基于自适应阻抗控制的智能心肺复苏机设计*
2022-09-22周宇飞宋丽珍朱明超
李 杨,王 瑞,周宇飞,何 行,宋丽珍,朱明超
(1.中国科学院 长春光学精密机械与物理研究所,吉林 长春 130033;2.中国科学院大学,北京 100049;3. 吉林大学第一医院 二部急诊科,吉林 长春 130031)
0 引 言
心脏骤停,是一种常见的危重疾病,表现为心脏停止跳动,造成血液在人体的循环中断。心脏停止向全身泵血,会对人体的重要器官造成缺氧性损伤,严重威胁生命安全。在出现心脏骤停时,如果能及时对患者进行心肺复苏,帮助患者恢复自主心跳,就能有效挽救患者生命[1]。
心肺复苏方法可以使患者的身体在出现心跳骤停后,维持一定程度的血液循环。完整的心肺复苏包括胸外按压、人工呼吸和电击除颤三部分。其中,胸外按压是最重要的环节。相关资料表明,即使对心脏骤停的患者只进行胸外按压,心肺复苏的效果依然显著[2]。胸外按压可以促使人体体内血液流向全身的器官,《国际心肺复苏指南》建议,胸外按压深度应大于5 cm,以保证血液流动的效果。但是,医护人员在徒手进行胸外按压时,经常会因为体能原因,使按压深度、持续时间和频率得不到保证;在进行人工呼吸时,还要承担传染病的风险;转移的过程中,又会出现中断等意外情况,难以在抢救过程中实现高质量的胸外按压[3]。
综上所述,设计一款代替人手进行胸外按压的装置,可以避免徒手按压的缺点。现阶段,自动胸外按压设备主要分为气动式和电动式两大类。
萨博(Thumper)心肺复苏机是应用较广的一款气动式心肺复苏机,它根据气压传动的基本原理来设计,采用压缩的空气或氧气为动力源(通常会使用医用氧气瓶),使用单片机控制电磁阀的开关,驱动机械活塞装置往复运动,以进行胸外按压[4]。其按压深度可调节,范围为0~7 cm;并可以按照一定按压-通气比进行按压。此类装置通常存在运动控制差、摩擦生热的缺点,并且需要配备相应的气源才能实施心肺复苏。
