基于电流半波差异的单相四象限整流器开路故障诊断
2022-11-25伍珣李凯迪田睿于天剑
伍珣,李凯迪,田睿,于天剑
(1.中南大学 交通运输工程学院,湖南 长沙,410075;2.深圳地铁集团,广东 深圳,518040;3.国网湖南超高压变电公司,湖南 长沙,410004)
为了降低输电线路用材,节约运营成本,铁路接触网采用单相交流电的形式为电力机车以及动车组等列车进行供电。作为列车的电能变换装置,单相四象限整流器在能量传递中起着重要作用。
整流器通常采用电力电子器件(如IGBT)与反并联二极管构成单相桥式整流电路,具有能量双向流动、恒定输出直流电压、低谐波网侧输入电流、滤波器容量小以及高功率因数等优良性能。然而,由于电力电子器件控制的复杂性、操作失误、器件老化、环境干扰以及机械振动等原因,整流器不可避免地会出现各种故障,如IGBT内部模块烧损、IGBT 模块振裂以及线路松动和接触不良等。这些故障主要表现为开路故障。对于整流器而言,IGBT 开路故障将导致直流侧电压幅值降低、脉动增大、功率因数下降,以及网侧输入电流畸变。对于整个变流系统而言,IGBT 开路故障会造成网侧谐波含量上升,同时严重影响直流侧负载的正常工作,给整个系统带来极大的安全隐患。在整流器发生开路故障后,需要尽早采取相应的应急措施,以避免二次故障的发生,减少不必要的损失。因此,实时的开路故障诊断显得至关重要。
目前,学者们针对不同拓扑结构的整流器开路故障诊断进行了研究。针对单相四象限整流器开路故障,GOU等[1-2]提出一种基于混合逻辑动态模型和残差的诊断方法,该方法诊断速度较快,但是需要从控制系统中获取开关状态以及相关测量参数。此外,苟斌等[3]对整流器传感器故障以及容错控制方法也进行了研究。BEN YOUSSEF 等[4]通过电流观测值与测量值的残差以及自适应阈值实现对单相四象限脉冲整流器开路故障的诊断,同样地,该方法也需要获取控制信号才能完成诊断。XIA等[5]提出了一种基于滑模观测器的诊断方法,该方法可以对由传感器故障导致的器件控制问题进行诊断。POON等[6]采用基于模型的状态估计方法对四象限整流器的故障进行了分类。XIE等[7-8]提出一种基于状态估计和归一化检测变量的故障诊断方法,该方法通过控制信号来计算电压与电流的残差,从而实现故障定位。欧健[9]采用小波变换对四象限整流器输出电压进行特征提取,并利用神经网络完成对故障的分类。夏金辉[10]采用滑模观测器监测电流与电压的残差,对四象限整流器的故障进行分类并提出了容错控制方法。蒲俊楷[11]针对四象限整流器开路故障提出了一种基于混合逻辑动态模型的诊断方法,相似地,该方法同样基于网侧电流残差的分析且需要获取系统控制信号。
针对三相PWM 整流器开路故障,WU 等[12-14]提出一种基于电流相似分析的故障诊断方法,该方法通过对三相电流以及基波频率进行特征分析,可以实现多个IGBT的故障诊断。王磊[15-17]对三相电压型脉冲宽度调制(PWM)整流器的开路故障特征进行了分析,并提出了基于标幺化均值的故障诊断方法。SHI等[18]提出一种基于三相瞬时电流畸变的开路故障诊断方法,该方法在负载变动过程中具有一定的鲁棒性。