Adaptive Reconfiguration for Launch Vehicle Under Servo Mechanism Fault
2022-10-29HUCunmingZHANGWeidongZHOUJingZHANGYifengLIGuifangXUXice
HU Cunming ,ZHANG Weidong ,ZHOU Jing ,ZHANG Yifeng ,LI Guifang ,XU Xice
1 Shanghai Aerospace Control Technology Institute,Shanghai 201109
2 Shanghai Academy of Spaceflight Technology,Shanghai 201109
3 Nanjing University of Aeronautics and Astronautics,Nanjing 210016
Abstract: This paper investigates the servo mechanism reconfiguration and fault tolerance control issue for a launch vehicle.Firstly,the servo reconfiguration algorithm is considered as an optimization model,and commonly used optimization algorithms are analyzed and compared.An improved method based on Singular Value Decomposition (SVD)for solving the suboptimal solution of the direct assignment problem is proposed,being suitable for engineering application,while maintaining the advantages of existing algorithms.Theoretical analysis and simulation results confirm that the proposed method is able to provide the optimal reconfiguration strategy with higher computational efficiency.Finally,the numerical simulation of launch vehicle fault tolerance control fully verifies the feasibility and effectiveness of the improved method,which indicates that the method met the engineering application conditions.
Key words: launch vehicle,adaptive reconfiguration,pseudo-inverse method,linear programming,hybrid optimization method,SVD
1 INTRODUCTION
The new-generation strap-on launch vehicle adopts modular design.In order to improve the control capability,both the core-stage engine and the booster motors participate in attitude control,resulting in an increase in the number of servomechanisms with higher fault probability.To ensure the safety and reliability of the launch vehicle during flight,considerable efforts have been made in designing servomechanisms with high-reliability and redundant reconfiguration control method of servomechanisms.During the current research,the common reconfiguration methods can be summarized as non-optimal allocation methods and optimal allocation methods based on whether an optimization technique is used or not.Several non-optimal allocation methods have been presented including the allocation by proportional coefficient,allocation by directive requirements,incremental chained allocation.At the same time,optimization algorithms have also been proposed such as pseudo-inverse method,linear programming methodand quadratic programming method.
At present,the reconfigurable flight control is mainly adopted in the aircraft control scenario,and the reconfigurable control of launch vehicles has not been widely considered.Feng Hao et al.adopted an off-line control strategy and reconfigured the stuck fault of a launch vehicle servomechanism based on the principle of a constant control moment.Bodsonproposed an iterative pseudo-inverse method,which has the disadvantage of causing a considerable average error when the expected target is unreachable.The swing angle assignment with servomechanism fault is translated into a 1-norm single objective constrained optimization so attitude control reconfiguration is realized by linear programming as proposed by Cheng Tangming et al..Peterson et al.concluded that the optimal solution for constrained quadratic programming had a slow convergence rate and was not suitable for real-time control.Huang Panxing et al.took the position of the saturation constraint into account,and proposed a hybrid optimization control strategy combining the pseudo-inverse method and the fixed-point method for heavy-lift launch vehicles.
In this paper,an adaptive reconfiguration method with higher computational efficiency and small error is proposed to realize the control reconfiguration caused by the fault of a launch vehicle servomechanism.The paper is organized as follows:Sec.2 provides a simplified model for launch vehicle control;Sec.3 presents the detailed analysis of an improved algorithm based on Singular Value Decomposition (SVD);and the simulation results are demonstrated in Sec.4 before the conclusions.
2 SIMPLIFIED MODEL FOR CONTROL ALLOCATION OF A LAUNCH VEHICLE
In this paper,a strap-on launch vehicle equipped with four boosters is taken as the research object.The core-stage engine and the booster motors have the same thrust and maximum swing angle.The layout of engines,motors and servomechanisms are shown in Figure 1.
To evaluate the impact of servomechanism faults on attitude control,it is necessary to adopt the servomechanism model in a closed-loop control scenario,therefore,the complete closedloop control flow chart is shown in Figure 2.

Figure 1 Layout of engines,motors and servomechanism of a launch vehicle

Figure 2 Closed-loop control flow chart of launch vehicle with control allocation and synthesis
In the figure,is the servomechanism synthesis model,andis the servomechanism allocation matrix.When the number of servomechanisms exceeds the number of control chan-nels,the control input that can be allocated to each servomechanism is not unique.For this reason,optimal control under certain criteria can be achieved by adjusting thematrix when some servomechanisms fail.
