基于改进滑模控制的光伏并网逆变器 控制策略
2022-10-10米俊毅赵兴勇
米俊毅,赵兴勇
(山西大学 电力与建筑学院,山西 太原 030006)
0 引言
近年来,为了解决化石能源带来的环境恶化问题,充分利用可再生能源已成为国内外共识;以太阳能、风能为代表的可再生能源并网发电已经成为新型电力系统的发展趋势[1,2]。
随着光伏发电效率的提高、并网容量的增大,光伏逆变器的控制性能对于电网电能质量的影响愈加显著,其控制策略的研究对于新型电力系统的发展具有重要意义[3,4]。
采用传统的逆变器控制方法,如恒压恒频控制[5]、恒功率控制[6]、下垂控制[7]等线性控制方式[8-10],虽能实现对逆变器的良好控制,但其对外界干扰的抑制效果较差,鲁棒性能不足。
为了解决上述问题,多种非线性控制方法被应用于逆变器控制中。文献[11]考虑了逆变器不确定参数和电网干扰,设计了一种电流环H∞鲁棒控制器,但并未考虑电压外环的控制性能以及直流侧电压的稳定性。文献[12]将鲁棒H∞控制技术和自抗扰控制相结合,提出了一种基于电网电压定向的鲁棒双环控制策略,实现了对外界干扰所造成跟踪误差的有效抑制;但是,其控制器参数设计较为复杂,且严重依赖系统模型的精确性。文献[13]将反步法与PI控制器结合,设计了一种非线性控制器,实现了电网与光伏发电系统间的功率平衡,但未考虑到电网电压波动等外界干扰的影响。
光伏并网逆变器本身是周期性变结构系统。滑模控制策略(sliding mode control,SMC)因其具有很强的鲁棒性,所以适用于光伏并网逆变器的控制[14]。文献[15]设计了一种适用于中性点箝位型三电平逆变器的电流环滑模控制器,但其电压环仍采用PI控制,抗扰动能力有限。文献[16]根据有功无功误差最小原则进行控制量的修正,提出一种离散滑模直接功率控制策略,但未考虑控制过程中的“抖振”现象。文献[17]将滑模控制与自适应观测器结合,通过调整系统切换函数的系数以削弱抖振,但是没有详细说明用于在线调整符号函数系统的自适应观测器。
综上分析,针对光伏并网逆变器存在直流侧和网侧不确定干扰的问题,本文提出一种双闭环滑模控制策略:电压外环采用积分滑模控制,以在稳定直流侧电压的同时减少系统稳态误差;提出一种新型的趋近律用于电流内环滑模控制器,以在不牺牲系统响应速度的同时,尽可能地削弱系统抖振。
1 光伏并网逆变器模型
文中采用的光伏并网逆变器拓扑结构如图1所示。

图1 光伏并网逆变器拓扑结构图 Fig. 1 Topology structure of photovoltaic grid connected inverter
图1中:us表示电网相电压;i表示逆变器交流侧相电流;L和R分别表示逆变器交流侧滤波电感的等效电感和内阻;C和Udc分别表示逆变器直流侧电容和电压。
为了简化控制策略的设计,使用dq旋转坐标系下的光伏并网逆变器数学模型[18]:

式中:Ud=UdcSd,Uq=UdcSq;Sd、Sq分别为开关函数的d、q轴分量;usd、usq分别为电网电压在d、q轴上的分量;id、iq分别为逆变器交流侧电流在d、q轴上的分量;iL为流入逆变器的电流。
2 滑模控制器设计
滑模控制器的设计包括3个部分。
(1)设计滑模面:使系统运动点在滑模面上保持良好的动态特性。
(2)设计趋近律:决定了系统运动点趋向滑模面过程中的动态特性及逼近切换面时的抖振程度。
(3)设计控制率:满足滑模控制器的控制目标,使系统能从任意初始状态在有限时间内到达滑模面。
为实现并网控制目标,本文采用如图2所示双闭环滑模控制策略。