MOOSAVI等[19]针对混合动力电动汽车中的三相整流器,提出一种基于人工神经网络的故障诊断方法,该方法结合快速傅里叶变换(FFT)与模式识别实现故障的分类,在诊断之前需要大量样本来对神经网络进行训练。XU等[20]通过基于稀疏自编码的深度神经网络实现了对三相整流器的故障诊断,同样地,该方法采用大量样本对模型进行训练,需要较高性能的处理器完成计算。TIAN等[21]提出一种基于电流核密度估计的故障诊断方法,能够有效对三相整流器故障进行分类。宋佩云等[22-23]针对航空三相PWM整流器分别提出了不同的基于模型分析的开路故障诊断方法。其他学者也对三相整流器的开路故障诊断方法进行了探讨[24-28]。
此外,CASEIRO 等[29]针对三电平中点钳位型整流器提出了基于瞬时电压误差的开路故障诊断方法,该方法对于诊断变量要求较多,需要同时获取三相电压与电流、直流侧电压以及控制信号,实用性较低。PENG等[30]则提出了一种统一建模的方法,该方法可以描述三电平中点钳位型整流器正常或故障时的模型,能够实现开关管的故障诊断。王沈晟[31]针对三电平中点钳位型整流器提出了一种基于电流路径的开路故障诊断方法,该方法需要在直流侧注入电流,并结合控制信号完成诊断。CHENG 等[32-33]采用输入与输出电压作为诊断变量对三段桥式整流器开路故障进行诊断,并提出了相应的容错控制方法。王飞月[34]针对单相半控桥式整流电路提出了一种基于贝叶斯网络的故障诊断方法。LEE等[35]对T型整流器开路故障进行了研究,并提出了一种基于空间向量的诊断方法,该方法需要同时获取网侧三相电压与电流来进行特征提取。此后,LEE 等[36]将该方法在VIENNA整流器的故障诊断中进行了拓展。
从已有的研究来看,学者们大都是在观测变量较多的条件下开展故障诊断研究。实际上,列车整流器的可观测变量有限:输入端仅一个电流传感器用于测量网侧电流,输出端仅一个电压传感器用于测量支撑电容器电压,而考虑到系统稳定性与可靠性问题,控制信号通常不对外开放。在这种条件下,多数故障诊断方法在应用中可能面临诊断变量缺失的问题。同时,与列车整流器IGBT 反并联的二极管同样存在开路故障的可能,且反并联二极管的开路故障与IGBT开路故障极为相似,给系统安全运行带来严重影响。然而,这两类故障的联合诊断还未受到人们的重视。因此,本文作者结合列车整流器的实际情况开展开路故障诊断研究,在仅采用一个电流传感器的条件下,实现IGBT与反并联二极管的开路故障准确识别与定位,并通过dSPACE实验平台对方法的有效性进行了验证。
1 工作原理与故障分析
单相电压型两电平单相四象限脉冲整流器的主电路拓扑如图1所示。其中,T1,T2,T3以及T4为单相四象限脉冲整流器IGBT器件;D1,D2,D3以及D4为反并联二极管;LN为网侧电感,RN为网侧电阻;LS为二次滤波电感;CS为二次滤波电容;Cd为直流侧支撑电容,常采用多个电容器串、并联的形式;R为负载电阻;L为负载电感;uN为网侧输入电压;iN为网侧输入电流;uUV为交流侧输入电压;is为流过二次滤波电路的电流;iR为流过负载的电流;iC为流过直流侧电容的电流;Ud为直流侧电容电压;id为直流侧电流。