Autopulse束带式胸外按压器[5]是由美国卓尔公司设计研发的。它由背部固定板和绑带两部分组成,在工作原理上突破了以往心肺复苏机单点式按压的工作模式,使用时根据患者体型调节绑带的尺寸,用带状的气囊环绕患者胸部,使压力可以在整个胸腔上得到均匀的分布。在工作时,按压器位于背板的电机将绑带按照设定的频率进行收紧和放松,对胸部轮廓进行挤压。
卢卡斯(LUCAS)[6]心肺复苏机是一款根据《国际心肺复苏指南》设计的电驱动心肺复苏装置,截至2016年已有三代产品。它以直流电机为动力源,采用直流电源供电和电池供电两种供电方式,能保证复苏机长时间的连续工作。其按压深度为4 cm~5 cm,按压频率为100 times/min,能按照连续按压和通气比按压两种模式来运行。
我国心肺复苏机的研发起步较晚[7]。蓝仕威克MCPR-100和苏邦MSCPR-1A型心肺复苏机是两款应用较广的气动心肺复苏机,后者与萨博的设计较为相似。天津普瑞FSJ-20B型心肺复苏机是一款电动型心肺复苏机,内置了空气压缩机,解决了气源的供应问题;后续天津普瑞又研发了FSJ-20C型,该型号结合单点式按压和束带包裹的按压方式,在国内开创了三维按压的工作模式,并于2018年被科技部收录到创新医疗器械产品目录中。
总体来说,在按压性能的综合表现上,电驱动式心肺复苏机要优于气动式,但是目前的诸多产品只能按照开启时设定的频率和深度执行按压,不能做到因人而异,面对不同病人的情况不能做出有利于抢救的调整—如在病人胸骨韧性较好时可以通过加大按压深度,提升胸外按压的效果。并且,面对按压过程中可能出现的骨折、气胸等情况,也没有相应的监测措施。因此,心肺复苏机不仅需要代替人手进行按压,还需要进一步提高按压的质量,并保证其安全性。
张广[8]设计了一种闭环自动胸外按压系统,综合考虑了血流灌注和骨折风险,在机械按压的过程中调节按压深度,提升了心肺复苏的成功率。
