基于多种目标运动模式的光电跟踪性能测试系统研究
2022-11-12张春仙
张春仙,万 英,张 续
(中国电子科技集团公司第十一研究所,北京 100015)
1 引 言
随着军事技术的不断发展,现代战争已由过去的近距离作战模式发展为以远距离精确打击为主的战争模式。作为地对空、空对地、空对空等多个武器装备体系中打击机动目标必不可少的装备,光电跟踪系统在导弹制导、火炮瞄准、空间目标跟踪、靶场测量等领域得到了广泛的应用[1-3]。光电跟踪系统的主要作用是获取多波段图像后进行目标检测和定位,引导伺服机构对目标进行稳定跟踪和瞄准,并将目标空间位置和运动轨迹发送给火控系统以便对目标实施打击,其中对目标进行稳定跟踪是精准打击机动目标的关键,因此在光电跟踪系统的验收和鉴定时必须考虑对光电跟踪系统的跟踪性能进行测试,由于采用真实目标进行实际外场测试需要大量的人力、物力和时间,且目标飞行条件不好控制,测试重复性较差,因此有必要在实验室搭建光电跟踪性能测试系统。
光电跟踪性能测试系统主要分两类,一类是等效正弦输入法[4],该方法通过生成模拟正弦信号,激励跟踪伺服系统进行跟踪,其理论依据是虽然目标的运动特性是具有多样性的,但都可以近似转换为不同幅度和频率的正弦信号的累加,该方法通过计算机通信引导光电跟踪伺服系统完成跟踪,不经过电视、红外等跟踪传感器,因此不包括跟踪传感器的性能,不能全面反映光电跟踪系统的性能;另一类是光电动态靶标检测[5],光学系统采用平行光管产生运动光电目标,平行光管分为反射式和透射式系统,根据跟踪系统最大角速度和最大角加速度要求,设置光电目标运动参数,启动跟踪系统对目标进行跟踪,计算跟踪过程的脱靶量,在脱靶量满足战术指标要求的条件下,获得跟踪系统的最大角速度和最大角加速度。在该方法中,光电跟踪系统需要对光电靶标成像,获取目标成像信息,因此,比起前一类方法,可更全面评价光电跟踪系统的性能。
文献[6]提出一种动态靶标结构,其主要特点是无穷远光学目标按照检测指标要求做标准正弦或等速往复直线运动,光电跟踪设备通过跟踪该目标来完成伺服性能指标的检测。
文献[7]、[8]设计一种反射式平行光管结构,平行光管固定不动,系统控制位于平行光管焦面处的靶标进行旋转运动,模拟目标运动轨迹。
以上两种方法存在的问题是反射式系统视场较小,且靶标运动模式单一。
针对以上问题,本文提出一种跟踪性能测试方案,该测试方案采用长焦透射式光学系统,相比反射式系统视场更大,靶标运动采用正余弦、圆周等多种运动模式,还可根据具体战术目标的特点自定义运动曲线,满足更多的测试需求。
2 光电跟踪系统跟踪性能测试系统组成
图1为测试系统组成框图,测试系统由投影红外光学成像系统(中、长波红外光学投影镜头)、目标模拟器(二维运动机构、靶标)、常温、高温黑体组件及控制系统组成,采用红外光学系统耦合技术、像方扫描技术和高精度运动控制技术,模拟光电探测设备视场范围内目标运动、能量变化特性(根据目标温度与辐射能量的对应关系,通过设置不同温度而获得不同的辐射能量),实现对光电跟踪性能的测试。
控制系统主要由工控机、运动控制系统组成。工控机运行上位机控制软件,通过RS232接口接收主控系统发送的外部控制指令,生成黑体温控指令和目标运动指令,运动控制系统接收工控机指令,控制目标在视场范围内的快速运动,如图2所示。
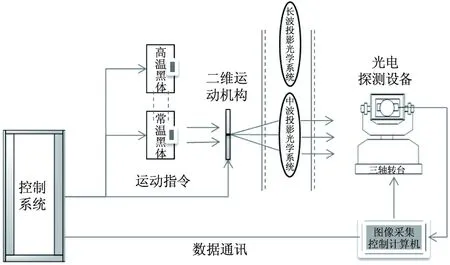
图1 测试系统组成框图Fig.1 Block diagram of test system
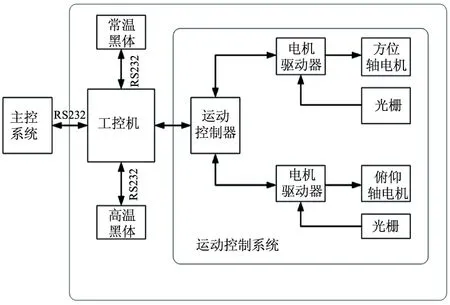
图2 控制系统组成框图Fig.2 Block diagram of control system
目标模拟器包括二维运动平台和靶标组件,靶标组件模拟无穷远处不同张角的目标,由单点靶标和多点靶标组成。靶标固定在运动平台上,接收运动控制指令,实现航向、俯仰方向的运动,模拟目标运动轨迹,运动轨迹包括圆周运动、正弦运动、余弦运动,也可根据战术目标的运动参数自定义运动曲线。设备如图3所示。