Based on the layout of engines,motors and servomechanisms,a dynamic model of launch vehicle considering the engine vibration equation can be established as follows:


Model-related expressions and symbolic meanings can be found in the literature [16].For the above dynamic model,the state variableand the control inputcan be recognized,and the state space model is obtained as:

whereis the state variable,δdenotes the equivalent swing angle,denotes the ma-nipulated variable of each servomechanism,andis the synthetic equivalent swing angle matrix of each servomechanism.
3 IMPROVED ALGORITHM BASED ON SVD
According to research,the optimization algorithms of control reconfiguration methods mainly include the pseudo-inverse method,linear programming method,and hybrid optimization method.In this section,the analysis and comparison of the existing methods are made,and an improved SVD method is proposed.The pseudo-inverse method is easy to realize,and its complex computation can be realized off-line.However,it may cause a control coupling problem.The linear programming method always keeps the optimal output collinear with the target equivalent swing angle vector,but it requires a real-time linear programming solver,which is not feasible for engineering applications.In the meantime,some other problems exist such as the hybrid optimization method may not be able to converge to a feasible solution,and that the optimization result is often coupled with the control system.To resolve these issues,this paper proposes an improved algorithm based on SVD taking the advantages and disadvantages of the existing methods into account and the requirements of the engineering application.
The optimization objective of the improved algorithm based on SVD is the same as that for the linear programming method.The input solution set is calculated under the condition of unconstrained input,and the initial solution is obtained by minimizing the infinite norm of the solution of set elements.The initial solution is the solution most likely to satisfy input constraints.
The manipulated variable of each servomechanism is calculated as:

4 PERFORMANCE AND SIMULATION
4.1 Performance Comparative of Different Methods
Based on the comparison of pseudo-inverse method,linear programming method,hybrid optimization method and the improved method,further performance simulations are conducted for each optimization algorithm by taking an example servomechanism fault.The evaluation factors used in the simulations mainly include computational efficiency,error of equivalent swing angle,manipulation energy consumption,and vector angle of equivalent swing angle.
In the simulation,δ =[δφ δ δ] =[0.1:40 5 5],the maximum amplitude limit of swing angle is taken as 5°,and the failure of21 and41 mechanisms is simulated.The simulation results of the above algorithms are shown in Figure 3.
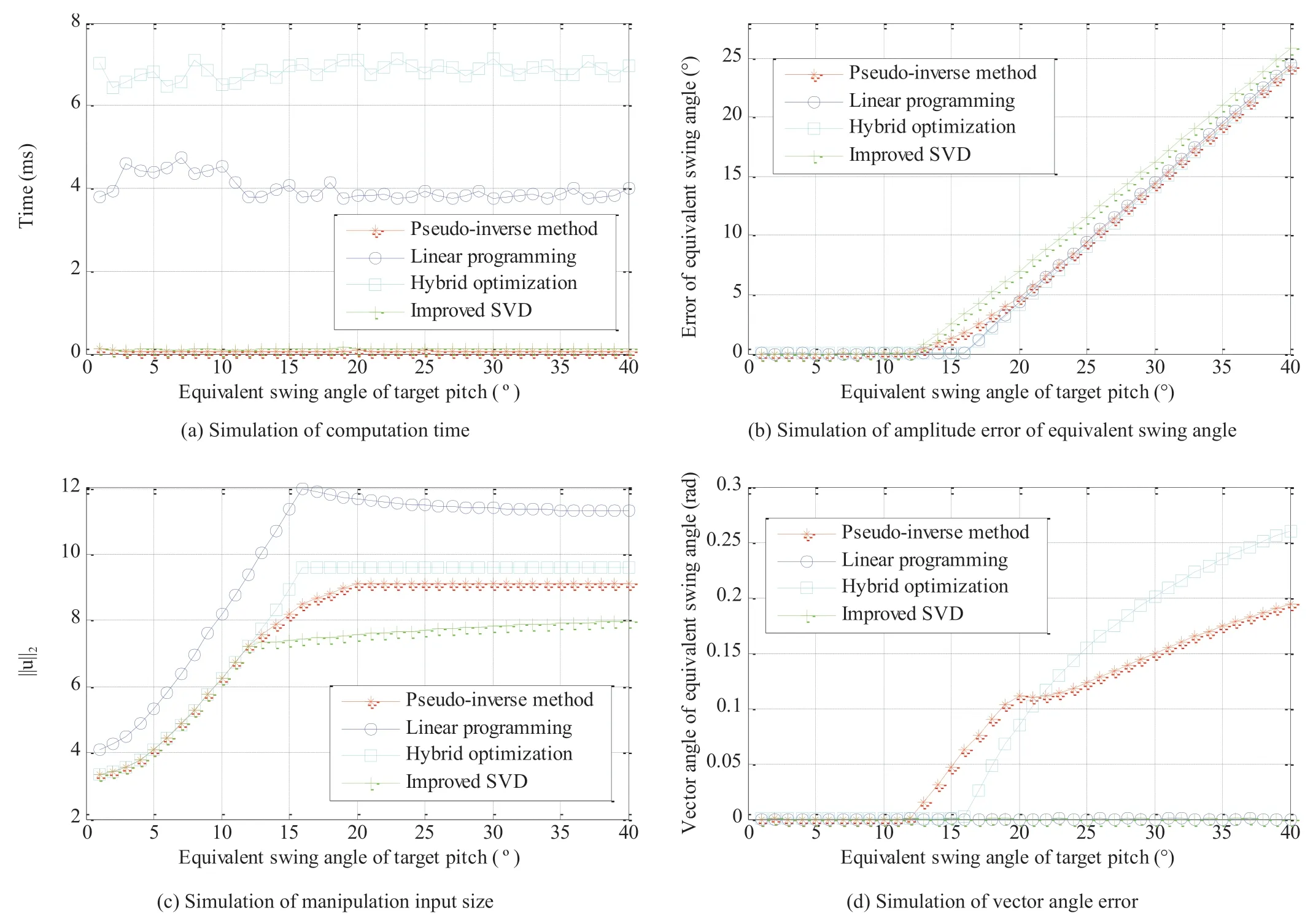
Figure 3 Comparison curves for performance evaluation of optimization algorithms