不同于其他机械式心肺复苏机,笔者设计一款心肺复苏机,按照制定的医疗策略来规划按压流程,进一步提高抢救的成功率。
考虑到机械装置的持续按压对胸腔和器官造成的损伤,笔者利用阻抗控制对按压头的运动进行规划,即在按压深度较深、反弹力较大时体现出柔顺性,减少对胸腔的伤害,进一步降低骨折风险。
1 心肺复苏机传动结构设计
智能心肺复苏机传动部分装配图如图1所示。
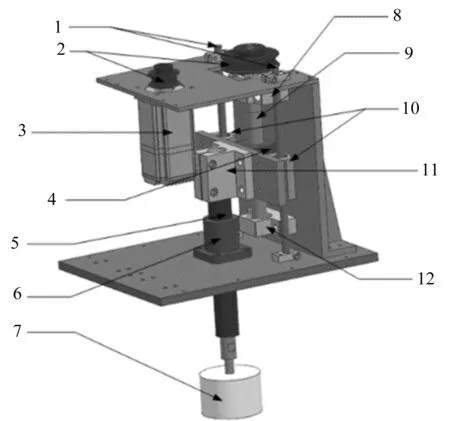
图1 心肺复苏机传动部分装配图1—直杆型导向轴;2—大、小同步带轮;3—伺服电机;4—滚珠丝杠螺母座;5—按压轴;6—直线轴承;7—一维力传感器(按压头);8—固定侧丝杠支座;9—滚珠丝杠;10—箱式直线轴承;11—支柱固定夹;12—支撑侧丝杠支座
图1中,心肺复苏机传动部分主要包括:伺服电机、滚珠丝杠、同步带轮、直线轴承等。
笔者设计的心肺复苏机采用电驱动的方式,选择了伺服电机作为动力源。
心肺复苏机在运行时,对进给速度、平稳性和响应速度有较高的要求,而滚珠丝杠具有传动比精确、传动稳定、传动效率高、能实现急速翻转等优点[9],故使用滚珠丝杠作为传动机构,将电机的正/反旋转运动转化为螺母的上/下往复运动。
电机轴与滚珠丝杠之间使用同步带轮传动。预选滚珠丝杠导程L=10 mm/r,有效行程Y=70 mm,丝杠直径D=15 mm,基本额定动载荷5.5 kN。滚珠丝杠螺母在竖直方向上有旋转运动的趋势,使用直线导轨与直线轴承配合工装板来加以限制;由螺母带动按压头实现胸外按压,按压头末端安装了一维力传感器,用于反馈按压过程中力变化的情况。
2 阻抗控制与按压运动规划
2.1 阻抗控制