图2 并网逆变器控制框图 Fig. 2 Control block diagram of the grid-connected inverter
图2中,直流侧电压Udc与参考电压比较后,经电压外环计算得到电流内环d轴参考值; 内环滑模控制器的计算结果经反Park变换得到控制信号uα、uβ。
考虑到外界不确定干扰对系统的影响,式(1)可改写为:
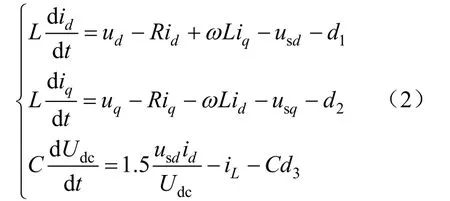
式中:d1、d2项表示由系统参数摄动、负载变化引起的如电网电压波动等不确定扰动;Cd3项表示由电容容差、光照强度变化等引起的逆变器直流侧不确定扰动。
2.1 电压外环控制器设计
根据系统的控制目标,定义电压外环控制器的跟踪误差为:

跟踪误差的导数为:

为了减少系统稳态误差,补偿系统的不确定性,引入积分滑模面:

采用指数趋近律,令

将式(5)与式(4)(6)联立得电压外环滑模控制率为:

式中:ε>|d3|;k>0;kS为指数趋近项,λe为比例项,两者共同保证了当系统运动点离切换面较远时,能以较大的速度趋近切换面;εsgn(S)为等速趋近项,保证了系统运动点在有限时间到达切换面;iL/C为受系统参数影响的控制项。

结合式(2)(7)可以证明

由式(9)可以看到,在ε>|d3|、k>0的条件下,本文所设计的电压外环滑模控制器在满足滑模稳定性条件的同时,可保证系统的鲁棒性。
2.2 电流内环控制器设计
根据系统的控制目标,选取逆变器输出电流为控制量,定义电流内环控制器的跟踪误差为:
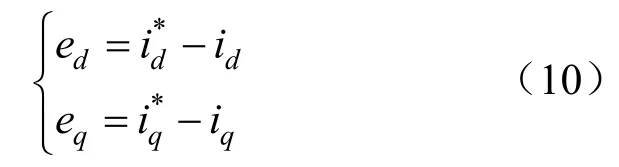
为了实现单位功率因数并网,需对无功电流iq进行控制,即式(10)中=0。
电流内环的滑模面采用:

式中:c1、c2表示控制器跟踪误差的收敛速度。在该滑模面下,跟踪误差将指数收敛于0。
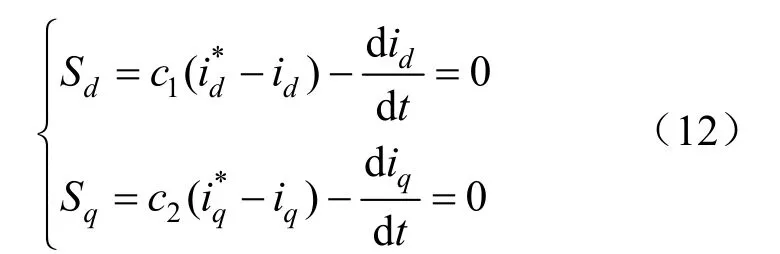
将式(1)与式(12)联立得:

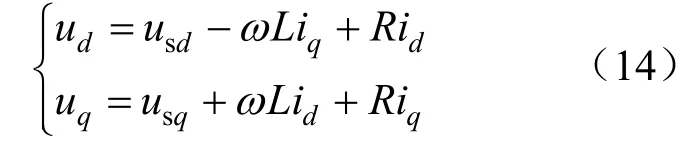
将式(13)(14)联立可以得到简化后的滑模面:
目前,常用的趋近律有等速趋近律、指数趋近律、幂次趋近律等。等速趋近律的趋近速度与抖振程度取决于单一系数;指数趋近律在其基础上增加了指数项以提高趋近速度,但当S接近零时趋近速度仍较大。
为降低抖振,在系统状态趋近于滑动模态(S较小)时,需要确保控制增益较小。若进一步考虑应用幂次趋近律,则由于不存在指数项,趋近过程会较为缓慢。
本文采用一种新型的趋近律:

式中:n=1,2;α、β为正的控制参数。
在本文所设计的系统中,α、β为恒定值。经仿真,此处α取值为0.5,β取值为2。
当系统状态远离切换面(|S|>1)时,由于控制参数β的存在,趋近律的第二项等效为指数项,可以保证该趋近律的趋近速度高于幂次趋近律。此时,k2决定了系统状态向切换面的趋近速度。
当系统状态接近切换面(|S|<1)时,该趋近律可以保证较小的控制增益,以降低抖振。此时,k1决定了系统状态到达切换面的趋近速度和抖振程度。为了保证快速趋近的同时削弱抖振,应在增大k2的同时减小k1。
联立式(1)(15)(16),得到改进后的电流环滑模控制率为:
式中:常数k12、k22为指数趋近项系数。
k12、k22越大,系统状态距切换面较远时到达速度越快;k11、k21越大,系统状态接近切换面时的趋近速度越快;但该值的增大也将引起系统的抖振程度的增加。
在该控制律中,为了保证系统状态快速趋近切换面的同时削弱抖振,应在增大k12、k22的同时减小k11、k21。
以电流环滑模控制率的d轴分量为例进行稳 定性分析,定义Lyapunov函数,则

