大气湿度对天然气发动机性能的影响
2022-09-30徐鹏韩雨潘永传王永健
徐鹏,韩雨,潘永传,王永健
潍柴动力股份有限公司,山东 潍坊 261061
0 引言
随着发动机行业的快速发展,天然气发动机的市场占比逐渐上涨,客户对天然气发动机整体性能的要求日益提高[1]。天然气发动机输出性能受空气充量、废气再循环(exhaust gas recirculation,EGR)率、点火角、空燃比等参数的影响。发动机在台架上进行性能标定时,进气空调控制相对湿度为25%左右,而整车在实际运行过程中会受到大气湿度的影响,出现功率不足、放炮、爆震等故障[2-3]。
本文中针对不同大气湿度,提出一种天然气发动机的模糊控制方法,分别建立修正模型,对理想条件下标定的空气充量、EGR率和点火角等参数进行修正[4],并模拟仿真,利用台架发动机进行实际验证。
1 大气湿度表示方法
大气湿度是空气中含水量的一个度量,有相对湿度和含湿量2种表征方式[5]。
1.1 相对湿度
相对湿度φ是指某一状态下,湿空气中水蒸气密度与该状态下饱和湿空气中水蒸气密度的比,其表达式[6]为:
(1)
式中:ρh、ρhmax分别为湿空气中和饱和湿空气中水的密度,kg/m3;ph、phmax分别为湿空气中和饱和湿空气的中水的压力,Pa。
1.2 含湿量
含湿量d是指某一状态下,单位体积湿空气中水蒸气的质量mh与干空气质量mk的比:
d=mh/mk。
(2)
1.3 相对湿度与含湿量之间关系
将湿空气假设为由水蒸气和干空气组成的理想气体,由理想气体状态方程[7-8]可得:
(3)
式中:ρk为干空气的密度,kg/m3;pk为干空气的压力,Pa;Rk为干空气的气体常数,J/(mol·K);Rh为水蒸气的气体常数,J/(mol·K);p0为环境压力,Pa。
将式(1)带入式(3),可得:
(4)
不同温度下d与φ关系曲线如图1所示。由图1可知:温度升高,d增大;φ增加,d增大;在高温且相对湿度较大时,d更大。

图1 不同温度下d与φ关系曲线
2 模糊控制器建立
2.1 模糊控制原理
模糊控制原理如图2所示,主要包括3部分:数字量模糊化过程、模糊规则建立以及输出变量解模糊化过程[9-11]。

图2 模糊控制原理
2.2 模糊量化处理
将传感器所测的数字信号、模型得到的数字量利用论域划分和最大隶属度规则转变成模糊控制器可以识别的模糊参量。
2.3 模糊控制规则
