一种高效的二维恒虚警率处理方法
2022-11-25王晓燕
王晓燕
(中国电子科技集团公司第二十研究所,陕西 西安 710068)
0 引 言
目标检测是雷达的重要研究领域之一,在较强的地杂波或海杂波背景下快速准确地检测到目标也是目前研究的重要方向。恒虚警率(CFAR)检测作为目标检测的重要手段,其快速且不丢失检测性能一直是研究的重点。一些典型的恒虚警率处理方法如均值类恒虚警率处理(CA-CFAR)、有序统计类恒虚警率处理(OS-CFAR)等[1],这些恒虚警率处理方法都是一维恒虚警率。但雷达背景噪声和杂波在距离和多普勒维同时存在[1-2],这就使得一维恒虚警率的检测性能大大降低,因此对二维恒虚警率检测的研究和应用就显得尤为重要。
二维恒虚警率检测性能好,但计算量会大大增加,实时性较难满足。本文基于工程实践,提出了一种改进的二维恒虚警率处理方法。通过工程实际应用及验证,该方法既满足了检测性能的要求,又保证了实时性。
1 经典二维恒虚警率算法
图1中si表示当前待检测的单元,浅灰色区域表示保护单元,深灰色区域表示参加噪声功率电平ni计算的参考单元。然后将待检测单元与噪声功率电平比较si/ni,如果si/ni>mi(检测门限),则认为当前待检测单元存在目标,然后在距离维和多普勒维滑窗对所有单元进行检测。
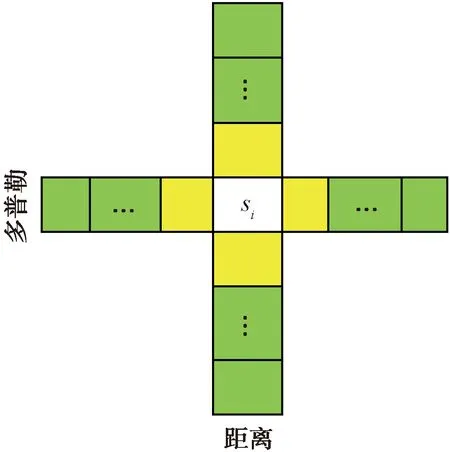
图1 二维CFAR检测示意图
参考窗的选择和噪声功率的计算方法需要根据应用环境和要求的不同进行适当的选择。典型的二维恒虚警率检测器有二维CA-CFAR、二维OS-CFAR或一维CA-CFAR+一维OS-CFAR等[3]。当在同一距离单元的不同多普勒单元或同一多普勒单元的不同距离单元上存在目标时,OS-CFAR因其可剔除参考单元内的较大值,可大大降低漏检概率,但其计算量相对CA-CFAR会加大。以距离恒虚警率检测为例,给出一维CA-CFAR和OS-CFAR的处理框图,如图2、图3所示。

图2 一维CA-CFAR处理图

图3 一维OS-CFAR处理框图
2 改进的二维恒虚警率算法
二维恒虚警率检测需要二维滑窗,按照经典二维恒虚警率算法对每个检测单元进行滑窗处理,会花费大量的计算时间。如果在进行滑窗处理前,先对检测单元进行筛选,再对可能存在目标的检测单元进行二维恒虚警率恒虚警率处理,经过工程验证,这样会大大缩短处理时间。处理框图如图4所示。
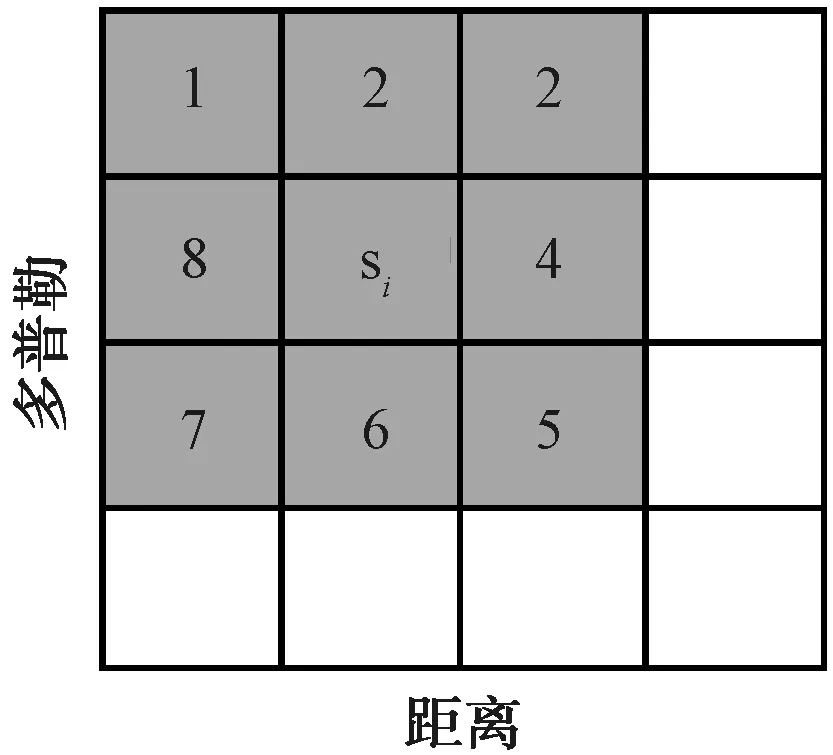
图4 改进的二维恒虚警率处理框图
si为待检测单元,先判断si是否是其所在九宫格(阴影部分)中的极大值。如果是极大值,则对si进行图1的恒虚警率检测,并对其做上标记。再次滑窗时,和si相邻的未检测单元4、5、6、7将不再可能是其所在九宫格的极大值。因此,这些单元不可能存在目标,故不再进行恒虚警率检测。这样,可大大减少检测单元数量,从而降低了目标检测的时间成本。以图4中si为例给出当前检测单元改进二维恒虚警率处理流程图如图5所示。应用该方法,结合解算距离和速度模糊算法,在某型雷达搜索模式下对无人机进行搜索,可准确搜索到目标,且保证在每个帧周期内完成目标检测,很好地保证了目标检测的实时性。图6和图7给出了应用该改进二维恒虚警率算法对无人机进行检测的距离和速度结果。
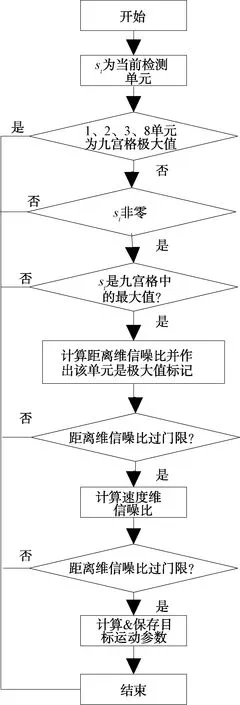
图5 改进的二维恒虚警率处理流程图

图6 改进的二维恒虚警率检测无人机距离图

图7 改进的二维恒虚警率检测无人机速度图
3 结束语
恒虚警率检测作为雷达探测目标的重要手段之一,由于目标回波一般会在距离和多普勒维都存在杂波和噪声,因此二维恒虚警率检测的研究与实现就显得尤为重要。本文提出改进的二维恒虚警率检测方法,通过工程应用,可极大减少检测单元,从而缩短了目标检测时间,提高了工程实现效率。
