统,阐述了其工作原理并确定了关键部件气流分流管道和气流变化反馈装置的结构参数,并通过参数标定试验确定气流分流管道的进气口气压值应小于1 000 Pa。
2)采用计算流体力学和离散元法耦合仿真方式,对关键部件气流分流管道内的颗粒和气流运动状态进行模拟仿真,仿真结果表明进气口气压值为800 Pa时,肥料颗粒的动能提高约39.7%,有利于减少施肥堵塞的发生。
3)在台架试验中,采用Box-Behnken响应面试验确定较优工作参数为气流分流管道内径28 mm,进气口气压值700 Pa,以及施肥速率20 g/s。选用较优工作参数进行田间试验,结果表明:报警监测准确率均达90.0%以上,并且装置稳定性好,未出现装置失灵情况,可满足水稻施肥装置堵塞监测准确率要求。
[1] 中华人民共和国农业农村部. 全国水稻生产机械化十年发展规划2006-2015年[EB/OL].[2006-11-09]. http://www. moa.gov.cn/gk/ghjh_1/201006/t20100606_1534739.htm.2006.
[2] 张福锁,王激清,张卫峰,等. 中国主要粮食作物肥料利用率现状与提高途径[J]. 土壤学报,2008,45(5):915-924.
Zhang Fusuo, Wang Jiqing, Zhang Weifeng, et al. Current status and ways to improve fertilizer utilization of major food crops in China[J]. Journal of Soil Science, 2008, 45(5): 915-924. (in Chinese with English abstract)
[3] 白由路. 高效施肥技术研究的现状与展望[J]. 中国农业科学,2018,51(11):2116-2125.
Bai Youlu. Status and prospect of research on efficient fertilizer application technology[J]. Chinese Agricultural Science, 2018, 51(11): 2116-2125. (in Chinese with English abstract)
[4] 唐汉,王金武,徐常塑,等. 化肥减施增效关键技术研究进展分析[J]. 农业机械学报,2019,50(4):1-19.
Tang Han, Wang Jinwu, Xu Changsuo, et al. Research progress analysis on key technology of chemical fertilizer reduction and efficiency increase[J]. Transactions of the Chinese Society for Agricultural Machinery, 2019, 50(4): 1-19. (in Chinese with English abstract)
[5] 谷洁,高华. 提高化肥利用率技术创新展望[J]. 农业工程学报,2000,16(2):17-20.
Gu Jie, Gao Hua. Prospects on the technical innovation to increase fertilizer use efficiency[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2000, 16 (2): 17-20. (in Chinese with English abstract)
[6] 杨青林,桑利民,孙吉茹,等. 我国肥料利用现状及提高化肥利用率的方法[J]. 山西农业科学,2011,39(7):690-692.
Yang Qinlin, Sang Limin, Sun Jiru, et al. Current situation of fertilizer utilization in China and ways to improve fertilizer utilization rate[J]. Shanxi Agricultural Science, 2011, 39(7): 690-692. (in Chinese with English abstract)
[7] Peng X L, Yang Y M, Yu C L, et al. Crop management for increasing rice yield ang nitrogen use efficiency in northeast China[J]. Agronomy Journal, 2015, 107(5): 1682-1690.
[8] 付宇超,袁文胜,张文毅,等. 我国施肥机械化技术现状及问题分析[J]. 农机化研究,2017,39(1):251-255,263.
Fu Yuchao, Yuan Wensheng, Zhang Wenyi, et al. Analysis of the current situation and problems of fertilizer application mechanization technology in China [J]. Agricultural Mechanization Research, 2017, 39(1): 251-255, 263. (in Chinese with English abstract)
[9] 吕伟生,肖小军,肖国滨,等. 缓释肥侧位深施及用量对油菜产量和肥料利用率的影响[J]. 农业工程学报,2020,36(19):19-29.
Lyu Weisheng, Xiao Xiaojun, Xiao Guobin, et al. Effects of lateral deep application and dosage of slow-release fertilizer on yield and fertilizer utilization efficiency of rape[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2020, 36(19): 19-29. (in Chinese with English abstract)
[10] Zhu C H, Xiang J, Zhang Y P,et al. Mechanized transplanting with side deep fertilization increases yield and nitrogen use efficiency of rice in Eastern China[N/OL]. Scientific Reports, 2019, 9: 5653. https://doi.org/10.1038/s41598-019-42039-7
[11] 陈雄飞,罗锡文,王在满,等. 水稻穴播同步侧位深施肥技术试验研究[J]. 农业工程学报,2014,30(16):1-7.
