数字化安培力演示仪设计
2023-01-03江绍明胡仲秋
江绍明,胡仲秋,方 飞,郑 其,陈 湘
(内江师范学院 物理与电子信息工程学院,四川 内江 641100)
0 引言
安培力作为自然界中一种非常重要的宏观力,是高中物理的一个重要知识点,高中教材中虽然给出了通过竖直悬挂的导体棒由于受到安培力后摆动的最大角度来计算安培力的大小,但摆动的角度难以精确测量.因此,中学生物理教学中一般很难较为精确的探究安培力L、I、B的关系.为方便、快捷的测定安培力,众多研究者设计了较多的装置,对现有仪器进行改进.如丁良峰[1]采用转换法,利用力矩平衡的原理,结合角度定位圆盘,定量研究了影响安培力各要素之间的关系;黄爱凤等[2]、黄庆琨等[3]、郑宇晴等[4]、邓兴龙等[5]将导线框或铜丝置于磁场中,通过电子天平测量其通电前后的质量,根据读数的变化探究安培力与各要素之间的关系;陈湘等[6]通过定滑轮将置于天平上的重物与磁场中的导体棒相连,测量通电前后重物的质量,利用静态平衡法定量分析安培力与L、I、B的关系;戴颖昱等[7]引入了力、电流和磁传感器,采用数字化实验的方式,完成了对安培力影响因素的探究,提高了实验效率.这些实验装置都实现了对安培力的定量研究,可帮助学生更好地认识理解,但每次实验均需手动记录实验数据,再录入电脑处理,进行绘图分析,课堂效率不高.
针对当前安培力演示仪存在的不足,本文设计一种新型的基于单片机的电子安培力演示仪.该设备是对实验室现有的基于静态平衡法的安培力测量装置进行改进,将现代电子技术融入到物理实验教学中.改进后的仪器不但可以通过液晶屏直接显示出安培力大小,还可通过语音方式播报当前所测安培力,利用程控电流源自动绘制F与I的关系曲线,直观地展示F与I的关系.
1 安培力测量实验教学装置
1.1 静态平衡法测量安培力的原理
静态平衡法测量安培力装置如图1所示.当导体棒通过轻质细线与置于精密电子天平上的砝码相连接时,由于砝码的重力远大于通电导体棒所受安培力,因此在通电前后置于磁场中的导体棒始终处于静止平衡状态,而所受安培力可通过高精度电子天平通电前后的示数m0、mi来反映.
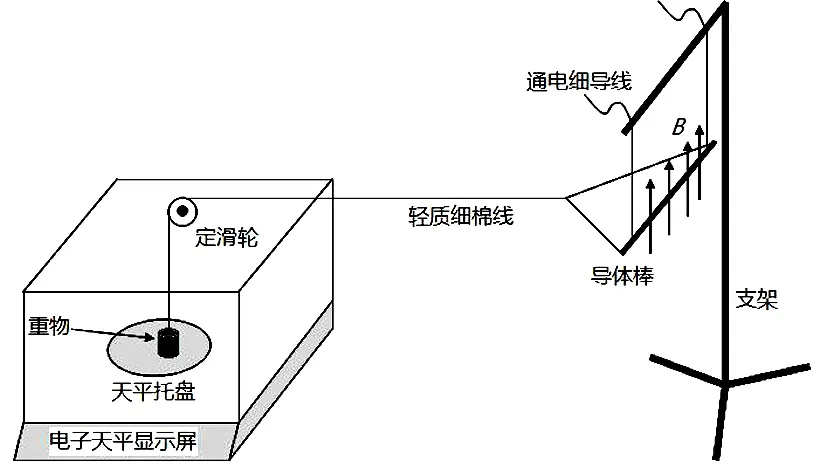
图1 静态平衡法测量安培力装置图[6]
处于磁场中的导体棒在通电细导线拉力T、重力G、砝码拉线的拉力F拉和安培力F安作用下处于静止平衡状态时,其受力分析如图2所示.