For the improved algorithm based on SVD,a feasible solution set consisting of all the solutions satisfying the allocation equation is firstly obtained by removing the constraints,and the target equivalent swing angle can be accurately generated by the solution set.Next,the feasible solution set is adjusted by scaling till a new feasible solution set is contained within the hyper plane formed by constraint boundaries.After that,by minimizing the infinite norm of the feasible solution,the scaling factor is maximized to obtain the optimal manipulation input satisfying collinear characteristics.Finally,the computational efficiency is improved by estimating the minimal infinite norm.As can be seen from the simulation of computation time in Figure 3(a),since the norm estimation is used in the improved method,the iterative process is eliminated,and the computational efficiency is significantly improved.Therefore,the improved method and the pseudoinverse method have the highest computational efficiency.The linear pro-gramming method requires iterative solution,which leads to an increase of computation time.The computation time of the hybrid optimization method is directly related to the number of iterations.A large number of iterations will significantly increase the computation time,while a small number of iterations will impact the convergence effect of the hybrid optimization algorithm.The simulation curve of equivalent swing angle amplitude in Figure 3(b) shows that the improved method based on SVD has a slightly greater amplitude error than the linear programming method and the pseudo-inverse method.The improved method selects the optimal solution with collinear characteristics for all feasible solution sets,and can obtain the same solution as linear programming when norm estimation is not used.The norm estimation improves the computational efficiency while introducing estimation error.The comparison of manipulation input in Figure 3(c) shows that the improved method has a smaller manipulation input.As the manipulation input may fall into the constraint boundary easily,due to the iterative process of linear programming,the servomechanism may move too much and enter into a saturation state.The hybrid optimization method considers the equivalent swing error and the manipulation energy consumption comprehensively by weighing,so that the manipulation energy consumption is relatively low.Compared with the pseudo-inverse method,the improved method uses a scaling factor,so that the manipulation input is relatively small.The vector angle simulation results in Figure 3(d) which shows that the improved method and the linear programming method have no direction error in the target equivalent swing angle vector because of their col-linear output characteristics.However,the direction error of the hybrid optimization method and the pseudoinverse method will increase with the target equivalent swing angle.
