高光谱图像的高维多目标压缩感知技术研究
2022-10-15张景波蔡星娟谢丽萍
张景波,蔡星娟,谢丽萍
(太原科技大学 计算机科学与技术学院,太原 030024)
E-mail:world4609@126.com
1 引 言
随着5G时代的来临,人们对数据的重视程度达到了前所未有的高度,数据量成指数形式上升,所以数据的传输和存储形式成为了一个亟待解决的问题.对于高光谱数据而言,不仅保存了被观测物体的空间维信息,还需要存储被观测物体的光谱维信息,高光谱数据往往包含几十甚至几百个波段的空间信息,并且不同物体的反射光谱差异通常较大;在表征物体结构特性方面,高光谱图像可以通过丰富的光谱信息辅助计算机视觉方面的应用,但这同时也导致其占用的存储空间很大,在传输过程当中对带宽的要求也更高,为了缓解传输和存储压力,近年来,针对高光谱图像的压缩感知理论被提出[1].传统的压缩感知理论采用观测矩阵对信号进行压缩,然后迭代逼近非线性优化问题的最优解来重构信号,克服了传统采样定理的缺陷,使得采样速率不需要达到模拟信号带宽的两倍,通过观测矩阵对原始信号进行稀疏采样,在保证原始信号能够恢复的情况下对数据进行压缩,减小了传输和存储过程中的计算开销[2,3].
特别在高光谱图像压缩感知中,图像的冗余信息较多,空间信息和光谱间信息的相关性较强,传统的压缩感知重构算法已不能满足高光谱图像重构的要求,为了保存重构所需要的重要数据,进一步提高高光谱图像的重构精度,文献[4]提出基于遗传算法的OMP重构方法,实现稀疏度的自适应性,对不同的数据的重构选取不同的稀疏度有效保证了重构的精确度;将高光谱图像转换为丰度矩阵和端元矩阵的乘积[5],采用两次压缩的方式,在端元个数未知的情况下估计端元矩阵,从而恢复高光谱图像也是常用的方式;在张量框架下的多维块稀疏(N-way block OMP,NBOMP)算法[6]可以利用高斯函数近似张量l0范数,进一步提高了重建精度;Fu等人[7]提出了一种基于上下文感知的压缩感知重构方法,采用在线字典学习和联合稀疏约束来结构化的表示光谱像素,并且引入加权平滑正则化项建立稀疏重建模型,很好的保留了高光谱图像的光谱空间结构;基于预测的方法对高光谱图像进行重构,首先将高光谱图像进行分组,并将组中的最佳图像作为参考图像,通过线性预测来近似组中的非参考图像并采用OMP算法进行图像的重建[8];王丽等人[9]将粒子群优化算法引入到OMP算法中,并且利用Hermitian求逆引理改进了OMP算法的残差更新迭代过程;Zhang等人[10]联合考虑高光谱图像的空间光谱维特性,提出了基于距离度量的联合核/TV范数最小化模型,利用空间光滑、空间稀疏、谱间相似性等,有效的提高了图像重建精度.高光谱图像的空间相似性和谱间相似性通常状况下是相关的,同一幅图像的中原子间的空间相似性越高,其谱间相似性也更好.
本文综合考虑了高光谱图像的空间维信息和光谱维信息,结合压缩感知中观测信号稀疏度与重构误差,建立高光谱图像的高维多目标模型;在求解模型时,针对优化算法在解决高维多目标问题时选择压力缺失,引入了基于参考点机制的非支配排序算法(NSGA-III)对OMP算法进行优化,提出了一种新的高维多目标重构算法(MO-OMP),指导重构问题解空间的搜索方式.实验结果证明所提出的算法在高光谱图像的压缩感知中具有较好的效果.
