CT三维重建技术在PPGL腹腔镜手术规划中的应用研究*
2022-10-08崔庆敖张伟阳刘清源江世浩张金栋秦梓榛代坤含丁思伟王德林
覃 茂,崔庆敖,张伟阳,刘清源,江世浩,张金栋,秦梓榛,代坤含,丁思伟,王德林
(重庆医科大学附属第一医院泌尿外科 400016)
嗜铬细胞瘤和副神经节瘤(pheochromocytoma and paraganglioma,PPGL)以分泌大量儿茶酚胺为特点,在临床上少见,其中有80%~85%发生于肾上腺髓质,称为嗜铬细胞瘤,有15%~20%发生于肾上腺外,沿交感/副交感神经节分布,统称为副神经节瘤。PPGL患病率大约是每年每100万人6例[1]。自20世纪末以来,腹腔镜肾上腺切除术一直是所有肾上腺肿瘤外科术式的金标准[2]。然而,腹腔镜手术的操作空间相较于开放手术更加狭小,处理嗜铬细胞瘤往往比较困难,其肿瘤体积较大、血供十分丰富、解剖位置特殊、可能存在变异血管分支等特点都增加了手术难度,术中探查、血管结扎、肿瘤切除等操作都难以避免对肿瘤的挤压,造成大量儿茶酚胺释放入血,带来的激素风暴可诱发心脑血管疾病,甚至猝死。PPGL的早期围术期死亡率高达40%,近年来围术期死亡率已经明显降至3%以下[3]。这不仅得益于充分的围术期准备,还与临床影像技术的快速发展密切相关。目前临床上术前制订手术规划仍旧依据CT[4],但在二维平面图像上很难想象复杂肿瘤的外科学解剖结构,尤其是重要血管的走行及其与毗邻器官组织的关系,从而更加依赖于术中对肿瘤的探查,延长手术时间,提高手术风险。此外,基于二维图像的手术规划有可能遗漏某些重要的解剖信息,如变异血管分支,从而造成术中失误,增加术中出血的风险。传统二维图像的影像技术越来越不能满足术者精准手术的需求。近年来,CT三维重建技术是利用多层螺旋CT采集到的图像数据经过三维重建,从而得到客观、立体、精确的术前个体化、数字化三维模型图像,可以在术前提高手术区域的可视性和可达性,再由经验丰富的手术医师制订个体化的手术方案,提前判断出肿瘤滋养血管的走行及血管变异可能导致的血管损伤,减少术中出血量,缩短手术时间,减少术中血流动力学不稳定带来的意外事件,从而提高手术安全性。如今,基于CT的数字化三维重建技术已经在临床各科室广泛开展,越来越多的证据表明CT三维重建技术在PPGL腹腔镜手术规划中存在优势,现报道如下。
1 资料与方法
1.1 一般资料
选取2015年1月至2021年10月本院110例PPGL术后患者为研究对象。纳入标准:(1)肿瘤直径>3 cm[5];(2)单侧肿瘤;(3)腹腔镜手术或机器人辅助腹腔镜手术;(4)术后病理诊断为PPGL。排除标准:(1)合并严重心肺功能疾病;(2)合并严重凝血功能异常;(3)既往腹部手术病史。根据术前是否行CT三维重建评估分为重建组(n=30)和对照组(n=80)。两组一般资料比较,差异无统计学意义(P>0.05),具有可比性,见表1。
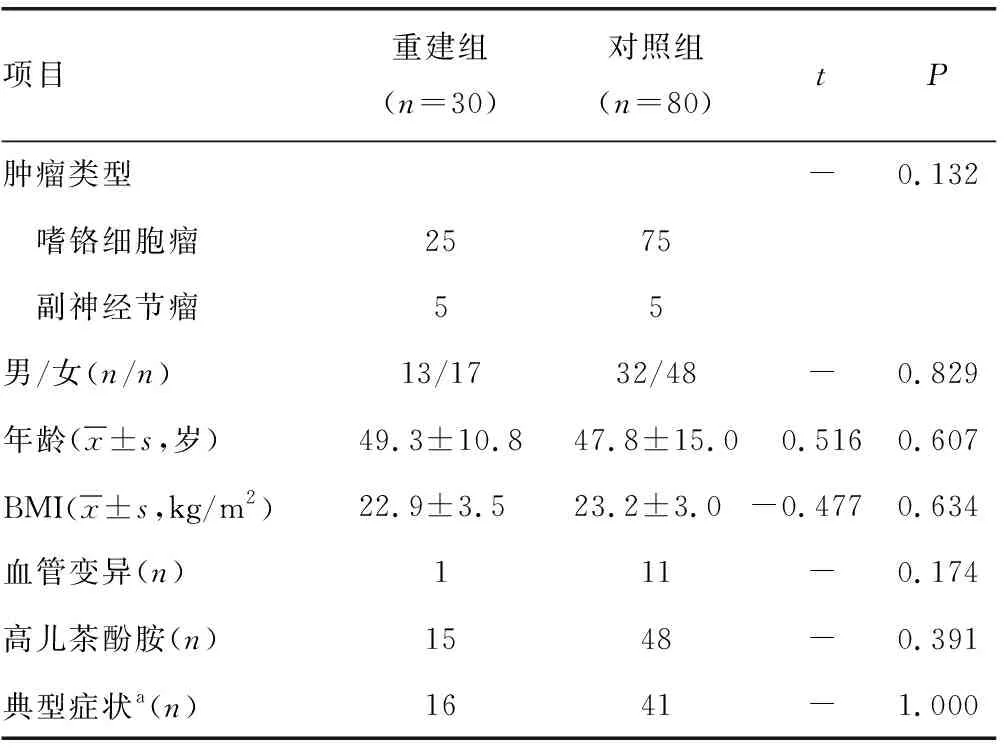
表1 两组一般资料比较
1.2 方法
1.2.1术前准备
