高速公路隧道与互通立交衔接段异质交通流演化规律
2022-10-27祝可为陈荣峰
祝可为, 陈荣峰
(1.福建船政交通职业学院 土木工程学院, 福建 福州 350007;2.福州大学 土木工程学院, 福建 福州 350108)
在我国发展道路交通建设的同时,高速公路隧道出口与互通立交间距过近的现象出现地愈发频繁,隧道与互通立交的间距过小会导致衔接段的交通流状态变得十分复杂[1]。研究高速公路隧道与互通立交衔接段交通流演化,能够对衔接段的通行能力及交通安全起到积极作用。汽车技术与人工智能等新兴技术的结合造就了自动驾驶车辆的出现[2]。在自动驾驶车辆逐步普及的过程中,智能网联车辆(Connected and Autonomous Vehicle,CAV)与人工驾驶车辆(Human-driving Vehicle,HV)将长期混合存在于道路中,这种CAV与HV混合的交通流称之为异质交通流。在异质交通流环境下,高速公路隧道与互通立交衔接段的交通流状态演化的复杂性将会进一步加剧。
自适应巡航控制(Adaptive Cruise Control,ACC)及协同自适应巡航控制(Cooperative Adaptive Cruise Control,CACC)是两种典型的CAV纵向跟驰模型[3-5]。已有学者对混入智能车的异质交通流进行了稳定性、通行能力和安全性方面等的研究[6-8],通过元胞自动机(Cellular Automata,CA)模型对交通流进行数值仿真模拟,对异质交通流的演化机理、交通流基本图进行探究[9-11],然而较少有文献涉及异质交通流环境下的隧道与互通立交衔接段的换道模型。隧道出口与互通立交衔接段作为高速公路的瓶颈路段,其交通状况较为复杂,是拥堵及事故高发点[12],对衔接段交通流运行演化机理进行研究,可以缓解该路段的拥堵提高车辆运行效率及安全性。
智能驾驶员模型(Intelligent Driver Model,IDM)的参数数量少、意义明确且与经验符合很好,并且能用统一的模型描述从自由流到完全拥堵流的不同状态;CACC自动驾驶车辆采用基于PATH实验室跟驰模型来确定加速度,通过安全距离与车间距比较直接决定采用加速、匀速、减速之一行驶,避免如NaSch模型先加速再减速以及随机慢化,并在车间距较小时采用安全性减速[10]。由此,本文以高速公路隧道与互通立交衔接段为研究对象,从微观驾驶行为角度进行描述,选取IDM和CACC模型分别作为传统车辆、ACC车辆和CACC车辆的跟驰模型,构建在异质流交通环境下的纵向跟驰模型。基于高速公路隧道与互通立交衔接段车辆的行驶特性,建立横向换道模型。利用数值仿真,考虑不同异质流组成、限速控制和衔接段尺寸,模拟不同场景下的高速公路隧道与互通立交衔接段交通流演化,探究衔接段的交通演化机理,为异质交通流环境下高速公路隧道与互通立交衔接段的交通管控提供理论依据。
1 异质交通流模型
1.1 交通仿真场景设置
高速公路隧道与互通立交衔接段路段仿真场景如图1所示。其中起始段为隧道区域,禁止车辆换道;衔接段(区域B)和下匝道路段(区域C)非下匝道车辆车辆可自由换道,内侧车道下匝道车辆以正常换道规则换道至外侧车道,根据匝道驾驶规则驶离高速。
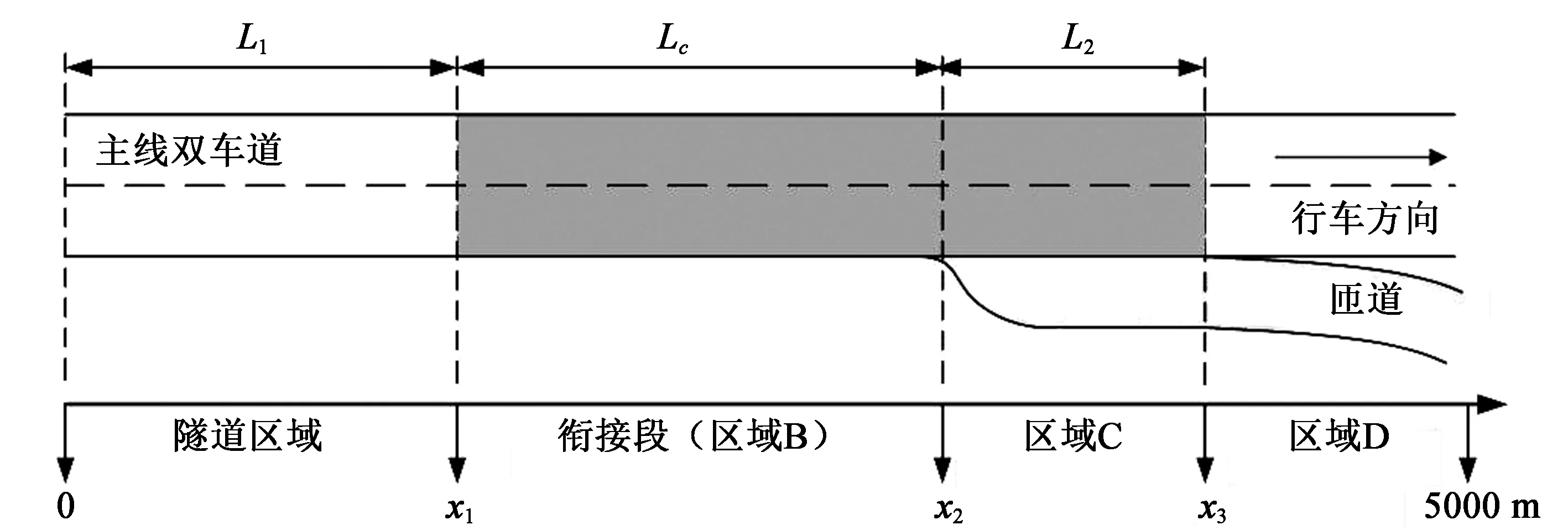
图1 隧道立交衔接段交通系统示意图
1.2 纵向跟驰模型
Treiber等[13]提出的智能驾驶模型由两项构成,包含自由状态下的加速趋势和考虑与前车碰撞的减速趋势,其具体方程为
(1)
式中a为车辆加速度,v为车辆当前速度,vf为最大速度,s0为最小安全间距,T为安全车头时距,b为期望减速度,Δv车辆与前车的速度差,h为车头间距,l为车长。ACC车辆较HV车辆有更短的反应时间及跟车时距,故ACC车辆的T取1.1 s,HV车辆的T取1.6 s。
美国加州PATH实验室提出CACC模型[14],表达式为
(2)