模糊规则是该控制方法的核心,精确数字量经过模糊化处理后,代入模糊规则,得到输出的模糊参量[12]。这一规则是根据相关专家和测试人员的经验建立。
2.4 解模糊化处理
输出模糊参量后,利用隶属度函数,采用某算法如重心法选出一个最具代表意义的数字量作为模型输出。
发动机性能标定的φ与实际存在差异时,会直接影响发动机的输出。φ增大时,设定的进气中水蒸气占比上升、干空气占比降低,导致发动机输出功率、转矩不足;φ增大导致气缸燃烧状态变差,引发失火、排温高、尾气超标等故障。
以环境温度t和空气含湿量d作为模糊控制器输入,输出为相应参数修正系数,对发动机性能参数进行微量修正,满足设计输出要求。
t模糊集论域为[-25,35],将该论域分为7段子集,负大(NB)、负中(NM)、负小(NS)、零(ZO)、正小(PS)、正中(PM)、正大(PB);d模糊集论域为[0,80],也分为7段子集,分别为负大(NB)、负中(NM)、负小(NS)、零(ZO)、正小(PS)、正中(PM)、正大(PB);增压压力修正因数kp模糊集论域为[0.99,1.20],分为4段,分别为负小(NS)、零(ZO)、正小(PS)、正中(PM);EGR率修正因数kegr模糊集论域为[0.70,1.01],分为4段,分别为负中(NM)、负小(NS)、零(ZO)、正小(PS);点火角修正因数kang模糊集论域为[0.99,1.20],分为4段,分别为负小(NS)、零(ZO)、正小(PS)、正中(PM)。
隶属度函数一般选择三角形或者梯形。因为在一定条件或者范围内,模糊控制方法的隶属度具有一定的稳定性。从最大的隶属向两侧延伸时,隶属度不断减小,而且是单调的,不具有波动性[13-15]。
t、d、kp、kegr和kang的隶属度函数如图3~7所示。隶属度函数结果为[0,1],意味着任一横坐标x,经过隶属度函数A(x)后,得到一个[0,1]的数,该数值代表横坐标x隶属于这个区间的程度。
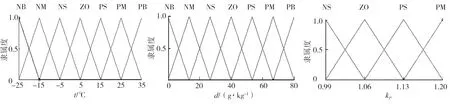
图3 t隶属度函数 图4 d隶属度函数 图5 kp隶属度函数
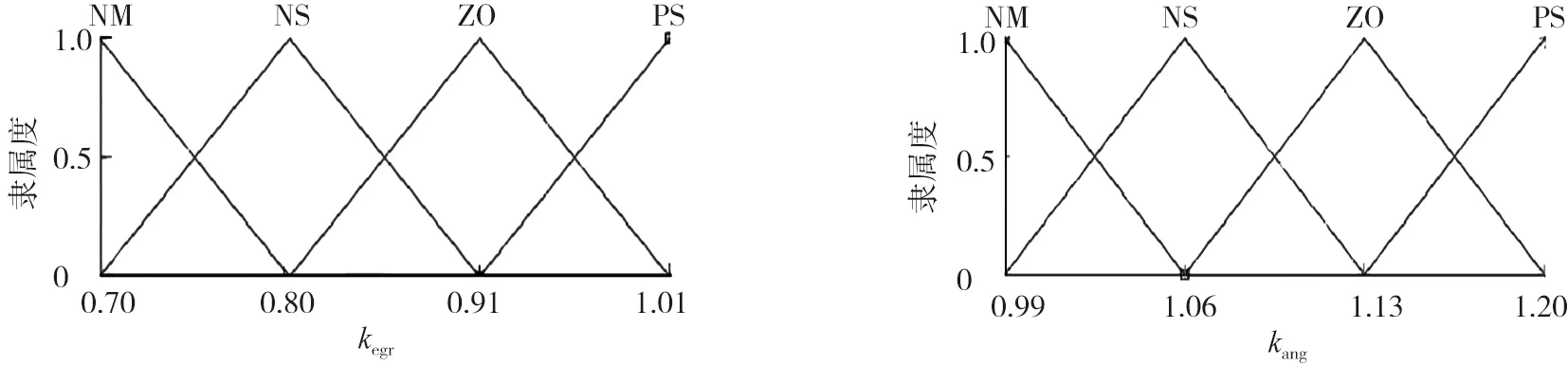
图6 kegr隶属度函数 图7 kang隶属度函数
3 控制模型
3.1 增压压力控制模型
