基于任务的军用飞机闭环动态特性要求综述
2022-11-05王立新田娇王晋刘海良乐挺
王立新,田娇,王晋,刘海良,乐挺
北京航空航天大学 航空科学与工程学院,北京 100191
随着飞行控制技术的发展,可以针对军用飞机所执行任务的特点来剪裁飞行控制律,改善其操纵响应特性[1]。因此,有必要针对不同的作战任务研究相应的飞行品质要求,作为其飞行控制律优化设计的目标,保证飞机在执行不同作战任务时均具有优良的飞行品质,从而提高其作战效能[2]。
目前使用的军用飞机飞行品质规范(如中国的GJB185-86、美国的MIL-STD-1797A等)尚有诸多的不足之处,不能完全满足先进军机设计与试飞定型等工作的要求[3-5]。首先,现有的飞行品质条款多为验证在脉冲或阶跃操纵时飞机的稳定特性或操纵特性,与真实的作战使用任务关联性较小,不易暴露飞机设计中可能存在的一些缺陷。例如,满足常规飞行品质规范要求的美国C17-A飞机,在执行空中加油任务时就暴露出了驾驶员诱发振荡问题,导致需对其飞行控制律进行重新设计[6]。其次,现有的评定标准与方法一次只能评定飞机一个轴向的飞行品质,缺少能够同时评定飞机多轴飞行品质的综合判据[4]。最后,现有飞行品质规范的条款要求一般均基于小迎角飞行试验数据制定的,缺乏针对飞机进行大幅机动和完成特殊作战任务的飞行品质评定条款。特别是对于第4代以后的高机动战斗机,缺乏针对大迎角与过失速等空战机动任务的评定条款[7]。
针对上述问题,可以采用基于任务的飞行品质评定方法来解决,即以实际作战任务和战术要求为依据来设计评定飞机飞行品质的机动动作,通过地面模拟试验或空中飞行试验,评定飞机完成飞行任务时的飞行品质等级[8]。采用这一方法时,应研究并分解实际的作战任务,设计适用于评估飞行品质的机动任务[4,9];此外,采用该方法评定时可完整地保留飞机高阶系统所具有的非线性特性与所有的动态特性[10-11],能够充分展示飞机在执行作战任务时的运动特性。因此,基于任务的飞行品质评定方法能够弥补现有飞行品质规范的不足,适用于现代军用飞机飞行品质评定和闭环响应特性要求的研究。
基于任务的飞行品质评定方法最早是由美国学者提出的。1993年美国空军怀特实验室发表了一组关于飞机飞行品质与敏捷性评估机动的研究报告,提出了基于任务的飞行品质评定思想,列出了飞行品质评定的部分机动任务的名称[8,12-14],但未给出详细的评估任务设计要求、任务机动过程与评估性能标准等。在2004年重新修订的MIL-STD-1797A[4]中,增加了一些评定闭环飞行品质的机动,也即基于任务的飞行品质评定方法已应用于工程实践。此外,国内外学者对基于任务的飞行品质评定方法也进行了深入地研究,扩充了用于飞行品质评定的机动任务[5,15-16],提出了选用基本战术机动动作及其组合构成的机动动作链进行飞行品质的评定[17],开展了针对大迎角机动[9,18]、近距空战[19]、空中加/受油[20-23]和舵面破损[24]等任务/场景的飞行品质评定研究,并提出了基于任务的缩比模型飞机[25]、无人机[26-27]和直升机[28]飞行品质的评定思路。
本综述论文较系统地介绍了基于任务的飞行品质评定方法,阐述了评估机动任务的主要性能指标,并以4种典型作战任务/场景为例,给出了基于任务的军用飞机闭环响应特性要求建议,讨论了其与常规飞行品质评定准则的差异及其应用于飞机设计与评定的有效性等。
1 基于任务的飞行品质评定方法
基于任务的飞行品质评定方法以实际的作战任务为依据来设计评定所用的机动任务,通过地面模拟试验/空中飞行试验的结果以及飞行员的主观评价,来综合评定飞机的飞行品质等级。基于任务的飞行品质评定流程如下:
1) 针对不同的作战任务或场景,需根据特定飞行任务对飞机动态特性的要求,综合考虑地面模拟/空中飞行试验的可行性来设计评估机动任务。评估机动任务必须与实际作战任务密切相关,能够暴露出飞机在执行特定作战任务时运动特性的缺陷;同时应对飞机的某些关键参数具有适当的敏感度,以便指导飞行控制律的设计。此外,评估机动任务分为有无目标机2类:对于无目标机的评估机动任务,仅需设计试验机的机动动作;有目标机的机动任务,要求飞行员操纵试验机截获或跟踪目标飞机,需同时设计目标机和试验机2种不同的机动动作。
2) 根据评估机动任务的特点,需建立飞行品质评定试验平台,开展地面模拟试验或空中飞行试验。针对有目标机的空中飞行试验,可以采用2架飞机真实飞行的方式,也可对试验机的机载系统进行相应改装,将离线数学仿真获得的目标机运动数据实时显示到试验机的平显(Head-up Display,HUD)上,从而进行飞行品质评定试验。
3) 根据评估机动任务的要求,至少由3名飞行员完成飞行品质评定试验,并依据库珀-哈珀评分(Cooper-Harper Rating, CHR)表[29]和驾驶员诱发振荡(Pilot-Induced Oscillations, PIO)趋势评价标准[30],结合在飞行品质评定试验中的工作负担和操纵感受,给出飞行品质主观评定。
4) 工程师通过分析试验数据,结合飞行员的主观评定,得到飞行品质等级的评定结果。
需要说明的是,若是开展基于任务的飞机闭环飞行品质的要求研究,则需调整试验机的飞行控制律参数,设置具有不同操纵响应特性的试验机运动模型,然后进行飞行品质评定试验,最后通过分析飞机飞行品质等级与闭环响应参数之间的对应关系,提取能表征飞行品质要求的特征参数,并得到相应的量化边界建议,如图1所示。
2 评估机动任务的设计
2.1 任务主要性能指标
任务的完成效果通常由快速性、准确性和稳定性来表征。一般来讲,对于截获与跟踪类机动任务,要求试验机在不同空战态势下对目标机进行截获与跟踪,通常选用瞄准精度、截获或跟踪时间、超调次数等作为任务的性能指标;近距编队和空中加油类机动任务,要求飞机同时进行航迹和姿态的精确控制,通常选用位置和姿态的误差作为任务的性能指标。本文主要重点讨论飞机的截获、跟踪、空中加油等任务,主要性能指标定义如下:
1) 瞄准精度