图1 单相四象限脉冲整流器主电路Fig.1 Main circuit of single-phase four quadrant rectifier
定义单相四象限脉冲整流器U 相与V 相的开关函数SU和SV如下:

1.1 IGBT开路故障分析
正常工况下,单相四象限整流器(下面简称整流器)的直流侧电压输出恒定在某一电压范围,网侧输入电流的相位与网侧电压的相位基本一致,呈正弦波周期性变化。由于载波频率影响,网侧输入电流存在一定谐波,谐波含量与载波频率的高低有关。
当T1发生开路故障时,可能受影响的控制状态有SU=1,SV=1 与SU=1,SV=0。其中,网侧输入电流iN受故障的影响最为明显。
当SU=1,SV=1 时,VT1开路故障下的整流器等效电路如图2所示。由于VT1发生故障,原本经T1和D3形成的电流回路变为经D3、直流侧电容以及D2的电流回路。此时,网侧电压和电感LN向直流侧电容和负载释放能量,电流幅值相比正常工况时减小。

图2 T1故障时的整流器等效电路Fig.2 Equivalent circuit of single-phase four quadrant rectifier when T1 fails
当SU=1,SV=0 时,由于VT1发生故障,原本经T1和T4形成的电流回路变为经T4和D2的电流回路,直流侧电容与负载形成电流回路。此时,网侧电压直接加在电感LN两端,对电感进行充电,电流幅值减小。
由以上分析可以看出,在T1开路故障时,网侧输入电流iN在负半周的电流幅值相对正常工况时有所减小。
当T2发生开路故障时,可能受影响的控制状态有SU=0,SV=1 与SU=0,SV=0。同样地,网侧输入电流iN受到较大影响。
当SU=0,SV=1 时,T2开路故障下的整流器等效电路如图3 所示。由于T2发生故障,原本经T2和T3形成的电流回路变为经D1和T3形成电流回路。此时,直流侧电容与负载形成电流回路,仅由网侧电压对电感LN充能,电流iN的充能速率明显降低。
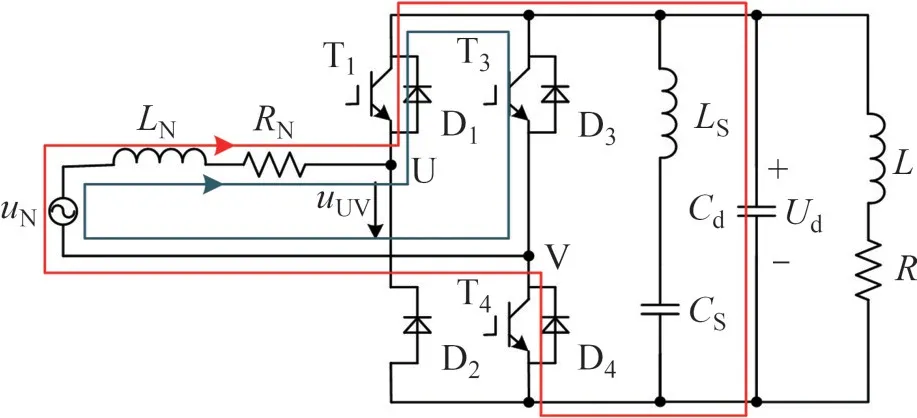
图3 T2故障时的整流器等效电路Fig.3 Equivalent circuit of single-phase four quadrant rectifier when T2 fails
当SU=0,SV=0 时,由于T2发生故障,原本经T2和D4形成的电流回路变为经D1、直流侧电容以及D4的电流回路。此时,网侧和电感LN向直流侧电容和负载释放能量,电流幅值相比正常工况时减小。
由此可知,当T2发生开路故障时,网侧电感的能量在充能阶段减少甚至释放,进而导致网侧输入电流在正半周的幅值总体呈减小趋势。
类似地,可以推导出T3开路故障与T2开路故障具有相似的特征,T4开路故障与T1开路故障具有相似的特征。
1.2 反并联二极管开路故障分析
当D1发生开路故障时,整流器等效电路如图4所示。若电流方向为负,即电流流经T1或D2,则此时D1开路不会对四象限整流器的正常运行产生影响。若电流方向为正且T2导通,则电流会经过T2流入整流器,D1开路故障同样不会影响整流器的正常运行。当电流方向为正且T2不导通时,电流无法经整流器形成回路。此时,电流iN接近于0 A,同时在网侧会伴随有较高的脉冲电压,对整流器其他IGBT会产生极大的冲击。因此,D1开路故障会导致电流iN在正半周的电流幅值大幅降低。
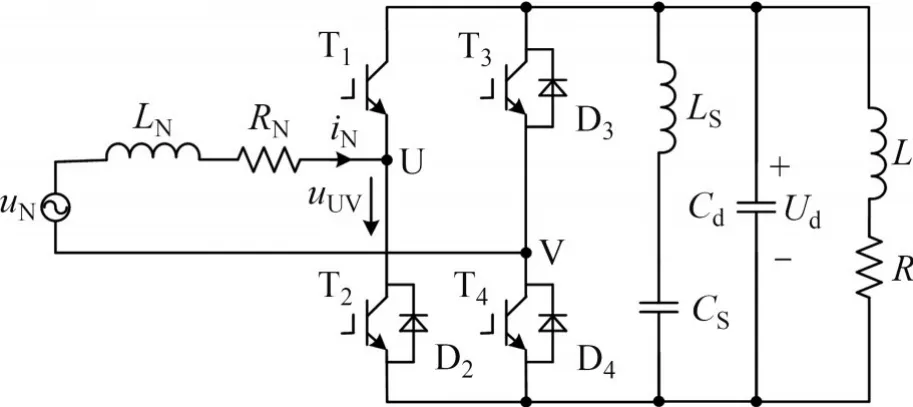
图4 D1故障时的整流器等效电路Fig.4 Equivalent circuit of single-phase four quadrant rectifier when D1 fails
当D2发生开路故障时,整流器等效电路如图5所示。若电流方向为正,即电流流经D1或T2,则此时D2开路不会对四象限整流器的正常运行产生影响。若电流方向为负且T1导通,则电流会经过T1流入网侧,D2开路故障同样不会影响整流器的正常运行。当电流方向为负且T1不导通时,电流无法经整流器形成回路,电流iN接近于0 A,在网侧产生较高的脉冲电压。因此,D2开路故障会导致电流iN在负半周的电流幅值大幅降低。