天然气发动机实际进气量由增压器驱动、节气门控制,因此利用修正增压压力来调节进气充量[16]。假设天然气发动机在没有湿度修正前理想工况的大气压为101 kPa,t=25 ℃,d=10 g/kg,标定完成后,发动机能满足各项设定指标。实际环境中,大气湿度与理想状态不同,此时,模型输出对各参数进行修正。
t不变,d>10 g/kg时,进气充量中干空气占比下降,发动机输出功率或转矩不足,应增大增压压力;d<10 g/kg时,增压压力应适量减小。d不变,t升高时,进气充量中干空气占比上升,增压压力可适当减小,反之,增压压力可适当增大。
根据上述原则,制定基于t和d的kp模糊规则如表1所示。

表1 基于t和d的kp模糊规则
3.2 EGR率控制模型
EGR率在天然气发动机气缸燃烧过程中起相当重要的作用[17-18]。当d增大时,气缸含水量增加,燃烧恶化,点火难度增大,应适当减小EGR率,有利于气缸燃烧,同时降低点火难度;但若EGR修正太大,导致气缸内EGR占比太小,发动机容易爆震。基于上述原则,制定基于t和d的EGR率修正系数kegr模糊规则如表2所示。

表2 基于t和d的kegr模糊规则
3.3 点火角控制模型
点火提前角对发动机气缸燃烧有较大影响[19]。点火角太大,发动机容易爆震;点火角太小,容易后燃,排温升高。d增加,适当增大点火角,在不发生爆震的前提下,有利于改善气缸燃烧,提升输出功率和转矩。基于上述原则,制定基于t和d的点火角修正系数kang模糊规则如表3所示。
表3 基于t和d的kang模糊规则
修正原理为:修正进气压力,保证不同进气湿度和温度下,干空气含量相等;空气中的水分可以降低气缸内的燃烧温度,起到和EGR相似的效果,因此适当修正EGR率,可调节失火和爆震;通过调节点火角使气缸燃烧平稳,改善排放。
4 模型仿真结果及验证
4.1 仿真结果
仿真结果模糊控制输出量进气kp、kegr、kang与d、t之间的变化关系如图8~10所示。
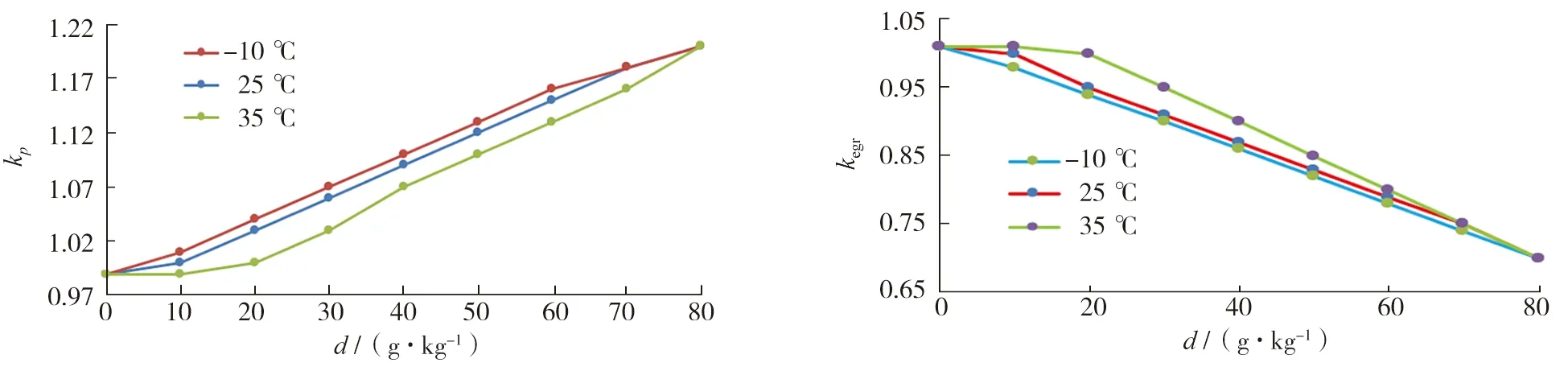
图8 kp输出曲线 图9 kegr输出曲线
由图8可知:t=25 ℃,d=10 g/kg(湿度修正前理想工况)时,kp=1,进气压力不需修正;d不变,随着t升高,压力修正系数减小;t不变,随着d增加,kp增大。变化规律与实际相符。
由图9可知:t=25 ℃,d=10 g/kg(湿度修正前理想工况)时,kegr=1,ERG率不需修正;d不变,随着t升高,kegr增大;t不变,随着d增加,kegr下降。变化规律与实际相符。