4.2 Simulation and Verification of the Improved Method
To evaluate the feasibility and effectiveness of the improved method,simulation and verification based on the launch vehicle were conducted.
The condition of the simulation example is: at 30 seconds after take-off,the21 of booster I is stuck at 5°,and at 50 seconds after take-off,the41 of booster III is also stuck at-5°.The comparison of simulation results is shown in Figures 4-9.
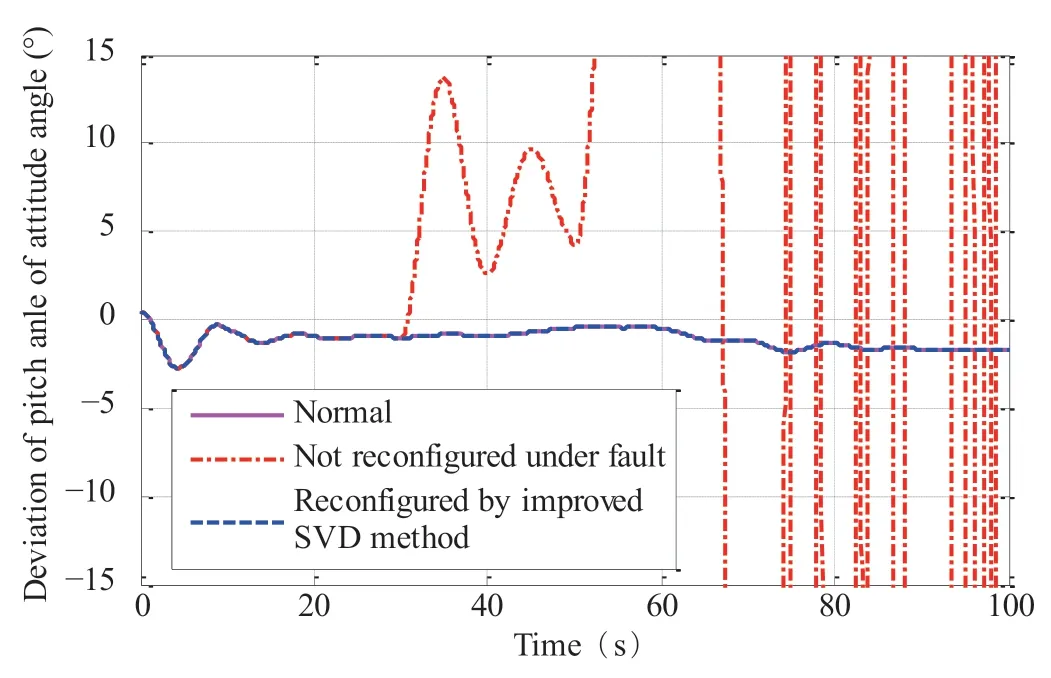
Figure 4 Comparison of the deviation curves of pitch attitude angle

Figure 5 Comparison of the deviation curves of roll attitude angle
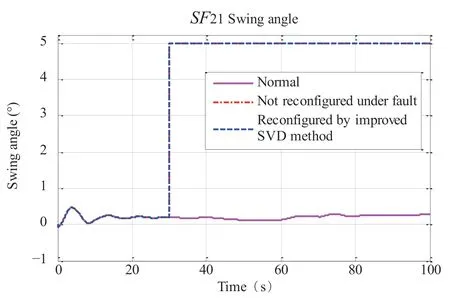
Figure 6 Comparison of the swing angle curves of servomechanism SF21

Figure 7 Comparison of the swing angle curves of booster servomechanism SF41
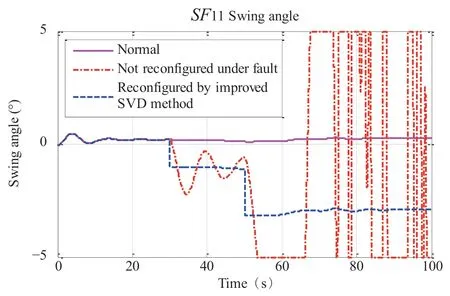
Figure 8 Comparison of the swing angle curves of corestage servomechanism SF11
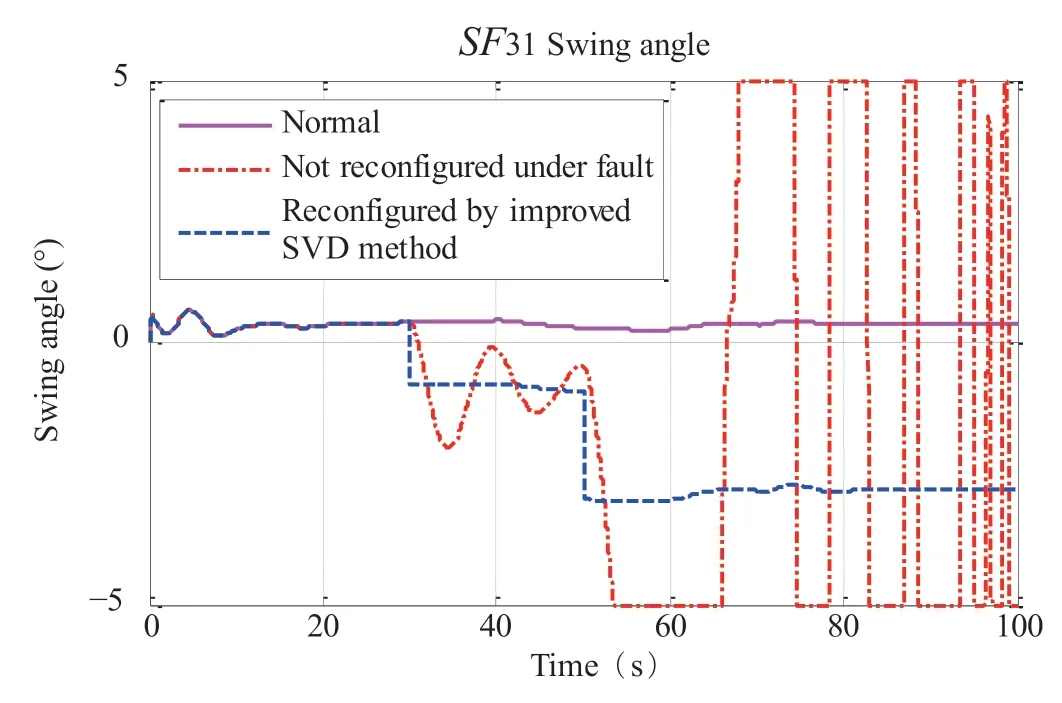
Figure 9 Comparison of the swing angle curves of booster servomechanism SF31
As can be seen from above,if reconfiguration is not performed within 30 seconds after21 is stuck,the swing angle of the remaining servomechanisms will increase at 30-50 seconds depending on the robustness of the launch vehicle,and the attitude angle deviation will converge after oscillation.However,when the fault occurs to41 at 50 seconds,the swing angle saturates and the attitude will rapidly diverge.In such a case,if the improved method is used for on-line allocation,the