瞄准精度由瞄准密位数、目标高低角和方位角表征。瞄准密位数μmil用于描述试验机飞行员使用瞄准环对目标机进行截获或跟踪时的瞄准误差,定义为瞄准视线与瞄准基线的夹角,常以密位(mil,1mil=0.06°)为单位。瞄准密位数的示意图如图2所示。图中,Opilot为座舱内飞行员眼点位置,OHUD为平显上瞄准准星位置,M为目标机上某点(通常为目标机质心),射线OpilotM为瞄准视线(飞行员眼点与目标机上某点的连线),射线OpilotOHUD为瞄准基线(是飞行员眼点与平显上瞄准星的连线,与飞行纵轴平行)。瞄准密位数μmil即为射线OpilotM与OpilotOHUD的夹角。
目标高低角θmil用于描述使用水平瞄准带对目标机进行截获或跟踪时的瞄准误差,定义为瞄准视线与瞄准基平面的夹角。瞄准基平面定义为包含瞄准基线且与飞机对称平面垂直的水平面。目标高低角的示意图如图3所示。图中,平面OpilotAB为瞄准基平面,是包含瞄准基线且与飞机对称平面垂直的平面,射线OpilotC为瞄准视线OpilotM在飞机对称平面内的投影。目标高低角θmil为射线OpilotM与平面OpilotAB的夹角,即射线OpilotC与OpilotOHUD的夹角。
目标方位角ψmil用于描述使用垂直瞄准带对目标机进行截获或跟踪时的瞄准误差,定义为瞄准视线与试验机对称平面的夹角。目标方位角的示意图如图4所示。图中,目标方位角ψmil为射线OpilotM与平面OpilotOHUDC的夹角,即射线OpilotM与OpilotC的夹角。
2) 截获时间
截获时间用于反映飞机完成截获类任务的快速性,它定义为截获结束时刻与截获开始时刻的时间之差。为截获目标,试验时飞行员突然拉杆或压杆的时刻定义为截获开始,目标机首次进入试验机瞄准环或瞄准带时定义为截获结束。
3) 超调次数
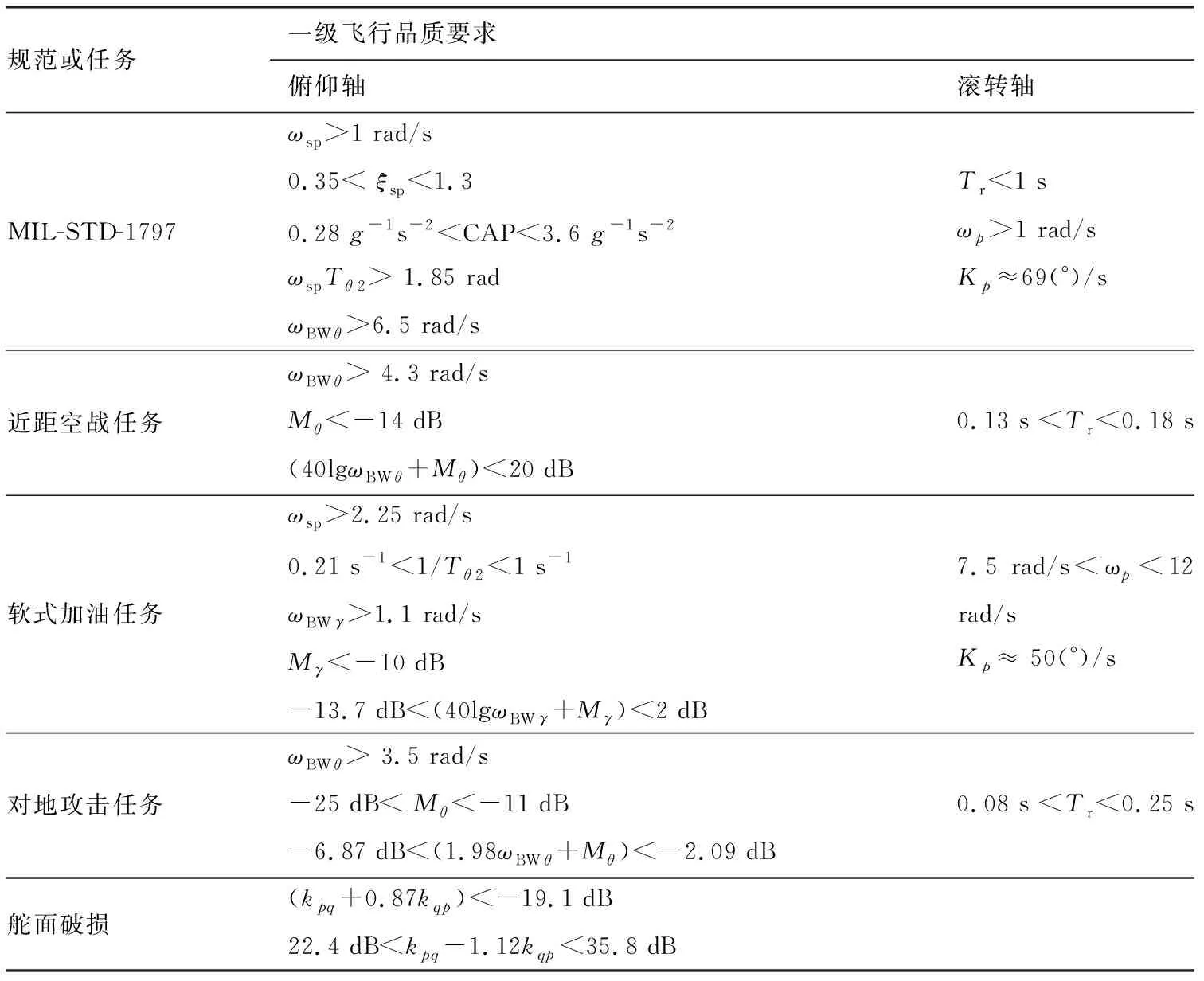
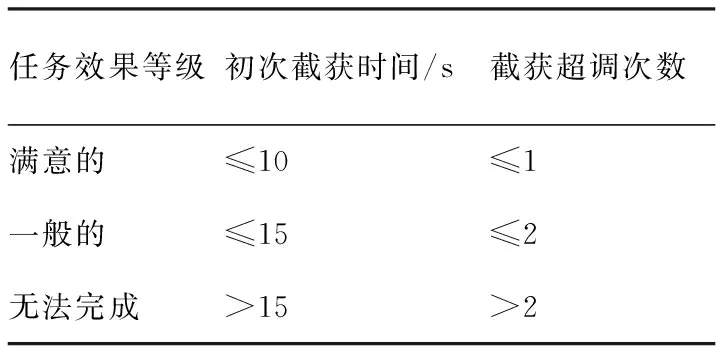
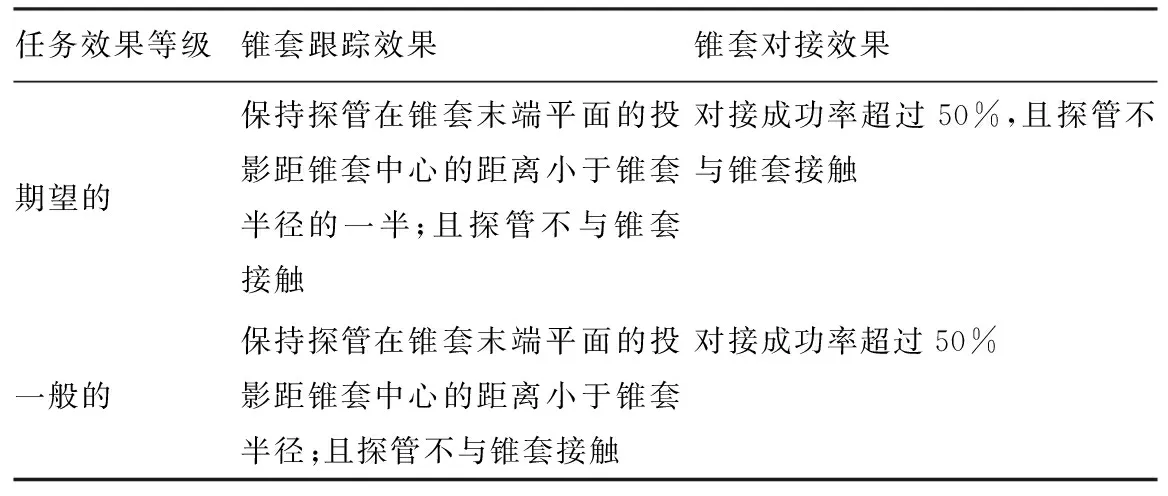
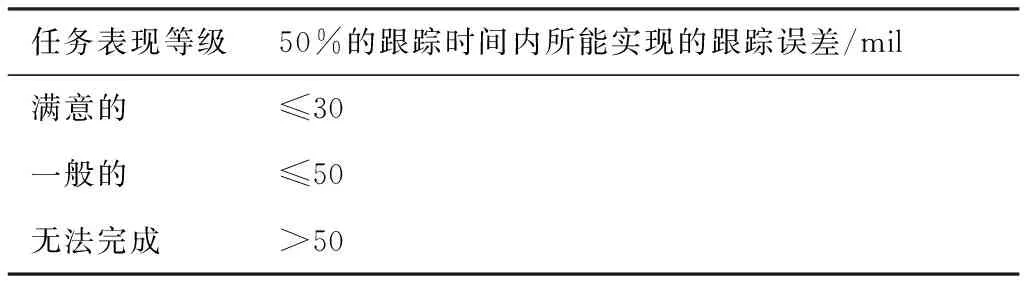
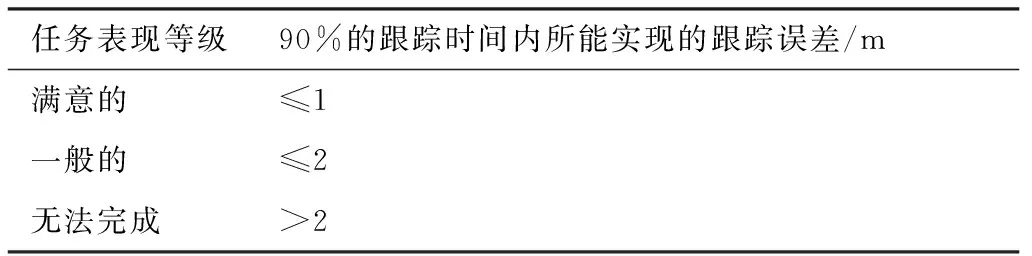
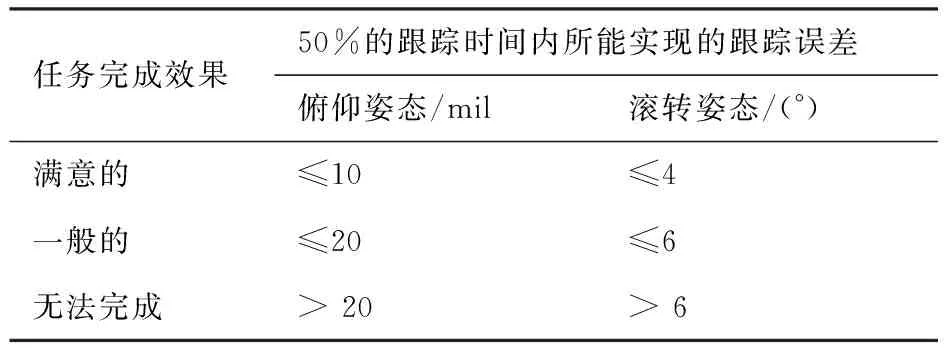
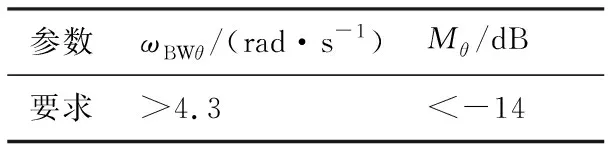
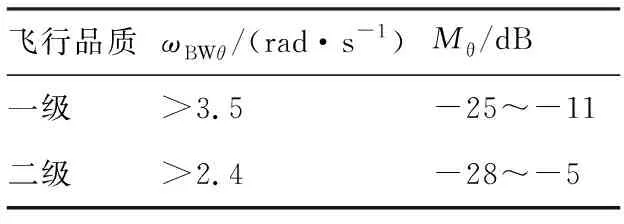
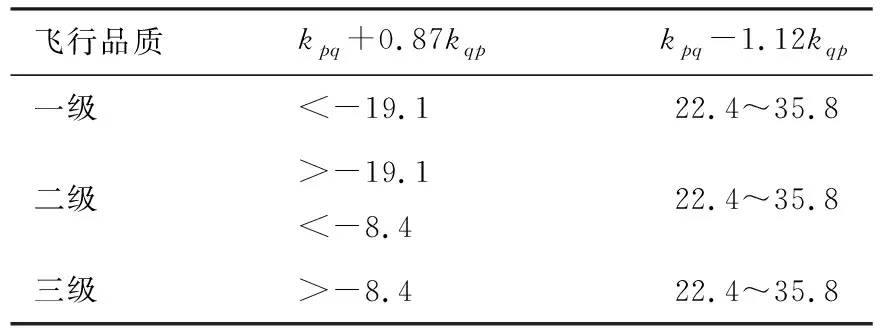
超调次数用于描述飞机完成截获跟踪类任务的稳定性。当时变量y(t)稳定收敛时,其上下边界分别记为yup和ylow,若y(t)的时间历程满足以下2个条件中的任何1个,则被判断为超调1次:①y(t)≤yup且y(t+Δt)>yup;②y(t)≥ylow且y(t+Δt) 超调次数的示意图如图5所示。图中,y(t)在分别在t1、t2时刻发生超调,在选定的tstart-tend时间段内共发生了2次超调。 此外,对于着陆与滑跑类机动任务,对飞机的场域飞行品质有要求,可根据任务选取飞机的位置、姿态和速度等参数作为性能指标。 基于美国军用飞机飞行品质规范MIL-STD-1797A附录[4]中列出的机动任务以及实际作战需求等,选取近距空战、空中加/受油、对地攻击、舵面破损4个典型任务或场景,分析它们的不同特点,介绍相应的飞行品质评估机动任务的设计与制定的性能标准。 2.2.1 近距空战 战斗机在近距空战中的主要任务是通过空间机动,对目标飞机进行粗略但快速地截获和精确且持续地跟踪。因此选取的机动任务应当由多轴截获与跟踪机动动作构成,且具有较大的机动幅度。交叉截获与跟踪任务[19]包括快速滚转进入机动平面、增大迎角截获目标、快速反向俯仰机动、横向跟踪和纵向跟踪目标等多个动作,能够用于综合测试飞机在近距空战中进行剧烈机动的能力,可作为评定飞机近距空战飞行品质的代表机动任务。 交叉截获与跟踪任务可用于综合评价近距空战中飞机在中到大迎角时进行剧烈机动的俯仰轴和滚转轴的飞行品质,并能够检验飞机的PIO趋势。任务开始时试验机与目标机交叉飞行,受视距限制,两机初始位置如图6所示。目标机在掠过试验机前上方后进入水平转弯,受飞机能力限制,水平转弯的过载可维持在5~6g;此时,试验机飞行员拉起飞机并滚转进入目标机机动平面,迅速用30 mil瞄准环捕获目标机,而后快速推杆卸载并进行反向滚转,紧跟目标,完成反向滚转后对目标进行持续地跟踪,达到足够长的跟踪时间后卸载退出机动。 交叉截获与跟踪任务的完成效果主要由截获的快速性和稳定性、跟踪的准确性和稳定性来表征。初次截获目标用时和截获超调次数可表征截获的快速性和稳定性;目标机位于瞄准环内的时间比例可表征跟踪的准确性和稳定性。综合考虑任务难度及其与飞行品质等级的对应关系,可确定评估任务完成效果优劣的标准,如表1所示,任务性能标准分为“满意的”“一般的”“无法完成”3个等级。 表1 交叉截获与跟踪任务完成效果评价[19]Table 1 Performance standard of crossing target acquisition and tracking task[19] 2.2.2 空中加/受油 空中加油任务分为软式和硬式2种。软式空中加油受外界大气扰动影响较大,由受油机主动完成受油探管与加油锥套的对接;硬式空中加油设备较复杂,主要由加油机操作员控制伸缩硬杆完成对接。在2种加油方式中,加油机的主要任务是保持定直平飞,尤其是在大气紊流、阵风及受油机气流扰动时保持其飞行速度、高度和航向,即要求加油机在一定强度的大气扰动下具备保持航迹和姿态稳定的能力。 在软式加油任务中,需要在复杂的流场环境中精确地控制受油机的姿态和航迹,以完成受油探管对加油锥套的跟踪与对接;硬式加油任务中,由于伸缩硬杆不动、飞行员距伸缩硬杆距离相对较远、没有与加油设备相撞的风险等原因,任务难度较小,主要要求受油机能够精确地控制其航迹。 1) 软式加油任务的受油机 探管-锥套式空中加油任务[23]可以综合评估受油机对水平和铅垂方向航迹和速度的精确控制能力、空中加油时对接近速度和高度的精确控制能力以及闭环跟踪的控制灵敏度和协调性,并能检验受油机的PIO趋势,可作为评定软式空中加油时受油机飞行品质的代表机动任务。 