一种适用于高速公路的车辆智能雾灯设计
2022-09-24王新月于宏博付皓天王嘉曦孙博宇王宪彬
王新月 于宏博 付皓天 王嘉曦 孙博宇 王宪彬
(东北林业大学交通学院 黑龙江哈尔滨 150040)
汽车问世后,恶劣天气下的行车安全一直是人们十分关注的话题。低能见度天气就是一种常见的恶劣天气,车辆在这种环境下行驶时极易发生交通事故。如在大雨、雾等极易产生低能见度天气的情况下,交通事故的发生率是平时的5倍[1]。因此,我国规定,在高速公路上行车时,如果遇到低能见度天气,驾驶人需在环境能见度低于200m时开启车辆雾灯,车辆之间需要保持安全车距和安全车速[2]。但是,当今社会上有很多驾驶人在低能见度环境下行车时不及时开启雾灯。王畅[3]等人通过调查发现在能见度低于200m 的高速公路上,仅有不足10%的车辆开启了雾灯。显然,这种行为会引起极大的交通安全隐患。同时,Caro[4]等发现驾驶员在浓雾环境行驶时会无意识地缩短跟车距离。以上研究结果说明,低能见度环境下的高速公路追尾事故发生的风险较大。因此,基于图像识别,设计一款在高速公路低能见度下行车时可自动开启并在危险跟车距离下警示后车的车辆智能雾灯是十分有必要的,其不仅有助于提高驾驶人在高速公路下行车的安全性和舒适性,减少低能见度环境下交通事故的发生,还可以很好地降低传统车辆雾灯的主观随意性,简化驾驶人的操作。
1 研究现状
目前,已有一些学者提出了车辆智能雾灯的设计和研究。张金军[5]提出了一种前雾灯能够在夜间车辆转弯时自动开启并实现辅助照明的设计,该设计中的前雾灯不能够在低能见度下开启和警示,所要达到的效果与本设计不同。刘璐、徐祖泽[6-7]等人所研究的车辆智能照明系统中,分别使用DHT11温湿度传感器和颗粒传感器来检测外界雾天环境,从而实现车辆雾灯的自动开启,但是这两种检测的方式对能见度的检测精确不够灵敏和精确,不能够达到准确检测的效果。李伟东[8]提出了一种基于图像识别检测前方车辆的动态来判断能见度的雾灯自动开启装置;玉雄侯[9]提出了一种基于机器学习通过检测前方能见度图像来控制车辆雾灯的自动开启。上述两种智能雾灯均实现了利用图像识别技术对低能见度环境的检测从而控制雾灯的开启,但两种智能雾灯均没有闪烁后雾灯警示后车的功能,可能有后车追尾的风险。