2 基本理论
2.1 压缩感知
稀疏变换基、观测矩阵和重构算法的研究是压缩感知理论的3个重要方面.首先进行信号的稀疏化处理,假设x∈Rn×1是一个n维的可稀疏化信号,在稀疏变换基Ψ下可以将信号x可变换为稀疏化信号,即:
x=Ψα
(1)
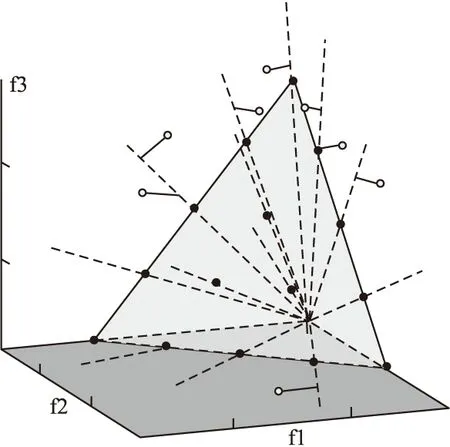
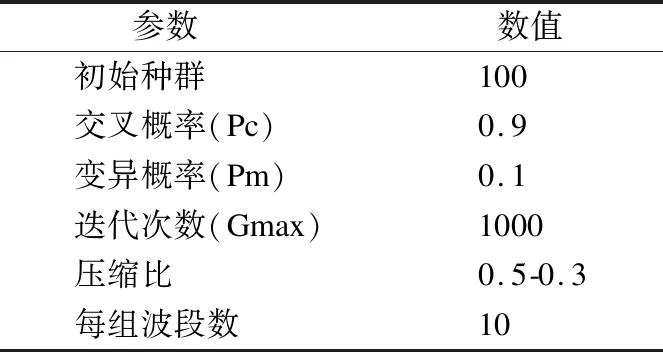
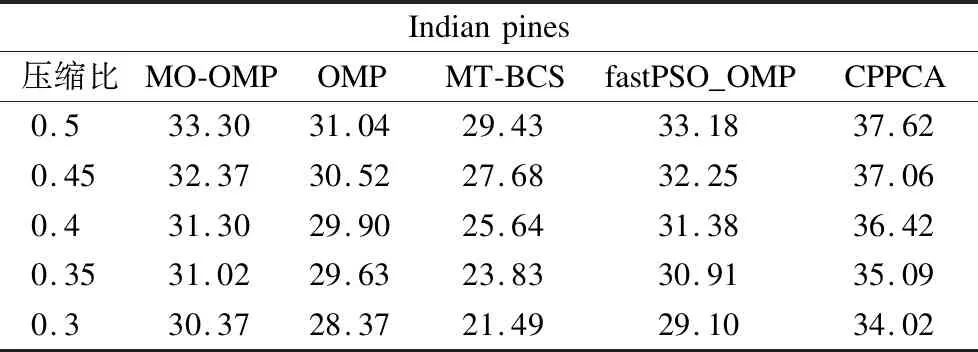
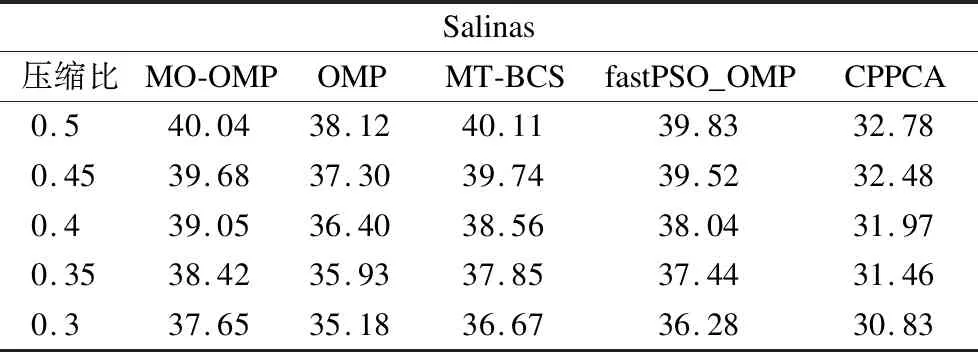
其中α∈Rn×1代表n维的可稀疏化信号x在变换基Ψ上的稀疏表示,这里的稀疏指的是α∈Rn×1中只有k(k y=ΦΨα=Acsα (2) 其中Acs表示α的传感矩阵,显然y中包含了信号x重构所需要的重要信息.在数据传输和存储的时候,只对压缩后的信号y进行传输或存储,因为y的维数远小于x的维数,所以在传输的时候,减小了数据的传输量,且在数据维数过高的时候可以大大减小数据传输的消耗;同理,在数据恢复的时候,实际上就是通过压缩后的信号y和传感矩阵Acs求稀疏信号s的过程. (3) 但是由于观测信号y的维度远小于稀疏信号α的维度,导致信号重建时公式(3)变为了一个NP-Hard问题,因此可以将l0范数转化为l1范数进行求解: (4) 在信号和噪声都是未知的情况下,可以将问题转化为l1范数的正则化问题来求解: (5) 其中σ为正则化参数.现有的大多数优化算法都是基于正则化框架的,用来恢复具有K个稀疏非零分量的稀疏解(K稀疏解).实际上,我们同样可以将稀疏优化问题看作高维多目标优化问题,针对实际情况,对稀疏优化问题加以约束. OMP算法[11]是一种基于局部搜索策略的贪婪算法,具有算法复杂度小,计算时间快的特点.在压缩感知的重构中,该算法首先计算出观测矩阵Φ与投影残差r之间相关系数最大的原子更新支撑集,然后对观测矩阵Φ做Schmidt正交化,排除选取的原子对后续原子的干扰,最后对残差进行最小二乘更新,直到迭代到满足终止条件停止并获得重构信号. OMP算法伪代码如下: 算法1.OMP 开始 输入:原始信号y,观测矩阵Φ,稀疏度K,重构信号中非零元素位置的原子指标集Λ,迭代次数k. 初始化:r=y,k=0,Λ0为空集; while k k=k+1; 1.找出r中与观测矩阵Φ中最匹配原子(列向量)的索引λk=argmax{|〈rk,φk〉|}; 2.更新原子指标集Λk; 3.更新观测矩阵列集合Φk; 5.更新残差r=y-Φkx; end end 输出:重构信号x 结束 在对实际问题的优化过程中,对同一个问题的求解过程通常会有存在互相冲突的关系的不同的约束,此时可以利用元启发式算法对这些相互冲突的问题进行优化求解.常见的多目标优化算法有NSGA-II和MOEA/D等,在3个或3个以下目标的优化问题的解决中表现出了强大的搜索能力,多目标优化的最优解为一组折衷解,将其称为pareto最优解,不存在单一的最优解,所以在目标数多于3个时,传统的多目标优化算法会缺失选择压力,导致无法逼近最优解,此时,采用高维多目标优化算法是一种更为有效的措施[14],如NSGA-III.一个高维多目标优化问题可以定义为: (6) 其中x=(x1,x2,…,xn)T表示在决策空间Ω中的n维决策变量向量,f:Ω→Θ⊆Rm代表目标向量,由m个目标组成,通过公式(6)可以将n维决策空间Ω映射到m维的目标空间Θ中.