Research on Unattended Loading Technologies of the New Generation Launch Vehicles
2022-10-29LIMiaoSUNLijieWANGBinZHENGZhenQIYemin
LI Miao,SUN Lijie,WANG Bin,ZHENG Zhen,QI Yemin
Aerospace System Engineering Shanghai,Shanghai 201109
Abstract: According to the unattended loading requirements of the new generation launch vehicles,auto-docking technology for the first stage fill-drain connector and zero-second quick detachment technology for the second stage fill-drain connector were proposed based on the analysis and summary of unattended loading connector technology at home and abroad.These technical solutions were verified to be reasonable and feasible by tests,and they had been successfully applied to the Long March 6A (LM-6A),laying a foundation for the unattended test and launch of the new generation launch vehicles.
Key words: launch vehicle,unattended,automatic docking,zero-second detachment
1 INTRODUCTION
Unattended and rapid launch is the development trend of launch vehicles at home and abroad.Unattended loading technology can greatly improve the automatic loading level of the launch vehicles,and improve the rocket launch reliability,safety and launch efficiency.Advanced foreign launch vehicles have basically realized unattended loading process through the automatic docking and the zero-second detachment technology of the fill-drain connector.Although launch vehicles in China have achieved automation in the loading process,the state preparation,pipeline withdrawal,and the state inspection before and after the loading still require personnel to participate.Chinese launch vehicles are facing a severe challenge due to the high-density launches today.Thus,improving the automation level of loading equipment and carrying out research on unattended fill-drain connector technology is an effective way to solve the aforementioned challenges and improve China’s technology level for launch vehicles.
2 RESEARCH STATUS OF UNATTENDED LOADING SYSTEM
The unattended loading of foreign launch vehicles is mainly realized through the zero-second detachment technology of the fill-drain connector,such as the Falcon 9 and the Atlas 5.In the 21st century,the United States began to concentrate on the researches of auto-docking connector technology,and successively carried out the remote intelligent docking systems and automated ground umbilical systems (AGUS).
The AGUS program completed the development of related products and applied them to the Ares rocket.The second-stage integrated connector and its docking system are shown in Figure 3.
The docking process of the connector requires manual assistance.The automatic docking between the connector and the interface on the rocket body is completed after the hinge is docked,so that the expected fully automatic docking was not realized.As shown in Figure 4,the remote intelligent connector docking system consists of a docking panel,a robot vision system,a flexible motor control system and a tactile sensing system.This technology has not been implemented in the engineering applications.
The research on the auto-docking technology in Russia started early.The former Soviet Union carried out the design and application of auto-docking integrated connectors in the 1960s -1970s to realize the process of unattended loading and discharging.Typical rockets were Cyclone and Zenith.
The Cyclone was the first rocket in the world to adopt the fully automatic preparation and launch technology.It adopted an auto-docking system to complete the docking and detachment of the ground connector and the gas,electric and liquid interfaces of the rocket.The connector and the auto-docking system are shown in Figure 5.The middle part was the electrical and pneumatic pipelines,and the fuel and oxidant liquid pipelines were on the two sides of the system.
The Zenit was the second rocket to be launched fully automatically after the Cyclone.It was also one of the rockets with the highest degree of automation.In addition to the air-conditioning connectors,the Zenit only had three connectors for the entire rocket,including a combined kerosene connector,a combined liquid oxygen-helium connector and a combined gas-electric connector.As shown in Figure 6,the three connectors all adopted auto-docking technology.The combined kerosene connector and liquid oxygen-helium connector both fall off before the takeoff,and the gas-electric connector falls off at the zero-second.