图3 测试系统配置Fig.3 Configuration of test system
技术参数如下:
准直光学系统波段:3~5 μm、8~12 μm;
焦距:500 mm;
视场:6.71°×5.38°;
光学出瞳口径:250 mm;
靶标尺寸:0.03~3 mm;
靶标运动精度:±5 μm;
跟踪角度精度:±2″。
3 测试流程
开始测试时,设置黑体温度和靶标运动曲线,待黑体温度稳定后,靶标开始运动,跟踪系统传感器对靶标成像并启动跟踪,测控计算机通过图像采集卡采集跟踪系统输出的视频图像,计算跟踪脱靶量,评估满足脱靶量要求的跟踪最大角速度和最大角加速度位于准直光学系统焦平面处的运动靶标模拟无穷远运动目标,其角速度和角加速度的计算方法如下:
以X方向正弦运动为例,靶标的运动方程为:
x=Asin(2πft)
式中,x为靶标水平方向偏离视场中心的角度值,单位(°);A为振幅,单位(°);f为频率,单位(Hz)。
靶标X方向的角速度为:
靶标X方向的角加速度为:
由此可见,运动过程中最大角速度为2πfA,最大角加速度为(2πf)2A。
测试时,根据跟踪系统战技指标要求,计算得到跟踪最大角速度和最大角加速度,并依据计算结果设置靶标运动的频率f和振幅A,观察靶标跟踪情况,并采集跟踪视频,计算跟踪过程中方位和俯仰方向的跟踪精度,在跟踪精度满足系统要求时,得到跟踪系统的最大角速度和最大角加速度,跟踪精度计算公式如下:
式中,θ为方位(或俯仰)跟踪精度;α1为第一帧方位(或俯仰)偏差;αn为第n帧方位(或俯仰)偏差。
4 测试过程实例
4.1 根据战技指标要求计算跟踪过程中目标最大角速度和角加速度
以某跟踪系统为例,跟踪目标为相距d的平飞目标,目标运动速度为v,如图4所示。

图4 目标角速度计算Fig.4 Target angular velocity calculation
在目标从跟踪系统左前方30°到右前方30°的飞行过程中,目标相对于跟踪系统的角度为α,目标相对于跟踪系统的角速度为w,目标相对于跟踪系统的角加速度为a,则:

=-vd/[d2+(L-vt)2]

通过求导求极值可知:
当α= 0°时,|w|取最大值,且:
|wmax|=v/d
当α= 30°时,|a|取最大值,且:
以距离d为4 km,速度v为400 m/s为例,其最大角速度和最大角加速度分别为:
|wmax|=0.1/s
4.2 设置靶标运动参数
(1)选择正弦运动时,计算对应最大角速度和最大角加速度的正弦运动振幅和频率,并依据计算结果设置目标运动振幅和频率。
2πfA=0.1
(2πf)2A=0.006495
根据该式计算后,得到的A过大,超出视场范围,因此,可先将A设置为最大视场半角,该系统中,A为3°,由以上两式得到分别对应于最大角速度和最大角加速度的f1和f2,取其中较大值作为目标进行正弦运动的频率f。
f1=0.303 Hz
f2=0.056 Hz
则目标正弦运动的频率f选择0.303 Hz,振幅选择3°。
可依据方位和俯仰方向的不同跟踪性能要求分别进行方位和俯仰方向的正弦运动测试,与圆周运动(相当于同时进行方位和俯仰方向的正弦运动)相比,便于分析和定位问题。
由于正弦运动初始速度最大,短时间内速度从0增加到最大速度,初始加速度有可能超过设计要求,在这种情况下,有可能跟踪系统不能实现稳定跟踪,此时可采用余弦运动。
(2)选择圆周运动时,计算对应最大角速度和最大角加速度的圆周运动的半径和频率,并依据计算结果设置目标运动半径和频率。
靶标相对跟踪系统光轴的角度为R,则靶标角速度w和角加速度a分别为:
w=2πfR
a=(2πf)2R
式中,f为旋转频率。
R取最大视场半角3°,此时由以上两式同样可得到分别对应于最大角速度和最大角加速度的f1和f2,取其中较大值作为目标进行正弦运动的频率f。
f1=0.303 Hz
f2=0.056 Hz
则目标圆周运动的频率f选择0.303 Hz,半径选择3°。
(3)靶标运动模式还可根据用户需要定义,或者通过外场所采集的实际运动目标的视频图像自动生成靶标运动曲线。
生成靶标运动曲线的流程如图5所示。