所有患者术前均予以口服α受体阻滞剂(酚卞明),时间>7 d,心率>80次/分钟的患者加用美托洛尔降低心率,术前3 d开始静脉滴注羟乙基淀粉注射液和乳酸钠林格注射液积极扩容治疗,手术当天凌晨开始禁饮禁食。
1.2.2手术方法
经腹膜入路:患者取左/右侧卧位,腋下垫软枕,术野常规聚维酮碘消毒、铺巾。在肚脐旁作1.5 cm切口,钝性分开肌肉及筋膜,进入腹腔,置入腹腔镜套管,建立12 mm Hg气腹,直视下分别在髂前上脊上方腋前线,肋骨缘下置入12 mm Trocar。插入腹腔镜及操作器械,术中用超声刀打开右/左结肠旁沟,分离右/左肾上腺区,仔细游离周围脂肪,沿肿瘤边缘以结扎血管夹结扎肾上腺分支血管,完整切下肾上腺肿瘤后,将肿块装入标本袋,仔细检查肾上腺肿瘤区域出血点,予以充分止血后,术野留置一次性使用引流管1根,再次清点器械与纱布无误后,扩大脐旁切口取出标本,可吸收外科缝线逐层关闭各切口,结束手术。
经腹膜后入路:患者取左/右侧卧位,腋下垫软枕,调整手术床使患者呈“︵ ”形以暴露右/左侧腰腹部术野,常规聚维酮碘消毒、铺巾。在右侧腋后线第12肋缘下作2 cm斜切口,钝性分开肌肉及筋膜,进入后腹腔,插入扩张器,充气500 mL扩张后腹腔间隙后,分别在腋前线肋缘下、腋后线肋缘下、腋中线髂棘上置入腹腔镜套管,建立12 mm Hg气腹。插入腹腔镜及操作器械,术中用超声刀分离腹膜后脂肪,沿肾周筋膜分离,分离出右/左肾上腺区前后平面,沿肾脏向上方游离至右/左肾上极并与肾上腺区下缘离断。仔细游离肿瘤周围脂肪,以结扎血管夹结扎肿瘤边缘分支血管,完整切除肾上腺肿瘤后,将肿块装入标本袋,仔细检查肾上腺肿瘤区域出血点,予以充分止血后,术野留置一次性使用引流管1根,再次清点器械与纱布无误后,扩大腋中线肋缘下切口取出标本,可吸收外科缝线逐层关闭各切口,结束手术。
1.2.3术后管理
术后常规禁饮禁食,待恢复肠道排气功能后可适当行流质饮食。术后24 h监测血压心率水平,术后第1天复查电解质水平,引流液连续2 d少于50 mL可考虑拔除引流管。
1.2.4观察指标
(1)观察并记录每例患者的手术时间、术中出血量、术中血流动力学参数、恢复进食时间、引流管保留时间等情况。(2)术中高血压定义为收缩压>200 mm Hg或舒张压>100 mm Hg,术中低血压定义为收缩压<80 mm Hg。术中血流动力学不稳定定义为手术期间至少发生1次收缩压≥160 mm Hg和至少1次平均动脉压<60 mm Hg[6]。(3)术后严重并发症根据日本临床肿瘤研究组术后并发症标准(JCOGPC标准)分级定义为Ⅱ级或以上的并发症[7]。
1.3 统计学处理
2 结 果
2.1 两组手术情况比较
两组手术情况比较,差异无统计学意义(P>0.05),见表2。

表2 两组手术情况比较
2.2 两组术中血流动力学参数比较
两组肿瘤操作时收缩压峰值、血压波动幅度、术中最高心率、心率波动幅度比较,差异有统计学意义(P<0.05),见表3。

表3 两组术中血流动力学参数比较
2.3 两组术后情况比较