图5 D2故障时的整流器等效电路Fig.5 Equivalent circuit of single-phase four quadrant rectifier when D2 fails
类似地,可以推导出D3开路故障与D2开路故障具有相似的特征,D4开路故障与D1开路故障具有相似的特征。
2 基于电流半波差异的开路故障诊断方法
通过理论分析可知,网侧输入电流在开路故障情况下存在半个周期的时间,这段时间内电流幅值会发生不同程度的降低。根据网侧输入电流的畸变区间以及电流幅值的降低程度即可对四象限整流器IGBT开路故障以及反并联二极管开路故障进行诊断。因此,本文提出一种基于网侧输入电流半波差异的单相四象限整流器开路故障诊断方法,该方法通过对比网侧输入电流畸变区间来区分1 号位(或4 号位)与2 号位(或3 号位)的开路故障,通过网侧输入电流幅值降低程度来辨别IGBT开路故障与反并联二极管开路故障,能够实时、快速、有效地对表1中的四类故障进行诊断。

表1 不同开路故障情况下的输入电流特征Table 1 Current features under different open-circuit faults
令网侧输入电流每个周期的采样点个数为n(n大于零且为偶数),则网侧输入电流正半周与负半周的采样点个数均为n/2。考虑到网侧输入电流的幅值受负载影响,在进行开路故障诊断之前,首先对网侧输入电流进行标准化处理:

其中:iN_S为标准化处理后的网侧输入电流;iN_RMS为网侧输入电流的均方根有效值。iN_RMS的具体计算公式可以写为
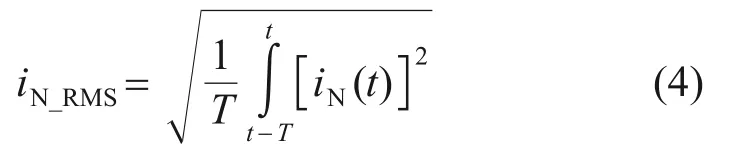
其中:t为时间;T为网侧输入电流基波周期。式(4)在离散形式下的表达式为

其中:iN(k)为第k个采样点的网侧输入电流。
当网侧输入电流完成标准化处理后,其电流幅值受负载等因素的影响将大幅降低。即使负载在诊断过程中发生变化,iN_S基本上不会出现明显的异常,从而便于后续诊断的开展。
通常,标准化后的网侧输入电流的正半周与负半周在同一个周期内是关于电流过零点对称的。因此,对于每一个采样点,可以得到:

