基于无迹卡尔曼滤波的井筒压力实时校正模型*
2022-10-13夏顺雷柳贡慧杨宏伟李文拓
夏顺雷 李 军,2 柳贡慧 杨宏伟 罗 鸣 李文拓
(1.中国石油大学(北京)石油工程学院 2.中国石油大学(北京)克拉玛依校区石油学院 3.中海石油(中国)有限公司湛江分公司)
0 引 言
目前井筒压力预测多为通过建立模型模拟计算获得[1-6],模拟计算井筒摩阻压降的计算至关重要。为了准确地计算摩阻压降,在模型建立时考虑要全面,在模型计算时输入参数要能准确描述井下工况。已有学者针对不同的井筒摩阻压降影响因素建立了多种井筒压力预测模型,如O.ERGE等[7]建立了考虑钻柱旋转、偏心和屈曲井筒压力预测模型,李军等[8]研究了椭圆井眼中的井筒压力计算模型,岳湘安等[9]建立了考虑岩屑的井筒流动模型。上述模型虽然在建模过程中考虑了不同的影响因素,但是无法确保模型计算过程中的相关参数能够准确描述井下工况,导致预测结果与实际井筒压力仍可能有较大误差。此外,由于上述模型考虑因素多,实际计算过程中需要占用大量时间和空间,求解效率不高。
随着随钻井下数据传输技术的发展,井底压力、温度和钻压等井下数据能够及时传输到井口[10-14],使得根据井下数据实时调整井筒压力成为可能。在钻井过程中,井筒流动是复杂的动态系统。对井筒压力预测模型的相关参数值进行实时校正,会显著提高模型对系统描述的准确性。目前,可以校正模型参数的方法有很多,如卡尔曼滤波技术和最小二乘法[15]。最小二乘法需要在不断地存储测量值的同时处理数据,适合事后分析。卡尔曼滤波参数可以实时调整,且不需要存储大量的测量值,计算过程相对高效,适合井筒压力预测模型的实时校正。然而,卡尔曼滤波算法最初是为线性模型开发的,无法处理非线性的井筒模型。近年来,一种适用于强非线性模型的滤波算法被开发出来,即无迹卡尔曼滤波(Unscented Kalman Filter,UKF)算法。无迹卡尔曼滤波是无迹变换(Unscented Transform,UT)与标准卡尔曼滤波的结合,通过无迹变换使标准卡尔曼体系适用于非线性模型。UKF算法提出后,已经有多位学者将其成功运用于井下工况判定、井筒流量校正和旋转导向等方面,并取得了良好的效果[16-19]。但是,目前鲜有学者研究UKF算法在井筒压力校正中的应用。
因此,笔者通过将UKF算法与井筒内压力计算模型相结合,建立了一种新的井筒压力实时校正模型。分别使用自设数据和实测数据对模型进行仿真验证,结果显示该模型能够对井筒压力进行实时校正,且计算结果具有较高的精度。
1 井筒压力计算模型
建立校正模型的重点在于UKF算法与井筒压力计算模型的结合。为此,在井筒压力计算模型的建立过程中需做以下假设:
(1)井眼垂直,不考虑井斜和方位角变化;
(2)钻井液流体在井筒内为一维轴向流动;
(3)井筒内流动为单相流动;
(4)不考虑轴向传热。
钻井作业中,任意一点井筒压力由井口回压、静液柱压力和摩阻压降3部分组成。其中,井口回压可以由压力表直接测量,静液柱压力和摩阻压降需要通过相关模型计算得到,其计算模型为:

(1)
式中:p为井筒压力,Pa;T为井筒温度,℃;h为井深,m;ρL(p,T)为当前温度压力条件下钻井液密度,kg/m3;g为重力加速度,m/s2;pc为井口回压,Pa;dpf为摩阻压降梯度,Pa/m。