当目标个数m是两个或3个时,该问题称为多目标优化问题,当目标个数m大于3个时,将问题称为高维多目标优化问题.针对高光谱图像的空谱相关性,我们提出了4个目标来进行联合优化,优化问题定义为: (7) 下面分别介绍所提得4个目标. f1表示损失函数: (8) 其中Acsα表示重构信号的测量值,Y表示原观测信号,f1越小则表示重构效果越好,对残差求平方,Acsα-Y转化为正数,并且较大的误差对f1值的影响更大,而较小误差不会对目标值产生大的影响,在模型的迭代中会,增加了模型的拟合效果,使迭代值可以更加逼近真实值. f2表示图像稀疏性的惩罚项,代表恢复信号中非零项的个数,定义为: f2=‖α‖0 (9) 信号的可稀疏性是压缩感知的基础,在OMP算法中,原子指标集的选择可以看作是确定信号非零位置的问题,信号恢复的精度与其非零位置的选取又有着直接的关系,f2可以对信号中非零元素的个数进行约束,所以观测信号的稀疏度和测量误差是两个互相冲突的目标,观测信号中的非零项越多,其测量误差往往越大,所以如何折衷选取稀疏度和测量误差是一个待解决的优化问题. 高光谱图像包含了样本的空间信息和光谱信息,其在空间维上具有非常多的局部相似性,同时其光谱信息和空间信息不是相互独立的,在空间上相似的像素,通常情况下也会呈现出相似的光谱,所以本文将高光谱图像的光谱相似性和空间相似性作为目标来指导重构问题解空间的搜索方向,空谱相似性也会对图像的恢复产生正向的影响,空谱相似性越高,其测量误差往往越小,本文将高光谱图像的空间相似性定义为: (10) 其中f(x,y)表示单波段内的位置(x,y)的像素值,l和k是指定常数,表示为步长,在实际计算中,本文分两步进行,第1步固定l不变,调整k值,为每一行向量计算与其它行向量的内积值;第2步,固定k值不变,调整l值,为每一列计算与其它列向量的内积值.本文将该内积值称为原子间相关性,每一个行向量与列向量都对应一组原子间相关性,在算法2中将该组原子相关性作为优化目标指导解空间中最优解的选择.原始数据中行列间相似性越好,重构精度越高,这里我们采用来度量不同向量之间的相似性结构而非传统的欧几里德距离,可以有效提高解空间中的选择压力,提高解的精确度. 高光谱图像的谱间相似性定义为: f4=∬(f(x,y)-μf)(g(x,y)-μg)dxdy (11) 包含上百个波段的高光谱图像数据集,其光谱间信息连续性较高,f4表示高光谱图像的谱间相似性,代表了每个波段图像相同空间位置的相互依赖程度.高光谱图像各波段之间的空间结构相同,但是其光谱信息是由被观测物体在不同光谱段的反射能量形成的,光谱信息的分辨率可以表示谱间相似性的大小.引入互相关函数作为谱间相似性的表示函数,其中μf和μg表示不同波段灰度图像的平均值,将公式(11)离散化后可表示为: (12) 公式(12)中fi和fj分别表示光谱带i和j的图像.在实际计算中为每一波段的光谱图像计算一组谱间相似性,作为优化算法中的目标指导解空间最优解的选择. 因此,本文的高维多目标模型如式(13)所示: F=[f1,f2,f3,f4] (13) OMP算法虽然具有迭代次数少,重构时间短等特点,但是由于其每次迭代过程仅仅选取一个原子来更新原子指标集,导致重构精度不高,特别是在针对高光谱图像压缩感知时,由于高光谱图像本身具有很强的空谱相关性,并且高光谱图像波段数多,数据量大,信息冗余度高,在压缩重构时,很容易出现维数灾难,导致最后的重构精度下降,单纯的OMP算法已经不在适用. 