其中:ek为取值较小(基本趋近于0)的误差,在后续诊断中可以忽略不计,k=1,2,…,n/2。
当某一开路故障发生时,网侧输入电流在负半周(或正半周)的电流幅值下降,而在正半周(或负半周)的电流幅值仍然保持正常。此时,式(6)可以写为

其中:Dk为由于网侧输入电流发生畸变而引起的差值。根据Dk的取值分布可以大致判定开路故障的类型。但网侧输入电流畸变仍然具有一定的随机性,导致在同一半波不同时刻的Dk存在较大差值。为了得到更好的故障特征,令

此时,通过DRMS可以更容易地了解某一开路故障情况下Dk的平均水平。当IGBT 发生开路故障时,电流幅值在畸变部分降低,DRMS会从零上升并超过一个较小的量纲一参数Dth_low;而当反并联二极管发生开路故障时,电流幅值在畸变部分大幅降低,DRMS会从零上升并超过一个较大的量纲一参数Dth_high。由此可以很快区分IGBT 开路故障与反并联二极管开路故障。
由于DRMS恒为非负,仅凭式(8)只能辨识出IGBT 开路故障与反并联二极管开路故障,需要通过Dk的正负才能进一步确定其中的故障类型。考虑到噪声以及干扰的影响,本文采用Dk的平均值即DAVE来代替Dk进行判断。令

当Dk的平均值大于等于零时,DAVE取值为1,表明网侧输入电流负半周发生畸变,电流幅值减小;当Dk的平均值小于零时,DAVE取值为-1,表明网侧输入电流正半周发生畸变,电流幅值减小。
结合式(8)和式(9)可以对表1 中所示四种开路故障进行准确辨识。令诊断信号输出值S为

则诊断信号输出值S与四象限整流器开路故障的对应关系如表2 所示。阈值参数Dth_low和Dth_high根据四象限整流器实际工作情况进行调节。

表2 单相四象限整流器开路故障诊断Table 2 Open-circuit faults diagnosis of single-phase four quadrant rectifier
图6所示为单相四象限整流器开路故障的整个诊断流程。从故障发生到故障诊断,整个过程最长只需一个基波周期。

图6 故障诊断流程Fig.6 Fault diagnosis process
需要说明的是,对于类似于T1和T4的开路故障诊断,由于故障后的网侧电压与电流以及直流侧电压的故障特征基本不存在明显差异,只能通过控制信号或加装额外传感器的方式才能实现两个开关管的故障辨识。然而,对系统进行改动在实际中会产生一系列难以有效处理的责任划分问题。因此,本文作者认为通过控制信号或加装额外传感器来进行诊断的方式并不是一种行之有效的解决方法,故不再对其进行探讨。
3 实验验证
本文通过dSPACE 平台(如图7 所示)模拟整流器IGBT开路故障与反并联二极管开路故障来对诊断方法进行验证。主要实验参数如表3所示。在实验中,通过关闭控制信号来模拟IGBT 开路故障,在反并联二极管一侧串联可控开关并控制开关关断来模拟反并联二极管的开路故障。通过模拟不同情况下的开路故障来对以下假设进行验证:

表3 主要实验参数Table 3 Key experimental parameters

图7 dSPACE实验平台示意图Fig.7 Diagram of dSPACE platform
1) 开路故障诊断方法能够有效诊断T1(或T4)开路故障、T2(或T3)开路故障、D1(或D4)开路故障以及D2(或D3)开路故障;
2) 开路故障诊断方法对于负载波动具有较好的鲁棒性,诊断结果不受负载变化的影响;
3) 开路故障诊断方法对于网侧电压波动具有较好的鲁棒性,诊断结果不受网侧电压变化的影响;
4) 开路故障诊断方法对于载波变化具有较好的鲁棒性,诊断结果不受载波变化的影响。
3.1 故障诊断方法有效性验证
当T1发生开路故障时,整流器的诊断过程如图8所示。由图8可见,T1开路故障发生在tA时刻。在开路故障发生前,诊断信号输出值S基本呈不规则的方波变化,其幅值约为0.2左右。出现这种现象的原因是由于正常情况下网侧输入电流的半波差异较小,使得DAVE的取值也在1和-1之间变化,从而导致诊断信号输出值S呈不规则的方波变化。当T1开路故障发生后,网侧输入电流在负半周的幅值相比正常情况时有所减小,在正半周的幅值基本不变;直流侧输出电压呈下降趋势。此时,可以明显观察到,S逐步上升,且经过大约一个基波周期后,S最终趋于一个稳定值(约为0.8)。根据表2可知,T1(或T4)发生开路故障。