Chen Xiongfei, Luo Xiwen, Wang Zaiman, et al. Experimental study of simultaneous lateral deep fertilization technology for rice hole sowing [J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2014, 30(16): 1-7. (in Chinese with English abstract)
[12] 左兴健. 风送式水稻侧深精准施肥装置设计与试验研究[D]. 杨凌:西北农林科技大学,2016.
Zuo Xingjian. Design and Experimental Research of Wind-Delivered Rice Side-Depth Precision Fertilizer Application Device[D]. Yangling: Northwest A&F University, 2016. (in Chinese with English abstract)
[13] 熊文江. 2BDF-12机械式强排侧深施肥水稻直播机改进设计[J]. 南方农机,2020,51(1):1-2.
[14] 王金峰,高观保,王金武,等. 叶片调节式水田侧深施肥装置设计与试验[J]. 农业机械学报,2018,49(3):68-76.
Wang Jinfeng, Gao Guanbao, Wang Jinwu, et al. Design and experiment of vane adjustment type paddy side depth fertilizer application device[J]. Transactions of the Chinese Society for Agricultural Machinery, 2018, 49(3): 68-76. (in Chinese with English abstract)
[15] 王金峰,尚文虎,翁武雄,等. 圆盘顶出式水田侧深施肥装置设计与试验[J]. 农业机械学报,2021,52(6):62-72.
Wang Jinfeng, Shang Wenhu, Weng Wuxiong, et al. Design and experiment of disc top-out paddy side depth fertilizer application device[J]. Transactions of the Chinese Society for Agricultural Machinery, 2021, 52(6): 62-72. (in Chinese with English abstract)
[16] 曾山,郑振晖,杨洲,等. 水稻直播机气流式分层施肥系统设计与试验[J]. 农业工程学报,2020,36(4):1-9.
Zeng Shan, Zheng Zhenhui, Yang Zhou, et al. Design and experiment of airflow type stratified fertilizer application system for rice direct seeding machine[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2020, 36(4): 1-9. (in Chinese with English abstract)
[17] 周利明,马明,苑严伟,等. 基于电容法的施肥量检测系统设计与试验[J]. 农业工程学报,2017,33(24):44-51.
Zhou Liming, Ma Ming, Yuan Yanwei, et al. Design and test of fertilizer mass monitoring system based on capacitance method[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2017, 33(24): 44-51. (in Chinese with English abstract)
[18] 陈幸,姬江涛,贺智涛,等. 玉米免耕变量施肥播种机作业质量监控系统设计与试验[J]. 农机化研究,2022,44(6):53-58.
Chen Xing, Ji Jiangtao, He Zhitao, et al. Design and experiment of no-till variable fertilizer seeder operation quality monitoring system for corn[J]. Agricultural Mechanization Research, 2022, 44(6): 53-58. (in Chinese with English abstract)
[19] 赵立新,张增辉,王成义,等. 基于变距光电传感器的小麦精播施肥一体机监测系统设计[J]. 农业工程学报,2018,34(13):27-34.
Zhao Lixin, Zhang Zenghui, Wang Chengyi, et al. Design of monitoring system of wheat precision sowing and fertilization integrated machine based on variable distance photoelectric sensor[J]. Transactions of The Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2018, 34(13): 27-34. (in Chinese with English abstract)
[20] 翟长远,杨硕,王秀,等. 农机装备智能测控技术研究现状与展望[J]. 农业机械学报,2022,53(4):1-20.
Zhai Changyuan, Yang Shuo, Wang Xiu, et al. Status and prospect of intelligent measurement and control technology for agricultural equipment[J]. Transactions of The Chinese Society for Agricultural Machinery, 2022, 53(4): 1-20. (in Chinese with English abstract)
[21] Kaoru A, Yasuo O. Wastewater treatment by using kenaf in paddy soil and effect of dissolved oxygen concentration on efficiency[J]. Ecological Engineering, 2007, 29(2): 125-132.
[22] 洋马株式会社,八鹿铁工株式会社. 施肥装置:200980146442,4[P]. 2014-06-18.
[23] 久保田株式会社. 施肥机:201220411889,9[P]. 2014-02-19.
[24] 吴苗苗. 水稻侧深施肥机的设计[D]. 杭州:浙江理工大学,2017.
Wu Miaomiao. The Design of Rice Side Deep Fertilizing Device[D]. Hangzhou: Zhejiang University of Technology, 2017. (in Chinese with English abstract)
[25] 陈春皓,张建路,李建平,等. 苹果采摘管道气力输送进风装置参数优化与试验[J]. 果树学报,2022,39(4):1-22.
Chen Chunhao, Zhang Jianlu, Li Jianping, et al. Optimization and experiment of parameters of pneumatic conveying air intake device for apple picking pipeline[J]. Journal of Fruit Trees, 2022, 39(4): 1-22. (in Chinese with English abstract)
[26] 顿国强,于春玲,郭艳玲,等. 双齿轮式排肥器设计与试验[J]. 农业机械学报,2020,51(3):87-96.
