空中加油程序简析
2019-07-22王继亮
王继亮
(航空工业西安飞机工业(集团)有限责任公司,陕西 西安 710089)
1 引言
空中加油技术在现代战争中得到了广泛的应用和发展,与现代战争已密不可分。国外有些军事评论家把空中加油技术称为“提高飞机作战效能的一个关键”。美国军用规范更是这样规定:“所有新机都应具备空中加油能力或具有供空中加油使用的空间和结构措施”。空中加油技术在现代战争中已属于一种战略措施。因此,加油机与受油机是怎样配合完成空中加油的呢?空中加油过程大致分为以下几个阶段:会合阶段、编队阶段、对接阶段、加油阶段、退出阶段。
2 会合程序
加油机和受油机会合有以下几种方式:同向会合、定时定点会合、预定空域待机会合、对飞会合。
2.1 同向会合
加油机和受油机从同一机场起飞,组成一个编队,加、受油机在预定空域进行空中加油,加油完毕后,加油机返航。此方式多用于“伙伴”式加油。
福科特会合,是一种有序出航的会合程序,通常用于目视气象条件下加、受油机由同一机场行动的情况。
伴随出航/伙伴爬升,受油机先起飞,并且在加油机起飞时完成目视盘旋;随后,受油机加入正在爬升的加油机编队。该方法的优点:①受油机不会暴露在重型加油机的尾后紊流下;②如果受油机不能正常工作,其可在起飞后加油机升空前知道。
尾追出航,加油机在受油机之前起飞。
2.2 定时定点会合
这种会合使用较多,就是加、受油机按预定的时间和预定的空域会合。会合是根据指挥所指挥或协同作战计划进行的。由于加、受油机起飞的机场不同,飞行的航线不同,因此,加、受油机必须保持联络,互相通报各自的位置、航向、高度和速度。确定距离后,使自己位于加油机的后侧下方一定位置,然后保持与加油机沿同一航向飞行,为即将进行的对接作准备。
定时定点会合程序有很多,下面以阿尔法会合为例。阿尔法会合是一种由雷达控制站指挥完成的会合程序,雷达控制站为路基、海基或空基(早期预警),该会合通常用于引导受油机找到位于空中加油空域或锚定区域内的加油机。
要求雷达操纵员能够主动控制空中受油机,将其引导至加油机后方1.85 km,下方300 m处。建立目视联系后,受油机开始缓缓爬升至加油机的尾后位置(硬管式)或观察位置(软管—锥套式)。
加油机(群)按锚定航迹飞行,保持在基本空中加油高度。通常,转弯坡度为15°或25°。
采用左拐弯的环形跑道,跑道短边的长度为13~37 km。13 km适用于小型、低速的加油机,比如KC-130加油机;37 km适用于大型、高速的加油机。长边标准长度为92.5 km。模式的位置由锚点和进入航线方向决定。单架加油机或加油机编队均可使用此锚定模式。按照规定,不同的加油机或加油机编队之间的垂直间距为1 200 m。通常情况下,认为900 m是加油机编队之间的最小安全垂直距离。
2.3 预定空域待机会合
在预定空域加油区,加油机按不同高度层次配置几个加油带,加油机事先在该区等待受油机,此方式多适用于大机群作战,比如海湾战争等。
为了避免空中加油时受到敌方攻击,加、受油机的加油区域或会合点要严格保密,往往不允许地面指挥或加、受油机之间联络。这种会合通常加油机要提前几分钟到达预定的会合空域作等待航线飞行,等待受油机到来。会合程序与定时定点会合基本一致。
2.4 对飞会合