该任务分为锥套跟踪和对接2个部分,锥套跟踪阶段飞行员操纵受油机移动到锥套后方预对接位置,使用受油探头跟踪锥套末端平面中心。受油机机头弓形波会对受油探头与锥套的对接产生气动干扰,锥套跟踪距离过小,弓波影响较大,难以完成跟踪;距离过大,跟踪结束后难以进行快速对接。因此,受油探头与锥套的距离需维持在约2.5 m。跟踪时间与实际软式空中受油任务的完成时间相关,因此,跟踪时间常设置为20 s。完成锥套跟踪任务后进入锥套对接阶段,飞行员操纵受油机由预对接位置以要求的接近速度向锥套靠近,直至受油探头插入锥套中的接口,完成对接。探管-锥套对接过程如图7所示。 探管-锥套式空中加油任务由对锥套的跟踪和对接2个动作构成。跟踪与对接效果分别由跟踪精度与对接成功率来表征。该任务完成效果的评定标准如表2所示。 表2 探管-锥套式空中加油任务完成效果评价表[23]Table 2 Performance standard of probe-and-drogue aerial refueling task[23] 2) 硬式加油任务的受油机 伸缩硬杆跟踪任务[8]可作为评定硬式空中加油时受油机飞行品质的代表机动动作。在此任务中,飞行员操纵并保持受油机与加油机硬杆的相对位置,并将瞄准环中心对准硬杆操纵舵面的翼梢,而后切换瞄准点至对准硬杆末端。考虑到气动干扰的影响和实际任务的需求,当受油机与硬杆距离过小时气动干扰过大,飞行员难以维持两机的相对位置;距离过大时受伸缩硬杆长度限制,无法完成受油任务,因此受油机可保持在加油机硬杆后9~15 m。如此周期性地改变瞄准点以评估受油机的重新定位能力,并尽力保持受油机与硬杆之间的距离不变。考虑到实际硬式加油任务的完成时间,整个机动应持续约60 s。 伸缩硬杆跟踪任务的完成效果由对瞄准目标的跟踪精度,也即在一定跟踪时间内的最小跟踪误差来表征。该任务完成效果的评定标准如表3所示。 表3 伸缩硬杆跟踪任务完成效果评价[8]Table 3 Performance standard of retractable hard rod for tracking task[8] 3) 加油机 空中加油任务要求加油机在对接和加油过程中保持航迹、姿态稳定。纵向航迹捕获任务[31]可用于评定空中加油时加油机的飞行品质,该任务能够很好地体现加油机的操纵灵敏度、大幅操纵响应特性、稳态特性和PIO特性等。 纵向航迹捕获任务开始前,试验机定直平飞,机动开始后,驾驶员操纵加油机爬升捕获目标航线。第20 s时遭遇纵向水平与垂向突风,驾驶员积极操纵尽力使加油机保持在距目标高度误差带以内。任务的完成效果由对纵向航迹的跟踪精度来表征,该任务完成效果的评定标准如表4所示。 表4 纵向航迹捕获任务完成效果评价[31]Table 4 Performance standard of longitudinal track tracking task[31] 2.2.3 对地攻击 在执行对地攻击任务时,攻击机需要具有优良的机动性,能够在低空低速时实现对地面目标快速地搜索与精确打击,并躲避敌防空火力的攻击。为规避地面的攻击,攻击机需进行低空/超低空的快速转弯、急滚等机动飞行[32]。因此选取的机动任务应当能体现出飞机的多轴姿态响应特性。空地精确跟踪任务包括快速切换地面目标、持续跟踪地面目标和稳定姿态等多个动作,可考察攻击机在一次对地攻击任务中快速截获并精确跟踪多个地面目标的能力,可作为评定对地攻击时飞机飞行品质的代表机动任务。 空地精确跟踪任务开始前,试验机离地面目标的初始距离应较远,允许其能对多个地面目标进行截获和跟踪。地面目标间距依赖于实际作战场景与评估需求,间距过大时飞行员操纵时间过于充足,无法有效评估攻击机快速截获和跟踪地面目标的能力;间距过小时飞行员反应时间过短,即使试验机性能优异,也很难完成任务。因此,地面目标间距可遵循以下标准:在与飞机飞行轨迹垂直的水平方向上,地面目标间距为18~55 m;在与飞行轨迹平行的方向上,地面目标间距为27~110 m。任务开始后,试验机以特定下滑角和速度飞行,飞行员操纵飞机截获第1个地面目标并进行跟踪,为模拟攻击任务,考虑到飞行员操纵与发射武器的时间,建议跟踪4 s以上的时间,然后截获并跟踪随后的地面目标。当飞机离地面目标距离较远时,截获和跟踪的目标可以在间距较大的地面目标间切换;当飞机离地面目标距离较近时,截获和跟踪的目标应该在间距较小的地面目标间切换(例如相邻的地面目标)。当完成最后1个地面目标的截获和跟踪后,需拉起飞机。整个机动过程如图8所示。 空地精确跟踪任务的完成效果由对地面目标的跟踪精度,也即在一定跟踪时间内的最小跟踪误差来表征。该任务完成效果的评定标准如表5所示[33]。相比前文介绍的交叉截获与跟踪任务,空地精确跟踪任务对跟踪的精确程度要求更高。以一级飞行品质等级为例,性能标准中所用的瞄准环由30 mil改为5 mil,目标位于瞄准环内的时间占比要求从50%延长为90%。 2.2.4 舵面破损 空战时,飞机可能因遭受攻击等出现舵面破损故障,导致其操纵效能下降,并会出现轴间耦合运动,对飞机的操纵特性影响较大,严重时会影响到飞机的飞行安全[34]。当俯仰轴与滚转轴运动发生耦合时,如果飞行员进行大幅操纵,易使飞机出现难以控制的耦合运动,且大过载机动可能会进一步增大受损部位的破坏程度,影响飞行安全。因此选取的机动任务应与飞机的多轴运动耦合特性有关。 多轴平显跟踪任务可以模拟空战时对目标机进行精确跟踪的作战场景。由于飞行员需要同时进行俯仰与滚转操纵,精确地控制飞机的多轴运动姿态,因此该任务能够充分地反映飞机的俯仰-滚转轴间运动耦合特性对其姿态精确控制能力的影响,可作为评定舵面破损飞机轴间运动耦合特性的机动任务。 多轴平显跟踪机动任务要求飞行员使用平显上的瞄准环与参考线,跟踪时变的俯仰与滚转姿态指令。起始时试验机作定直平飞,任务开始后,飞行员根据平显上命令条给出的俯仰与滚转姿态指令,通过操纵驾驶杆,快速捕获并跟踪这些指令,使命令条中心点进入平显画面上的瞄准环内,同时尽量消除参考线与命令条在滚转轴方向上的角度误差,如图9所示。平显上的命令条按照预先设定的俯仰与滚转姿态指令变化,平显上的命令条按照预先设定的俯仰与滚转姿态指令变化,为了充分暴露出飞机的运动耦合特性及其对姿态精确控制能力的影响,整个跟踪过程需持续较长的时间且应具备较高的精度。