Dun Guoqiang, Yu Chunling, Guo Yanling, et al. Design and experiment of double-gear type fertilizer discharger[J]. Transactions of The Chinese Society for Agricultural Machinery, 2020, 51(3): 87-96. (in Chinese with English abstract)
[27] Chen H B, Zheng J F, Lu S J, et al. Design and experiment of vertical pneumatic fertilization system with spiral Geneva mechanism[J]. International Journal of Agricultural and Biological Engineering, 2021, 14(4): 135-144.
[28] 徐向宏,何明珠.试验设计与 Design-Expert、SPSS应用[M]. 北京:科学出版社,2010.
Design and experiments of the airflow type fertilizer application monitoring system for rice direct seeders
Zeng Shan1, Wei Silong1, Liao Mingming1, Zeng Li1, Chen Haibo2※
(1.,,510642,; 2.,,510642,)
Rice fertilizer application is often disturbed by the moisture or mud and water in the field, particularly, in the rainy and humid southern region of China. The complicated working environment can result in fertilizer clogging or leakage in the fertilizer application machinery. The photoelectric and capacitive sensors are often developed to monitor the fertilizer application blockage at present. However, the traditional sensors are susceptible to fertilizer dust during operation, resulting in reduced sensitivity and even monitoring failure, which cannot meet the actual production needs. In this study, an airflow anti-clogging and monitoring system was proposed for fertilizer application in the rice direct seeding machine. The agronomic requirements were combined with the fertilizer application in the direct seeding of southern rice. The smoothness of the fertilizer application pipeline was effectively improved to prevent fertilizer clogging. Once the fertilizer clogging occurred, the alarm alerts were run in the system simultaneously. Firstly, the working principle of the fertilizer application system was determined to design the key components, such as the airflow diversion duct and the airflow change feedback device. At the same time, the structural parameters were optimized for the key components of devices. A parameter calibration test was carried out to determine the air pressure value (1) of less than 1 000 Pa at the inlet of the airflow diversion duct. Secondly, a coupled simulation was carried out using Fluent and Rocky software. An experiment was then conducted to calculate the motion state of fertilizer particles with or without applied airflow in the airflow diversion duct of the key component. The test results showed that the velocity of fertilizer granules increased significantly under the action of airflow. The kinetic energy of the fertilizer granules increased by about 39.7%, compared with no airflow. It infers that the airflow effectively improved the smoothness of the fertilizer application pipeline. Finally, the prototype test was performed on the blockage monitoring and alarm performance of the device. The air pressure pre-test demonstrated that the air pressure of the air inlet should be taken as 600-800 Pa in the static test of the prototype. A combination of inlet air pressure, pipe inner diameter, and device fertilization rate was then tested to determine the optimal operating parameters of the device. The test protocol was designed by the Box-Behnken response surface method. After that, the regression model and the variation of the response surface were used to determine the inner diameter of the airflow diversion pipe of 28 mm, the air pressure value of 700 Pa at the air inlet, and the fertilizer application rate of 20 g/s, as the better working parameters of the device. The optimal combination of parameters was selected for the test in the field trials. Consequently, the accuracy of alarm monitoring was above 90.0%, and the highest accuracy was 96.7%. The better performance of the device was achieved in the stability, which fully met the requirement of clogging monitoring accuracy of the rice fertilizer device. The finding can provide an important reference for fertilizer application in the anti-blocking and blockage monitoring for rice production.
design; experiment; rice direct seeder; fertilizer application monitoring; Fluent-Rocky coupling
10.11975/j.issn.1002-6819.2022.17.003
S224.2
A
1002-6819(2022)-17-0022-09
曾山,魏斯龙,廖明铭,等. 水稻直播机气流式施肥监测系统设计与试验[J]. 农业工程学报,2022,38(17):22-30. doi:10.11975/j.issn.1002-6819.2022.17.003 http://www.tcsae.org
Zeng Shan, Wei Silong, Liao Mingming, et al. Design and experiments of the airflow type fertilizer application monitoring system for rice direct seeders[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2022, 38(17): 22-30. (in Chinese with English abstract) doi:10.11975/j.issn.1002-6819.2022.17.003 http://www.tcsae.org
2022-05-23
2022-08-11
国家重点研发计划项目(2021YFD2000403)
曾山,博士,副研究员,研究方向为水稻生产机械化技术及装备。Email:shanzeng@scau.edu.cn
陈海波,博士,高级实验师,硕士生导师,研究方向为农业机械智能化及信息化。Email:huanongchb@ scau.edu.cn