结合式(2)(17)可以证明

由式(19)可以看到,在k12>|dn|、k22>|dn|、k11>0、k21>0条件下,本文所设计的电流内环滑模控制器满足滑模稳定性条件,同时可保证系统的鲁棒性。
3 仿真及结果分析
为了验证所设计滑模控制器的有效性,依据图2在MATLAB/Simulink中搭建仿真模型。
在理想电网条件下,分别采用双闭环PI控制和双闭环滑模控制进行对比仿真研究。
系统的主要参数见表1。
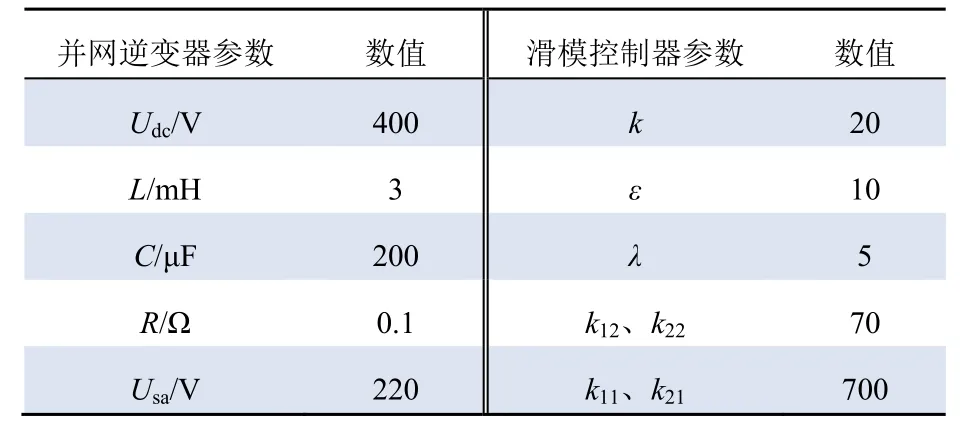
表1 系统仿真参数 Tab. 1 System simulation parameters
3.1 动态性能和稳态性能分析
分别对比在2种控制方式下的A相入网电流及电压波形、直流侧电压波形、入网电流总谐波畸变率,分析系统响应的动态与稳态性能。
3.1.1 入网电流及电压分析
A相入网电流及电压波形对比结果分别如图3、图4所示。
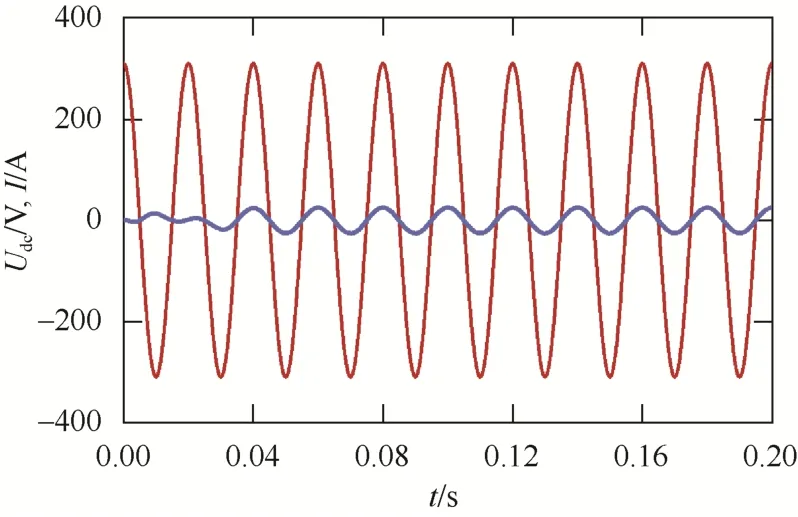
图3 滑模控制下的A相入网电流及电压波形 Fig. 3 Waveform of A-phase grid connected current and voltage under sliding mode control
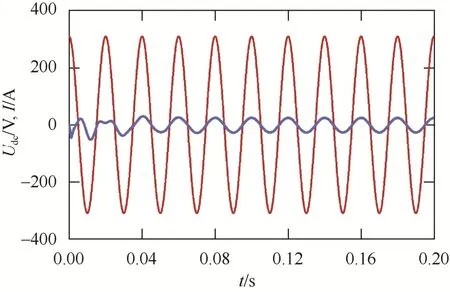
图4 PI控制下的A相入网电流及电压波形 Fig. 4 Waveform of A-phase grid connected current and voltage under PI control
由图3、图4可知,对于入网电流,PI控制下达到稳态值的时间约为0.06 s,而滑模控制下达到稳态值的时间约为0.03 s;在调节时间内,PI控制下的入网电流振荡幅度明显大于滑模控制。
3.1.2 直流侧电压分析
直流侧电压波形对比结果如图5所示,动态性能对比结果如表2所示。