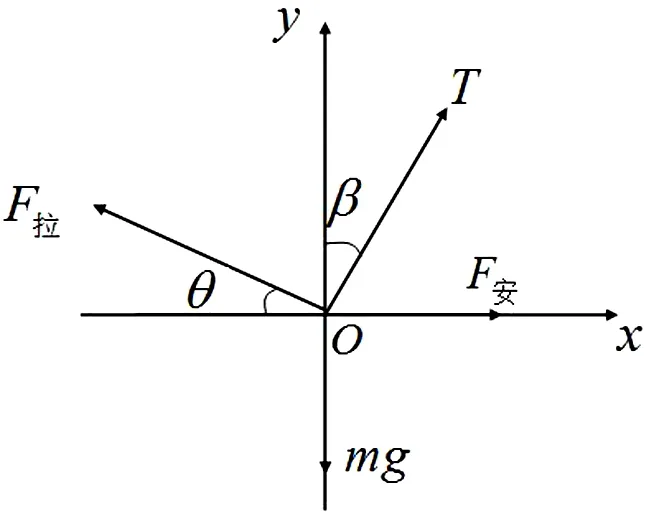
图2 导体棒在磁场中受力分析图[6]
对金属导体棒水平方向受力分析,可得:
F安=F拉cosθ-Tsinβ,
(1)
对式(1)进行全微分,有:
ΔF安=Δ(F拉cosθ-Tsinβ)=
ΔF拉cosθ+F拉Δcosθ-ΔTsinβ-TΔsinβ.
(2)
因导体棒通电前后始终保持静止平衡状态,即θ、β、T都不变,再根据常数微分为零,则有Δcosθ、ΔT、Δsinβ均等于零.若测试中,调整至θ=0,即cosθ=1,则式(2)可简化为:
ΔF安=ΔF拉=|(m0-m)*g|.
上式成立的核心条件:系统处于静止状态,且θ=0.
1.2 基于单片机的安培力测量实验仪
为充分利用实验室内现有的安培力演示仪,另外考虑到机械装备设计的复杂度,在设计中并不改变物理实验教具的结构[6],只在图1的基础上增加单片机控制模块,通过串口读取FA2104电子分析天平测得的质量,对读取的数据进行计算、显示,画出F与I的曲线,并对安培力进行语音播报.在单片机系统设计中,还增加程控恒流源来取代传统的直流源,通过按键调节流过导体棒的电流,并实时采样电流I,实现对F-I曲线的自动测量.
2 安培力测量仪控制系统
2.1 系统硬件电路
系统中增加了单片机控制模块,主控芯片MCU采用STM32单片机,外围电路包括键盘、液晶、恒流源和语音播报模块(见图3).实验室原有安培力测量仪的测量工具是FA2104电子分析天平,该天平称量范围为210 g,精度0.1 mg,具有RS232输出接口,通过串口线可将称量的数据传入计算机.设计中利用串口调试助手获取通信协议,再将协议写入STM32控制器,实现STM32与电子天平的数据通信.恒流源电路选用“运放 + 三极管(大功率)”,结合STM32单片机自带的AD、DA功能构成恒流源,输出范围为0~2.5 A,利用按键可控制输出电流大小.语音播报选用CN-TTS 语音合成模块,实现中文、英文、数字的语音合成.显示部分采用3.5寸TFTLCD,结合嵌入式GUI-LittlevGL可获得较好的视觉效果.
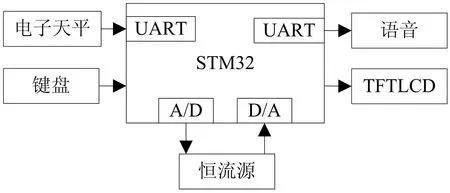
图3 安培力测量演示系统框图
2.2 系统软件算法
2.2.1 软件设计流程
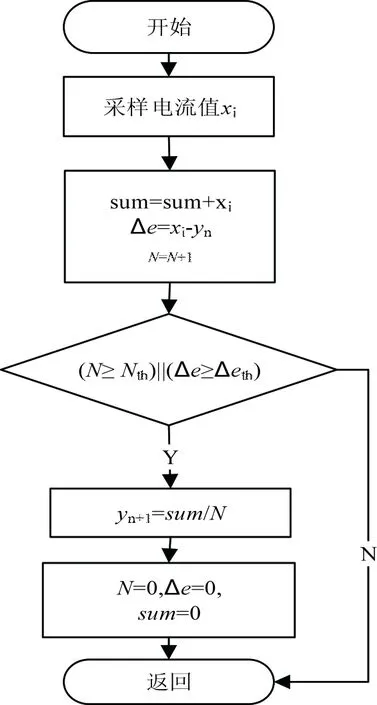
系统的软件主要包括:主程序、按键检测、A/D、D/A、UART通信、语音播报、曲线绘图等子程序模块,软件流程如图4所示.