由图10可知:t=25 ℃,d=10 g/kg(湿度修正前理想工况)时,kang=1,点火角不需修正;d不变,随着t升高,kang减小;t不变,随着d增加,kang增大。变化规律与实际相符。
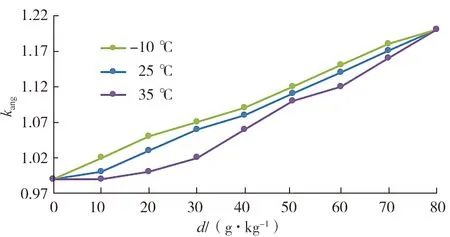
图10 kang输出曲线
4.2 台架试验验证
发动机燃烧不好失火时,输出转矩波动大,导致转速变化率增加。利用实际转速变化率与标准限值比较,判定是否发生失火。失火率是指200个循环内,失火循环所占比例。失火率越大,对催化剂的影响越大。发动机燃烧太过猛烈,导致发动机造成振动较大,通常用爆震强度表征爆震的振幅和频率。
使用进气空调模拟不同的进气温度和大气湿度,选取额定转速为1900 r/min、额定功率为301 kW的某型号燃气发动机,理想状态下(t=25 ℃,d=10 g/kg),不同进气温度和湿度下发动机功率、失火率以及爆震强度如图11~14所示。
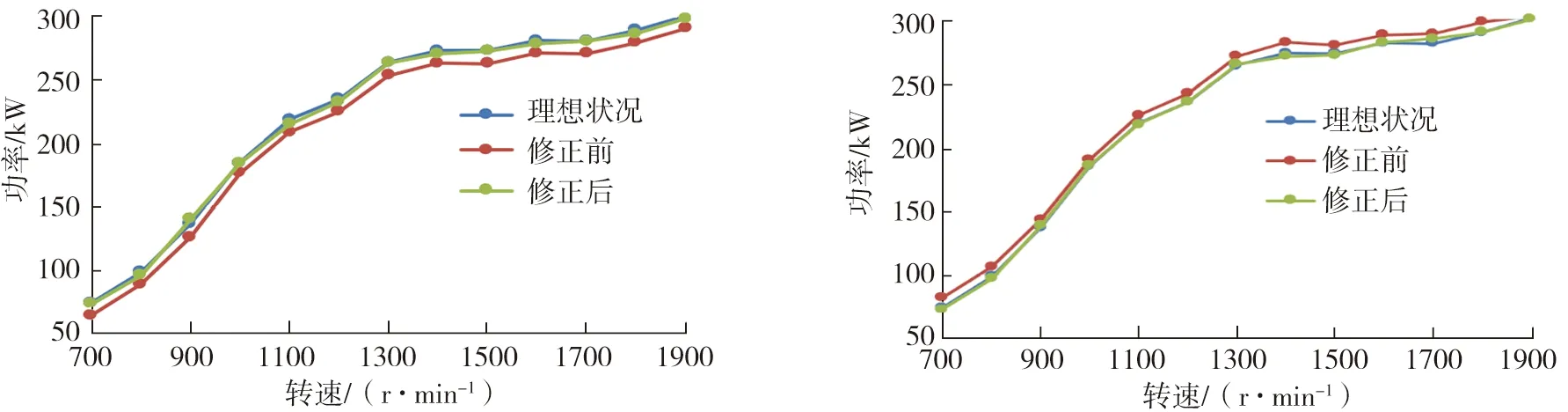
图11 d=40 g/kg时发动机功率变化 图12 t=32 ℃时发动机功率变化
由图11可知:湿度增大时,发动机输出功率下降;修正后的天然气发动机输出功率得到提升,更接近理想状态下的标定功率。由图12可知:温度升高时,发动机输出功率增大;修正后的天然气发动机输出功率下降,更接近理想状态下的标定功率。由图13可知:湿度增大时,发动机失火率上升;湿度修正后,失火率下降,比修正前更接近理想状态下的失火率。由图14可知:t升高时,发动机爆震强度增强;湿度修正后震强度下降,更接近理想状态下的爆震强度。

图13 d=40 g/kg时发动机失火率变化 图14 t=32 ℃时发动机爆震强度变化
因此,发动机输出功率、失火率以及爆震强度随环境温度和大气湿度的变化趋势与实际相符,模型准确、有效,该模糊控制策略可以提高不同湿度及温度环境下天然气发动机的输出性能,降低发动机的失火率和爆震强度。
5 结语
本文中提出了一种基于大气湿度的模糊控制方法,设计增压压力、EGR率以及点火角的修正控制,使天然气发动机在不同的大气湿度下特别是雨天等相对湿度较大的环境能够达到设计的输出效果;利用模糊控制方法,建立了空气充量、EGR率及点火角的控制模型;利用MATLAB/Simulink软件进行模拟仿真,通过台架试验进行发动机实际验证,模型准确、有效,可以提高天然气发动机在不同湿度和温度下的输出性能,降低失火率和爆震强度。
