机载LiDAR系统在山区大比例尺地形图测绘中的应用研究
2022-10-08申秋羚林毅
申秋羚 林毅
(海南水文地质工程地质勘察院,海南 海口 571100)
1 引言
随着我国经济社会发展转型,针对农村的一系列改革措施不断出台,由此,政府部门对现势大比例尺地形图的需求不断增大、要求越来越高,而这些地区大都位于我国的山区,给地形图测绘工作带来一定困难。传统的山区大比例尺地形图测绘主要依靠人工野外生产的方式[1],由于山区地势高低起伏、沟壑悬崖峭壁多、植被茂密,导致GPS 信号容易被遮挡,不仅存在测量工期长、精度低、劳动强度大,而且还严重影响到作业人员的人身安全。
近年来,LiDAR 技术逐渐兴起,其具有高效率、高精度、可穿透植被等诸多优点[2],其中,以机载LiDAR 系统为代表的先进技术已经显示出越来越大的应用潜力,完美解决了传统山区大比例尺地形图作业方式存在的问题。
2 机载LiDAR 系统
2.1 机载LiDAR 系统组成
机载LiDAR 是激光探测及测距系统的简称,它是将激光扫描系统、GPS 设备和INS 等设备紧密集成,以飞行平台为载体,通过对地面进行扫描,记录目标的姿态、位置和反射强度等信息,获取地表的数字化精确三维模型信息,并深入加工得到所需空间信息的技术。机载激光雷达系统主要由激光扫描系统(激光测距单元和光学机械扫描单元)、定向定位系统POS(动态差分GPS 和惯性导航系统INS)以及GPS 地面基站组成,如图1 所示。
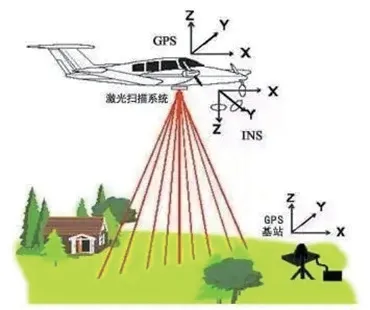
图1 机载激光雷达系统组层
2.2 机载LiDAR 系统原理
机载LiDAR 对地观测的基本原理是已知点加矢量的方法求取未知点坐标,假定激光扫描仪的投影中心O的三维坐标(Xo,Yo,Zo)由GPS 确定;姿态测量装置提供观测平台法线的仰俯角Φ、侧滚角ω、偏航角κ及观测方向和法线的夹角θ,由此组成的矢量矩阵可算出方向余弦,矢量的模S根据激光测距仪获取,则未知点Pi的坐标(Xi,Yi,Zi)即可由式(1)求得[3]。

3 项目实例
3.1 项目概况
某大比例尺地形图测绘项目位于海南省中部山区,测区内地势险峻,沟壑纵横,森林茂密,水流湍急,河谷遍布,巨石林立。山体表面多为危岩及崩塌堆积,海拔在500 ~1000m,最大高差500m,地面坡度在8 ~45 度,地形类别为山地。根据测区自然地理、气候和交通等情况,该测区作业困难级别为V 级。测区长约2km、宽约1.5km,由于地形地貌复杂,传统的人工外业数据采集难度系数高,测绘精度难以保证,本项目拟采用机载LiDAR 系统进行作业。
项目采用的设备为华测P580 无人机平台搭载AS-300HL 多平台激光雷达测量系统,该系统能够在复杂地形和危险测区情况下不直接接触危险目标,详细、快速地进行外业数据的采集,既能保证人员和设备的安全,又能保证成图的精度。利用机载LiDAR 系统采集约3km2目标区域内的激光点云和影像数据,通过对获取数据的后续处理得到该区域内l ∶500DLG、DEM、DOM 产品,该项目的作业流程如图2 所示。

图2 机载LiDAR系统作业流程
3.2 前期准备
前期准备阶段包括资料收集、测区踏勘、空域申请等[4],通过测区资料收集,研究获取测区大体地形地貌特征,为航飞设计和机载扫描做好准备工作。
3.3 机载扫描
机载扫描采集内容包括:扫描方案设计、静态基站架设、采集过程监测等环节[5]。扫描方案设计包括飞行参数设计和飞行航线规划。飞行参数包括:无人机飞行高度、扫描航线带宽两个指标的设定,需要综合考虑激光扫描仪参数设置、测区房屋间距等要素的影响。航线规划主要是飞行时航线方向的确定,原则是:(1)满足建筑物扫描完整性的同时提高无人机的使用率,即飞行最短的时间获取更完整的点云数据;(2)保证航线整体相对较长且扫描方向与房屋方向时刻存在夹角,以便减少转弯以及获取房屋四面墙体。
在实际扫描作业中,还需在测区范围内架设一台静态GNSS 接收机,同步接收和记录卫星信号,用于后期数据解算。外业点云采集的同时要进行采集监测,目的是为了准确记录扫描的工程文件信息,便于后期开展数据解算和内业测图工作。
3.4 点云数据解算和精度检核
数据解算方法主要包括三个部分:(1)差分GPS 处理;(2)轨迹文件解算;(3)点云数据输出[6]。差分GPS 处理和轨迹解算部分使用Inertial Explorer 软件进行处理,点云数据输出采用设备自带的激光解析软件进行处理。为了保证激光点云扫描数据精度,在扫描的同时,安排外业现场调查人员利用全站仪实测一批检查点。其中,检查点要分布均匀,用于平面精度检测的检查点以房角点为主,穿插部分屋檐点;用于高程精度检测的检查点要以硬质路面点为主。对于测区中的噪声点,需通过TerraSolid 软件逐块进行噪声点的剔除,反复调整相关参数剔除点云数据的明显噪声,以便开展DEM 生产。
3.5 DEM 生产
获取的点云数据,除了地面点还包括植被、建筑等非地面点数据,需要经过点云分类得到地面点。利用分类好的地面点成果数据,结合带有高程信息的特征线,就可以制作高精度的DEM 成果。由于通过点云数据生成得到的等高线曲线折点较多,不够平滑,为了进一步提高等高线的精度和美观程度,需要后期进行手工编辑修饰,编辑原则包括:平缓地区等高线走向的正确性、V 字形山脊山谷朝向的正确性等。基于DEM 成果生产的等高线如图3 所示。