本文考虑CAV和HV特性改进安全速度构建NaSch模型,从t到t+1时,交通演化规则如下[15]:
加速规则
vn(t+1)→min[vn(t)+an,vmax],
(3)
减速规则
vn(t+1)→min[vn(t),vsafe],
(4)
(5)
随机慢化规则
vn(t+1)→max[vn(t+1)-b,0],
(6)
辅助变量更新
yn(t+1)→yn(t)+vn(t+1),
(7)
位置更新
xn(t+1)=xn(t)+fix[xn(t+1)],
(8)
yn(t+1)=yn(t)-fix[yn(t+1)],
(9)
式中vmax为道路限速,vn(t)为当前时刻速度,vn+1(t)为前车当前时刻速度,vn(t+1)为下一时刻速度,dn(t+1)为下一时刻车间距,bmax为最大减速度,d为车头间距,DR为车间通讯距离(限制取120 m),fix[x]为对x向零方向取整函数。
1.3 横向控制模型
对于非下匝道车辆的换道行为,HV与CAV在安全前提条件下都倾向于换道至行驶环境更好的车道,CAV相较于HV对行驶过程中的各种信息感知更为敏感,对安全距离的要求相对更小,可用换道安全系数λ进行控制[16]。以下以向左换道进行换道条件说明:
换道动机:
(10)
HV安全条件:
(11)
CAV安全条件:
(12)

对于下匝道车辆,换道安全条件与非下匝道车辆一致,仅换道动机改变:
(13)
2 元胞自动机仿真实验
本文设置主线双车道及匝道的CA模型,采用开放性边界条件,设主线上尾车位置为xlast,当xlast>vmax,则一辆车速vmax的车以概率pmain进入CA模型中。设置每个元胞长度1 m,车辆长度6 m占6个元胞,整个仿真道路长度L=5000 m,共计5000个元胞。x1、x2、x3为划分各区段长度的参数,其中x1=2000,即隧道区域长度L1=2000 m,x2=2000+Lc,x3=2000+Lc+400,即衔接段(区域B)长度为Lc,下匝道区段(区域C)长度L2=400 m,见图1。主线双车道限速为vmax,匝道限速60 km/h,主线进车概率pmain=0.6,其他参数设置见表1。