Figure 1 Falcon 9 launch vehicle

Figure 2 Atlas 5 launch vehicle
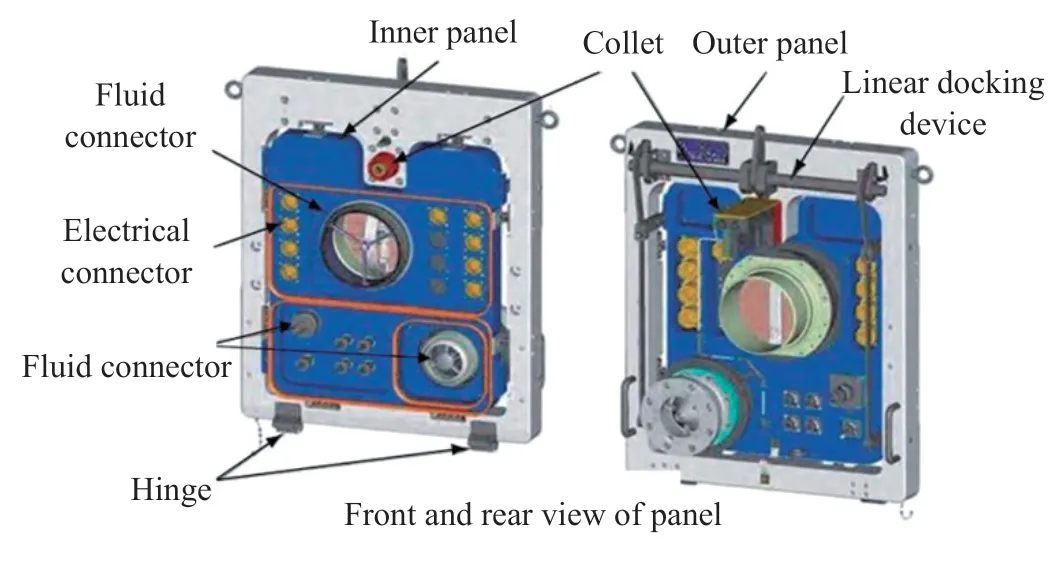
Figure 3 The second-stage integrated connector of the Ares rocket

Figure 4 Remote intelligent connector docking system
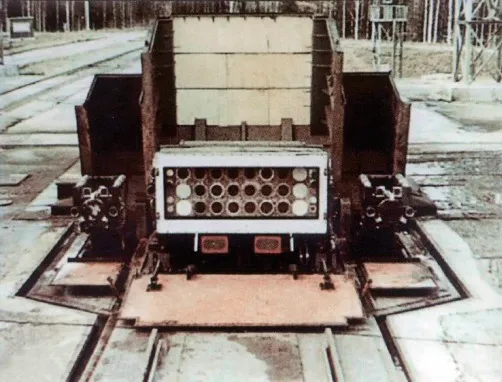
Figure 5 Gas-electric-liquid auto-docking system of Cyclone
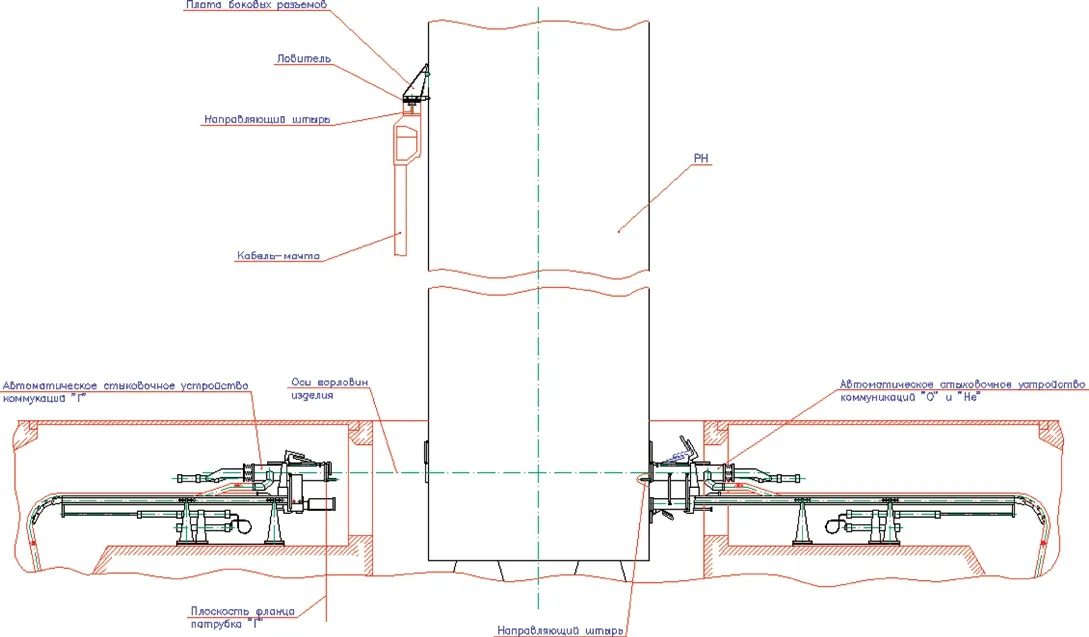
Figure 6 Gas-electric-liquid auto-docking system of Zenit
The rocket-ground connectors of launch vehicles in China basically have the ability of auto-detachment.However,except for the liquid oxygen fill-drain connector of LM-5,which initially had the auto-docking capability,the rest of the rocket-ground connectors were all manually docked.Moreover,except for the bottom rocket-ground connector of LM-5,LM-6 and the hydrogen emergency exhaust connector of LM-5,other launch vehicle rocket-ground connectors have not adopted zero-second detachment technology,which means that manual docking of the rocket-ground connectors is needed when the launch is suspended.
3 KEY TECHNOLOGIES OF THE UNATTENDED CONNECTORS
3.1 Key Technologies of Auto-docking
3.1.1 Dynamic positioning and auto-centering technology
Under the influence of wind,the rocket body,connectors and the pipeline will shake randomly.Therefore,it is difficult to achieve rapid positioning,automatic adjustment of centering,docking and locking under complex working conditions.The auto-docking system needs the capability of dynamic measurement and tracking,and can obtain the position information of the moving target under different meteorological conditions such as rain,snow,and fog,so that the system can adjust attitude of the connector to complete the centering and docking with the moving target.
3.1.2 Flexible docking technology
During the docking process of the connector with the interface on the rocket,it is necessary to ensure the flexibility of the system to avoid any equipment deformation,excessive force or sealing failure caused by the impact and hard connection.The comprehensive use of active and passive technology is needed to adjust the force direction,which can not only avoid a hard collision or placement during the docking and retraction process,but also ensure the required force to achieve the safe docking and retraction.