图3 基于DEM成果生产的等高线
3.6 点云立体采编
除了采集等高线和高程点之外,还需要采集居民地、水系、交通、地貌、植被、管线等地物信息。本项目使用点云立体采编软件LiDAR Feature,直接在三维立体点云环境下,结合获取的正射影像数据并进行数字测图。点云环境下的地形立体采编如图4 所示。

图4 点云环境下的地形立体采编
3.7 外业调绘和内业编辑
数据内业采集完成后,需要进行外业调绘与补测,目的是对内业采集的所有要素进行定性,补测、补调隐蔽地物、新增地物和采集遗漏的地物,并纠正内业采集错误的地物,进行全面的实地检查、补测、地理名称调查注记、屋檐改正等工作,要求做到图面和实地景观保持一致,保证其数学精度。地形图内业编辑按外业调绘的内容,用人工干预方式,对原立体采集初编的矢量数据图的内容作编辑修改。以统一的线型库、符号库、字库和要素代码分层标准进行编辑。
3.8 点云数据精度分析
为保证激光点云数据的精度,在扫描的同时,安排外业人员利用GNSS-RTK 实测一批检查点,用于平面精度检测的检查点以房角点为主,穿插部分屋檐点;用于高程精度检测的检查点要以硬质路面点为主。本项目以中误差作为精度指标对机载LiDAR 点云数据的精度进行分析评价,在测区范围内均匀采集165 个点作为检查点,经检定,测区点云数据平面中误差为±4.63cm,高程中误差为±6.49cm,满足有关规范的精度要求,部分点云精度统计数据如表1 所示。

表1 点云精度统计
3.9 效率统计分析
任务完成后,项目组将传统大比例尺地形图测绘方法与机载LiDAR 系统的生产效率进行了测算比较:在外业效率方面,利用GPS-RTK 和全站仪测图1km2需要2 人,用时4 天左右,而机载LiDAR 系统只需1 人不足1 小时就能完成外业数据采集。在内业效率方面,传统方法需要对数据进行展点,再跟草图进行对比,最后绘制出地形图,而机载LiDAR 系统可以在导出数据后直接在点云上进行描绘,再经过简单处理就可直接出地形图。经比较,内业出图效率比传统作图高出4 倍以上。总体来看,机载LiDAR 系统和传统测绘方法相比,生产效率至少提高8 倍以上。
4 结束语
机载LiDAR 系统在山区大比例尺地形图测绘中取得了良好的应用效果,通过应用,总结如下:
(1)在植被茂密的山区,人工野外实测存在信号失锁的情况,而机载LiDAR 系统因为GPS 信号不被植被遮挡,因而不会出现由于信号失锁带来的精度的降低。与地面全野外地形测绘方式相比,机载LiDAR 系统是通过飞机在空中采集数据,遮挡少、信号强、点云精度高,不存在测量盲区,作业更加机动灵活。
(2)山区地形复杂,存在人工难以到达的复杂地形或者危险测区,机载LiDAR 系统能够详细、快速地进行外业数据采集,既能保证人员和设备安全,又能保证成图精度。利用机载LiDAR 系统获取数字高程模型(DEM)、数字地面模型(DSM )更为方便、高效,具有作业成本低、数据精度高、利于成本控制等优点。 (3)与低空航空摄影相比,机载LiDAR 系统是一个主动系统,不受阴影与太阳高度角的影响,受天气影响较小,有效作业时间长。机载LiDAR 系统将山区地形图测绘工作从“外”搬到“内”,大大减少了外业测图人员的工作量,提高了工作效率。
随着LiDAR 设备的越来越小型化,其搭载的载体将会更加丰富,基于多平台(无人机载、车载、手持)的LiDAR 系统都已面世,相信随着国家新型基础测绘的启动,LiDAR 系统在全要素地形图生产中必将具有广阔的应用前景。