若跟踪时间太短,飞行品质问题不容易暴露,时间太长飞行员无法长时间集中精力。因此,考虑到跟踪精度以及飞行员注意力,建议以10 mil或20 mil瞄准环去捕获命令条的中心点(如图9所示),整个机动过程持续130 s[19]。多轴平显跟踪任务的完成效果由飞机对多轴姿态组合指令的跟踪精度来表征。文献[24]给出了任务完成效果的评定标准,如表6所示。 表6 多轴平显跟踪任务性能标准[24]Table 6 Performance standard of HUD tracking task[24] 文献[19]以F16战斗机为试验飞机,采用模型参考动态逆飞行控制律,通过调整参考模型的参数,完成了53种具有不同动态特性的试验飞机执行交叉截获与跟踪任务的地面飞行模拟试验。给出了能够反映近距空战任务对飞机闭环响应特性要求的特征参数及边界建议。 近距空战属精确且快速类任务[5],现从飞机初始响应的快速性与协调性、航迹与姿态响应的协调性、姿态响应的快速性与稳定性等3个方面,对比分析基于交叉截获/跟踪任务与现有典型飞行品质准则评定结果的差异。 3.1.1 初始响应快速性与协调性的要求 短周期模态自然频率ωsp能够反映飞机的初始响应快速性,操纵期望参数CAP主要反映飞机稳态响应与初始响应间的协调性。基于交叉截获与跟踪任务的评定结果同对应的单位迎角下的法向加速度nz/α及ωsp等效CAP准则评定结果的对比[19]如图10所示,其中,nz为法向过载,α为迎角,nz/α为单位迎角过载,ξsp为纵向短周期模态阻尼比。 由图10可见,近距空战任务要求ωsp大于2 rad/s,此值大于现有飞行品质准则规定的ωsp需大于1 rad/s的要求[4]。近距空战时,飞机需要通过较剧烈的机动,尽快地截获目标机,并在大幅机动时对扰动进行快速地补偿。由于机动幅度要明显大于现有飞行品质所适用的小幅机动,因此近距空战任务要求飞机具有更快的响应特性,需增大对最小ωsp的要求。 近距空战任务要求等效CAP大于0.6g-1·s-2,此值远大于现有飞行品质准则规定的0.28g-1·s-2[4]。近距空战时飞机的机动幅度较大,与现有准则主要适用于小幅机动相比,同样的稳态响应,飞行员希望飞机具有更快的初始响应速度,因而会要求飞机具有更大的CAP下边界。 3.1.2 航迹和姿态响应协调性要求 等效参数准则也称为ωsp·Tθ2与ξsp准则,主要是对飞机的ωsp·Tθ2与ξsp提出了要求,可考察飞机航迹与姿态响应间的协调性。基于交叉截获与跟踪任务的评定结果与对应的ωsp·Tθ2和ξsp准则评定结果对比[19]如图11所示。其中,Tθ2为俯仰姿态到航迹响应的时间常数。 由图11可见,基于交叉截获与跟踪任务的飞行品质等级评定结果与等效参数准则的评定结果并不吻合,而是呈现出自己的规律。在交叉目标截获与跟踪任务中评为一级飞行品质的试验飞机均满足: -1.82lgξsp+lg(ωspTθ2)≤lg6 (1) 即近距空战要求飞机具有较大ωsp·Tθ2的与较大的ξsp相匹配,较小的ωsp·Tθ2与较小的ksi,ξsp相匹配。 近距空战任务主要对飞机的姿态控制能力提出了要求,并不特别强调飞机姿态与航迹响应之间的协调性。由于较大的ωsp·Tθ2会导致较大的俯仰速率超调,因此近距空战中高增益的截获与跟踪机动对姿态响应可预测性的要求导致飞机需具有大的ξsp以缓和超调,增强稳定性,即当ωsp·Tθ2取值较大时,也要求取值较大的ξsp去与之匹配。 3.1.3 姿态响应的快速性与稳定性要求 基于交叉截获与跟踪任务的评定结果与现有的带宽准则评定结果对比[19]如图12所示,其中,ωBWθ为俯仰姿态带宽频率,τp为俯仰姿态相位等效时间延迟。 由图12可见,试验飞机的相位等效延迟基本相同,因此主要讨论交叉截获与跟踪任务对姿态带宽的要求。与带宽准则相比,该任务对最小姿态带宽的要求减小。通过试验获得的满足一级飞行品质要求的飞机姿态带宽约为4.3 rad/s,小于带宽准则规定的6.5 rad/s。 现有的带宽准则是针对飞机A种飞行阶段建立的,需要兼顾属于A种飞行阶段的各种不同飞行任务,其中包含要求带宽大于6.5 rad/s的机动动作。而在近距空战时,飞机机动幅度较大,人机闭环系统需跟踪的姿态指令信号频率会有所降低,因此对最小带宽的要求也随之减小。 1) 俯仰轴 交叉截获与跟踪任务主要关注飞机的姿态响应特性,俯仰姿态响应幅频曲线在频率取ωBWθ时的增益Mθ与飞行品质评定结果有较好的相关性[19]。因此选用俯仰姿态带宽频率ωBWθ与带宽频率处的增益Mθ这2个参数来表征对飞机空战飞行品质的要求。基于交叉截获与跟踪任务的评定结果,以及与之对应的ωBWθ和Mθ取值[19],如图13所示。 从图13可见,ωsp与Mθ的参数组合能够较准确地反映交叉截获与跟踪任务对战斗机飞行品质的要求。由试验结果拟合得到的飞行品质边界可作为近距空战任务对飞机俯仰轴飞行品质要求的建议,如表7所示。 表7 近距空战任务的飞行品质要求Table 7 Flight quality requirements for short-range air combat mission 近距空战时,要求飞机的姿态带宽ωBWθ大于4.3 rad/s。若带宽较小会导致飞机对目标截获的时间延长、对跟踪误差进行快速修正时稳定性下降。 该任务同时要求飞机的带宽处增益Mθ要小于-14 dB,不宜太大。由物理含义知,Mθ为带宽处的增益,若飞行员的增益为-Mθ,则ωBWθ将成为人机闭环系统的穿越频率,考虑到在ωBWθ处飞机的相位裕度即为45°,再叠加飞行员的操纵延迟后,人机闭环系统的相位裕度将小于45°的临界值[35],进而丧失稳定性。因此Mθ近似等于飞行员在近距空战任务中所能达到的最大操纵增益,能够表征人机闭环系统的稳定性对飞机姿态响应增益的要求。其次,从完成的过程来看,近距空战任务需要飞行员进行较高增益的操纵,应从人机闭环系统稳定性的角度对飞机的幅频特性提出要求,因此需要限制飞机的Mθ。 一级飞行品质区域右边界是对飞机姿态带宽的频率和带宽处增益的组合要求。该组合边界要求相当于对飞机短周期模态低阶等效系统的增益大小要求[19]。