阻抗控制是1984年由HOGAN N提出的[10]。阻抗控制常用于机械臂的力/位置控制中。它面对不同的环境能表现出良好的鲁棒性。BA Kai-xian[11]采用了一种新型阻抗控制方法,解决了由于负载力瞬间力控制与位置控制切换引起的机械仿生腿运动失速问题。SANTOS W D[12]设计了一种阻抗控制器,利用机械腿对神经受损的患者进行腿部康复训练。PENG Jin-zhu[13]设计了一种改进的阻抗控制器,该控制器在机械手与环境接触时,能快速消除力的跟踪误差,得到满意的力跟踪效果。
在机械臂执行任务时,特别是在与环境有接触的情况下,阻抗控制能实现一定的柔顺性。对于胸外按压这一动作而言,要提高安全性和舒适性,就要让按压动作在胸骨的弹力面前表现出一定的屈服性。给阻抗控制系统输入一个力/位置的信号,就会输出相应的运动。
阻抗控制系统具有阻抗和导纳两种特性,当按压头末端有位置偏差时,阻抗特性会产生力或者力矩的输出;而导纳特性则会通过末端的作用力来产生位置信息。
其过程框图,即阻抗导纳特性示意如图2所示。
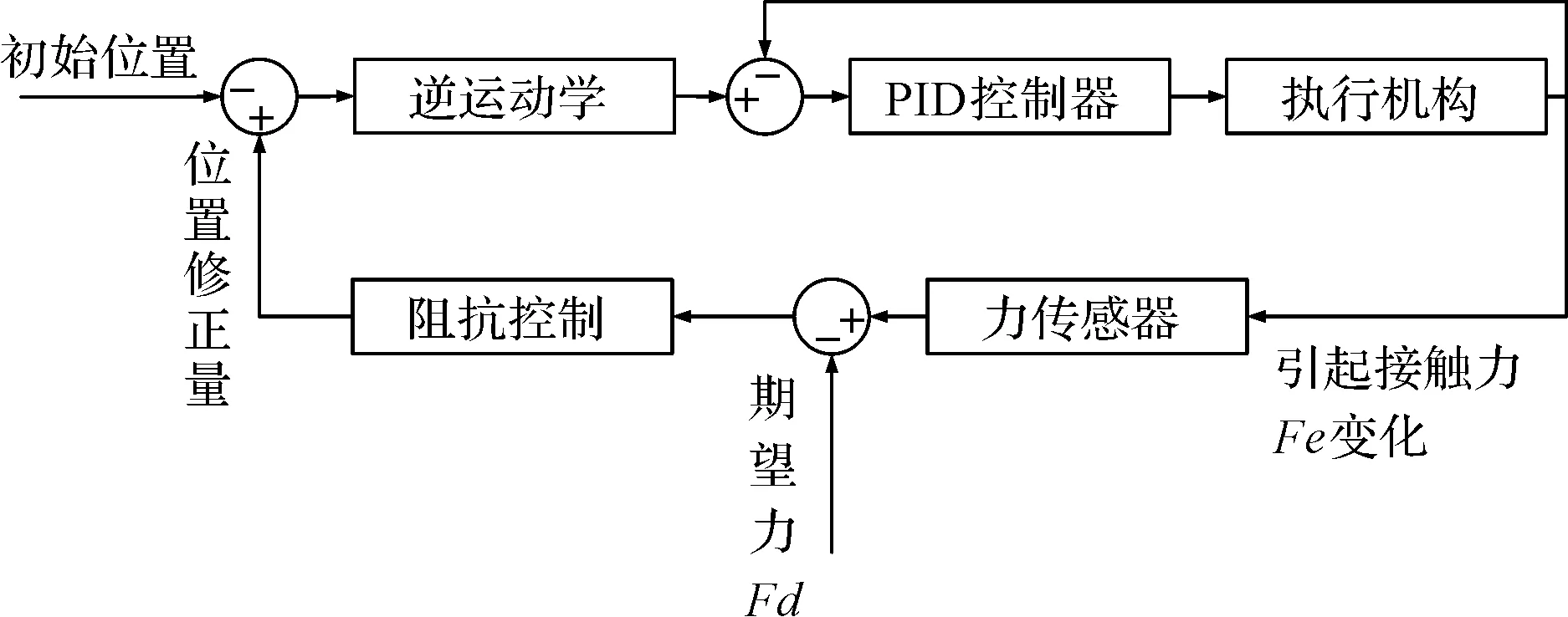
图2 阻抗的导纳特性示意
将阻抗控制应用在心肺复苏机中,可以将被伺服电机控制的按压头看作一个由质量、阻尼和弹簧构成的系统,在自由按压过程中(未与胸腔接触),加速度、速度和位置的变化会产生力的变化,其动力学方程表示为:

(1)

阻抗控制可以将按压头在按压过程中的位置与环境力作为一个整体来考虑,通过阻抗模型,计算按压过程中环境力的误差和位置误差的关系,调节按压头末端的位置与力的动态关系,以实现力/位置控制。在按压头与胸腔接触时,按压头不再是自由运动,而需考虑胸腔环境。
可以将胸腔视为一个由弹簧和阻尼构成的系统,如图3所示。
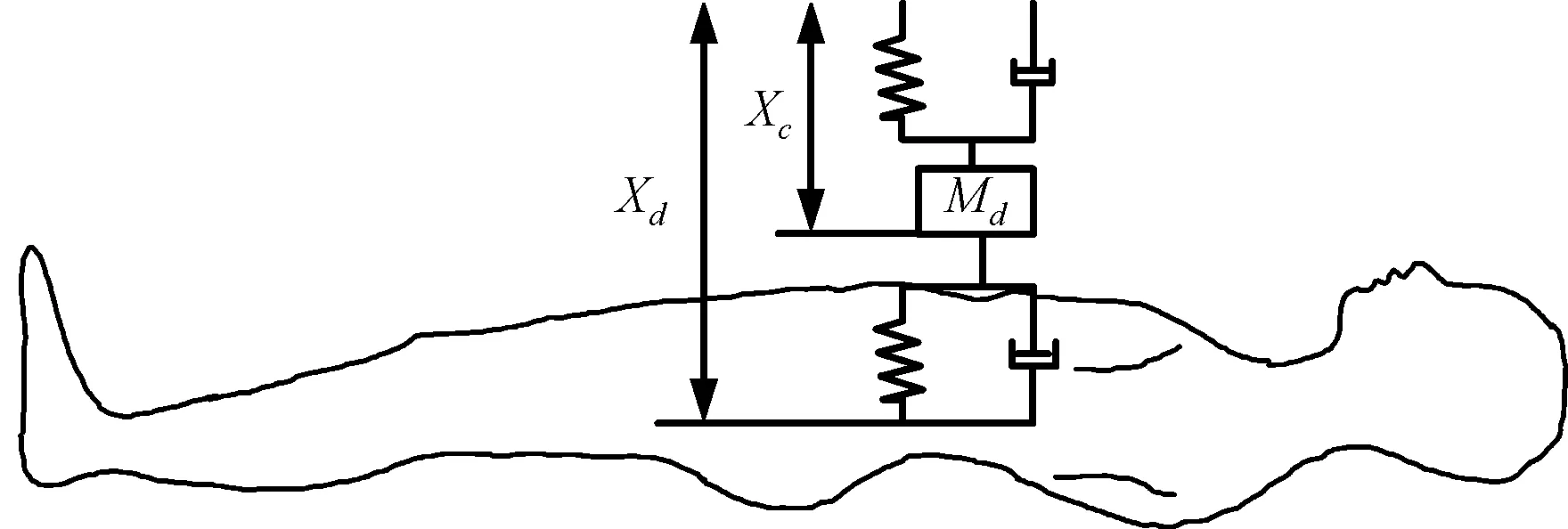
图3 阻抗模型与人体胸腔环境示意图Xc—按压头的实时位置;Xd—期望位置
阻抗控制的导纳特性,表达了实际接触力和位置误差之间的关系。为了利用阻抗控制的导纳特性,实现对力/位置的跟踪,此处引入一个参考力Fd,与力传感器反馈的环境力Fe相减,获得力的误差ΔF=Fe-Fd,从而得到新的阻抗模型表达式,即:
(2)
式中:md—阻抗模型的惯性参数;bd—阻尼参数;kd—刚度参数。
引入位置误差E,即:
E=Xc-Xd
(3)
进行拉普拉斯变换,得到频率域的表达式为:
(4)
对其进行双线性变换,即:
(5)
得到的离散表达式为:
(6)
式中:T—采样周期;ω1—二次项系数;ω2—一次项系数;ω3—常数项。
ω1,ω2,ω3表达式分别为:
ω1=4md+2bdT+kdT2
(7)
ω2=2kdT2-8md
(8)
ω3=kdT2+4md-2bdT
(9)
为方便由计算机实现,进一步得到阻抗控制的差分方程为:
E(n)=ω1[F(n)T2+2T2F(n-1)+
T2F(n-2)-ω2E(n-1)-ω3E(n-2)]
(10)
2.2 基于阻抗控制的按压运动规划
一个完整的胸外按压周期为600 ms,如图4所示。
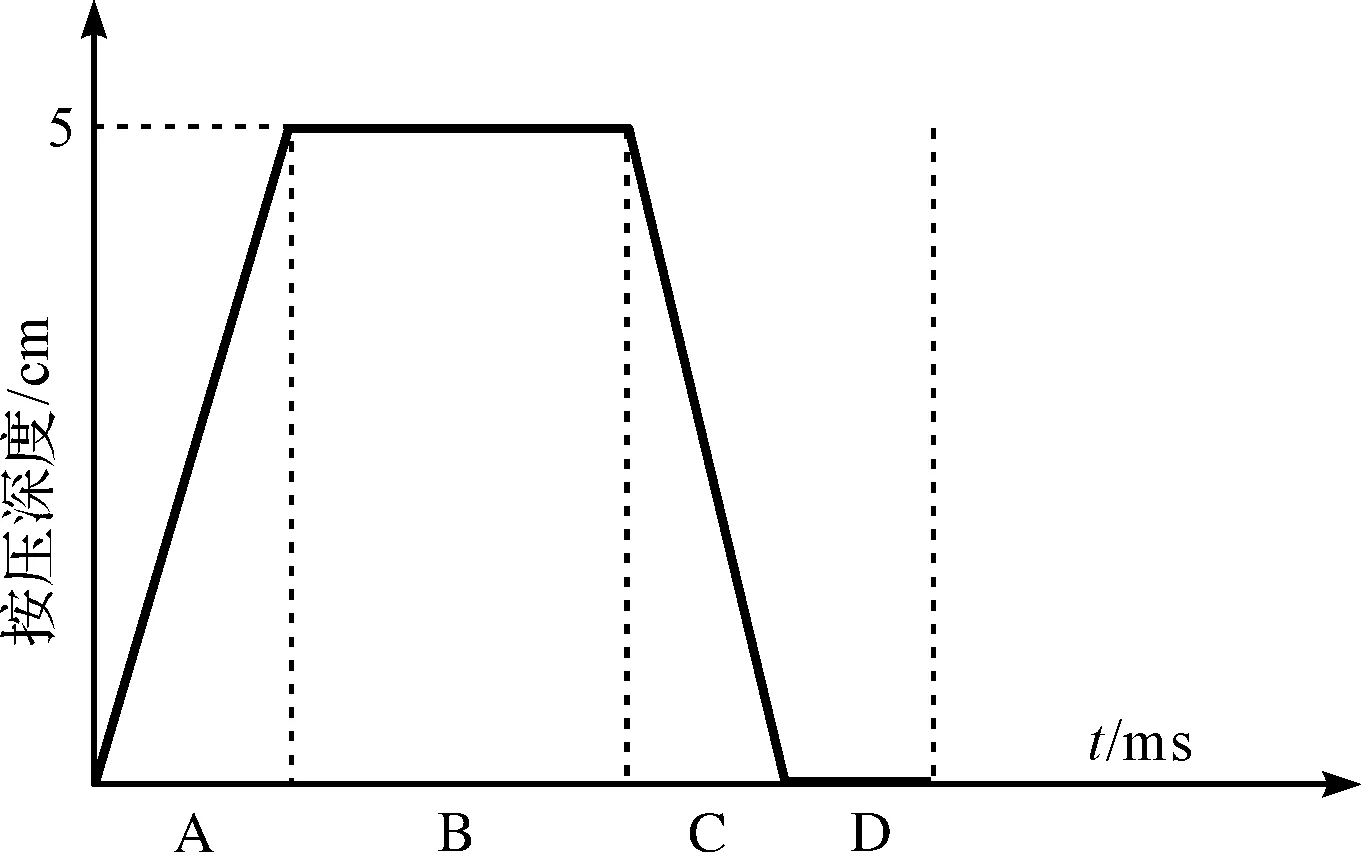
图4 胸外按压单位周期的流程A—向下按压;B—保持;C—向上提升;D—保持
图4中,在理想状态下,4个阶段的持续时间按顺序依次为120 ms、180 ms、120 ms和180 ms。
但是,电机在实际运动时,由于负载的原因,无法严格按照理想按压流程进行启停转换,需要根据实际情况调整电机的工作流程。
考虑到胸外按压的关键要素为按压深度和频率,因此,只需要保证在开始的300 ms内完成向下按压,并且在后300 ms内完成复位即可。
为研究阻抗参数对运动规划的影响,笔者采用了控制变量法,依次调整调整阻抗模型的md,bd,kd。
进行仿真实验后,结果如图(5~7)所示。其中,改变md对响应曲线的影响如图5所示。

图5 改变md对响应曲线的影响
改变bd对响应曲线的影响如图6所示。
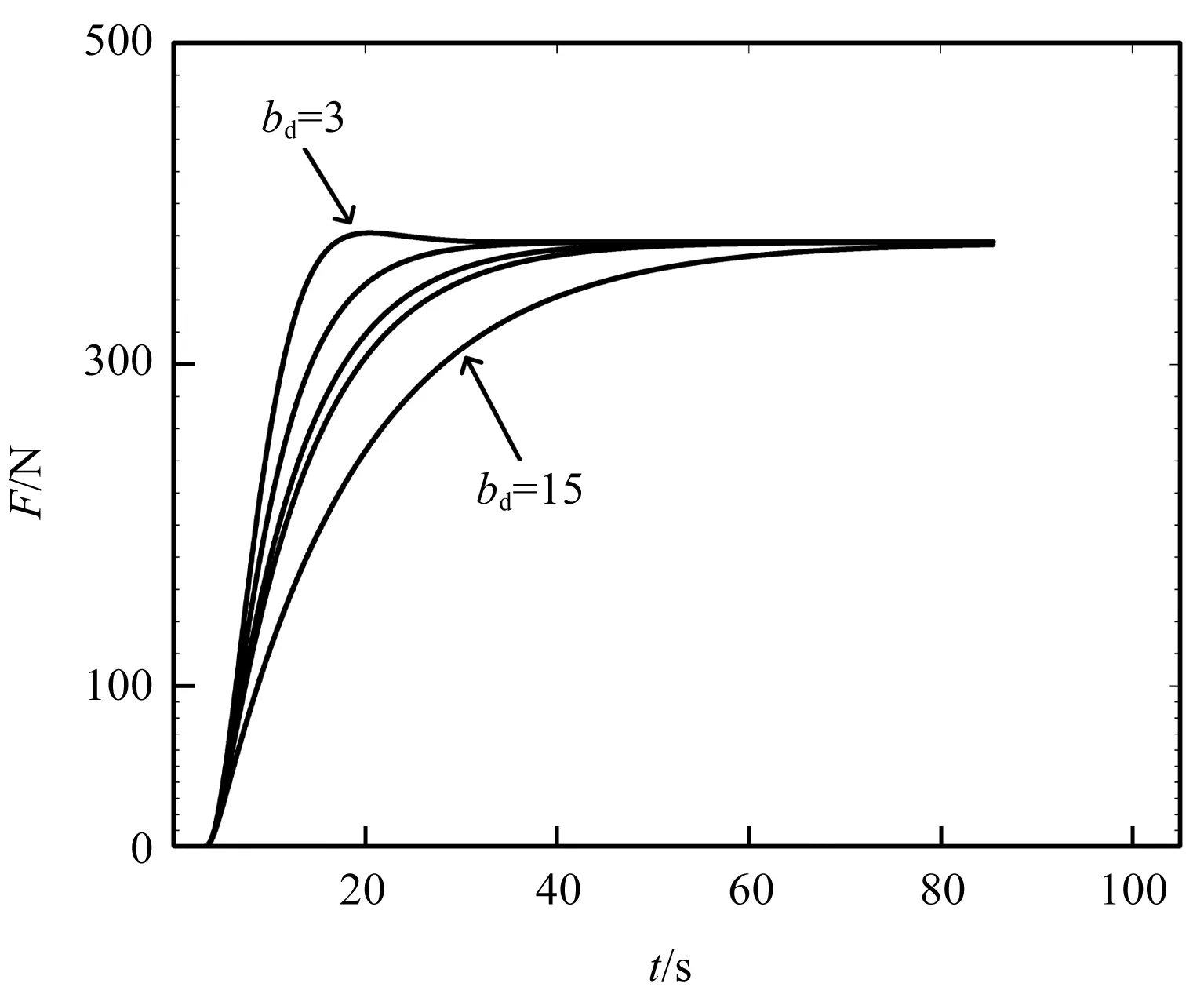
图6 改变bd对响应曲线的影响