当加、受油机相距较远,两机相对飞行时,需要保持一定的高度差(50~200 m),高度差的大小视两机的距离、天气条件和飞机驾驶员的技术水平而定。一般情况下,两机的距离越近,高度差就应该相对减小,以便受油机搜索发现加油机。在两机接近到一定间距采用无线电联系。因此,加、受油机应设有自动引导设备,如塔康、惯性导航等。现代化战争已采用预警机、卫星导航及全球定位系统,确保加、受油机准确、安全会合。
布拉弗会合,是基于航向的会合程序,它将同时使用加油机和受油机上的机载设备。在加油机或受油机导航设备的精确性有疑点或降级时,最适合使用本程序。此外,该会合程序还有一个优点,因为它不需要预先知道空中加油航线。然而,需要指定会合初始点(RVIP)、受油机进入航线和会合控制时间。这种会合程序能够迎合未安装空中截击雷达的受油机的需求,也适于为大型或战伤的受油机加油。
3 单架加油机的编队情况
战术空中加油包括一架加油机和一架或多架受油机,受油机单独或分批加入编队进行加油,然后离开。
3.1 气象条件
对于目视气象条件,受油机将被引导并保持在观察位置或重新编队区域,形成编队形式。从编队的前方观察,整个编队的宽度不得超过1.85 km,并且受油机必须保持在加油机高度上下60 m的高度层内。
3.2 观察位置
加油机将左侧分配给正加入编队的受油机。受油机观察位置的具体位置由加油机上有无尾后观察员或硬管加油员决定。
3.2.1 无加油观察员的加油机
加油机无尾后观察员时,受油机需向前机动到加油机机翼前缘线前的观察位置,以便让加油机飞行员看见和识别。
3.2.2 有加油观察员的加油机
当加油机有尾后观察员或硬管加油员时,观察位置处于加油机机翼前缘线之后。
4 软式加油程序
各国加油软管标识各具特点,加油信号灯也不尽相同。现以美国KC-135加油机上的MkB-753翼下吊舱为例,讲解空中加油程序。Mk32B-753翼下吊舱,黑色软管伸出吊舱长22.5 m,管管有MA-4接头和1个可折叠锥套稳定伞。软管上有一系列0.3 m长的白色标记和2个0.6 m宽的橙色带。橙色带之间的距离同绿状态指示灯结合表明输油方位。
4.1 基本操作
为了让燃油流动,软管必须被推进至少1.5 m,到达第一个橙色标记带所指示的位置,达到此位置时,绿色状态指示灯会亮。
4.2 受油机动作
受油机飞行员需要保持在最佳输油位置。这时,软管正好伸展在两个橙色标记带之间。最佳输油的位置范围是:内限16.4 m,外限21 m。这给受油机的前后移动提供了一个4.6 m的移动范围。
4.3 受油机太近
如果软管被推进过多,黄色状态指示灯将会闪亮,如果此时软管长度小于15.2 m,输油将会停止。当软管拉出到15.8 m后,输油会重新开始。
4.4 加油流程
受油管-锥套式加油流程如图1所示。
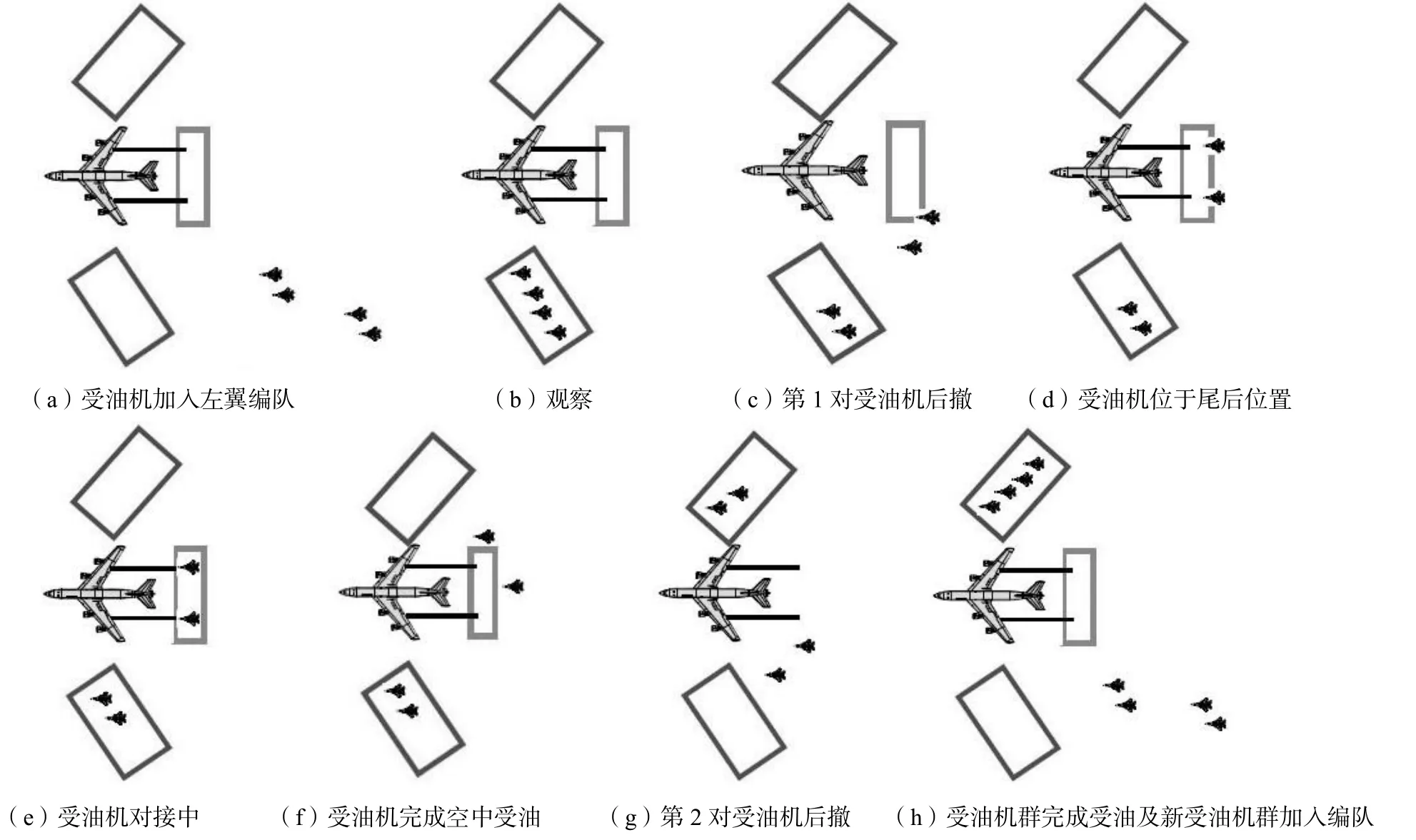
图1 翼下吊舱式加油机的受油机群加油流程
5 解散程序
加油完成后,受油机将被告知可安全进入重新编队位置。如果有2架或2架以上的受油机,则其应在加油机的右侧成梯队进行重新编队,第一架受油机靠近加油机,其他受油机按顺序移至重新编队位置。
解散的时候,受油机群可从重新编队位置水平或爬升飞离加油机。因为其他受油机很可能从下方加入加油机编队,所以受油机在离开加油机编队时,通常不能采用下降离开的方法。
6 结论
本文对空中加油程序进行了分析和研究,对中国的空中加油程序完善有借鉴意义。