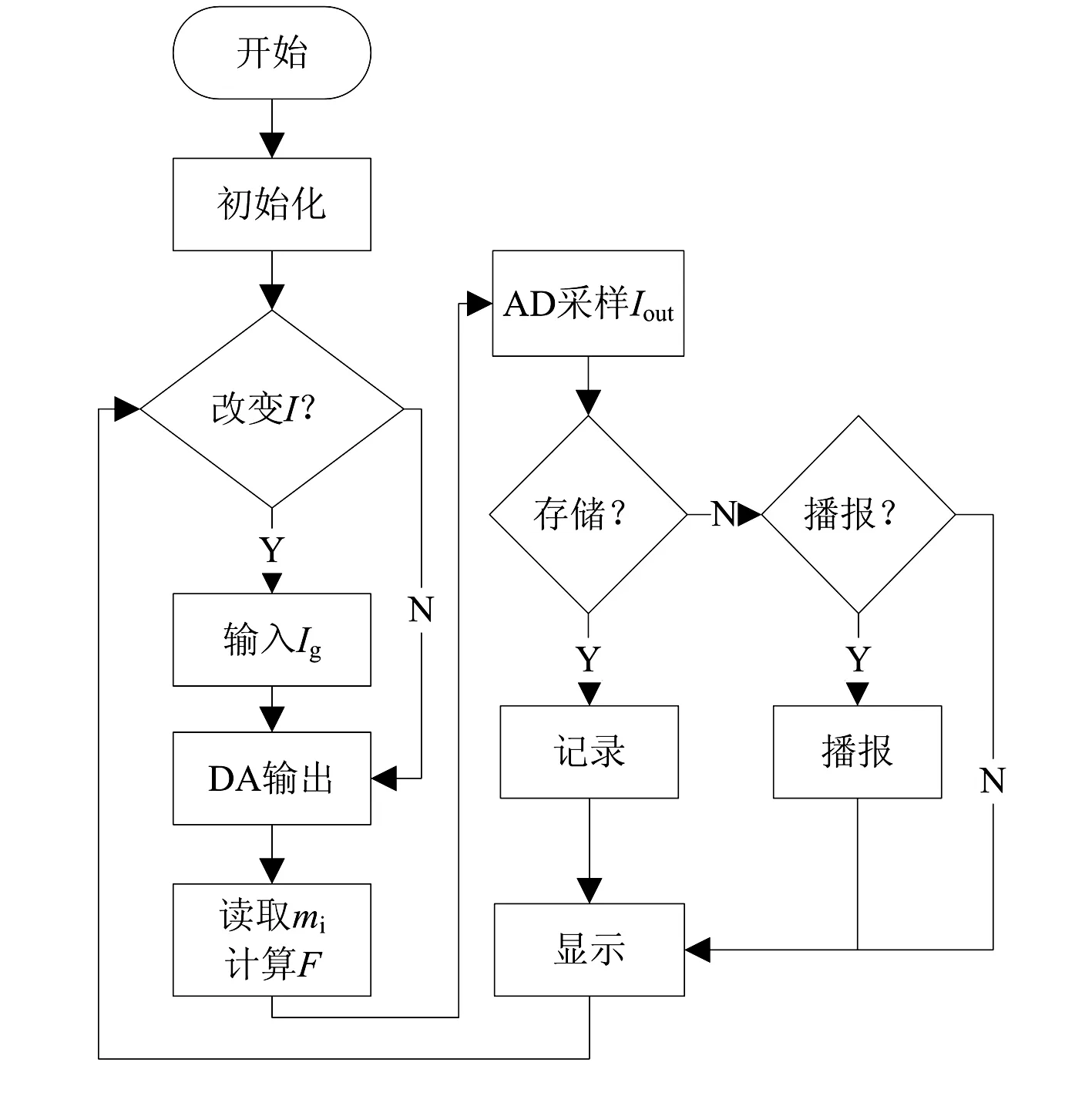
图4 软件流程图
系统上电后首先进行各模块的初始化设置,其中I=0,即磁场中的导体棒不通电,通过UART通信读取电子天平FA2104上的数据m0.该数据为电子天平上砝码的重量,该值为后续安培力计算提供基准.进行安培力测量时,先由键盘输入电流Ig,通过D/A转换输出电压控制恒流源,并在恒流源的输出端经A/D采样测量实际电流Iout,同时读取电子天平的值mi、计算F,液晶实时显示F和Iout.待电流稳定后,根据需要选择是否进行语音播报或数据存储,利用记录的几组数据即可在液晶完成曲线绘制.