图8 T1开路故障诊断Fig.8 Open-circuit fault diagnosis of T1
当T2发生开路故障时,整流器的诊断过程如图9所示。相似地,在T2发生开路故障之前,S呈不规则的方波变化;在T2发生开路故障之后,直流侧电压降低,S发生变化并于一个基波周期后趋于一个稳定的值。与T1开路故障不同的是,网侧输入电流在正半周发生畸变,电流幅值减小,而在负半周保持正常;S趋于稳定后的值正好与T1开路故障情况下的值相反(约为-0.8)。由表2 可知,T2(或T3)发生开路故障。

图9 T2开路故障诊断Fig.9 Open-circuit fault diagnosis of T2
图10和图11所示分别为D1开路故障以及D2开路故障时整流器的诊断过程。可以看出,在tA时刻以后,网侧输入电流由于反并联二极管开路故障在正半周(或负半周)发生明显畸变。相比于IGBT开路故障,反并联二极管开路故障使得网侧输入电流在正半周(或负半周)缺失更加严重,直流侧电压下降幅度更高。相应地,网侧输入电流的半波差异更加明显,DRMS也相对更高。
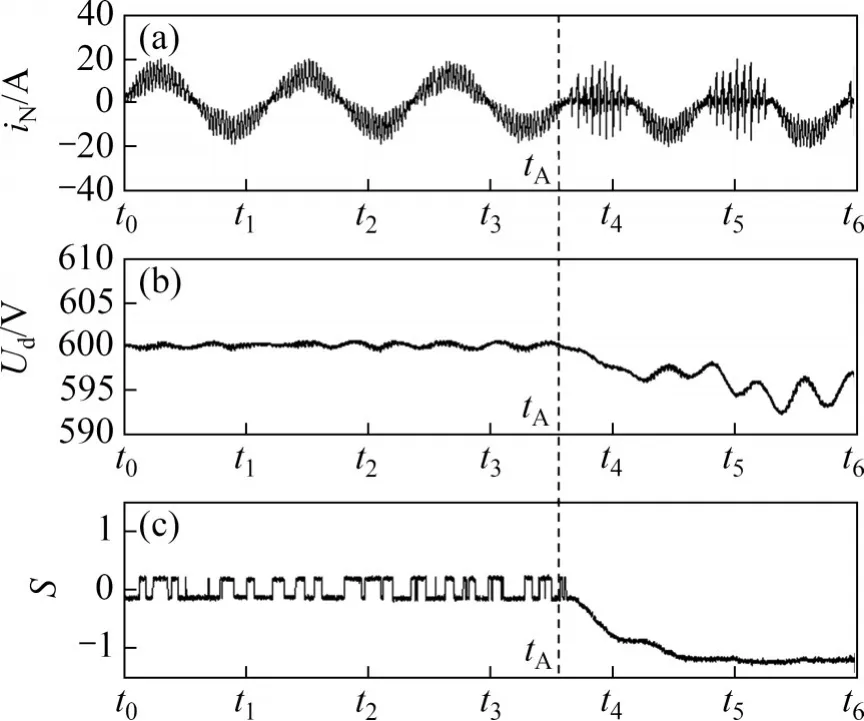
图10 D1开路故障诊断Fig.10 Open-circuit fault diagnosis of D1