图5 目标运动曲线生成流程
4.3 启动跟踪,稳定跟踪后计算跟踪脱靶量
跟踪系统传感器对准准直系统,高精度电机控制靶标依据所设置的运动参数运动,跟踪系统对其启动跟踪,测控计算机采集跟踪图像,若能在一段时间内(本次试验为7 min)保持对目标的跟踪,如图6所示,则计算跟踪过程中的脱靶量,若脱靶量满足要求,则说明跟踪性能满足所设置的最大角速度和最大角加速度要求。若在一段时间后目标跟踪丢失,如图7所示,则说明跟踪性能不满足所设置的最大角速度和最大角加速度要求,需调试系统后重新测试。

图6 目标跟踪状态Fig.6 Target tracking status

图7 目标跟踪丢失状态Fig.7 Target tracking loss status
脱靶量计算过程如下所示:
(1)读取跟踪图像,选取目标所在区域,如图8、9所示;
(2)对所在区域图像进行二值化处理后(如图10所示),得到目标质心坐标,计算质心坐标与图像中心坐标的方位和俯仰差值,并以图像帧数为横坐标,距离为纵坐标,绘制出脱靶量曲线图,如图11所示。
(3)分别计算出方位和俯仰方向的跟踪精度,若跟踪精度满足系统要求,则测试完成;若跟踪精度不满足要求,则需要调试后重新测试。
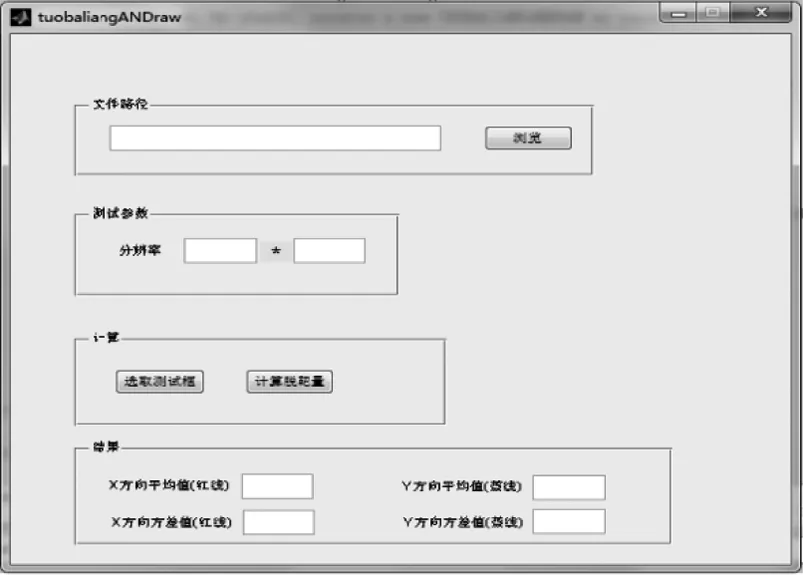
图8 读取跟踪图像Fig.8 Tracking image reading