该值的大小会影响舵面操纵时飞机的姿态响应幅值,尤其是飞机的俯仰角速度变化率响应。从任务完成效果来看,对目标进行截获和跟踪均要求飞机具有良好的稳态响应预测性。若该增益取值过大时,飞机初始响应过快,稳态响应不易预测,导致精确跟踪的精度下降,飞行品质会变差。因此,近距空战任务对飞机姿态带宽的频率和带宽处增益这2个参数取值大小的协调性也提出了要求。 2) 滚转轴 基于交叉截获与跟踪任务的评定结果与对应滚转模态时间常数[19]如图14所示。 由图14可见,近距空战任务一级飞行品质要求飞机的滚转模态时间常数Tr取值在0.13~0.18 s之间,而现有飞行品质只对Tr的上限提出了限制,即要求Tr小于1 s[4]。常规飞行品质仅考虑快速性的要求,而在交叉截获与跟踪机动任务中,飞行员需要对滚转角进行快速且精确地控制,以完成对目标的截获和跟踪。Tr过大会导致滚转轴响应快速性降低;Tr过小会导致初始响应过快,稳态响应可预测性变差。 综上,近距空战任务对飞机姿态响应的快速性、稳态响应与初始响应的协调性有更高的要求,对姿态响应的稳定性要求稍有下降,对航迹与姿态响应的协调性无明显要求。该任务对飞机闭环飞行品质的要求与现有飞行品质准则并不相同,建议宜采用俯仰姿态带宽频率ωBWθ与在该频率处的增益Mθ作为近距空战任务的战斗机飞行品质评定特征参数,从而更准确地反映对其飞行品质的要求。近距空战任务的一级飞行品质要求飞机俯仰轴ωBWθ>4.3 rad/s、Mθ<-14 dB且(40lgωBWθ+Mθ)<20 dB,滚转轴时间常数0.13 s 文献[23]以F16战斗机为试验飞机,采用模型参考动态逆飞行控制律,通过调整参考模型的参数,完成了81种具有不同动态特性的试验机进行软式空中加油的地面飞行模拟试验;对比分析了评定试验与现有飞行品质准则评定结果的差别;给出了能够较准确反映软式空中加油任务对受油机闭环响应特性要求的特征参数与边界建议。 空中加油属于精确且缓慢的任务[5],因此从姿态响应的快速性与稳定性、航迹与姿态响应协调性两方面,对比分析基于软式空中加油任务与现有典型飞行品质准则评定结果的差异。 4.1.1 姿态响应快速性与稳定性要求 俯仰姿态带宽准则能够评定飞机姿态响应的快速性与稳定性[14]。基于任务的受油机飞行品质评定结果、对应的俯仰姿态带宽频率ωBWθ和相位等效时间延迟τp对比[23]如图15所示。 由图15可见,软式空中加油任务对受油机姿态带宽要求的下边界为2.75 rad/s,与带宽准则一级飞行品质的边界6.5 rad/s相比,软式加油对飞机姿态带宽的要求降低。软式空中加油虽对受油机航迹控制的精度要求很高,但并不要求受油机必须快速地实现稳定跟踪,飞行员可通过多次的小幅操纵对受油机的航迹进行微调,从而实现对受油机的准确定位,这与近距空战任务快速捕获目标的要求有较大差异[19]。因此软式空中加油任务主要强调受油机能对航迹进行精确地控制,而对姿态响应的快速性要求不高。 4.1.2 航迹、姿态响应协调性要求 软式空中加油任务主要关注受油机航迹响应的精确控制能力,基于探管-锥套式空中加油任务的评定结果与CAP准则、等效参数准则对比[23]如图16所示。 由图16可见,软式空中加油一级飞行品质对飞机最大阻尼比的限制能够由1.3增大至2;对最小阻尼比的限制基本不变。与常规A种飞行阶段的飞行任务相比,软式加油任务对受油机俯仰响应快速性要求有所降低,同时对控制精度的要求使得飞行员所能容许的受油机俯仰响应超调减小,因而较大的阻尼比也可获评一级飞行品质。 综上,等效CAP准则和等效参数准则都难以准确地评定受油机在空中加油任务中的飞行品质等级。因此,需要采用其他参数或其组合来反映空中加油任务对受油机航迹与姿态响应间协调性的要求。 1) 俯仰轴 在软式空中加油任务中,受油探头的位置同时会受到受油机姿态和航迹的影响,因此探头的精准定位主要依赖于受油机飞行员对航迹的稳定控制[15]。可见,软式空中加油任务要求受油机具有优良的航迹响应特性。基于空中加油时受油机的动态特性分析,建议可采用ωsp、Tθ2航迹响应带宽频率ωBWγ和航迹响应幅频曲线在频率取ωBWγ时的增益Mγ作为表征软式加油任务对受油机闭环响应特性要求的特征参数。 基于探管-锥套式空中加油任务的试验评定结果以及相应的ωsp与1/Tθ2和ωBWγ与Mγ,如图17所示。 通过对图17中获评1级飞行品质试验组所在区域的边界参数进行拟合,得到了图中虚线所围成的一级飞行品质区域,包括对ωsp、Tθ2、ωBWγ、Mγ及其组合取值的要求。具体取值边界建议如表8所示。 表8 软式空中加油的受油机飞行品质要求Table 8 Flight quality requirements of receiving aircraft based for soft aerial refueling mission 软式空中加油任务对受油机闭环响应特性参数的要求主要分为2部分,一是对等效参数ωsp与1/Tθ2的要求,二是对频域参数ωBWγ与Mγ的要求。 要求1对ωsp与1/Tθ2要求 一级飞行品质要求飞机俯仰轴的ωsp>2.25 rad/s、0.21<1/Tθ2<1。要使飞机具有优良的纵向航迹响应特性,要求其幅频特性曲线在飞行员操纵频率附近的斜率为-20 dB/Dec[4],而ωsp和ωsp共同决定了斜率-20 dB/Dec段的范围。过小的会导致俯仰航迹响应较慢,需要飞行员增大操纵增益并增加相位补偿才能实现航迹的精确控制,导致受油机难以准确地对准锥套,闭环响应特性变差,达不到一级飞行品质。过大的1/Tθ2会使得飞行员操纵负担增大,受油机飞行品质变差。此外,1/Tθ2是飞机俯仰速率响应传递函数的零点,若取值过小会导致俯仰速率响应产生较大的超调,航迹响应回落增大[2],增大了飞行员闭环跟踪的难度,因此要求受油机的1/Tθ2也不宜过小。 要求2对ωBWγ与Mγ要求 一级飞行品质要求飞机俯仰轴的ωBWγ>1.1 rad/s。ωBWγ反映了飞机航迹响应的相位特性,影响飞机在闭环任务中的航迹响应稳定性。在软式空中加油任务中,要求受油机能够快速准确地改变航迹,因此要求航迹响应带宽ωBWγ不宜过小,否则飞行员需要牺牲跟踪的精度,才能保证人机闭环系统的稳定性。 Mγ的大小反映了空中加油任务对受油机纵向航迹响应操纵灵敏度的要求。