ρL(p,T)=ρ0exp[4.331 7×10-10(p-p0)-
1.999 9×10-18(p-p0)2×
4.733 8×10-4(T-T0)-
1.378 3×10-6(T-T0)2]
(2)
式中:ρ0为地面温度压力条件下钻井液密度,kg/m3;p0为地面压力,MPa;T0为地面温度,℃。
由式(2)可以看出,想要计算不同井深处钻井液密度,需要得到井筒温度。钻井过程中,井筒与地层构成了一个复杂的热交换系统。基于热力学第一定律,可以获得地层和井筒传热模型:
(3)
式中:qm为质量流量,kg/s;Cp为钻井液比热容,J/(kg·℃);λ为传热系数,W/(m·℃);r为距井眼轴线距离,m;z为井眼轴向距离,m;S为热源项,J;t为钻井液循环时间,s。
对于钻井液流动产生的摩阻压降梯度,采用式(4)[22]计算:
(4)
式中:Dhy为水力半径,m;f为范宁摩阻系数,无量纲;v为钻井液流速,m/s。
上述模型为钻井液密度、井筒温度、井筒压力三者耦合的井筒压力模型。使用有限差分法对模型进行求解,在每个时间步中,首先求解井筒温度,再通过钻井液密度随温度、压力的变化模型求解井筒压力。模型的具体离散过程和求解方法可以参考文献[23]。
2 井筒压力反演校正算法与建模
准确计算摩阻压降能够显著提高井筒压力计算精度。然而,影响摩阻压降的因素较多,想要获得较高精度的摩阻压降十分困难。而且由于环空内井径变化、钻柱旋转与偏心以及井壁摩阻系数的变化等不确定因素较多,进一步增加了环空摩阻压降计算难度[24]。为提高井筒环空摩阻压降计算精度,本文在摩阻压降计算模型中引入摩阻校正因子C,计算公式如式(5)。摩阻校正因子可由UKF反演算法求解。
(5)
2.1 UKF反演算法
所谓反演,就是利用状态量和观测量的函数关系,以观测量为已知参数,在一定估计准则条件下,得到所需状态量的最优估计值。因此参数的反演本质上是最优化估计方法的一种应用[25]。卡尔曼滤波是最优化估计领域的一个里程碑式的研究成果,被广泛应用于线性系统中。为了将卡尔曼滤波理论应用于非线性系统,Julier等[26]通过在卡尔曼滤波技术中引入无迹变换算法,将非线性系统中参数值的非线性传递转化为线性传递,开发出无迹卡尔曼滤波技术。
2.2 反演校正模型的建立
将摩阻系数作为状态量,使用UKF反演算法求解式(5)时,还需一个对摩阻校正系数有影响的控制体边界附近或边界处的观测量,如PWD测量值。可确定UKF反演计算的状态量和观测量分别为:
状态量:
xk=C(k)
(6)
观测量:
zk=pw(k)
(7)
式中:x、z分别为状态量和观测量符号;k表示k时刻,无量纲;C(k)为k时刻摩阻系数,无量纲;pw(k)为k时刻井底测量压力,Pa。
对于井筒压力反演校正模型,在状态量和观测量确定后,与之对应状态方程和观测方程如下:
状态方程:
xk=xk-1+uk-1
(8)
观测方程:

(9)
式中:uk为系统噪声,协方差为Q;vk为测量噪声,协方差为R。
无迹卡尔曼滤波过程主要包含2个步骤(循环步):状态更新(预测步)和测量更新(校正步)。本文针对式(8)和式(9)描述的非线性系统,利用UKF算法反演校正井筒压力的一个循环步。在计算过程中需要给定摩阻校正系数的初始值,即状态量的初始值x0。初始值的选取对初始校正结果影响较大,随着校正次数增加,初始值对校正结果的影响将迅速减小。UKF反演计算的一个循环步如下:
(1)求初始时刻状态量x0的统计值:
(10)

(2)对于k-1(k∈N*)时刻,利用UT变换,计算一组Sigma点及对应权重:
Sigma点:
(11)
(12)
权重:
(13)

(3)状态预测:由k-1时刻的Sigma点集和状态方程预测k时刻状态量的Sigma点集,并计算加权均值和协方差。
xi,k∣k-1=xi,k-1+uk-1i=0,1,2
(14)
(15)
(16)
(4)测量更新:由k时刻状态量的Sigma点集和观测方程计算k时刻观测量的Sigma点集,并计算加权均值和协方差。
ρL(p,T)v2dh+vki=0,1,2
(17)
(18)
(19)
(20)
(5)计算卡尔曼增益矩阵:
(21)
(6)状态量和协方差更新:
(22)
(23)