3.1.3 Optimal method under slight shaking of the rocket during the loading process
During the loading process,the rocket will sink as the propellant increases in the rocket.In addition,due to the influence of external forces such as wind,the rocket will slightly shake or move in an indeterminate direction.The optimal method needs to follow the movement between the connector and the rocket body during the loading process,so adopts a large-scale,extensive and suspended flexible design which is also aiming at zero lag and avoiding structural damage or extra stress generated during the process.Moreover,in order to reduce the motion load of the follow-up system,the light-weight design of the auto-docking system mechanism is urgently needed to improve the tracking speed.
3.1.4 Low temperature sealing technology in the secondary docking
Anti-freeze,low-temperature thermal insulation and low-temperature sealing structure technology are adopted to solve the problem of sealing reliability under low temperature conditions during the secondary docking.After loading,the connector will have frost and freezing problems due to low temperature.It is necessary to take measures to overcome the above problems to eliminate their influences on the secondary docking,then detect and judge whether the secondary docking conditions are met,and confirm whether the secondary docking is reliable.
3.2 Key Technologies of Zero-second Detachment
3.2.1 High reliability locking technology for connectors
After the connector is locked with the valve on the rocket,it is necessary to ensure that the connector is reliably locked and leak-free under static loads such as pipelines and propellants as well as the dynamic loads such as fluid scour,wind and the engine vibration during the ignition.Meanwhile,it is necessary to solve the contradiction between the requirements of reliability during locking and the restraining force of the rocket body caused by passive unlocking and passive breaking or falling away.