当灵敏度太高时,精确控制需要的操纵量过小,飞行员较难把控,易发生超调而导致操纵难度增加,从而使飞行品质变差,因此一级飞行品质要求Mγ<-10 dB。 软式空中加油任务对受油机ωBWγ和Mγ2个参数的组合Mγ+40lgωBWγ取值也有一定的要求:-13.7 dB<(Mγ+40lgωBWγ)<2 dB。随着ωBWγ的增大,人机闭环系统稳定性增强,飞行员会主动增加操纵增益从而保证对锥套进行更精确的跟踪,因此对受油机Mγ的上限要求会变低,即要求受油机在具备更高的ωBWγ时具有更低的Mγ,这就形成了对Mγ+40lgωBWγ上限的要求;当Mγ过小时,导致受油机航迹响应较小,此时要求飞行员施加的操纵幅度可能过大。而ωBWγ增大会使受油机响应加快,从而对飞行员大幅操纵导致的延迟有所补偿,降低了对Mγ最小值的要求。即软式加油任务允许受油机具有较高的ωBWγ时,可以具有较低的Mγ,这就形成了对Mγ+40lgωBWγ下限的要求。 2) 滚转轴 基于探管-锥套式空中加油任务的飞行品质评定结果、对应的滚转模态低阶等效系统的带宽ωp和操纵灵敏度Kp,如图18所示。 由图18可见,为获得一级飞行品质,建议ωp的取值在7.5~12 rad/s之间,Kp的取值在50(°)/s左右。 相对现有飞行品质规范给出的ωp大于1 rad/s的要求[36],软式空中加油任务对受油机ωp的要求有较大提高。与常规飞行任务相比,软式空中加油要求受油机对侧向航迹的调整幅度较小,而精度要求较高。因此受油机需要具有快速产生和消除滚转角的能力,对ωp的要求也会提高。但Kp也不宜过高,否则滚转初始响应太快,会导致稳态响应更难预测,从而降低受油机滚转轴飞行品质等级。 软式空中加油任务还要求飞机滚转轴的响应灵敏度Kp约为50/s,即在横向压满杆时,受油机所达到的稳态滚转角速度接近50(°)/s。现有飞行品质准则要求飞机能够在1.3 s内使滚转角达到至少90°[4],约为69(°)/s。与之相比,软式空中加油任务要求受油机具有较小的滚转轴操纵灵敏度。由于加油过程中受油机机动范围有限,飞行员不希望受油机的滚转响应幅度过大。此外,飞行员还需要对受油机的侧向位置进行频繁但幅度较小的反复修正,因而倾向于要求受油机具有较低的操纵灵敏度。 文献[37]对比分析了在飞行控制律设计时是否考虑加油任务飞行品质要求2种情况下软式加油机动的数学仿真结果。在轻度紊流的大气环境下,数字模拟计算的飞行高度7 600 m,速度195 m/s。采用2种飞行控制律受油机完成任务的状态变量时间历程如图19所示。 由数学仿真结果可知,2种飞行控制律下飞机在执行软式空中加油任务时均能保持较稳定的速度与俯仰角。考虑加油任务飞行品质要求时,受油机俯仰角收敛更快,超调较小且无明显振荡。存在轻度紊流的扰动环境下,在对接过程的15 s时,捕获锥套后不再出现超调,受油探管在1/2锥半径内时间占比100%;而仅考虑常规飞行品质要求时,受油机在20 s捕获锥套后出现了5次超调,受油探管在1/2锥套半径内时间占比58%,任务完成效果较差。 综上,软式空中加油任务对受油机姿态响应的快速性要求降低,对航迹与俯仰姿态响应间协调性的要求与常规飞行任务也有较大差异。该任务的飞行品质评定参数与现有飞行品质准则不同,建议可采用俯仰航迹带宽频率ωBWγ与在该频率处增益Mγ作为其飞行品质的评定特征参数,从而能够更有效地反映其飞行品质要求。一级飞行品质要求飞机俯仰轴的ωsp>2.25 rad/s、0.21 s-1<1/Tθ2<1 s-1、ωBWγ>1.1 rad/s、Mγ<-10 dB且-13.7 dB<(Mγ+40lgωBWγ)<2 dB;对于滚转轴,常规飞行品质准则的评定参数仍然适用,但由于软式空战加油任务的特点,一级飞行品质边界发生变化,要求 7.5 rad/s <ωp<12 rad/s、Kp的取值约为50°/s左右。 此外,文献[21]给出了硬式加油对受油机闭环响应特性要求。相比于软式加油,硬式加油对受油机的航迹控制精度要求有所降低。对于加油机而言,软硬2种空中加油任务对其的要求主要为航迹的稳定控制,文献[31]给出了对加油机闭环响应特性的要求。 文献[33]以F18战斗机为试验飞机,采用模型参考动态逆飞行控制律,通过调整参考模型的参数,完成了39种具有不同动态特性的试验机执行空地精确跟踪任务的地面飞行模拟试验。对比分析了评定试验与现有飞行品质准则评定结果的差异,给出了能够更准确地反映对地攻击任务对飞机飞行品质要求的特征参数与边界建议。 对地攻击与近距空战一致,均属于精确且快速类任务[5]。同样地,从飞机初始响应的快速性与协调性、航迹与姿态响应协调性、姿态响应的快速性与稳定性3方面,对比分析了空地精确跟踪任务试验与现有常用飞行品质准则(带宽、CAP、ωsp与nz/α以及等效参数准则)分别评定的结果差异[33],如图20所示。 由图20(a)可见,带宽准则1级飞行品质要求攻击机的俯仰姿态带宽ωBWθ大于6.5 rad/s。 相比之下,对地攻击任务对飞机俯仰姿态带宽的要求较低,ωBWθ大于3.5 rad/s时(图20(a)中虚线),即可获评一级飞行品质。ωBWθ主要表征了飞机姿态响应的快速性与稳定性。在本任务中,截获目标系地面上的静止目标,因此飞行员有较多的时间来调整飞机的姿态去进行截获。当切换截获目标时,攻击机机动幅度较大,此时人机闭环系统需要跟踪的姿态指令信号频率会有所降低,因此对最小带宽的要求也随之减小。 由图20(b)可见,空地精确跟踪机动任务对飞机飞行品质评定参数的要求与CAP准则并不一致。但获得1级飞行品质的试验结果大部分都分布在图中CAP准则一级飞行品质区域内,这表明CAP所表征的攻击机姿态稳态响应与初始响应间的协调性也是本机动所关注的特性之一,协调性不好,会造成响应难以预测,增加了精确跟踪的难度。 由图20(c)可见,获得一级飞行品质的试验结果均位于nz/α与ωsp准则的一级飞行品质区域内。nz/α表征了航迹响应相对于姿态响应的滞后关系。精确跟踪时,飞机的航迹响应特性也会影响飞行员对地面目标的瞄准,因此,如果飞机的航迹与姿态响应不协调,则飞行员需要花费较多的精力去完成俯仰轴的瞄准任务,从而影响飞行品质评分。