2 整体方案设计
2.1 装置结构
车辆智能雾灯主要由3 个部分组成,其中包括外界环境检测部分、控制部分、雾灯部分。车辆智能雾灯的装置结构如图1所示。外界环境检测部的主要负责外界环境信息的检测和收集。控制部分主要负责对所收集到的环境信息进行处理、判断和识别,从而发送相关指令,实现对下一部分的控制,该部分的核心是运行在内部的计算机视觉程序,是实现该装置中图像识别的重要内容。雾灯部分是由车辆前后两组雾灯组成,得到控制部分发送的指令后,可实现发光和闪烁两种功能。
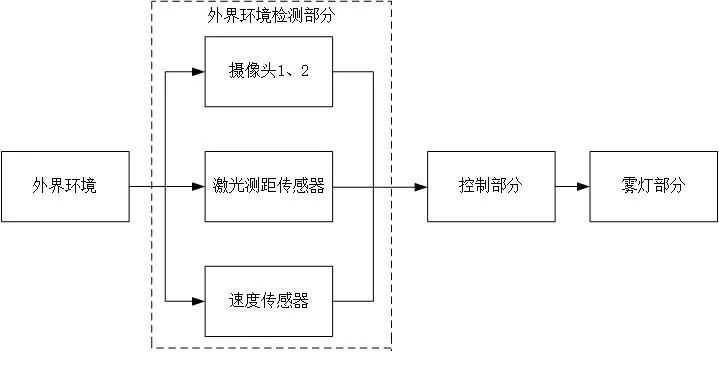
图1 车辆智能雾灯的装置组成
2.2 硬件设计
2.2.1 树莓派
本设计选取树莓派(Raspberry Pi)4B 主板作为控制部分的核心模块,对所获取的图像信息进行处理和识别,并将识别后的结果转变为电平信号输出,从而实现对雾灯的控制。
2.2.2 摄像头
本设计选用树莓派专用的500 万像素摄像头,分别安装于车前和车后,获取能见度信息和车辆后方信息。
2.2.3 测距传感器
该车辆智能雾灯需要在雾、霾、雨、雪等低能见度环境下使用,因此,应用于本设计的测距传感器应具有响应快、方向性好、干扰小、测量范围广的特点。通过对多种测距传感器进行对比,最终选择激光测距传感器作为本设计的测距模块。将激光测距传感器安装于车辆后端,获取后车的距离信息,并将信息传输至控制部分。
2.2.4 发光模块
区别于传统雾灯所使用的卤素灯,该设计选用LED 灯管作为雾灯的发光模块,可以有效地节省车辆的电力资源,并且不会过度产生光污染,在达到所希望的亮度的前提下,能够节约资源,实现保护环境的效果。
2.3 关键技术
车辆智能雾灯所使用的主要关键技术是基于深度学习的图像识别技术,包括外界环境的能见度识别和车辆识别均使用该技术来实现。卷积神经网络作为深度学习的主要算法之一,已经在智能交通的图像识别领域有了很好的应用效果[10]。因此,此设计使用卷积神经网络作为基于深度学习的能见度识别部分和车辆识别部分的主要算法[11-12],并选用计算消耗小、运行速度快而且可以在移动端应用场景发挥很好的作用的Efficient Net网络模型作为主要学习模型。