表1 仿真参数
为分析异质交通流环境下衔接段几何长度、异质交通流组成以及限速控制对衔接段运营通行能力的影响,控制这3个变量进行数值仿真,得到了衔接段长度分别为300、500、700、900、1100 m下,不同异质交通流组成和限速控制场景下衔接段的平均流量,如图2所示。可以得到:随着交通流中自动驾驶车辆比例的增加及限速值的提高,隧道与立交衔接段的交通量总体上逐步增加,呈现上升趋势。
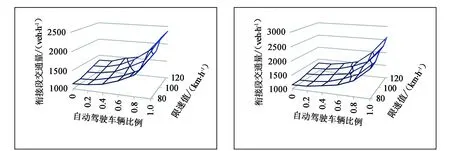
(a)Lc=300 m (b)Lc=500 m

(c)Lc=700 m (d)Lc=900 m
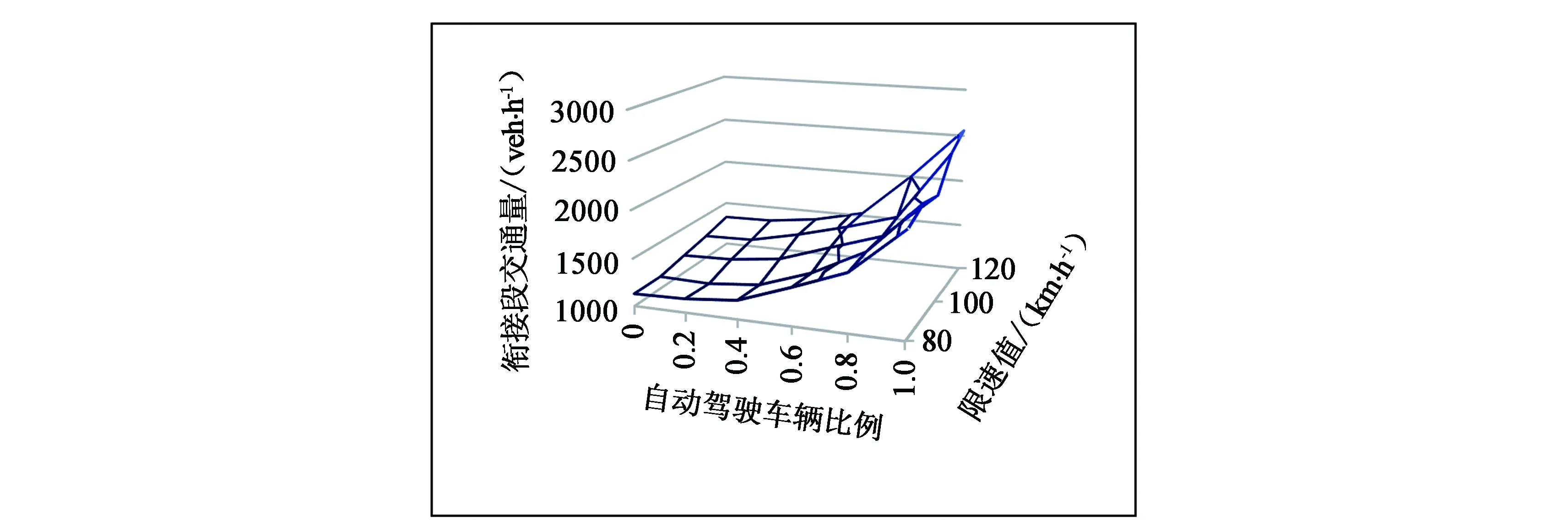
(e)Lc=1100 m图2 不同衔接段长度下衔接段交通量
3 仿真结果分析
为了进一步探究不同限速控制、异质交通流组成以及衔接段几何长度对衔接段交通流运行的影响情况及其演化机理,选择不同的控制参数进行组合,具体分析在不同场景下衔接段的运营通行能力变化情况。
3.1 固定自动驾驶车辆比例和限速值时,衔接段长度对运营通行能力的影响
从图2可以得到,相对于其他情况,在较高的自动驾驶车辆比例及较高限速值的情况下,衔接段长度对流量的影响较为明显。故选取自动驾驶车辆比例为1、限速值为120 km/h的场景进一步研究衔接段长度的影响,仿真数值见表2。