nz/α与CAP之间有较强的相关性,ωsp与nz/α准则所给出的飞行品质等级与CAP等级是相关的。因此,合适的短周期自然频率ωsp与单位迎角过载nz/α的组合能够在一定程度上反映空地精确跟踪机动任务对攻击机闭环响应特性的要求。但该准则与CAP准则并不足以完整地表征出飞机对地攻击任务的不同飞行品质等级。 由图20(d)可见,等效参数准则也难以直接预测对地攻击任务的飞行品质等级。但从图中易发现,在本机动中获评一级飞行品质的参数组合主要集中于图20(d)中虚线的右方,即ωsp·Tθ2与ξsp需要满足如下关系: -1.88lgξsp+lg(ωsp·Tθ2) (2) 即较大的ωsp·Tθ2搭配较大的ξsp时,易于获得一级飞行品质。这是因为ωsp·Tθ2反映了飞机航迹与姿态响应之间的协调性,当ωsp·Tθ2过大时,会产生过大的俯仰角速率超调,此时,增大ξsp恰好能弥补飞机响应中出现较大超调带来的问题,因此图中的虚线右侧更易于获评一级飞行品质,即当ωsp·Tθ2取值大时,要求ξsp也取较大的值与之匹配。 1) 俯仰轴 空地精确跟踪任务主要关注攻击机的姿态响应特性,因此俯仰姿态带宽频率ωBWθ、俯仰姿态响应幅频曲线在频率取ωBWθ时的增益Mθ与飞行品质评定结果有着较好的相关性[33],基于空地精确跟踪任务的评定结果以及相应的ωBWθ和Mθ[33],如图21所示。 从图21可见,ωBWθ与Mθ的参数组合能够较准确地反映空地精确跟踪任务对攻击机飞行品质的要求。由试验结果拟合得到的飞行品质边界可作为对地攻击任务对飞机俯仰轴飞行品质要求的建议,如表9所示。 表9 对地攻击任务飞机俯仰轴飞行品质要求Table 9 Flight quality requirements of pitch axis for air-to-ground tracking mission 该飞行品质边界由5条直线构成,左边界由俯仰姿态带宽频率ωBWθ限制,一级飞行品质要求ωBWθ>3.5 rad/s。ωBWθ反映了飞机俯仰姿态响应的相位特性,影响飞机闭环跟踪时俯仰姿态响应的快速性与稳定性。对地攻击时,飞机距截获目标的距离越来越近,飞行高度越来越低,飞行员需要快速且精确地操纵飞机的姿态,在较短的时间内,用瞄准环捕获地面上多个分散的目标,因此对飞机俯仰姿态响应的快速性有较高的要求。过低的俯仰姿态带宽频率会增大飞行员改变飞机姿态的难度,增加截获时的超调次数,影响跟踪的准确性,降低对地攻击任务完成的效果。 飞行品质的上、下边界由姿态带宽频率处的增益Mθ限制。该参数表征了对地攻击任务对飞机俯仰姿态响应操纵灵敏度的要求,一级飞行品质要求-25 dB 对于右上方与左下方2个边界,由ωBWθ与Mθ2个参数的组合Mθ+1.98ωBWθ限制,一级飞行品质要求-6.87 dB<(Mθ+1.98ωBWθ)<-2.09 dB。随着ωBWθ的增大,人机闭环系统稳定性增强,飞行员会主动增加操纵增益来减小截获所用时间,因此对Mθ上限的要求降低,即要求飞机在具备较高的ωBWθ时,需具有较低的Mθ与之适配。如果ωBWθ与Mθ取值均较大,飞机的初始响应较快且灵敏度较高,飞行员难以精确调整姿态,易发生振荡。当ωBWθ与Mθ均较小时,飞机姿态响应较慢且灵敏度较低,飞行员难以大幅快速地改变飞机的俯仰姿态,延长了截获所用时间,难以取得满意的任务完成效果。 2) 滚转轴 基于空地精确跟踪任务的评定结果与对应的滚转模态时间常数对比[33]如图22所示。 由图22可见,空地跟踪任务要求飞机的Tr处于一定范围之内。其中,为获评一级飞行品质,建议Tr取值于0.08~0.25 s之间,为获评二级飞行品质,Tr取值小于0.67 s。所允许的最大Tr均小于常规飞行品质规定的1 s[4]。可见,与常规飞行任务相比,对地攻击任务对的要求更严格。 对地攻击任务属于大幅精确机动,飞行员需要频繁地修正飞机的姿态,以保证能够准确地截获与跟踪地面目标。同时,在飞行高度接近安全高度前,飞机应完成对多个地面目标的跟踪,因此对其滚转轴的初始响应速度有较高的要求,即要求滚转模态时间常数不宜过大。但过小的滚转模态时间常数会导致飞机出现过快的初始响应,使得稳态响应与初始响应不够协调,稳态响应更难预测,飞机的滚转姿态精确调整能力变差,难以获得一级飞行品质。 可见,对地攻击任务对飞机姿态响应的稳定性要求有所下降。现有飞行品质准则主要反映飞机姿态响应的快速性与协调性、航迹与姿态响应间协调性,不能对飞机攻击任务的飞行品质进行准确评定。对于俯仰轴,宜采用俯仰姿态带宽频率ωBWθ与在该频率处增益Mθ作为对地攻击任务飞机飞行品质评定特征参数。一级飞行品质要求ωBWθ>3.5 rad/s、-25 dB 舵面破损飞机闭环响应特性研究的重点在于提出可评价俯仰-滚转运动耦合程度的特征参数。旋翼机飞行品质规范ADS-33E-PRF[38]提出的频域参数kpq与kqp可用于表征俯仰-滚转运动耦合程度,亦可作为固定翼飞机多轴耦合飞行品质评定的特征参数[24]。其中:kpq=p/q;kqp=q/p。 kpq为俯仰输入引起的滚转角速度响应幅频曲线在某一特定频段内的平均值与俯仰角速度响应幅频曲线在该频段内的平均值之比。根据ADS-33E-PRF,该频段取为由副翼输入引起的滚转角频域响应的带宽频率ωBWφ至相位角为-180°时的频率ω180,也即通过在滚转轴上施加激励信号,得到滚转轴运动响应较为明显的频段(ωBWωBWφ至ω180)。滚转(俯仰)角速度响应幅频曲线在该频段内的平均值表征了飞机滚转(俯仰)轴运动幅值的大小。因此,kpq越大,表明在俯仰运动幅度相同的情形下,由俯仰运动引起的滚转轴耦合运动的幅值越大[39]。该参数的计算方法如下: 1) 在副翼偏角δa通道输入扫频信号来激励飞机,得到滚转角的时域响应φ。绘制φ/δa的伯德图,根据该图得到ωBWφ与ω180[2]。 2) 在升降舵偏角δe通道输入扫频信号来激励飞机,得到滚转角速度、俯仰角速度的时域响应p、q。 3) 绘制kpq的幅频特性曲线,将ωBWφ至ω180频段在对数坐标轴上均匀10等分,得到10个等分点对应的kpq频域响应的幅值,上述10个幅值的平均值即为kpq的大小。 kqp为副翼操纵输入时,引起的俯仰角速度响应幅频曲线在一特定频段内的平均值与滚转角速度响应幅频曲线在该频段内的平均值之比,主要关注作用于俯仰轴的耦合运动响应的幅度。