基于改进滑模面的音圈电机位置控制*
2022-09-27刘爽英梁宇飞李国栋
白 姗,刘爽英,梁宇飞,李国栋,闫 瑾
(1.中北大学软件学院,太原 030051;2.恶劣环境下机器人与智能装备技术山西省重点实验室,太原 030051)
0 引言
音圈电机拥有动态响应速度快、稳态精度高等诸多优点,广泛应用于高精度、高频率、短距离的重复性定位高的精密制造行业中,但音圈电机在工作过程中存在参数变化、非线性摩擦、迟滞特性等不确定因素[1]。
滑模控制作为一种典型的非线性控制方法,具有响应时间快、构造简单、对系统匹配扰动具有不变性等优点,但滑模控制的最大问题在于抖振现象,并且容易受到不确定性因素的扰动影响。因此,抑制抖振现象是现行的主要研究问题[2]。研究人员从滑模面、趋近律等方面提出改进方案,以达到减小抖振的效果。滑模面设计的优劣性直接影响控制系统的稳定精度、稳定性及响应时间等各方面性能,是滑模设计的主要内容。因此,提出许多改进的滑模面以达到减小抖振的目的。例如终端滑模控制(TSM)[3-5]、积分滑模控制[6]、全局滑模控制[7]、时变滑模控制[8]、互补滑模控制(CSMC)[9]等。
HOU等[10]提出用于伺服电机系统的连续终端滑模控制算法,是一种基于双极限齐次性质的全阶终端滑模面,保证了控制系统的鲁棒性。CHEN等[11]提出一种适用于外界扰动的伺服系统位置跟踪问题,提出自适应滑模扰动观测器及新型终端滑模函数,仿真及实验验证了所提方法的有效性。CHEGINI 等[12]提出一种基于预定滑动模态和系统状态之间误差设计的量子滑模面,可用于有界不确定性的滑模控制系统中,仿真结果表明该控制方案在时间和控制幅度上均显著降低。WANG等[13]提出一种基于滑模扰动观测器的递归终端滑模控制器,兼具了非奇异终端滑模控制和高阶滑模控制的优点,仿真结果达到预期控制性能。XU等[14]针对板球控制系统设计了一种变指数幂趋近律和互补终端滑模控制相结合的控制方案,提高了收敛速度。
在上述的研究基础上,为提高滑模控制过程中的控制效果以及减小滑模抖振现象,本文设计了基于趋近律的递归型互补滑模控制,在保证减小抖振的基础上通过使用趋近律以提高趋近阶段中到达滑模面的速度,保证了控制系统的动态性能。
1 音圈电机数学模型
音圈电机数学模型根据机械结构的不同可以分为质量-阻尼-弹簧(MKF型)和质量-阻尼型(MK型)。由于MKF型音圈电机需要克服弹簧的形变力,在降低电机输出功率的同时给电机控制增加了不确定项,而MK型音圈电机无需考虑以上内容,可提高较高的输出功率。MK型音圈电机结构图如图1所示[15]。

图1 音圈电机结构
在研究中不考虑磁路闭合和迟滞特性等情况,根据音圈电机电压平衡方程和力平衡方程,建立了音圈电机匹配扰动的二阶数学模型为:
(1)
式中,x是动子位置;va是控制电压;Ra是线圈电阻;ia是线圈电流;Kb是反电动势系数;La是线圈电感;Ft=Ktia是推力;Kt是驱动力系数;M=mb+mp为总质量;mb是动子的质量;mp是有效载荷的质量;B是黏性阻尼系数;Ff是扰动及摩擦力等。
音圈电机的电感较小且其工作在高速环境下,电感La可以被忽略,故可得到音圈电机的动态方程为:
(2)
式中,f、g为系统参数;d为系统干扰项;u=va为系统控制输入。
由于音圈电机为非线性的,故音圈电机的实际动力学模型为:

(3)
式中,Δf、Δg为系统参数和未建模动态而引入的不确定性;D=Δf+Δgu+d为系统总和扰动,且|D|≤ρ,ρ为有界正常数。
将式(3)改写为音圈电机匹配扰动的二阶数学模型的状态方程形式为:
(4)
式中,x=[x1,x2]T为系统状态向量;x1、x2分别表示音圈电机动子位移和速度。
2 递归型滑模面设计
2.1 相关工作基础
文献[2]的传统滑模面(SMC)表现为系统状态的线性函数,只适用于精度不高的场合中,其表达式为:
(5)
文献[16]提出的基于广义滑模面和互补滑模面结合提出的互补滑模控制(CSMC),通过互补广义误差变换从理论角度证明比传统的滑模控制的跟踪误差界减小了一半并且提高了到达阶段误差瞬态响应,其表达式为:
(6)
式中,λ为控制参数且为正实数。
文献[14]提出的互补终端滑模控制(CTSMC),采用将互补滑模和终端滑模相结合的控制方案,使系统更快的收敛到平衡点,其表达式为:
(7)
2.2 递归型互补滑模控制
基于以上工作基础,研究基于分层思想提出的递归型互补滑模控制(RCSMC),表达式为:
第一层滑模面为:

(8)
式中,τ为积分变量;c1、c2>0分别为两个控制增益;α≥1。
第二层滑模面为:
(9)
式中,λ>0是控制增益系数。
由于滑模面设计为双层结构,可以有效的提高控制系统的鲁棒性且有较快的收敛速度,具有一定的优越性。
3 滑模控制律设计
3.1 递归型互补滑模控制律设计
递归型滑模面第一层设计为积分终端滑模控制,第二层为互补滑模控制,分别具有积分终端滑模控制和互补滑模控制的优点,在抑制抖振的基础上具有较强的鲁棒性。
定义系统跟踪误差:
e1=y-R
(10)
式中,y为系统输出状态;R为期望信号。
定义系统动态跟踪误差:
(11)
第一层滑模面求导可得:
(12)
再次对式(12)求导可得:
(13)
第二层互补滑模面中的广义滑模面求导可得:
(14)
对于增益参数,互补滑模面中的广义滑模面s和互补滑模面sc相加可得滑模面总和为:
(15)
为提高滑模变量s的收敛速度,在过程中引入新型快速趋近律,即:
(16)
式中,α=1+ε,a=1-ε;0<ε<1;k1、k2>0。
将式(10)、式(12)、式(13)代入式(14)中可得:

(17)

将式(4)的动力学模型代入式(17)中可得:
(18)
所设计的控制律为:
uRCSMC=ueq+uv
(19)
式中,
式中,ueq为等效控制项;uv为切换控制项。
可得到最终的控制律为:

(20)
3.2 稳定性证明
针对音圈电机匹配扰动的二阶数字模型控制系统建立李雅普诺夫函数:
(21)
对Lyapunov函数求导得:
(22)
根据上式可继续推导得:
即:
(23)
式中,当s+sc>0时,当s+sc<0时,uv<0。
因此,该系统在李雅普诺夫意义上是稳定的,可以保证音圈电机控制系统的稳定性。
4 仿真结果及分析
基于MATLAB/Simulink建立音圈电机匹配扰动的控制仿真模型,并对仿真结果进行详细对比分析。
仿真所需电机模型参数如表1所示。根据音圈电机模型多次调节系统控制参数,选取最优控制效果参数。传统滑模控制参数如表2所示,互补滑模控制参数如表3所示,互补终端滑模控制参数如表4所示,递归型互补滑模控制参数如表5所示。
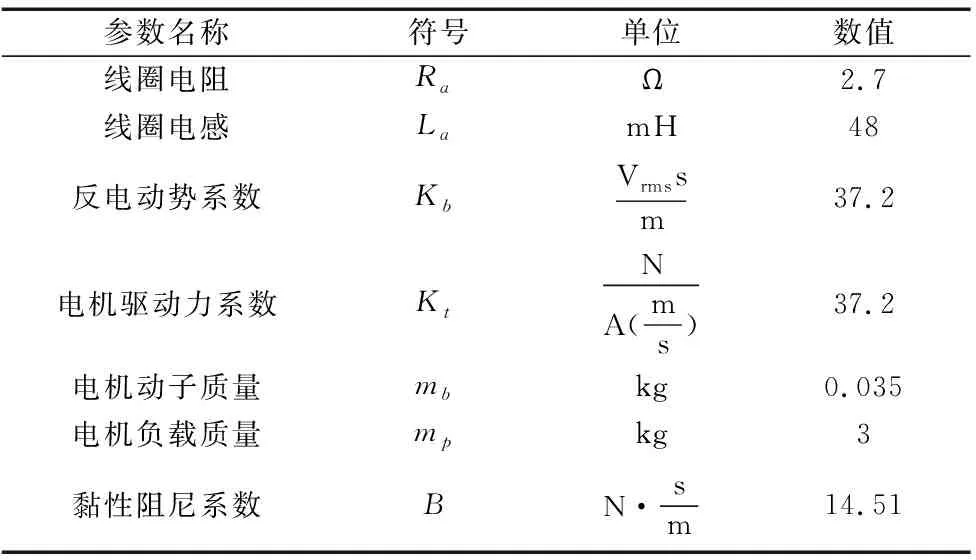
表1 电机模型参数