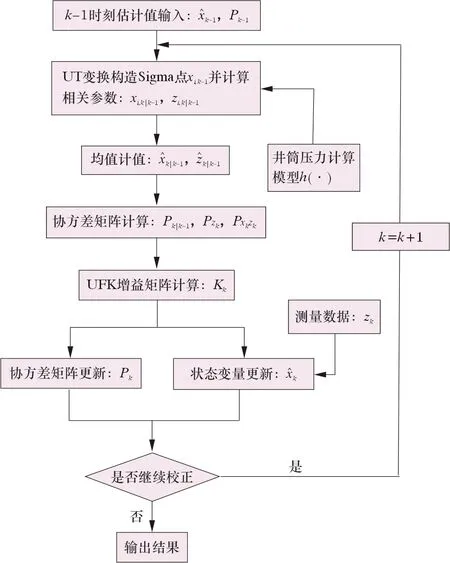
图1 井筒压力校正流程图Fig.1 Flow chart of wellbore pressure correction
3 算例分析
为分析并验证模型对井筒压力的校正效果,本文给出2个计算实例。其中算例1使用了合成的井底压力数据,用于分析反演算法的可行性;算例2使用了来自某高温高压井井底PWD实测数据,用于验证模型实际校正效果。
本文重点为UKF和水力学模型的反演计算,因此并未对UKF参数做特殊的优化。算例中UKF三个相关参数设置为:α=0.1,β=2,κ=2。此外,模拟计算过程中系统噪声和测量噪声标准差分别设置为0.05和0.000 2,对应反演模型中系统噪声和测量噪声协方差矩阵分别为Q=0.052,R=0.000 22。
3.1 模拟井计算
模拟井井身结构参数和部分钻井参数如图2所示。为验证井筒压力反演校正算法对井下复杂工况的适应性,设定2 000~3 000 m井段为缩径段,摩阻校正系数变大;4 000~6 000 m井段为扩径段,摩阻校正系数减小;其他井段摩阻校正系数随井深增加而增加。模拟井摩阻校正系数随井深的变化见图3。将摩阻系数设定值带入式(5)和式(9),可得到钻进过程中的井底压力数据,即观测量。此外,在模拟过程中,为避免离散后的井筒温压模型维度过大,确定离散后的网格长度为5 m。因此,反演计算过程中,井深每延伸5 m,对摩阻系数进行一次反演计算。

图2 模拟井井身结构参数和钻进参数Fig.2 Hole structure and drilling parameters of simulated well

图3 井筒摩阻校正系数设定值Fig.3 Set value of wellbore friction correction coefficient
图4展示了摩阻校正系数反演值与设定值随井深的变化。由图4可知,初始校正时刻,即1 500 m处,反演计算得到的摩阻校正系数波动剧烈,且与设定值差别较大。随着井深的不断延伸,反演次数逐渐增加,模型计算得到的摩阻校正因子波动减缓,且逐渐靠近设定值。图5展示了反演计算相对误差随井深的变化。由图5可以看出,1 500~2 000 m反演校正初始井段,模型计算结果相对误差较大;2 000 m后,模型计算结果相对误差逐渐减小,最终稳定在0.02%以内。

图4 反演计算结果Fig.4 Inversion calculation results
此外,由图4和5可以看出,在扩径段和缩径段,尤其是2 500 m和5 000 m摩阻校正系数设定值突然变化处,摩阻校正系数反演值相对误差变大。这是由于在扩径段和缩径段摩阻校正系数的设定值变化较快,导致反演计算得到结果精度下降。虽然反演计算得到的摩阻校正系数在扩径段和缩径段精度有所下降,但是仍较接近摩阻校正系数设定值,误差不超过0.02%。
图6展示了不同井深处环空摩阻压降。由图6可以看出:随着井深增加,环空摩阻压降不断增大;摩阻压降未校正值越来越偏离真实值,井底偏差最大,约为2.6 MPa。校正后的摩阻压降值虽在校正初始阶段有一定程度的波动,但始终与真实值十分接近。图7展示了不同井深处井底压力值。由图7可以看出,随着井深不断增加,未校正的井底压力值逐渐偏离真实值,而校正后的井底压力值始终与真实值接近。