3 功能实现
车辆智能雾灯能够实现两种功能,具体如下。
(1)该车辆智能雾灯通入电源后,自动开始收集并识别前方道路环境,当前方道路环境处于低能见度环境下时,其自动开启。
(2)该智能雾灯开启后,自主检测后方是否有车辆,当后方有车辆时,通过对后车的跟车距离和实时车速的综合分析,并根据不同的能见度选择后雾灯闪烁策略,给予后车警示。
两种功能实现的工作原理如下。车辆智能雾灯利用控制部分启用安装于车辆前方的摄像头1,该摄像头1 将拍摄到的前方图像再次反馈至控制部分,控制部分利用计算机视觉判断外界环境的能见度情况,随后将识别出的环境能见度情况与4个能见度等级进行匹配。其中,根据我国在高速公路上的雾灯使用规范及车辆安全车距和车速的规定[2],本装置将能见度级别提前预设为4个,分别为极低、低、较低和正常,与可视距离L 的关系如表1 所示。当识别出的道路能见度L 低于200m,即能见度等级为极低、低或较低时,则自动开启车辆的前后雾灯。
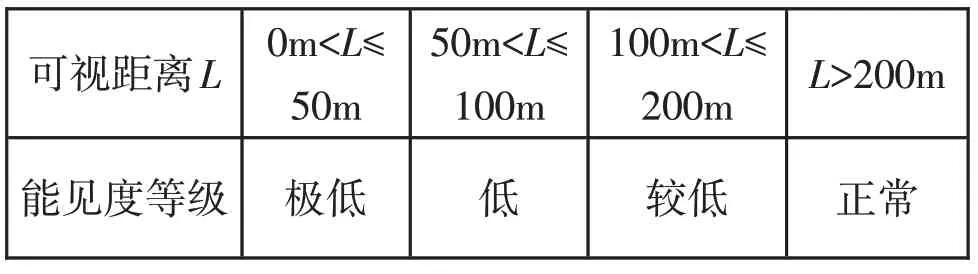
表1 能见度级别和可视距离L 关系表
雾灯开启后,控制部分将启用安装于车辆后方的摄像头2,计算机视觉再次对摄像头2所收集的后方图像进行识别,当时识别到后方有车辆时,启用安装在车辆尾部的激光测距传感器进行测距,测量出与后车之间距离的第一个数值后,启用装于本车的速度传感器进行测速,随后,激光测距传感器和速度传感器将同时以时间间隔T的检测速度为来进行收集,最后,将所测得的后车的跟车距离和本车的速度进行综合计算,得到后车的速度。后车速度计算公式为(其中,假设传感器收集的时间间隔T足够短):
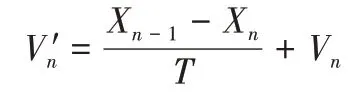
此时,得到了第n次测得的后车跟车距离、本车速度、后车速度及道路能见度后,将这些数值与后雾灯闪烁策略进行比对。美国国家公路与运输工作者协会(AASHTO)利用停车视距模型建立了道路能见度、车辆速度和车距三者之间的关系[13],以上述关系为基础,并结合我国高速公路低能见度行车规定[2],车辆智能雾灯预设了后雾灯闪烁策略,如表2所示。