3.2.2 High reliability detachment technology for connectors
The highly reliable detachment of the connector is very important.The zero-second detachment of the connector is carried out after rocket take-off has been initiated.The failure of the connector to fall away may have a serious impact on the structure of the rocket and the take-off attitude,which will affect the success of the launch.There have been accidents in the U.S.in which the umbilical device could not be detached from the rocket,causing the umbilical device pipeline broken by the rocket and hence severely damaged the rocket tank.The occurrence of such an accident will cause partial or complete failure of the launch.Therefore,strict requirements are placed on the reliability of the connector falling away.The zero-second detachment process includes a fast response to the detachment command,reliable unlocking from the multi-point locking state and passive unlocking,passive destruction detachment method to ensure the reliable detachment in extreme cases,for example,when the detachment mechanism is stuck or the detachment gas supply fails.
4 TECHNICAL SOLUTIONS FOR THE UNATTENDED CONNECTOR
According to the unattended requirements of the next-generation launch vehicle,it was determined that the first stage fill-drain connector adopts auto-docking technology and the second stage fill-drain connector adopts zero-second detachment technology on the basis of the investigation at home and abroad.
4.1 Auto-docking Technology Scheme
The first stage fill-drain connector can realize flexible auto-docking and auto-detachment through the auto-docking system.The auto-docking system consists of a fill-drain connector,a protection system,a docking and detachment system,a position detection system and a control system,as shown in Figure 7 and Figure 8.
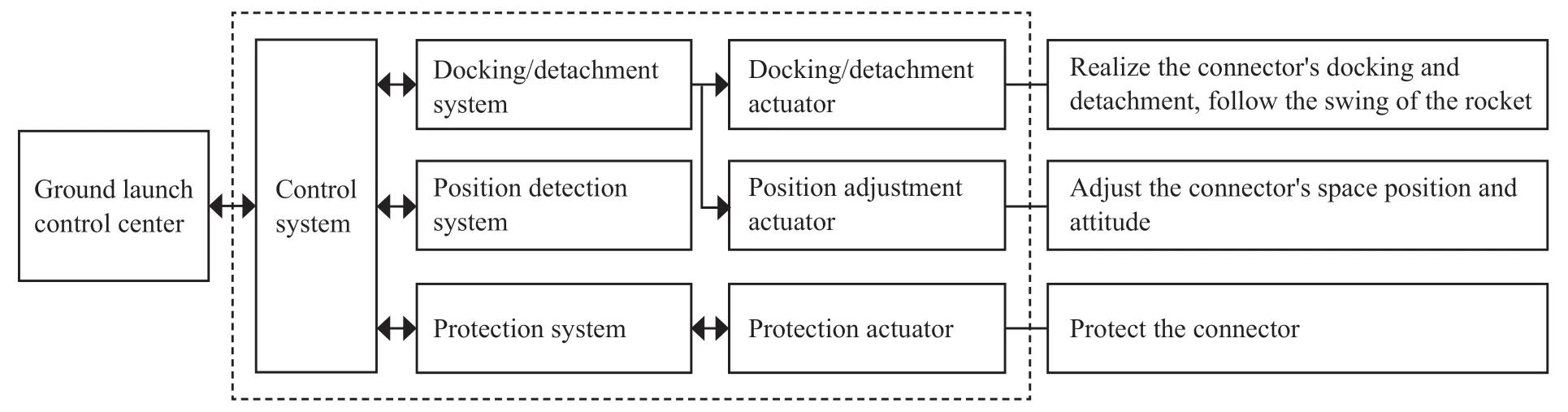
Figure 7 Schematic of auto-docking/detachment system
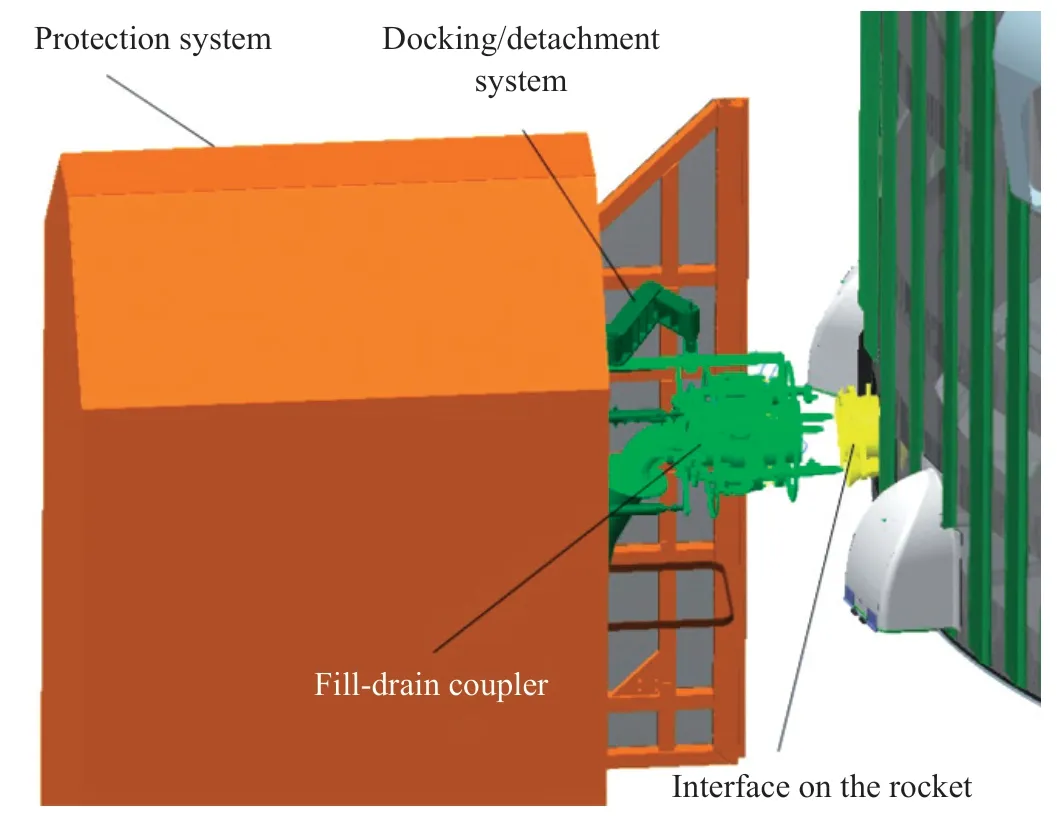
Figure 8 Structure of auto-docking/detachment system