表2 衔接段长度对交通流量变化的影响(p=1,v=120 km/h)
从表2中可以看出,在自动驾驶车辆比例为1、主线限速值为120 km/h,衔接段长度为300 m时,衔接段的平均交通流量为2367 veh/h,随着衔接段长度增加,平均交通流量达到2547~2596 veh/h不等。相比于衔接段长度为300 m,当长度为500~1100 m时,衔接段的运营通行能力都有7.6%~9.67%的提高,在300 m到500 m这一过程通行能力增加了9.67%,而后500 m到1100 m并未呈现逐步增加的趋势,而是在7.6%~9.67%之间震荡。由此得到,衔接段长度从300 m到500 m是一个转折点,将衔接段长度从300 m增加到500 m能够较为有效地提高衔接段通行能力,当长度达到500 m后,增加衔接段的长度不能显著提高通行能力。
3.2 固定衔接段长度时,自动驾驶车辆比例和限速值对运营通行能力的影响
由上述分析可以得到在较高的自动驾驶车辆比例及较高限速值的情况下,衔接段长度对流量的影响较大,衔接段长度为500 m是衔接段通行能力的一个转折点,故选取衔接段长度为500 m,研究不同限速值及自动驾驶车辆比例对衔接段通行能力的影响,分别见表3—表5。

表3 主线限速值为80 km/h对交通流量变化的影响(Lc=500 m)

表4 主线限速值为100 km/h对交通流量变化的影响(Lc=500 m)

表5 主线限速值为120 km/h对交通流量变化的影响(Lc=500 m)
从表3—表5可以看出,在衔接段长度、主线限速值一定时,随着异质流中自动驾驶车辆比例的增加,衔接段的运营通行能力也逐步增加。在自动驾驶车辆比例为0~0.6时,对衔接段的运营通行能力提升较为有限,最大仅提升16.67%;随着自动驾驶车辆比例的逐步提升达到0.6以上时,通行能力增加幅度达到35.25%~94.60%不等。由此可以得到,当异质流中自动驾驶车辆比例高于0.6时,路段上有较多的自动驾驶车辆,越发容易形成CACC车队,以较稳定的状态跟车行驶,改善路段的交通状况,能够有效提高衔接段的运营通行能力,且随着自动驾驶车辆比例的增加,通行能力提高的幅度越大。
综合表3—表5可以看出,在衔接段长度一定,且有较高的自动驾驶车辆比例(0.6以上)的异质交通流环境中,随着主线限速值的提高,对衔接段的运营通行能力的提高程度越大。在主线限速值为80 km/h时,相比p=0时运营通行能力的提高程度最高为76.26%,当限速值达到100、120 km/h时,相比p=0时运营通行能力的提高程度最高可达92.52%和94.60%。在较高的道路主线限速的交通环境下,道路中的自动驾驶车辆能够更灵敏地感知交通状况,更加准确地执行跟车换道行为,相比于人工驾驶车辆,较高的自动驾驶车辆比例的异质流能在衔接段上保持较为稳定的高速跟车行驶,提高路段的通行能力。
综合表3—表5可以看出,随着主线限速值的提高,衔接路段上的车流密度总体上有不同程度的降低,衔接段最大车流密度由限速值80 km/h的33 veh/km降到限速值120 km/h的23 veh/km;在道路密度值较低的情况下,自动驾驶车辆比例的增加虽能够提高衔接段的通行能力,但并不一定能降低路段的平均车流密度,只有车流密度到达一定的水平(27 veh/km以上)时,自动驾驶车辆比例的增加才能够降低平均车流密度。
同时,从表3—表5的衔接段平均车速可以看到,在较低的自动驾驶车辆比例时(低于0.6),随着自动驾驶车辆比例的增加,虽然衔接段的通行能力有所提升,但是平均车速呈不升反降的趋势,这是由于人工驾驶的车辆中混入部分的自动驾驶车辆,会影响人工驾驶车辆在行驶过程中跟车及换道行为,同时较低的自动驾驶车辆也不易形成自动驾驶车队,不能较好地改善路段的通行情况;当自动驾驶车辆比例较高时(0.6以上),交通流中较多的自动驾驶车辆容易形成自动驾驶车队,减少对人工驾驶车辆的影响,能够提高路段整体运行速度,有效改善路段运行状况;当自动驾驶车辆比例达到1时,衔接段全部由自动驾驶车辆组成,均执行稳定的跟车行为,车流速度有明显提升,衔接段的通行能力会得到较大的提升。
4 结论
本文通过数值仿真,对异质交通流环境下高速公路隧道与互通立交衔接段交通流演化规律进行了研究。在较高的主线限速(120 km/h)及较高自动驾驶车辆比例(100%)的异质交通流情况下,衔接段长度500 m以上能够最大程度提高衔接段运营通行能力;当异质流中自动驾驶车辆比例达到0.6以上时,能够有效提高衔接段通行能力;对于较轻的交通拥堵,较高自动驾驶车辆比例能够在一定程度上缓解拥堵情况,提高通行能力。论文仅研究隧道与互通立交衔接段长度、限速值及自动驾驶车辆比例对衔接段运营通行能力的影响,且仅对部分条件下的交通情况进行了针对性分析。后续可进一步研究不同交通场景对衔接段交通安全的影响。
