巷道掘进用悬臂式掘进机智能控制平台研究
2022-09-25钱虹光
钱虹光
(华晋焦煤有限责任公司沙曲二号煤矿安监处,山西 柳林 033300)
引言
煤矿井下综掘工作面使用的掘进机以悬臂式掘进机为主,如EBZ160、EBZ220、EBZ450 等,控制系统核心都采用可编程逻辑控制器并扩展所需的功能模块完成对掘进机的方向、截割、位姿等控制[1]。为适应综掘工作面智能化、信息化开采需要,国内外煤矿科研院所和单位针对悬臂式掘进机控制平台进行优化设计,选用EPEC 控制器取代传统的西门子S7-200 PLC 控制器,降低了硬件接线复杂度以及维护维修成本[2];采用模块化、标准化设计理念,基于倍福控制器实现了掘进机控制平台的优化设计[3],降低了开发周期,提升了掘进机的控制性能;基于PCC、智能控制以及CAN 总线通信技术实现了掘进机沿轨迹截割以及自适应截割的功能,提升了掘进机的智能化水平[4]。三一公司的掘进机控制平台采用KW-MultiProg 软件PLC 控制器进行二次开发,将控制掘进机截割路径、位姿变化、行走等的控制算法嵌入掘进机底层算法库,优化了掘进机控制平台性能。文章基于Inter-Control 控制器,实现悬臂式掘进机控制平台的优化设计。
1 系统设计
悬臂式掘进机控制平台系统设计如图1 所示,核心为InterControl 控制器,并由扩展的数字量输入接口、模拟量输入接口、PWM接口以及通信接口共同完成掘进机控制功能。该掘进机为四回路掘进机,包含转载电机回路、泵站电机回路、低速截割电机回路、高速截割电机回路,对应由接触器KM1-MK4 控制高压供电,由TA1~TA4 以及电流变送器1~4 实时监测输入电流值。控制平台需能近距离或者远距离完成掘进机悬臂伸缩、悬臂升降、悬臂摆动动作;使得掘进机截割头能够按轨迹、自适应、自动完成截割任务;同时还能够控制掘进机左右履带行走,及完成前进、后退、停止等动作;当左右履带张紧力不够时,能够通过履带张紧装置完成履带张紧动作。为能够准确、实时的掌握掘进机运行状态,以CAN 总线通信模式与工业交换机、工业显示器、本安操作箱、遥控接收器等设备连接,完成掘进机控制平台的实时监测、精准控制。
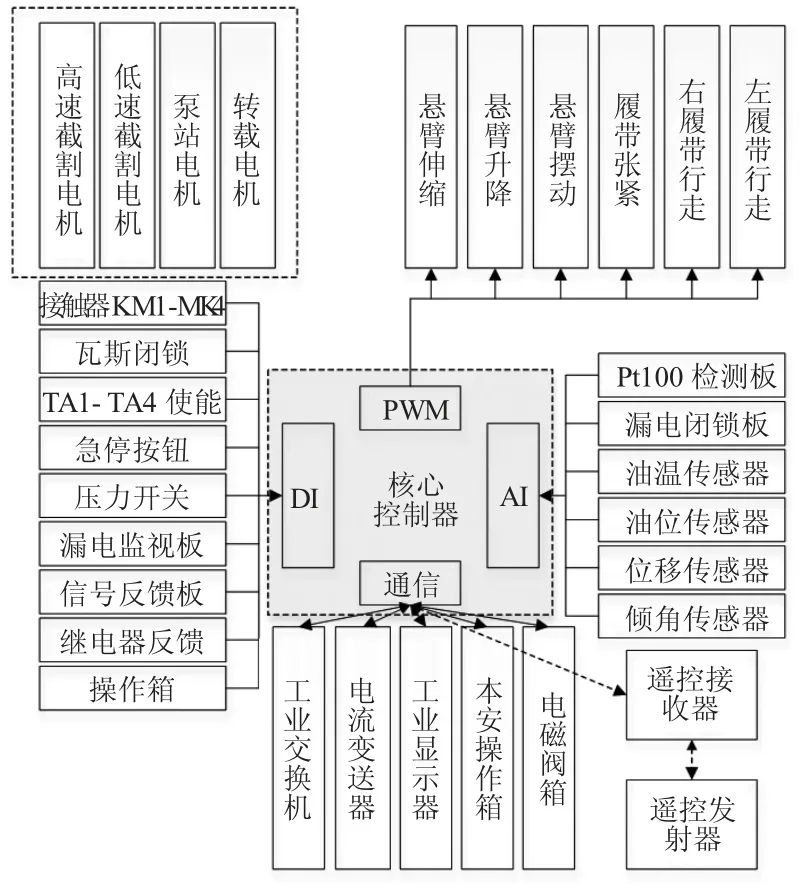
图1 悬臂式掘进机控制平台系统设计
悬臂式掘进机控制平台既可以通过本安操作箱以有线方式完成控制,也可以通过遥控设备完成近距离、远距离无线遥控,遥控控制原理如下页图2 所示。当进行悬臂式掘进机近距离或者远距离遥控时,遥控发射器发出控制命令后,遥控接收器完成接收并进行信号转换,传送至系统核心处理器,经滤波、降噪、逻辑分析后传送至掘进机制动机构驱动掘进机,同时在工业显示屏上显示掘进机控制状态。