The working principle of the auto-docking system is as follows: after the control system receives the docking command from the ground control center,the auto-docking system obtains the position information of the dynamic interface on the rocket through the position detection system.Then the docking and detachment system adjusts the attitude of the fill-drain connector,and completes the centering and docking with the rocket.The docking and detachment system adopts a mechanical passive structure with tolerances,which can avoid a strong collision or excessive pulling force during the docking or detachment process as well as equipment deformation,excess force generation or sealing failure.In the process of propellant loading,with the increase of the propellant in the tanks,the rocket body will sink.In that case,pneumatic balance technology is used to enable the filling pipeline to stay in a suspended state with the connector and follow the motion of the rocket.This technology can take account of the shaking of the rocket and the force caused by the wind load and refueling,which could result in leakage.The fill-drain connector adopts a vacuum insulation and nitrogen blowing technology to prevent frost and icing after low-temperature propellant passes through,which would affect the detachment of the connector.Thus,the interior of the connector and the sealing ring are all under positive pressure,which can avoid the formation of ice on the sealing ring and the sealing surface.This prevents the connector from being unreliable when it is docked again,which could result in propellant leakage.
4.2 Zero-second Detachment Technology Scheme
The second-stage fill-drain connector adopts a zero-second detachment system to realize the manual docking of the connector and zero-second detachment after taking off is initiated.The zero-second detachment system consists of a fill-drain connector,a detachment mechanism,a protective device,and a gas distribution table as shown in Figure 9.