改变kd对响应曲线的影响如图7所示。
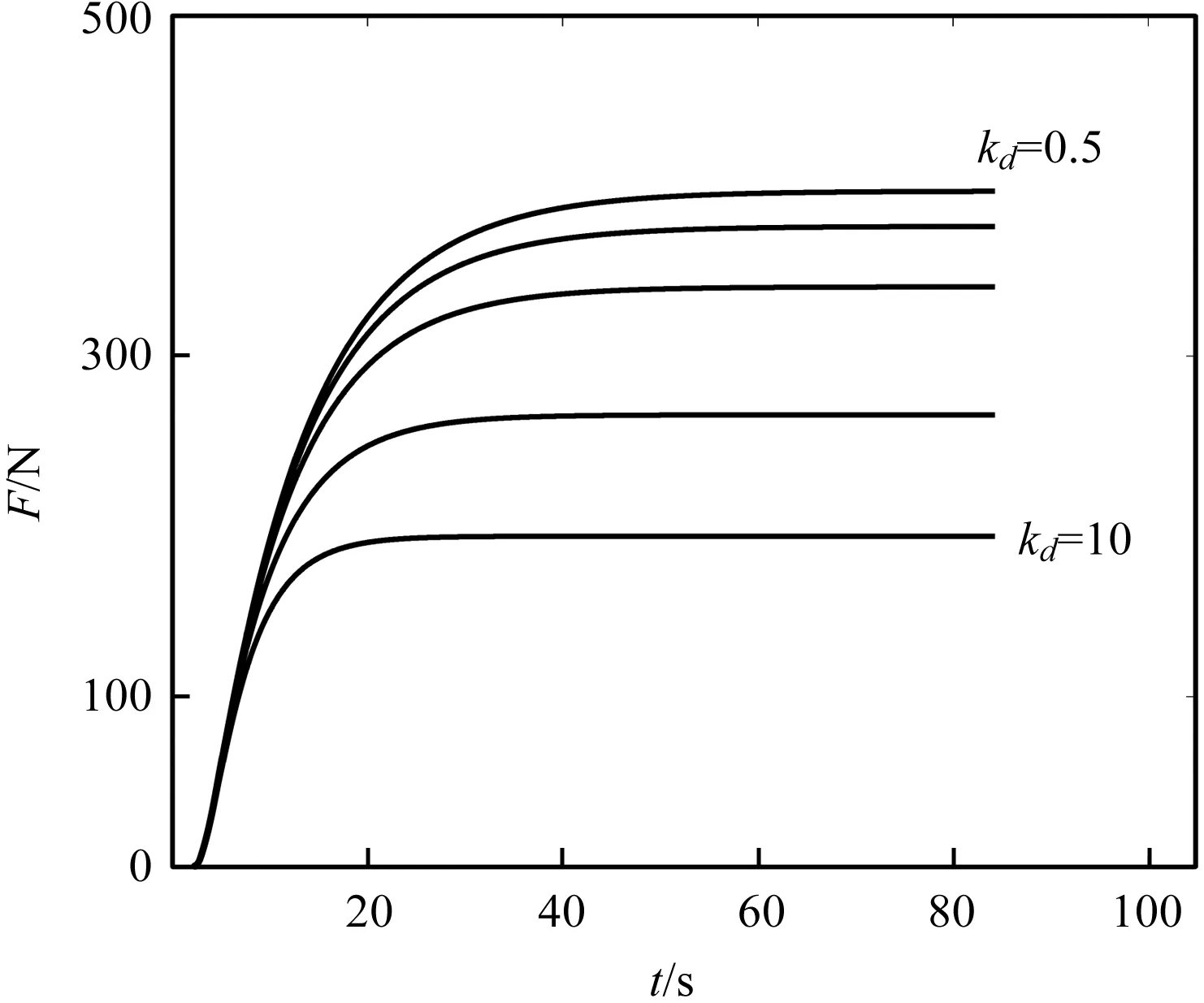
图7 改变kd对响应曲线的影响
由图(5~7)可知:md的增大会导致响应速度的减小;且其增大到一定程度后,开始出现超调,到达稳定的时间也越来越长;bd对响应速度的影响较大,响应时间则随着bd的增大而增大;而kd主要影响的是稳态值,随着kd的增大,稳态值逐渐变小。
根据以上分析可得出结论:合理地调整阻抗参数,能够计算出按压头的理想运动轨迹,使心肺复苏机对患者进行安全的按压。
在了解到阻抗参数对响应的影响后,笔者拟根据一定的策略来调节阻抗参数,控制按压头,按照接近理想按压状态的轨迹进行胸外按压,如图8虚线部分所示。

图8 阻抗控制的按压轨迹
3 基于模糊控制的阻抗控制器设计
3.1 阻抗参数的调整
根据《国际心肺复苏指南》的建议,标准的胸外按压深度应在5 cm~7 cm之间,按压频率为100 times/min~120 times/min。
为满足按压频率和深度的要求,在累积的仿真经验基础上,利用心肺复苏机和医用人体模型经多次实验摸索,通过试凑法得到了最优的质量参数md和阻尼参数bd的值,使响应时间符合标准按压频率,之后根据一定的策略来调整刚度参数kd,控制按压深度和力度。
固定理想参数后,调整刚度参数kd得到的实际轨迹如图9所示。
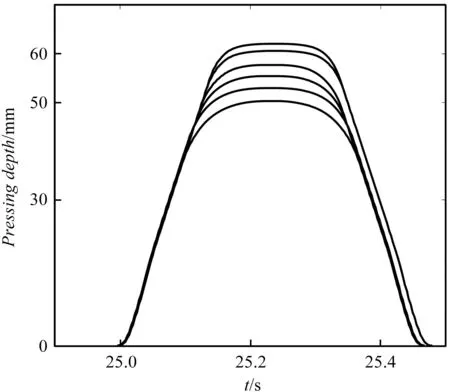
图9 不同刚度参数kd的按压轨迹(一个周期)
由图9可以看出:刚度参数kd的改变对按压深度改变较大,但是按压周期基本保持不变。
根据对实验数据的统计,在不断改变刚度参数kd的情况下,任意一次按压的周期可以控制在590 ms~610 ms,即按压频率保持在98.4 times/min和101 times/min之间,与标准按压频率基本一致。