图2 悬臂式掘进机无线遥控原理框图
2 硬件设计
悬臂式掘进机控制平台硬件设计部分的重点是控制器,在选择控制器时需综合考虑控制器性能,如系统响应时间、处理速度、支持的通信模式、支持的DI/DO/AI/AO 等。经综合考虑,悬臂式掘进机控制平台核心CPU 选用InterControl 控制器,该控制器具备8 路PWM 信号处理接口、32 路可复用的输入/输出接口,同时具备CAN 总线、CanOpen 总线、TCP/IP 等多种通信接口,满足掘进机控制平台硬件需求。该控制器内核为英飞凌的TC1796 32 位CPU,响应频率为150 MHz,数据处理周期(MIPS)为195,满足掘进机控制平台控制精度需求。以四回路悬臂式掘进机控制平台为例,InterControl 控制器接口分配方案如表1 所示。

表1 四回路悬臂式掘进机控制平台硬件地址分配
3 软件设计
根据悬臂式掘进机控制平台系统设计以及硬件地址分配进行软件系统设计,根据控制平台需完成的功能,将软件系统分为过程初始化及自检模块、保护模块、截割控制模块、机身位姿控制模块、远/近距离控制模块、惯性导航模块以及故障报警模块。保护模块用于实现对掘进机系统的保护,如漏电闭锁、过载、过流、过热、接触器粘连、过压/欠压、瓦斯超限、急停以及油温油位保护等;截割控制模块用于实现对掘进机截割头的控制,如截割路径规划、截割闭环控制、自适应截割、截割姿态测量等;机身位姿控制模块用于实现对掘进机机身位置、姿态的自适应调整;惯性导航模块用于定位掘进机的实时位置,为截割控制、机身位姿控制提供精准的位置信息;故障报警模块用于提示并警示掘进机将要或者已经出现的故障,发出声光语音报警。悬臂式掘进机控制平台软件系统基于CodeSys3.5 平台采用ST+结构化编程语言实现,控制平台软件主流程如图3 所示。

图3 悬臂式掘进机控制平台软件流程
4 试验验证
为保证设计的悬臂式掘进机控制平台现场使用的可靠性和安全性,在试验室对设计的控制平台进行模拟试验。根据悬臂式掘进机控制平台要求在试验室进行硬件配置和软件设计,使用的遥控发生器如图4所示,同时搭建完成的操作面板、功能开关、状态指示灯、旋钮等,如图5 所示。

图4 掘进机用遥控发射器

图5 掘进机控制平台试验现场
4.1 远控截割电机电流测试
对掘进机进行远程控制时,核心控制器以控制多路换向阀测试电磁铁线圈电流方式实现对截割电机伸缩、回转控制。通过掘进机控制平台对核心控制器输出的PWM信号等效电流进行实时监测,并使用万用表测量电磁阀回路电流,将时间、电流统计数据记录为下页表2。

表2 掘进机截割电机伸缩、回转电磁阀反馈电流数据
由表2 可知,按照文中方案对掘进机控制平台进行优化后,截割电机回转控制回路、伸缩控制回路的电流值经1 400 s 动态调节后稳定与系统电流设定值相接近,提高了平台对回转、伸缩比例换向阀的控制精度,有利于提升掘进机控制性能。
4.2 遥控装置测试
利用掘进机遥控发射器对掘进机进行遥控控制,分别完成遥控启动或者截割、油泵、除尘等电机;利用遥控手柄控制掘进机前进、后退;验证遥控急停、遥控复位以及语音报警等功能。测试结果表明,掘进机遥控控制效果较好,遥控控制信号稳定。
4.3 其他测试
利用该掘进机控制平台试验,依次完成系统上电、近距离遥控操作、远距离遥控操作、远程操作并试验各操作模式之间的无缝切换;对掘进机截割系统进行轨迹跟踪试验、自动截割试验以及自适应截割试验;对掘进机机身位姿进行自适应调整试验;设计运载电机回路漏电闭锁故障,触发故障报警模块进行声光语音报警;使用遥控器摇杆控制掘进机左右履带进行前进、后退以及转向试验。试验结果表明,优化后的掘进机控制平台运行稳定,较好的实现了对掘进机的远程遥控以及就地控制。
5 结论
以四回路悬臂式掘进机为研究对象,对原控制平台系统进行优化设计,并得出以下结论:
1)以InterControl 控制器为核心,通过PWM接口直接对掘进机的悬臂升降、悬臂摆动、悬臂伸缩以及履带行走进行控制,缩短了系统响应时间,提升了控制平台的控制精度;
2)利用遥控接收器、遥控发射器实现了掘进机远距离、近距离直接控制,控制效果良好;
3)基于CodeSys3.5 平台实现了掘进机控制平台的软件设计,并可在线实时升级,降低了研发成本,缩短了研发周期。