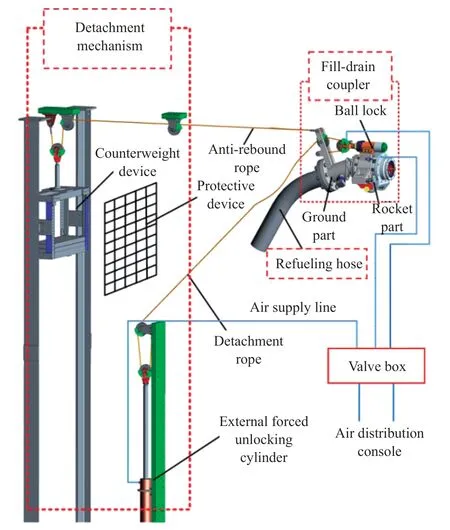
Figure 9 Schematic of the zero-second detachment system
The fill-drain connector is composed of the upper part on the rocket and the ground part.When it falls away,the ball lock connecting these two parts is unlocked,and the ground part is separated from the upper part to complete the detachment.There are two ropes set in the detachment mechanism,which are the anti-rebound rope and the detachment rope.The anti-rebound cable is tightened by a counterweight device,so as to recover the fill-drain connector into a protective device in the tower.The detachment cable is a redundant detachment executive component.When in a relaxed state,a corresponding slack margin is reserved according to the sway range due to the influence of wind load and the amount of sinking during propellant loading.
In order to ensure the reliability of the zero-second detachment,four unlocking and detaching methods are set up.
1) The first method (active unlocking and detaching): supply compressed air to the internal cylinder of the ball lock on the fill-drain connector,and pulling an unlock lever to realize the unlocking and detaching.
2) The second method (actively forced unlocking and detaching): supply compressed air to the forced unlocking cylinder,and pulling the unlock lever on the filldrain connector through a detachment cable to achieve unlocking and detaching.when detaching,the second measure and the first measure work at the same time.
3) The third method (passive unlocking and detaching during take-off): when the inner cylinder of the ball lock and the external forced unlocking cylinder fail,the falling away cable is gradually stretched and stressed as the rocket takes off,thereby pulling a ball lock release lever on the fill-drain connector to achieve unlocking and detaching.
4) The fourth method (passive destruction and detaching during take-off): when the ball lock on the fill-drain connector is completely stuck and cannot be unlocked by the above three methods,as the rocket continues to take off,the force provided by the cable will break a breaking pin installed on the rocket to ensure detachment of the fill-drain connector.
5 TEST VERIFICATION
According to the boundary conditions during real operation,the auto-docking system of the fill-drain connector has been subjected to a series of performance tests,deflection tests and reliability tests.The test process is shown in Figure 10.The test results show that the difference between the position value of the fill-drain connector and the target value is less than ±5 mm,and docking is accurate and smooth.After the second docking,the sealing performance of the connector is 1×10Pa·m/s.The auto-docking time is less than 5 mins.And the auto-detachment and complete protection time is less than 2 mins.
The zero-second detachment system of the secondary filldrain connector has also been subjected to a series of performance tests,deflection tests and reliability tests according to the boundary conditions under real operation.Figure 11 shows the test of zero-second detachment system.The results show that the fill-drain connector falls away quickly,the four unlocking and detaching methods are effective,and the detaching time was less than 0.3 s.
