优化ORB 特征的视觉SLAM
2019-04-26赵永达
文/赵永达
同步定位与地图构建(Simultaneous Localization And Mapping,即SLAM)最早在1988年被提出。随着SLAM 技术的发展涌现了大量的优秀成果,如:基于半直接法的视觉slam 算法SVO 和基于特征点法的ORBSLAM。其中,SVO 在梯度变化不明显的区域效果很差,且容易受到光照的影响。ORBSLAM 鲁棒性相对较好,但误匹配的存在依然对系统准确性有较大影响。因此,本文采用重定位的方法,优化关键特征。
1 算法简介
基于深度相机ORB 重优化SLAM 方法:首先获取视觉传感器数据,包括颜色信息和深度信息,并对彩色图像提取关键特征;然后,采用重定位的方式再次优化关键特征;最后,通过PNP 算法与g2o 重优化结合的方法估计相机的位姿变化,筛选关键帧,并进行闭环检测,得到全局优化位姿,拼接点云形成地图。
2 ORB特征研究
对图像提取关键点以及跟踪,依据跟踪到的的特征点的变化,用于估计相机的位姿变化。目前常用的特征点提取算法有SIFT 算法、SUFT 算法、ORB 算法三种。SIFT 算法和SURF 算法在提取特征点时计算量大,影响系统的实时性,现在通常使用ORB 算法提取图像特征,ORB 算法可以快速的提取特征。
使用ORB 算法提取关键特征,但由于提取ORB 特征的过程中,没有考虑到关键点的灰度值以及深度信息,因此会产生以误匹配。
3 位姿重迭代的研究
对关键特征,本文中采用两次g2o 与PnP结合估计最优位姿,分别用于去除误匹配特征和位姿优化。过程如下:
(1)构建误差函数,其中K 为相机内参,ξ 为相机的位姿

(2)采用图优化(g2o)的方式估计位姿,估计位姿的变化为ξ*;
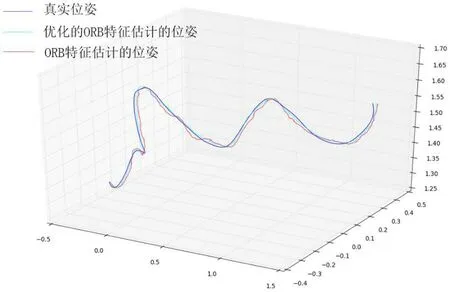
图1:位姿估计结果
(3)对于每一个特征点对,利用估计的位姿变化结果,与前后特征值信息,对于满足的特征点对,丢弃。
(4)根据优化后的关键特征,采用g2o与PnP 结合的方法估计最优位姿。
4 实验结果分析
本文实验采用TUM 标准数据集中基于Kinect 视觉传感器室内数据包进行测试。本实验运行在Ubuntu14.04 系统上,配置为包括4核型号为Intel(R)Core(TM)i5-5200U 的处理器,以及8GB 的内存和Intel(R) HD Graphics 5500 的显卡。
本文首先提取ORB 特征,并进行特征匹配。分别用ORB 关键特征、以及优化后的ORB 关键特征估计位姿变化,并记录估计结果。部分估计结果如图1所示,图中蓝色为相机的真实空间位置,红色为使用没有优化的关键特征的位姿估计结果,绿色的线是依据优化后关键特征估计的位姿结果。
5 结束语
通过实验可以看出,使用优化后的ORB特征估计的位姿,更接近相机的真实位置。并且将关键特征重定位优化以后,再估计位姿的方法稳定性更好。