表2 传统滑模控制参数

表3 互补滑模控制参数

表4 互补终端滑模控制参数

表5 递归型互补滑模控制参数
跟踪正弦信号 ,初始位置设为 ,仿真结果如图2所示,具体性能如表6所示。
对正弦信号进行跟踪,仿真结果如图2所示,具体性能如表6所示。从仿真结果得知此次研究所设计的控制策略RCSMC相较于SMC和CSMC拥有更快的响应速度,响应速度略小于CTSMC,但在0.033即可达到稳态时间,是最早达到稳态时间的控制策略,并且无超调量;稳态误差方面而言,SMC的稳态误差最大,CSMC的稳态误差最小但产生了超调现象,CTSMC产生了抖振现象而无研究价值,RCSMC的稳态误差较小且无抖振和超调。
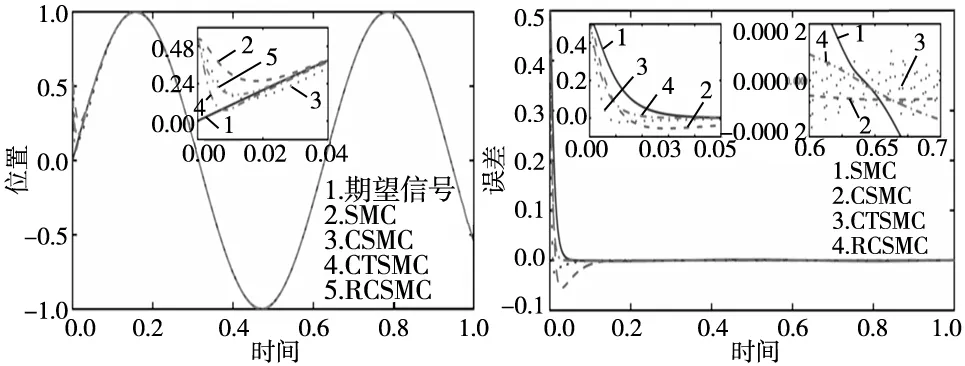
(a) 位置跟踪曲线(b) 位置误差曲线
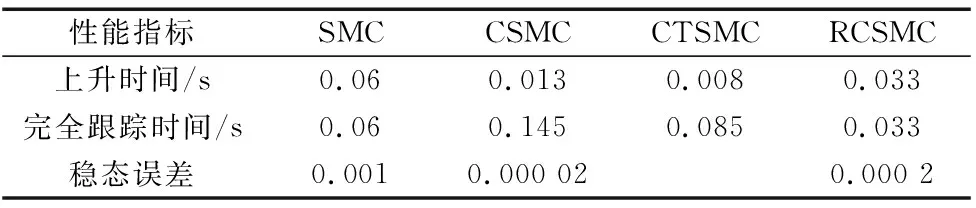
表6 跟踪sin(10t)指令的性能对比
在控制系统初始信号和参数不变的情况下,改变期望信号为三角波信号进行跟踪。仿真结果如图3所示,具体性能如表7所示。从仿真结果可知,在三角波的突变状态时,RCSMC最快达到稳定状态且无超调和抖振,拥有较好的控制效果;CTSMC是第二个达到稳定状态且产生了超调和抖振;CSMC次之,但拥有较好的稳态精度;而SMC最后到达稳定状态。
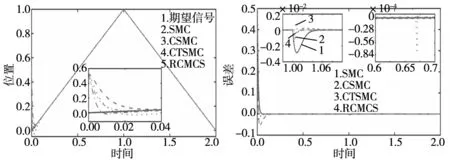
(a) 位置跟踪曲线(b) 位置误差曲线

表7 跟踪三角波指令的性能对比
综上所述,所提的RCSMC控制策略虽不是全面优秀的,但拥有较为均衡的控制效果。在改变期望信号后依旧可以保持较为优良的跟踪性能,证明所提控制算法的有效性。
5 结束语
针对音圈电机位置控制研究问题,在建立音圈电机匹配扰动的二阶模型的基础上,分别采用传统滑模控制、互补滑模控制、互补终端滑模控制和终端滑模控制这4种控制方案进行仿真分析,得出以下结论:
(1)递归互补滑模控制在稳态误差和响应速度方面虽不是绝对优良的,但其没有超调和抖振现象;
(2)互补终端滑模控制的响应时间是最快的,但其产生了抖振和超调;互补滑模控制的稳态误差是最小的,但其响应速度过慢,并且会产生超调;
(3)递归互补滑模的控制性能是均衡的,可以满足音圈电机的工作性能。