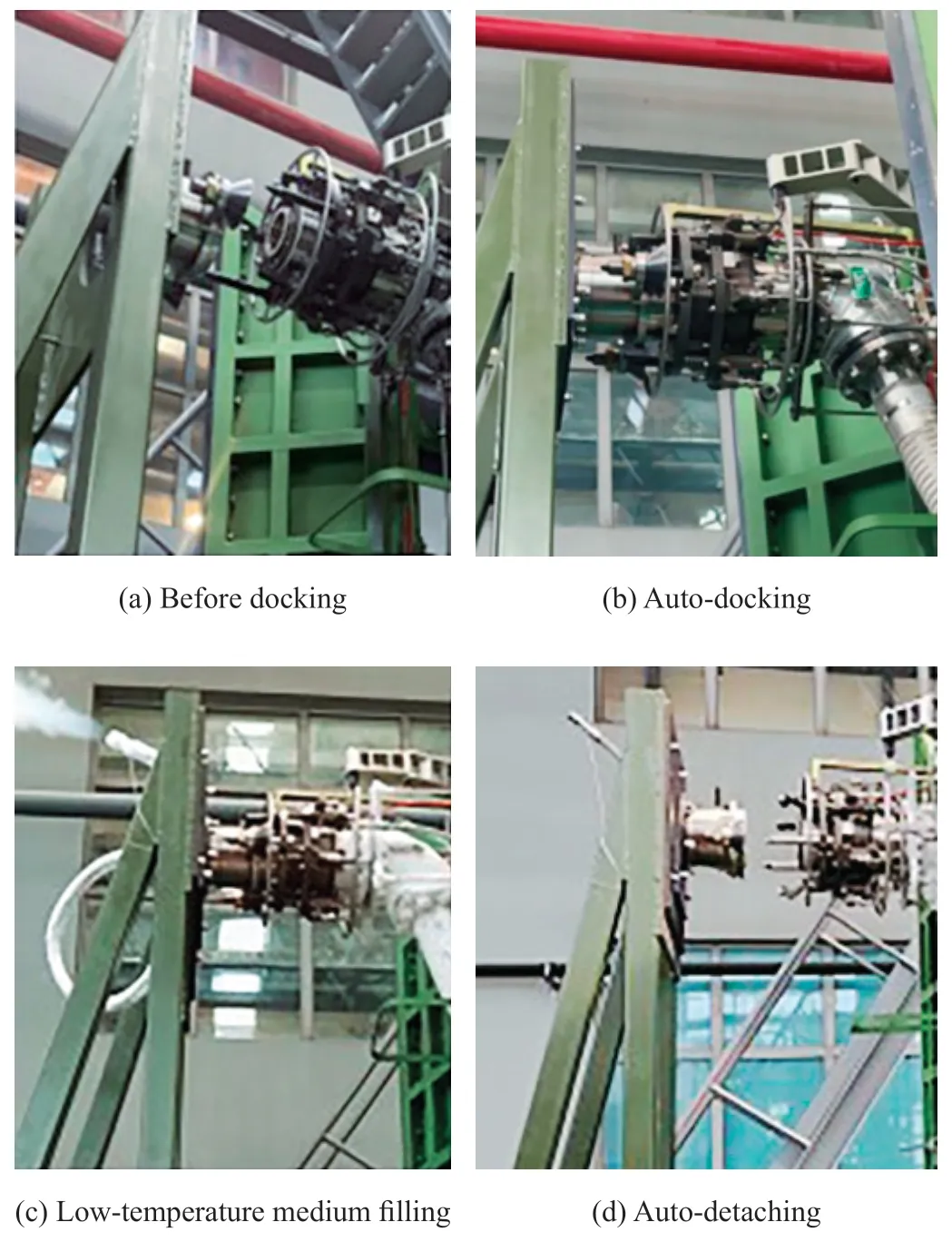
Figure 10 Auto-docking test

Figure11 Zero-second detachment test
6 CONCLUSIONS
On the basis of investigation of the technical solutions for unattended loading at home and abroad,the key technologies of the unattended connector were summarized.According to the unattended requirements of the new generation launch vehicles,auto-docking technology and zero-second quick detachment technology were proposed for the fill-drain connector.It has been verified through experiments that these technical solutions are reasonable and feasible,and can meet the unattended loading requirements of the launch vehicles.
The application of the auto-docking technology and zero-second detachment technology of the fill-drain connector can realize the unattended process of propellant loading,discharge,testing and launching.Furthermore,it can fulfill the capability to delay or wait at any stage before loading,dealing with a delay of the launch for a long period between loading to launch,which greatly improves the adaptability and safety of the launch mission.
杂志排行
Aerospace China的其它文章
- Adaptive Reconfiguration for Launch Vehicle Under Servo Mechanism Fault
- Application and Research of High-Power Electric Servo System on Launch Vehicle
- Research and Application of High-Voltage Power Supply and Distribution on Launch Vehicle
- Research on Key Technologies of Segmented Solid Rocket Booster
- Research on Modal Test Technology of LM-6A Solid-Liquid Strap-On Launch Vehicle
- Study on the Effect of Solid Particles on Jet Flow and Base Thermal Environment for Solid-Liquid Bundled Rocket