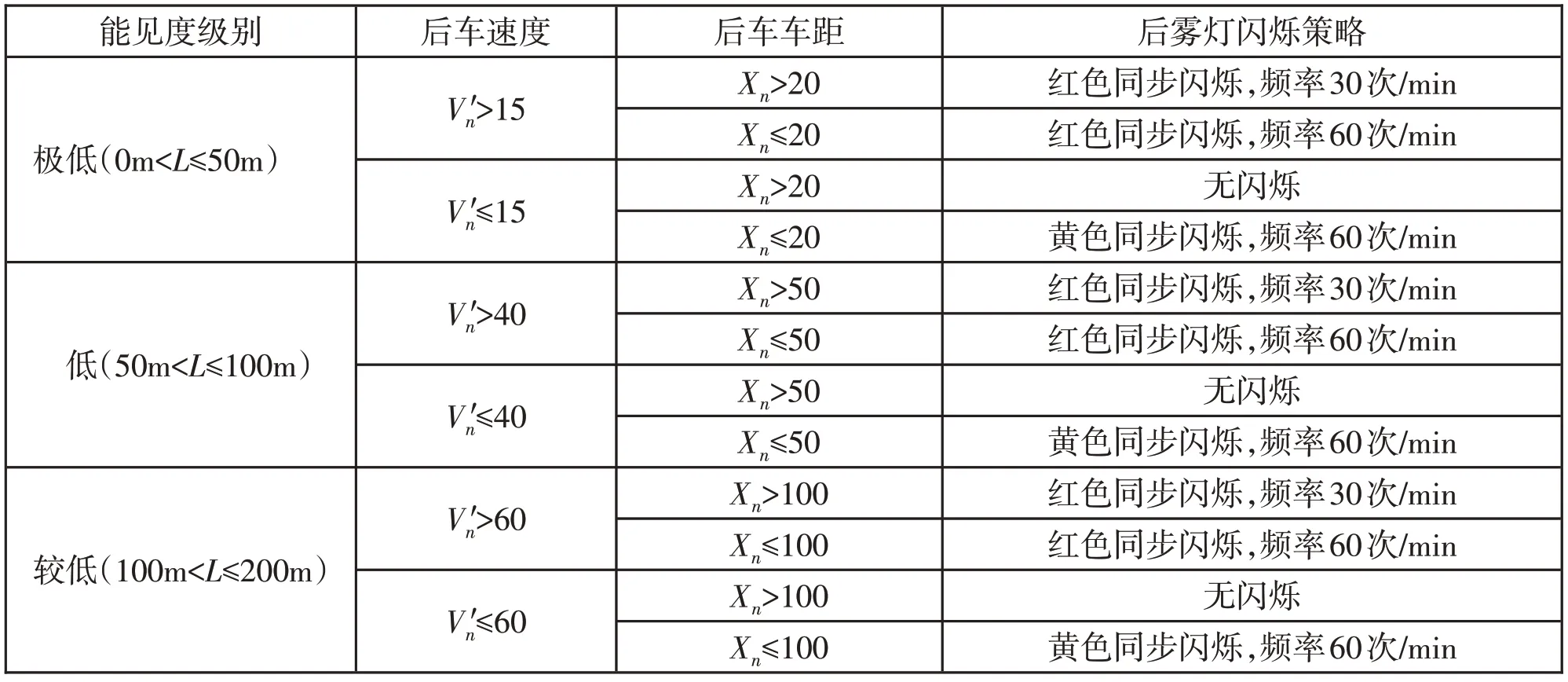
表2 后雾灯闪烁策略表
4 软件设计
Open CV可以给该装置的软件部分设计提供很好的函数和算法支撑[14],选择Raspbian 作为本次树莓派的操作系统,该车辆智能雾灯总体流程设计图如图2所示。
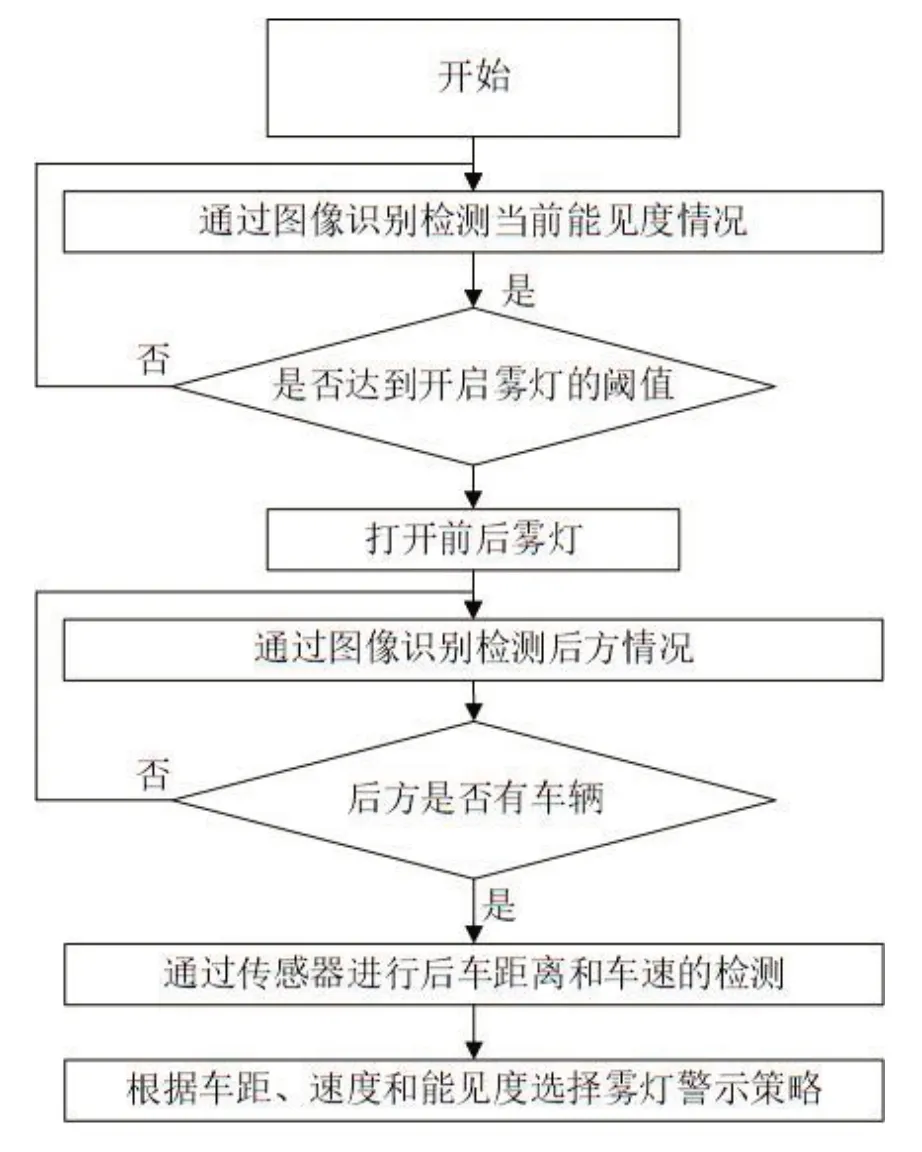
图2 车辆智能雾灯总体流程设计图
5 装置优势
区别于传统的雾灯,上述设计的车辆智能雾灯具有以下优势。
5.1 功能优势
该装置充分运用图像识别技术和深度学习算法完成对低能见度环境的准确检测,使车辆雾灯在低能见度下可代替手动开启,达到自动开启的效果,既保证了驾驶员的行车安全,同时也有效地降低了因驾驶员不及时开启雾灯所导致的交通事故发生率。同时,该装置也充分地考虑到了低能见度天气追尾事故的多发性和严重性,给予了后雾灯在不同能见度下的警示策略,使后车可以更加容易地发现和注意本车,同时,提醒后车控制行车距离,有效地降低了低能见度环境下高速公路追尾事故的发生率。
5.2 技术优势
该装置所使用的核心技术是基于深度学习的图像识别技术,其作为图像识别领域的新兴技术,可达到较高的识别准确率,同时也具有更细化的图像分类能力,从而实现了该装置的不同能见度的细分及更准确的车辆识别效果。
5.3 环境优势
该装置顺应了国家对环境保护方面的要求,将LED 灯管作为雾灯部分的发光模块,可以实现以更少的电量达到相同的发光效果,减少了电能的消耗和光源的污染,在环境保护方面有着相对优势。
6 结语
发展智能交通和改善交通安全作为交通运输行业的热点话题一直以来都备受关注。本文便结合该热点话题,基于当下高速公路复杂的交通环境和出行现状,提出了一种适用于高速公路的车辆智能雾灯的设计方案,该设计方案结合图像识别技术,以多个传感器和计算机视觉为工具,对外界能见度环境和后车的跟车情况进行了全方位的检测和判断,最终实现了智能雾灯的自动开启和警示。该车辆智能雾灯可以有效地发挥其功能,给予消费者更加安全、舒适的驾驶环境,极大程度地降低低能见度天气下交通事故的发生率。