2.2.2 电流检测算法
本系统通过导体棒的电流由程控恒流源提供,电流的调节可通过按键完成,即I=Ig.为保证测量的准确性,电流I的值由实际的输出电流Iout提供;因此对Iout检测的准确性直接决定了该系统的性能,而恒流源的设计范围为0~2.5 A,其动态范围较宽.这就要求在测量时,不仅要满足精度要求,还应有良好的动态响应速度.为满足上述要求,将电流的检测分为两个阶段[8].
(1)稳定阶段.在电流不变或变化幅度小的阶段,直接采用算数平均法进行滤波处理.
设
xi=fi+ei,
(3)
式中:xi为单片机实时采样的电流值,该值包含了稳定值fi和随机值ei.
当xi在某一数值范围附近上下波动时,可代入
(4)
式中,Nth为滤波器长度的最大值,其值取决于显示的刷新频率f0和电流的采样频率fs,即
该方法能削弱随机噪声的影响,降低测量误差.
若fs=100 Hz,f0=1 Hz时,Nth=100,表示单片机每隔10 ms采样一次电流xi;同时N加1,当计到100时,代入式(4)计算yn+1,即每秒更新一次输出电流,此时N=Nth.
(2)变化阶段.当电流变化较大时,每秒更新一次数据无法及时反映出电流的变化,可改用增量累加法,自适应调整滤波器的长度N.方法如下:
令Δei=xi-yn,yn为经滤波处理后的当前时刻输出电流值,Δei为采样值与输出值的差值,则累计差值可表示为:
(5)
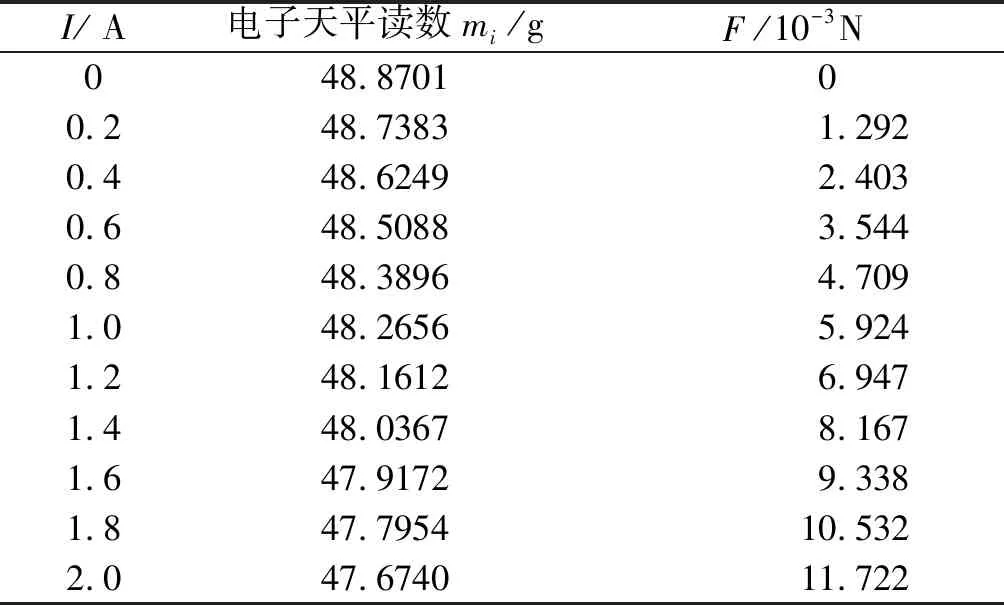
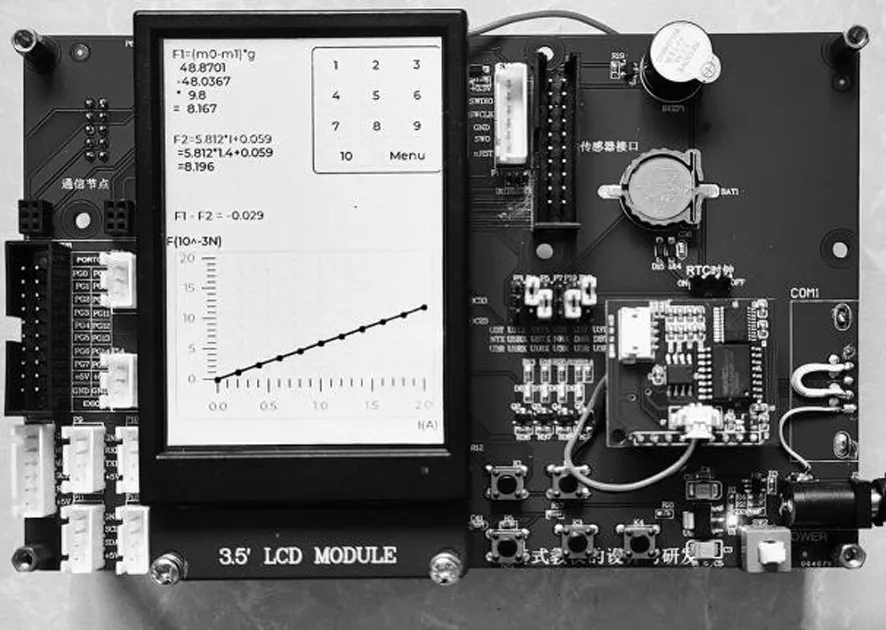
短时间内,电流变化越大,Δe越大.当Δe≥Δeth时,运用式(4)计算yn+1,此时N 根据绝对值不等式,有 |Δe1+Δe2+…+ΔeN|≤ |Δe1|+|Δe2|+…+|ΔeN|, 可得Δeth≤1. 算法实现流程如图5所示.当电流采集次数大于100或增量累计值Δe≥Δeth,更新输出电流值,达到自适应调整整滤波器的长度N,既减小了测量误差,也满足了动态响应速度要求. 图5 电流检测算法流程图 利用实验室已有的教具材料,结合单片机控制板,对安培力测量装置进行重新组装,得到如图6所示的实物图.