图11 D2开路故障诊断Fig.11 Open-circuit fault diagnosis of D2
3.2 故障诊断方法在负载波动时的鲁棒性验证
当直流侧负载发生变化且T1发生开路故障时,整流器的诊断过程如图12 所示。在tA时刻,负载变化引起了直流侧电压小幅上升,对网侧输入电流影响甚微。从S来看,其值在正常工况下稳定在±0.2以内,即正常工况下负载变化不会引起任何误诊断。在负载变化后的暂态过程中,即直流侧电压还没有达到稳定之前,设置T1开路故障。可以看出,由于故障,在tB时刻以后,网侧输入电流负半周发生畸变,而正半周保持正常;直流侧电压开始下降。S逐渐上升并在tB时刻以后稳定在0.8左右,可以诊断为T1(或T4)开路故障。

图12 负载波动时的T1开路故障诊断Fig.12 Open-circuit fault diagnosis of T1 when load changes
当直流侧负载发生变化且D1发生开路故障时,整流器的诊断过程如图13 所示。类似地,正常情况下的负载变化并不会引起误诊断。当反并联二极管开路故障发生在负载变化后不久时,本文提出的诊断方法仍然能够准确做出响应。

图13 负载波动时的D1开路故障诊断Fig.13 Open-circuit fault diagnosis of D1 when load changes
3.3 故障诊断方法在网侧电压波动时的鲁棒性验证
图14 所示为整流器网侧电压波动时T1开路故障的诊断过程。在实验中,通过调节电压幅值,使网侧电压逐步减小。在网侧电压减小的过程中,网侧输入电流的幅值也随之缓慢减小。尽管如此,诊断信号并没有出现误诊断的现象,S仍然稳定在±0.2以内。在tA时刻,T1发生开路故障。网侧输入电流负半周发生畸变,而正半周保持正常。之后,S逐步上升并最终稳定在0.8 左右,诊断结果为T1(或T4)开路故障。图15 所示为整流器网侧电压波动时D1开路故障的诊断过程。同样地,故障发生前,网侧电压波动没有引起误诊断。当D1在tA时刻发生开路故障后,网侧输入电流正半周发生畸变,在负半周保持正常,S发生变化并稳定在-1.1左右,诊断结果为D1(或D4)开路故障。

图14 网侧电压波动时的T1开路故障诊断Fig.14 Open-circuit fault diagnosis of T1 when input voltage changes

图15 网侧电压波动时的D1开路故障诊断Fig.15 Open-circuit fault diagnosis of D1 when input voltage changes
3.4 故障诊断方法在载波频率变化时的鲁棒性验证
当整流器载波频率降低时,网侧输入电流存在较大纹波,谐波含量相对更高。图16 所示为整流器载波频率为500 Hz时T1开路故障的诊断过程。可以看出,网侧输入电流的波形质量明显下降。尤其在开路故障后的负半周,网侧输入电流畸变更加严重。即使如此,S在故障前一直保持在±0.2以内;直到开路故障发生后,S才上升并稳定在0.8 左右,诊断结果指示为T1(或T4)开路故障。图17 所示为整流器载波频率为2 kHz 时D1开路故障的诊断过程。载波频率上升没有对D1开路故障诊断产生影响,S最终稳定在-1.2左右,诊断结果指示为D1(或D4)开路故障。

图16 载波频率为500 Hz时的T1开路故障诊断Fig.16 Open-circuit fault diagnosis of T1 when carrier frequency is 500 Hz

图17 载波频率为2 kHz时的D1开路故障诊断Fig.17 Open-circuit fault diagnosis of D1 when carrier frequency is 2 kHz
4 结论
1) 针对单相四象限整流器开路故障,提出了一种基于输入电流半波差异的开路故障诊断方法;与现有方法相比,该方法仅采用一个电流传感器作为诊断变量输入,通过分析输出电流相邻两个半波的形变差异来实现上下桥臂的开路故障定位,利用网侧输入电流幅值降低程度实现IGBT开路故障与反并联二极管开路故障的诊断。
2) 该方法能够有效诊断单相四象限整流器开路故障,具有较好的鲁棒性,诊断结果不受负载、网侧电压以及载波变化的影响。