算法首先对压缩后的观测信号Y进行简单的波段分组,其目的是在重构时在每一组波段中进行重构,避免波段数过多导致重构精度下降的问题.波段选择采用标准遗传算法进行组合优化,随机生成初始种群,种群大小设置为100,以第3节所提出的公式(11)作为目标函数,相邻波段之间计算谱间相似性,交叉算子和遗传算子采用3.5节所提的算子,迭代次数设置为1000代,优化得到谱间相似性最优的一组解,接着按照每10个波段为一组,将所有波段平均划分,如果无法平均划分,则将多余出的波段补足到最后一组.除此之外,波段分组还有许多因素需要综合考虑,但对本文所研究的问题影响并不大,所以这里对波段进行了简单的选择. NSGA-Ⅲ算法主要用来求解最优原子指标集的位置,本文将OMP算法中通过最小二乘法求得的原子指标集作为初始种群的一半,另一半在定义域[1,N](N为信号长度,即高光谱图像的单波段图像维度)中随机生成K(K为压缩后的信号长度)维不重复向量作为个体.在生成子代种群的过程中,对每个个体进行快速非支配排序、参考点选择、关联操作、交叉和变异等操作,选择适合高光谱图像压缩的原子指标集,使得算法在更易跳出局部最优解的同时有效提高算法重构精度.本文建立了重构过程的高维多目标模型,并设计基于NSGA-Ⅲ算法优化的OMP重构算法,对压缩感知重构的原子匹配过程进行重新求解,提高了OMP算法跳出局部最优解的能力. 图1 参考点选择示意图Fig.1 Reference point selection 图2 关联操作示意图Fig.2 Association operation 对Pt+1中的个体进行交叉和变异,使父代的优良基因遗传给子代与保持种群多样性,同时又使得算法具有跳出局部最优解的能力.本文算法中采用二进制编码多点交叉,对种群中所有个体设定交叉概率和变异概率并将其作为全局变量,本文中交叉概率设定为0.9,变异概率设定为0.1;在个体编码串中随机设置多个交叉点进行交换,如图3所示. 图3 交叉操作示意图Fig.3 Cross operation 通过变异概率选择进行变异的个体,接着在需要进行变异的个体中随机选择变异位变异.本文算法中采用二进制变异算子进行操作,将个体用二进制字符表示之后,对随机选中的变异位置取反,如图4所示. 图4 变异操作示意图Fig.4 Variation operation 将最终生成的子代种群作为新的父代种群,不断进行迭代指导满足迭代条件为止,迭代停止时的解被认为是解空间中满足各目标约束的最优解. 算法伪代码如下: 算法2.MO-OMP 开始 输入:高光谱图像数据集(X),传感矩阵Acs,交叉算子(Pc),变异算子(Pm),最大迭代次数(Gmax),压缩比(rate),稀疏度(K). 过程:1.参数设置,如表1所示; 2.对高光谱数据集X进行压缩观测得到观测信号Y; 3.对Y进行波段选择分组; fori=1∶M(M为重构图像的最大列数) 4.y=Y(:,i)表示提取Y中的列向量; 5.找出r中与观测矩阵Φ中最匹配原子(列向量)的索引λk=argmax{|〈rk,φk〉|}; 6.生成初始种群Pt,Pt个体一半使用先验信息λk生成,另一半在定义区间内随机生成,定义区间为[1,N],N为信号长度; While 迭代次数 < Gmax do 7.