该参数的计算方法与kpq类似[38]。 文献[24]以F16战斗机为试验飞机,采用模型参考动态逆飞行控制律,通过调整舵面破损比例系数,完成了35组不同破损程度的试验飞机执行多轴平显跟踪任务的地面模拟试验,得到了能够较准确地反映舵面破损飞机飞行品质要求的边界建议。飞行品质评定结果与相应的飞行品质特征参数的取值[24]如图23所示。 从图23可见,飞行品质特征参数kpq与kqp可以较好地预测具有不同轴间运动耦合程度飞机的飞行品质等级。舵面破损对飞机的飞行品质要求建议如表10所示。 表10 舵面破损情形飞行品质要求Table 10 Flight quality requirements for control surface damage kpq与kqp均与飞机舵面的破损程度成正比。随着舵面破损程度的增大,2种耦合效应均会同步增大,也即kpq与kqp具有一定的相关性,因此各试验组的飞机特征参数均处于2条点划线之内。该线的斜率表征了一架飞机kpq与kqp之间的固有关系。对于不同的飞机,该线的斜率不同。斜率的大小与飞机的转动惯量、舵面面积等参数相关。 不同等级飞行品质区域的分界线均为负斜率直线,也即为保证飞行品质不降级,要求kpq随kqp的增大而减小。这是因为随着kqp的增大,作用于俯仰轴的耦合运动的幅值增大,任务难度增加,飞行员需要花费更多的精力在俯仰轴操纵上,此时如果减小kpq的数值,也即减小了作用于滚转轴的耦合运动的幅度,减少了飞行员在滚转轴上所需分配的精力,从而使飞行品质不发生降级。 美国空军飞行试验中心的USAF Test Pilot School于2010年完成了针对固定翼战斗机轴间运动耦合飞行品质的Icarus研究项目[39]。Icarus项目研究结果与基于多轴屏显跟踪任务的飞行品质要求建议对比如图24所示。 图24的实线为Icarus项目得到的飞行品质边界,虚线为基于多轴屏显跟踪任务试验所得到的飞行品质边界建议。可见,2种边界建议的趋势一致,但基于任务的飞行品质特征参数取值要求高于Icarus项目的研究结果。这是因为在Icarus项目研究时并不针对战斗机具体的舵面故障类型,也未对舵面操纵效能、质量特性改变等进行分析与建模,只关注俯仰-滚转轴间运动耦合对飞机飞行品质的影响,更侧重于理论研究。在多轴屏显跟踪任务地面模拟试验研究的运动建模时,考虑了舵面破损后飞机质量/惯性特性不对称、操纵效能减小与不对称等导致的多轴耦合运动,因此,所得结果对轴间运动耦合特征参数kpq与kqp的取值要求更高,在图24中即表征为飞行品质边界更靠近左下方。 综上,舵面破损后对飞机运动特性的影响主要表征为俯仰-滚转运动耦合,提出的特征参数kpq与kqp可用于表征其对飞机闭环响应特性的影响。一级飞行品质要求(kpq+0.87kpq)<-19.1 dB、22.4 dB 1) 讨论了基于任务的飞行品质评定的机动任务主要性能指标,系统地介绍了基于任务的军用飞机飞行品质评定方法。 评估机动任务应来源于真实的作战任务场景,通过分析实际作战任务对飞机动态特性的要求,综合考虑飞行品质评估试验的安全性和可行性,将实际作战任务分解或简化,进而设计出适用于不同作战场景的飞行品质评估机动。通过基于CHR评分和PIO趋势的飞行品质主观评定以及客观评定,并综合考虑任务难度及其与飞行品质等级的对应关系,最终确定飞行品质的客观评定标准。 2) 根据4种典型作战任务/场景的特点和要求,讨论了基于任务与现有常用飞行品质准则评定结果的差异性,给出了反映不同作战任务对闭环飞机飞行品质要求的特征参数或组合、以及量化边界的建议。将现有飞行品质规范1级飞行品质的要求与本文基于任务的4种典型作战场景飞行品质评定结果进行汇总,对比结果如表11所示。 表11 现有飞行品质规范与基于任务飞行品质要求对比Table 11 Comparison of flying qualities requirements of traditional criteria and mission-oriented evaluation approach 近距空战任务主要关注飞机姿态响应的快速性、稳态响应与初始响应的协调性等特性。俯仰姿态带宽频率ωBWθ与带宽频率处的增益Mθ的参数组合反映了飞机姿态响应的快速性、操纵灵敏度稳态响应与初始响应的协调性,能够较为全面地表征近距空战任务对战斗机俯仰轴飞行品质的要求。滚转模态时间常数Tr反映了飞机滚转轴响应快速性与稳定性,能够表征近距空战任务对战斗机滚转轴飞行品质的要求。 软式空中加油任务主要关注受油机航迹响应特性。俯仰航迹带宽频率ωBWγ与带宽频率处增益Mγ的参数组合反映了飞机航迹响应的快速性、操纵灵敏度以及两者间的协调性,能够较为全面地表征软式空中加油任务对受油机俯仰轴飞行品质的要求。滚转模态带宽ωp和带宽频率处的增益Kp反映了飞机滚转轴响应的快速性与操纵灵敏度,能够表征软式空中加油任务对受油机滚转轴飞行品质的要求。 对地攻击任务主要关注飞机姿态响应的快速性、操纵灵敏度等特性。俯仰姿态带宽频率ωBWθ与带宽频率处的增益Mθ的参数组合反映了飞机姿态响应的快速性、操纵灵敏度稳态响应与初始响应的协调性,能够较为全面地表征对地攻击任务对飞机俯仰轴飞行品质的要求。滚转模态时间常数Tr反映了飞机滚转轴响应快速性与稳定性,能够表征对地攻击任务对飞机滚转轴飞行品质的要求。 舵面发生破损故障时,飞机飞行品质的等级受舵面操纵效能以及俯仰-滚转轴间耦合运动的影响。特征参数kpq与kqp反映了飞机俯仰-滚转运动耦合程度,能够较好地表征舵面破损对战斗机飞行品质的影响。2.2 典型评估机动任务设计
3 近距空战对飞机闭环响应特性要求
3.1 与现有飞行品质准则评定结果的对比
3.2 近距空战对飞机闭环响应特性的要求
4 软式空中加油对受油机的闭环响应特性要求
4.1 与现有飞行品质准则评定结果的对比
4.2 软式加油对受油机闭环响应特性的要求

5 对地攻击对飞机闭环响应特性要求
5.1 与现有飞行品质准则评定结果的对比
5.2 对地攻击对飞机响应特性要求
6 舵面破损对飞机闭环响应特性要求
6.1 多轴耦合飞行品质特征参数
6.2 舵面破损飞机飞行品质要求
7 结 论