图5 光伏并网逆变器的直流侧电压对比 Fig. 5 Comparison curve of the DC side voltage of PV grid-connected inverter
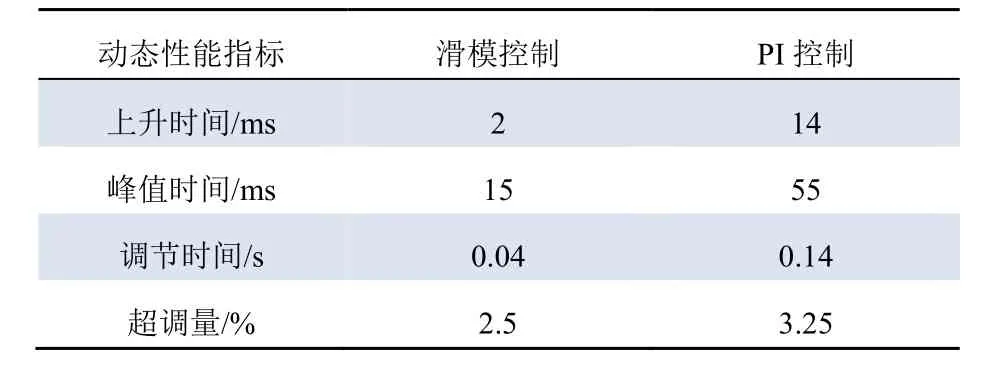
表2 直流侧电压的动态性能对比 Tab. 2 Comparison of dynamic property of the DC side voltage
由图5及表2可知,对于逆变器直流侧电压,在滑模控制下,上升时间、峰值时间及调节时间远小于PI控制,证明所设计滑模控制器响应的总体快速性优于PI控制;在滑模控制下的超调量小于PI控制,证明所设计滑模控制器响应的平稳性优于PI控制。
3.1.3 入网电流总谐波畸变率分析
A相入网电流的总谐波畸变率(total harmonic distortion,THD)对比结果如图6、图7所示。
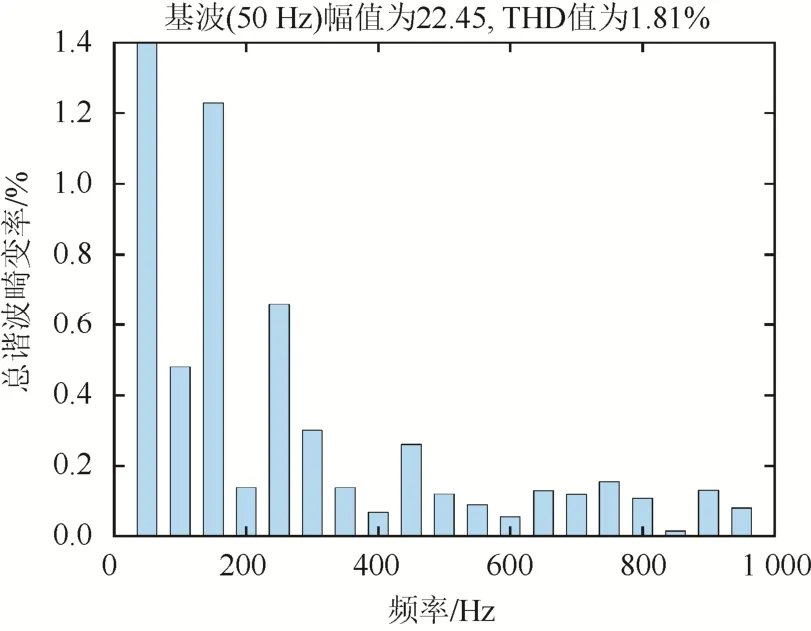
图6 A相入网电流在滑模控制下的总谐波畸变率 Fig. 6 Distortion rate of A-phase grid connected current under sliding mode control