在进行胸外按压时,按压深度越深,血流灌注全身情况越好,但是发生骨折的风险也越高。所以,需制定相应的策略来调整刚度参数kd,让心肺复苏机在面对不同的患者时,规划出不同的按压运动,这样既能提升血流灌注程度,又能避免骨折;同时阻抗控制的参与能让按压头在胸骨反弹力较大时,表现出屈服性,以进一步减轻按压对患者的伤害。
3.2 策略调整
心脏泵血量,可以最直接地衡量血流灌注程度。根据王灿[14]的调查研究,准确的心输出量检测需要在病人情况稳定时,或者有专业仪器的情况下进行,有的方法还会造成创口,不适应于急救过程。
相关研究结果表明:呼气末二氧化碳分压(PETCO2)与血液流动情况具有强相关性,且PETCO2的监测对心肺复苏具有指导性作用[15]。因此,国内外众多医疗科研机构将呼气末二氧化碳分压(PETCO2)代替心输出量,以反映当前血流灌注程度的生理指标(Benefit)。
由于在按压过程中会出现胸骨骨折的可能,并且有研究表明,与徒手按压相比,使用机械装置进行按压的骨折率要高出许多,且会对胸腔造成一定程度的损伤[16],所以对骨折风险进行监测规避尤为重要。但目前很少有对胸外按压与骨折风险的研究。在张广的闭环自动胸外按压系统中,将胸骨弹性模量(Kchest)作为骨折风险(Risk)的监测指标,但没有考虑到机械装置的持续按压对胸腔和器官造成的损伤。
笔者通过使用模糊控制器,综合考量血流灌注和骨折风险来调节kd,选取合适的阻尼参数bd控制按压频率,从而实现对不同患者高质量的胸外按压。模糊控制则按照经验来设计,将Benefit与Risk按照医疗经验进行分级作为输入。
Benefit的分级如表1所示。
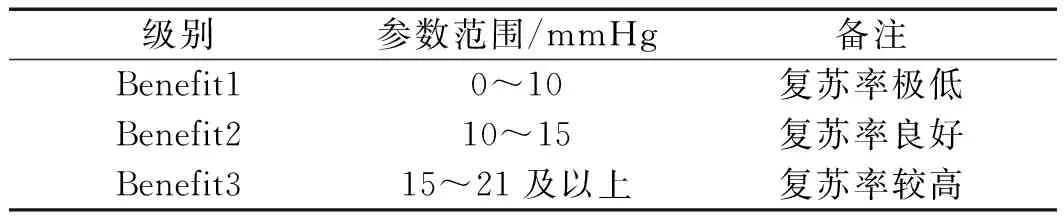
表1 Benefit的分级
Risk的分级如表2所示。
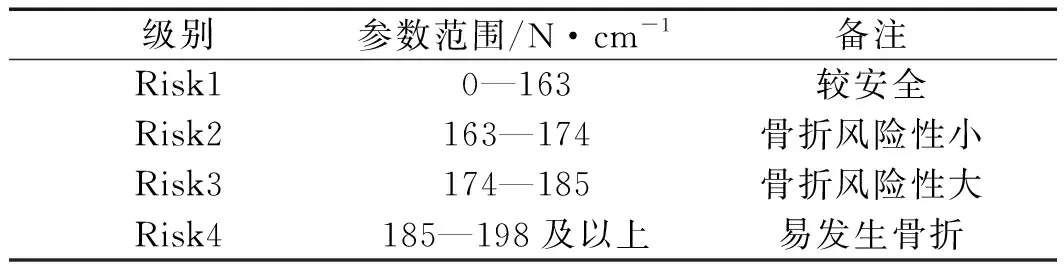
表2 Risk的分级
3.3 模糊控制方案
调试经验设计模糊规则如表3所示。