图6 不同井深处环空摩阻压降Fig.6 Annulus friction pressure drop with different well depth

图7 不同井深处井底压力Fig.7 Bottom hole pressure with different well depth
通过模拟井相关计算,由图6、图7可以看出,建立的基于UKF算法的井筒压力反演校正模型不仅能够较准确的计算出井下摩阻校正系数,而且能够根据井下情况实时调整计算结果。将反演得到的摩阻校正系数带入井筒压力计算模型,可以提高井底压力预测精度。
3.2 实例井计算与验证
本算例数据来自某油田钻井实例。数据包含四开钻井过程中4 190~4 512 m段井底压力和排量数据。井深每延伸1 m,相关数据被更新记录一次,见图8和图9。该井三开套管外径244.50 mm,壁厚11.99 mm,套管鞋深4 172 m,顶深0。四开采用的钻井液密度为2.35 g/cm3,PWD测点距离井底4.25 m。钻头和钻杆数据:钻头直径215.90 mm;钻杆外径127.00 mm,内径88.26 mm。

图8 4 190~4 512 m实测井底压力图Fig.8 Measured bottom hole pressure at 4 190~4 512 m

图9 4 190~4 512泵排量Fig.9 Pump displacement at 4 190~4 512 m
设置模拟计算网格长度为1 m,井深每延伸1 m进行一次反演计算。摩阻校正系数初始值设定为1.2,反演结果如图10~图13所示。由图10和图11可以看出:在反演计算初始阶段,随着反演次数增加,摩阻校正系数线性增大,校正后PWD处压力快速向实测数据靠拢;当井深超过4 400 m,即反演次数超过200次后,摩阻校正系数稳定在9.0左右,校正后PWD处压力值比较接近PWD实测压力数据;未校正的PWD处压力与PWD实测压力差别较大。由图11可以看出:本文建立井筒压力反演校正模型还能校正PWD无法直接测量的井底压力。由图12可以看出:未校正PWD处压力相对误差超过4%;校正后PWD处压力相对误差随着反演次数的增加逐渐减小,在摩阻校正系数稳定后相对误差小于1%。图13为井深4 500 m时裸眼段井筒压力剖面。由图13可以看出,利用摩阻校正系数计算得到的井筒压力剖面更加接近PWD实测压力。

图10 摩阻校正系数计算结果Fig.10 Calculation results of friction correction coefficient

图11 井底压力计算结果Fig.11 Calculation results of bottom hole pressure

图12 PWD处计算误差Fig.12 Calculation error at PWD

图13 4 500 m时井筒压力剖面Fig.13 Wellbore pressure profile at 4 500 m
为进一步体现摩阻校正系数在井筒压力预测中的作用,将计算得到的摩阻校正系数带入井筒压力计算模型,用于预测变排量测试过程中井筒压力。变排量测试现场实测数据见表1,计算结果见图14。由图14可以看出:未校正的PWD处压力值与PWD实测值相差3 MPa左右,而利用摩阻校正系数计算得到的PWD处压力与真实值相差小于0.5 MPa,显著提高了井筒压力预测精度。

表1 变排量实测数据Table 1 Measured data in variable pump displacement test

图14 变排量过程中井筒压力Fig.14 Wellbore pressure in variable pump displacement test
综上,在实际钻井过程中,通过UKF反演模型能够实时反演得到不同井深处摩阻校正系数,利用摩阻校正系数,能够较准确地预测钻井过程中井筒任意点的压力和任意时刻的井筒压力剖面,弥补井下测量工具只能进行单点测量的不足。校正后的井筒压力精度受校正次数影响较大。本文模拟计算条件下,当反演校正次数超过200次后,反演得到的摩阻校正系数趋于稳定,计算结果相对误差小于1%。
4 结 论
本文将无迹卡尔曼反演算法引入到井筒压力预测模型中,建立了基于无迹卡尔曼滤波的井筒压力的实时校正模型。通过模拟井和实例井对模型进行分析、验证,该模型具有以下特点:
(1)使用基于UKF的井筒压力反演校正模型不仅能够计算出井下摩阻校正系数,而且能够根据井下情况实时调整计算结果。
(2)利用反演得到的摩阻校正系数不仅能够提高井底压力预测精度,还能够较准确地预测钻井过程中井筒任意点的压力值和任意时刻的井筒压力剖面,从而弥补井下测量工具只能进行单点测量的不足。
(3)校正后的井筒压力精度受校正次数影响较大。在本文实例井模拟计算条件下,当反演计算次数超过200次后,反演得到的摩阻校正系数趋于稳定,计算结果相对误差小于1%。