对组内的高光谱图像计算高维多目标模型的四个适应值(F1,F2,F3,F4) 8.快速非支配排序; 9.参考点选择; 10.关联参考点; 11.交叉(Pc)变异(Pm); 12.选择精英个体进入下一代; end 13.输出最优个体位置; 14.更新原子指标集Λk 15.更新观测矩阵列集合Φk; 17.X(:,i)=x; end 输出:重构后的高光谱图像X 结束 重构算法的计算复杂度是衡量算法效率的一个重要指标,本文所提算法在OMP算法中结合了NSGA-Ⅲ指导解空间的收敛,不可避免的会增加一定的算法计算时间,但总体在可以接受的范围内,具体的时间复杂度分析如下:假设高光谱数据集中单波段图像大小为M×N,并且其中每一列采用最小二乘法计算得到优化算法初始种群的一半个体值,所以该部分的时间复杂度约为O(MNlogN).在优化过程对M维决策变量的2N个个体进行非支配排序,所需的时间复杂度为O(NlogM-2N),在算法中参考点选择策略的时间复杂度为O(MN),进行参考点关联时的时间复杂度为O(MN),交叉和变异操作在每一代中都进行,但是其计算复杂度较小,约为O(N),综上所述,在所提算法MO-OMP中算法的计算复杂度约为O(MN2logM-2N).在实验部分,本文将进一步对比算法的实际计算时间以表示所提算法的计算效率. 本文的实验数据集为高光谱图像数据集Indian pines,Pavia University和Salinas.Indian pines数据集由AVIRS传感器在印第安纳州西北部的印度松树测试场上收集,场景共包含16类地物,尺寸为145×145像素,有224个光谱反射带,波长范围为0.4-2.5×103μm,除去噪声和水汽波段,其可用波段为200个;Pavia University是ROSIS传感器在意大利的帕维亚城所成像的部分高光谱数据,场景共包含9类地物,尺寸为610×340像素,共有115个光谱反射带,波长范围为0.43-0.86μm,除去水汽和噪声波段,可用波段为103个;Salinas由AVIRS传感器在美国加利福尼亚州的Salinas山谷所收集,场景中共包含16类地物,尺寸为512×217像素,共有224个光谱反射带,除去水汽和噪声波段后可用波段为204个. 实验环境:本文所有实验均在windows10环境下Matlab2018a版本上进行,设置了3组实验,所涉及到的参数如表1所示. 表1 参数设置Table 1 Parameter settings 为了评价高光谱图像压缩感知的重构精度,我们采用了图像评价中常用的两种评价指标,峰值信噪比(PSNR),计算公式如下: (14) (15) 其中MSE表示均方误差,μ表示图片内像素的均值,σ表示像素的标准差. 本文实验采用傅里叶变换基对高光谱图像进行稀疏变换,并采用随机高斯矩阵对高光谱图像进行观测,其余参数设置如表1所示,本节对所提出的算法进行性能评估,分别选取Indian pines,Pavia University和Salinas这3组数据集使用4种算法进行重构,对比算法包括MO-OMP、fastPSO_OMP[4]、OMP[10]、MT-BCS[15]、CPPCA[16]验结果如下. 