control moment can be quickly reconfigured to keep the attitude angle deviation consistent within the normal state and thus maintain the system stability.In this way,the feasibility and effectiveness of the method are confirmed.
5 CONCLUSIONS
This paper studies the control reconfiguration problem under the fault condition of servomechanisms with the strap-on launch vehicle.Three commonly used optimization algorithms are evaluated,and an improved method based on SVD is proposed in order to improve the calculation performance.The simulations show that the improved method combines the high computational efficiency of the pseudo-inverse method and the collinear output of the linear programming method.Furthermore,the feasibility and effectiveness of the improved method based on SVD was fully verified by numerical simulation of the fault reconfiguration control for the launch vehicle servomechanism,showing that the method is suitable for engineering applications.
杂志排行
Aerospace China的其它文章
- Research on Unattended Loading Technologies of the New Generation Launch Vehicles
- Application and Research of High-Power Electric Servo System on Launch Vehicle
- Research and Application of High-Voltage Power Supply and Distribution on Launch Vehicle
- Research on Key Technologies of Segmented Solid Rocket Booster
- Research on Modal Test Technology of LM-6A Solid-Liquid Strap-On Launch Vehicle
- Study on the Effect of Solid Particles on Jet Flow and Base Thermal Environment for Solid-Liquid Bundled Rocket