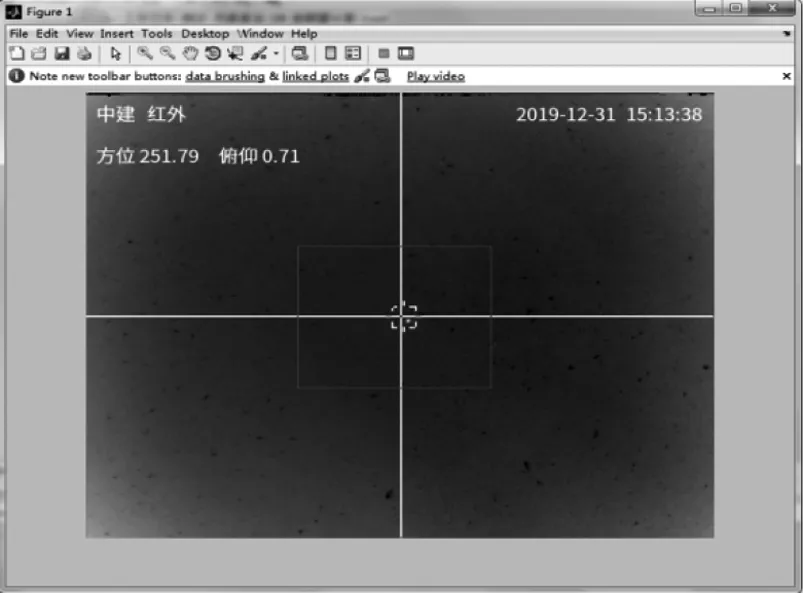
图9 选取目标区域Fig.9 Target area selection
图10 二值化处理目标图像Fig.10 Target image binarization
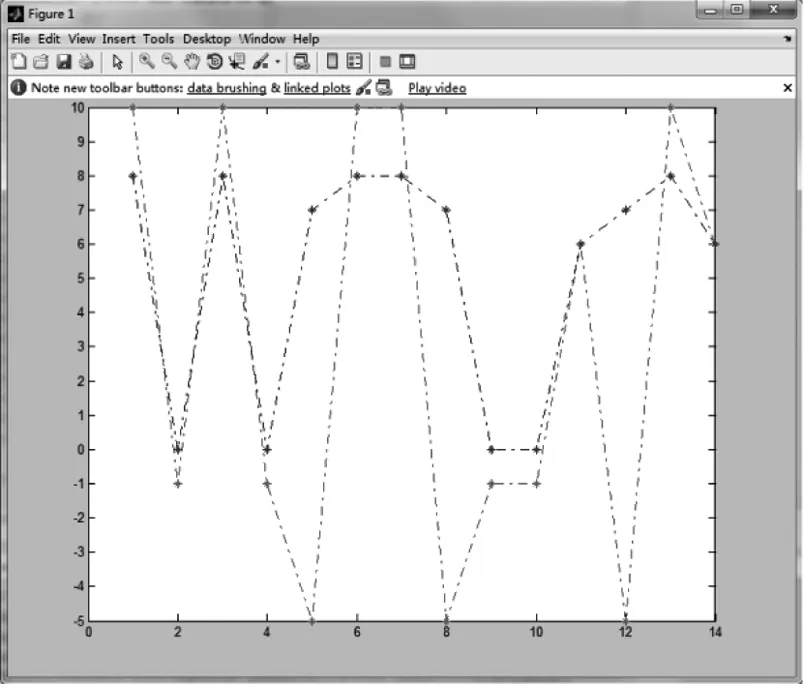
图11 脱靶量曲线图Fig.11 Miss distance curve
根据图12的方位和俯仰偏差,可得到方位跟踪精度为6.6 pix,俯仰跟踪精度为6.0 pix,根据传感器每像素瞬时视场,可得到方位和俯仰跟踪精度所对应的角度值。
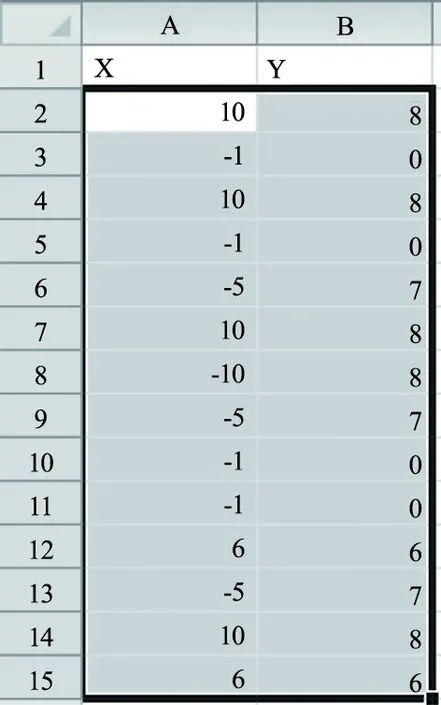
图12 脱靶量数据表Fig.12 Miss distance data sheet
5 结 论
跟踪最大角速度和最大角加速度是评价光电跟踪系统跟踪性能的主要参数,本文所提出的光电跟踪测试系统采用透射式中长波准直光学系统,与反射式系统相比,视场更大,靶标不仅可进行圆周运动和正余弦运动,还可依据外场采集视频中的实际目标运动轨迹进行运动,因此可模拟具有复杂运动特性的目标,靶标运动精度高,总的来说,该系统具有大视场、高精度、运动模式多样、结构简单的特点,可实现实验室内对光电跟踪最大角速度和最大角加速度的高精度测试。