图7 A相入网电流在PI控制下的总谐波畸变率 Fig. 7 Distortion rate of A-phase grid connected current under PI control
由图6、图7可知,滑模控制下的THD为1.81%,PI控制下的THD为4.13%,两者都满足“小于5%”的并网标准;但滑模控制下的电流总谐波畸变率显著低于PI控制。
3.2 鲁棒性能分析
3.2.1 光照强度变化对系统的影响
为了分析直流侧不确定扰动Cd3对系统的影响,以光照强度的变化作为逆变器直流侧不确定扰动的因素,进行仿真计算。
光伏阵列的工作环境设置为:温度25 ℃,光照强度1 kW/m2,从0.5 s变为500 W/m2。
图8为该环境下,采用这2种控制方式时的直流侧电压波形对比。

图8 光照强度变化时的直流侧电压对比 Fig. 8 Comparison curve of the DC side voltage under light intensity changes
由图8可见,0.5 s到1 s期间,由于光照强度的突变,2种控制方式下逆变器直流侧电压出现了不同程度的跌落:在滑模控制下,系统恢复稳态的时间约为0.06 s,期间电压最大跌落值约5 V;PI控制下系统恢复稳态的时间约为0.2 s,期间电压跌落最大值约10 V。可见,对于直流侧电压的扰动,所设计的滑模控制器表现出较强的鲁棒性。
3.2.2 电网电压波动对系统的影响
为了分析不确定扰动d1、d2对系统的影响,用电网电压波动模拟系统参数摄动、负载变化等引起的网侧电压波动,开展仿真实验。
仿真实验参数设置为:系统电网电压有效值为220 V,峰值约为311 V,允许偏差为±10%。电网电压在0.4 s时降低10%,在0.6 s时恢复到311 V。
电网电压波动时,2种控制方式下的直流侧电压波形对比结果如图9所示,系统频率对比结果如图10所示。

图9 电网电压波动下的逆变器直流侧电压 Fig. 9 The DC side voltage of PV grid-connected inverter under grid voltage fluctuation
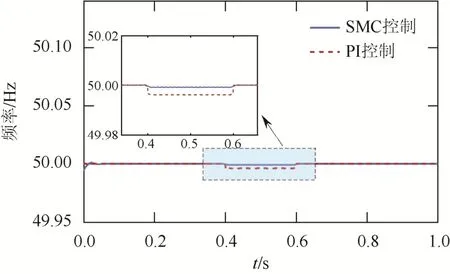
图10 电网电压波动下的系统频率 Fig. 10 System frequency under grid voltage fluctuation
由图9可以看出:在0.4 s电网电压降低时,逆变器直流侧电压在滑模控制下几乎无波动;在PI控制下,直流侧电压存在约2 V的跌落,约0.03 s后恢复到稳态。在0.6 s电网电压恢复时,滑模控制下的逆变器直流侧电压几乎无波动;在PI控制下,直流侧电压升高约2 V,约0.03 s后恢复到稳态。
由图10可见,发生电网电压波动时,在2种控制方式下,系统频率都出现了微小的降低;滑模控制下的系统频率降低幅度显著低于PI控制。
综上可知,在网侧电压出现不确定干扰时,所设计的滑模控制器表现出较强的鲁棒性。
4 结论
考虑光伏并网系统存在直流侧和网侧不确定干扰,本文提出了一种改进的双闭环滑模控制策略。通过仿真实验,将本文策略与传统的逆变器控制策略进行对比分析,得出的主要结论如下。
(1)本文控制策略通过电流内环滑模控制,实现了对入网电流的反馈控制、入网电流的正弦化及单位功率因数并网,通过电压外环滑模控制实现了直流侧电压稳定。对趋近律和滑模面的改进以及积分环节的引入,有效提高了系统的动稳态性能。
(2)针对外界不确定干扰问题,在电流内环滑模控制器中引入了新型趋近律,通过其在系统状态远离切换面条件下所具有的高增益特性,削弱了系统抖振,使系统获得较好的鲁棒性、表现出良好的抗干扰能力。