将导体棒置于磁场中心正上方较小的高度处,近似保证磁场方向垂直于电流方向,保持导体棒在磁场中的位置及导体棒长度L=9 cm不变,调节电流导线连接方向,保证安培力方向水平向右,即通电后天平读数减小,初始状态下,导体棒未通电时电子天平读数m0=48.8701 g.通过按键改变导体棒通电电流Ig,在测试过程,让电流Ig每次增加0.2 A,单片机控制模块自动测量出一组安培力与电流的数据,如表1所示. 图6 安培力测量装置实物图 表1 安培力与电流关系对应数据 表1中的电流I是通过高精度A/D检测的恒流源输出,即I=Iout,F为通过电子天平测量计算出的安培力大小.根据测量数据,在液晶上绘制F-I曲线,如图7所示.其中F1即表1中的F,F2是根据表1的测量数据利用最小二乘法拟合的曲线.从拟合的结果看,F与I有很好的线性关系,且在横坐标上截距很小,反应出该仪器具有精度高的特点.经多次测量发现,截距为0.059±0.007,稳定性好.鉴于液晶的分辨率较小,且F1与F2差值很小,因此所绘制的两条曲线几乎重叠,难以分辨.可通过点击屏幕右上角的矩阵键盘,查看和播报不同I下的F1、F2以及二者的差值.按键1-10分别对应表1中记录的10组测量数据,即电流I从0.2~2.0 A变化. 图7 F-I曲线绘制图 该实验教学装置体系也可用于测量F-B和F-L的关系曲线,但每次B或L的改变值均需按键输入,单片机无法直接自动采集数据,只能根据输入值,测量并记录F,再利用最小二乘法进行曲线拟合. 本文从优化现有物理实验教具出发,将智能化的电子技术融入到基于静态平衡法测量安培力的实验平台中.改进后的实验装置具有如下特点: (1)加入单片机控制,实现了对F-I的自动测量、记录、播报及曲线绘制. (2)引入智能控制算法,保证了程控电流I的精度,多次测试结果表明F与I不仅具有较好的线性关系,且测试数据稳定. (3)该实验装置显示直观,测量快速方便,提高了课堂效率的同时,还使得学生的参与面提升,参与度提高,有利于激发学生学习兴趣,培养其科学探究精神,具有很好的推广应用价值.
3 实验验证

4 结论