表2-表4中的数据为所有波段重构精度的平均数据,从5种重构算法可以看出本文所提MO-OMP算法与正交匹配追踪算法(OMP)相比,在相同压缩比的条件下,MO-OMP算法的整体的重构精度更高,并且在压缩采样率下降的过程中,图像的重构质量不会急速下降,鲁棒性更强. 表2 Indian pines在不同压缩比下的重构精度Table 2 PSNR in Indian pines 表3 Pavia University在不同压缩比下的重构精度Table 3 PSNR in Pavia University 表4 Salinas在不同压缩比下的重构精度Table 4 PSNR in Salinas 与高光谱图像压缩感知算法fastPSO_OMP相比,由于本文算法在优化目标中将高光谱图像的空间结构和谱间结构联合考虑,使得重构精度得到了提升,特别是在采样率低的条件下,MO-OMP算法表现出了更好的性能;与MT-BCS算法相比,本文所提算法的重构精度在数据集Indian pines和Salinas上整体优于MT-BCS,在Pavia University上,压缩比为0.5时,MO-OMP算法的重构精度略差于MT-BCS,但是在压缩比为0.4时,本文所提算法的重构精度高于MT-BCS算法,也进一步证明了MO-OMP算法在低采样率下具有更好的表现. 与CPPCA算法相比,本文所提算法在数据集Indian pines上的表现不如CPPCA,但是在数据集Pavia University和Salinas上的整体性能却高于CPPCA算法,这是由于重构算法对数据集的依赖程度比较高,空间维数大的数据集,其中包含的数据信息更多,相对于维数小的数据,重构算法在随机优化时选取的原子非零指标集位置误差就会更大.在压缩比逐渐减小的过程中,维数大的数据集波动的幅度也更大.3组数据集上的重构精度变化如图5所示. 图5 重构精度变化趋势图Fig.5 Comparison of PSNR change trend 为了进一步验证本文所提算法的实用性,本文对MO-OMP算法和对比算法的计算时间进行了实验对比,对比结果如表5所示. 表5 算法的运行时间比较Table 5 Comparison of runtime(s)for the various algorithms 通过对比可以发现,本文所提算法在实际应用中的算法运行时间处于中等,虽然相较于一些应用加速策略的高光谱图像重构算法的运行时间要长,但是相较与OMP算法的运行时间大大减少,并且MO-OMP算法的运行时间在实际应用中增加的运行时间平均在12.20s左右,在可以接受的范围之内. 本文针对高光谱图像压缩感知的重构问题中空谱结构无法被有效考虑的问题,建立高光谱图像的高维多目标模型,并且提出了提出新的算法来解决重构问题,实验结果表明所提算法在高光谱图像压缩感知的问题下有良好的效果,相比于传统的高光谱图像压缩感知模型,高维多目标压缩感知模型在高光谱图像的重建问题上更具鲁棒性.在未来的工作中,我们将针对重构算法在不同高光谱数据集上的重构效果优劣不同的问题,对重构算法进行自适应设计以应对不同高光谱图像数据的特点.2.2 OMP算法和NSGA-III算法
3 高维多目标模型
4 改进的MO-OMP算法
4.1 快速非支配排序

4.2 参考点选择策略

4.3 关联操作

4.4 交叉和变异


4.5 算法执行过程
4.6 算法时间复杂度分析
5 实验结果与分析
5.1 实验数据
5.2 参数设置
5.3 评价指标
5.4 实验分析



6 结 论