两组均未发生Clavien-Dindo≥Ⅱ级的并发症,两组重症监护室(ICU)入住例数、恢复进食时间、引流管保留时间比较,差异无统计学意义(P>0.05),见表4。

表4 两组术后情况比较
3 讨 论
自1886年首次对嗜铬细胞瘤描述以来,PPGL在诊断学、遗传学、解剖学、功能成像及外科治疗方面都有了巨大进展。近年来,PPGL的发病率呈上升趋势,随着人们健康意识的日益增强,越来越多的隐匿性嗜铬细胞瘤得到了及时的诊断。
手术切除是PPGL唯一的治疗方式,同时这也是极具风险的手术之一。PPGL手术方式从早期的开放手术逐渐过渡到腹腔镜手术[8-9],近年来,机器人辅助腹腔镜手术也在PPGL手术中取得较好的临床效果[10]。本研究共纳入68例腹腔镜手术患者和42例机器人辅助腹腔镜手术患者,均由有经验的主刀医师成功完成。
由于肾上腺解剖位置较深,周围邻近较多重要器官,血供较为复杂,尤其是副神经节瘤粘连更重,术中对肿瘤的探查极可能会造成儿茶酚胺大量释放入血,带来血压心率的剧烈波动,从而导致更多术后并发症的发生。在临床实践中,如何减少术中血流动力学不稳定事件的发生一直困扰着术者。PPGL腹腔镜手术在3个围术期阶段与血流动力学不稳定的高风险相关:气管插管、气腹形成和肿瘤操作[11]。因此,除了充分的术前药物准备外,术者还需要准确识别肿瘤的毗邻结构和结扎肿瘤血管,通过最小挤压肿瘤以预防术中儿茶酚胺的释放及随后的血流动力学不稳定[12]。如今,基于CT数据的三维重建技术已经在临床各科室广泛开展应用,CT三维重建技术可以提前判断出肿瘤滋养血管的走行及血管变异可能导致的血管损伤,减少术中出血量,缩短手术时间,减少因术中血流动力学不稳定带来的不确定性事件的发生,从而提高手术安全性及手术效率。既往研究表明,血管生成是肿瘤的生长、进展和转移的必要条件。孙福康[13]研究发现,嗜铬细胞瘤的血管生成极为活跃,其中部分嗜铬细胞瘤存在血管走行和形态异型性。嗜铬细胞瘤静脉系统也存在较多的血管交通支,术中优先结扎肾上腺中央静脉,可以减少术中血压波动幅度[14]。
术中血流动力学波动是PPGL手术术后并发症的独立危险因素,同时与更高的ICU入住率密切相关[15]。PPGL肿瘤体积过大和高尿肾上腺素水平是术中血流动力学不稳定的肿瘤相关因素[16-17]。本研究中重建组血压和心率波幅为明显低于对照组。两组术后均未发生严重并发症。由此可见,对于预估术中血流动力学不稳定高风险的PPGL患者有必要术前行CT三维重建,精准规划手术方案,减少术中不必要的肿瘤挤压,可以减少术中血流动力学不稳定的发生,增加手术安全性。
CT三维重建技术的优势还在于可以在个体化三维立体模型中去掉肝脏、骨骼等周围结构的干扰,动态、直观地显示肿瘤周围结构,提高手术区域的可视性,精准地划分手术高风险区域和重点保护结构等。
综上所述,在PPGL的腹腔镜手术规划中,CT三维重建技术可以减少术中对肿瘤的挤压,减小术中血压和心率波动,提高手术安全性。但本研究也存在一定的局限性,CT三维重建精度不够高,部分血管不能显示,且作为一项回顾性研究,术前药物准备标准不统一,限制了对手术效果更加准确的评价。