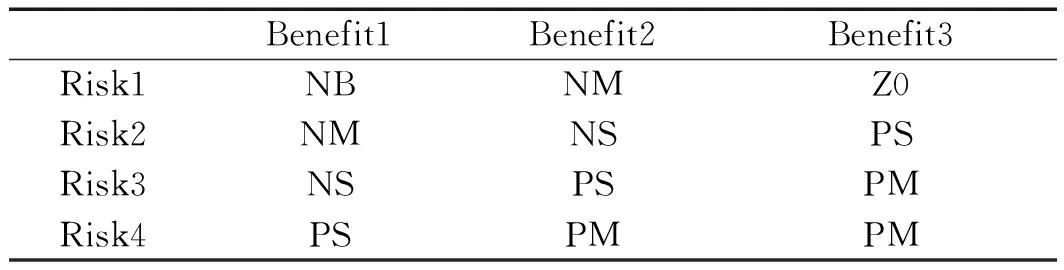
表3 刚度参数Δkd调整规则表
Benefit隶属度函数如图10所示。
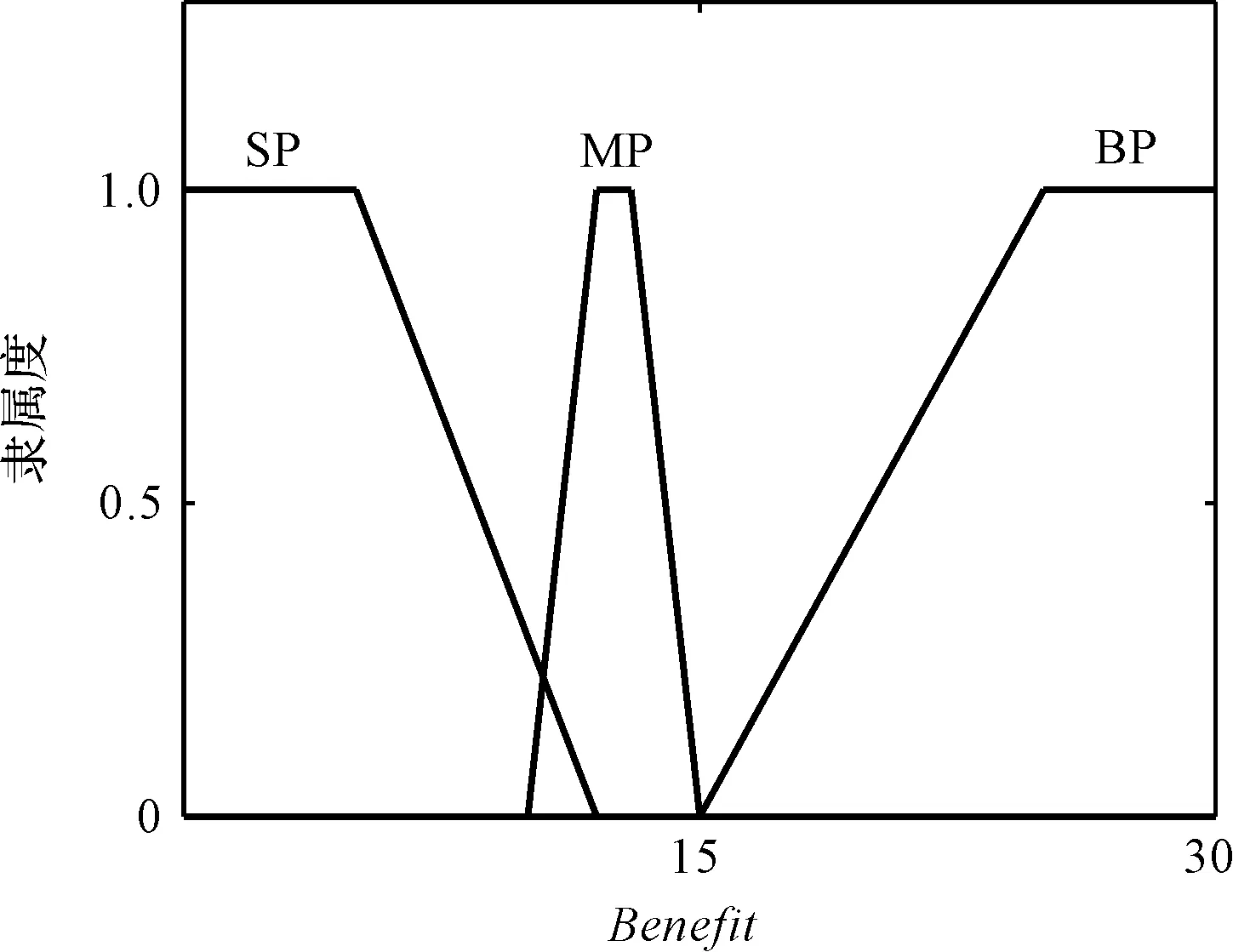
图10 Benefit隶属度函数
Risk隶属度函数如图11所示。

图11 Risk隶属度函数
DeltaK隶属度函数如图12所示。
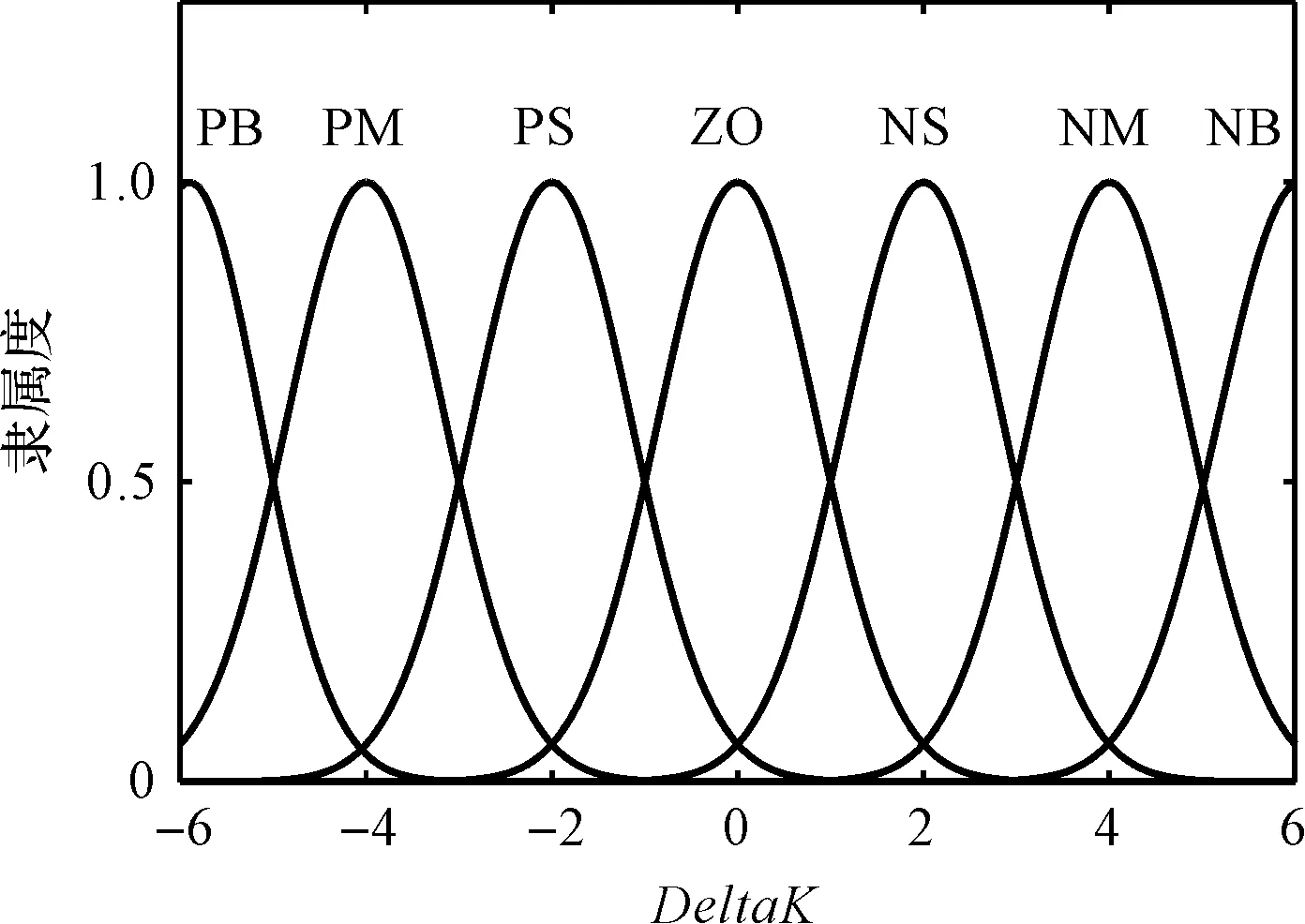
图12 DeltaK隶属度函数
笔者根据调试经验设计模糊规则(表3)和隶属度函数(图(10~12)),计算出刚度参数kd的变化量Δkd,进而通过阻抗控制器,计算出按压头的运动轨迹。
模糊控制需要根据设计者的经验来设计隶属度函数和调整规则。
以图10的SP为例,当PETCO2低于5 mmHg时,认为此时的复苏率极低,故与Benefit1的隶属度为1;随着PETCO2的上升,与Benefit2的隶属度逐渐升高,在PETCO2大于10 mmHg时,与Benefit1的隶属度为0。Risk的设计规则同上。DeltaK的隶属度函数设计主要依靠调试经验。
模糊控制改变阻抗模型参数的流程图如图13所示。
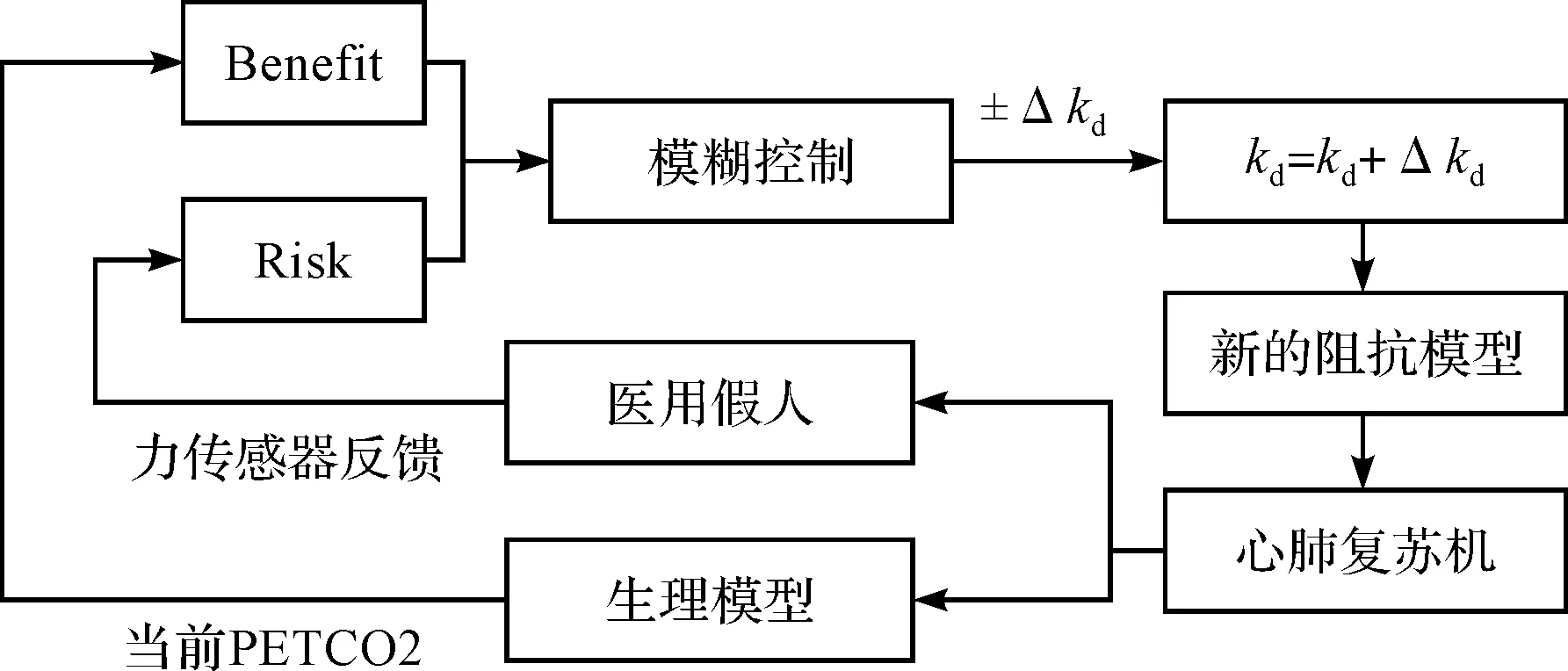
图13 模糊控制改变阻抗模型流程图
由图13可知:在该次按压结束后,PETCO2和骨折风险分别影响下一次按压深度和力度,而模糊控制会根据PETCO2和骨折风险,计算出刚度参数kd的改变量Δkd,生成新的阻抗模型,以此来规划下一次的按压运动。
根据阻抗控制的特性,按压的深度和力度只需要改变kd就能实现混合控制。
4 实验与结果分析
4.1 实验平台设计
为了验证智能心肺复苏机的效果,笔者根据以上研究和已有的硬件条件,搭建半物理实验平台。平台主要由工控机、心肺复苏机和医用人体模型3部分组成,如图14所示。
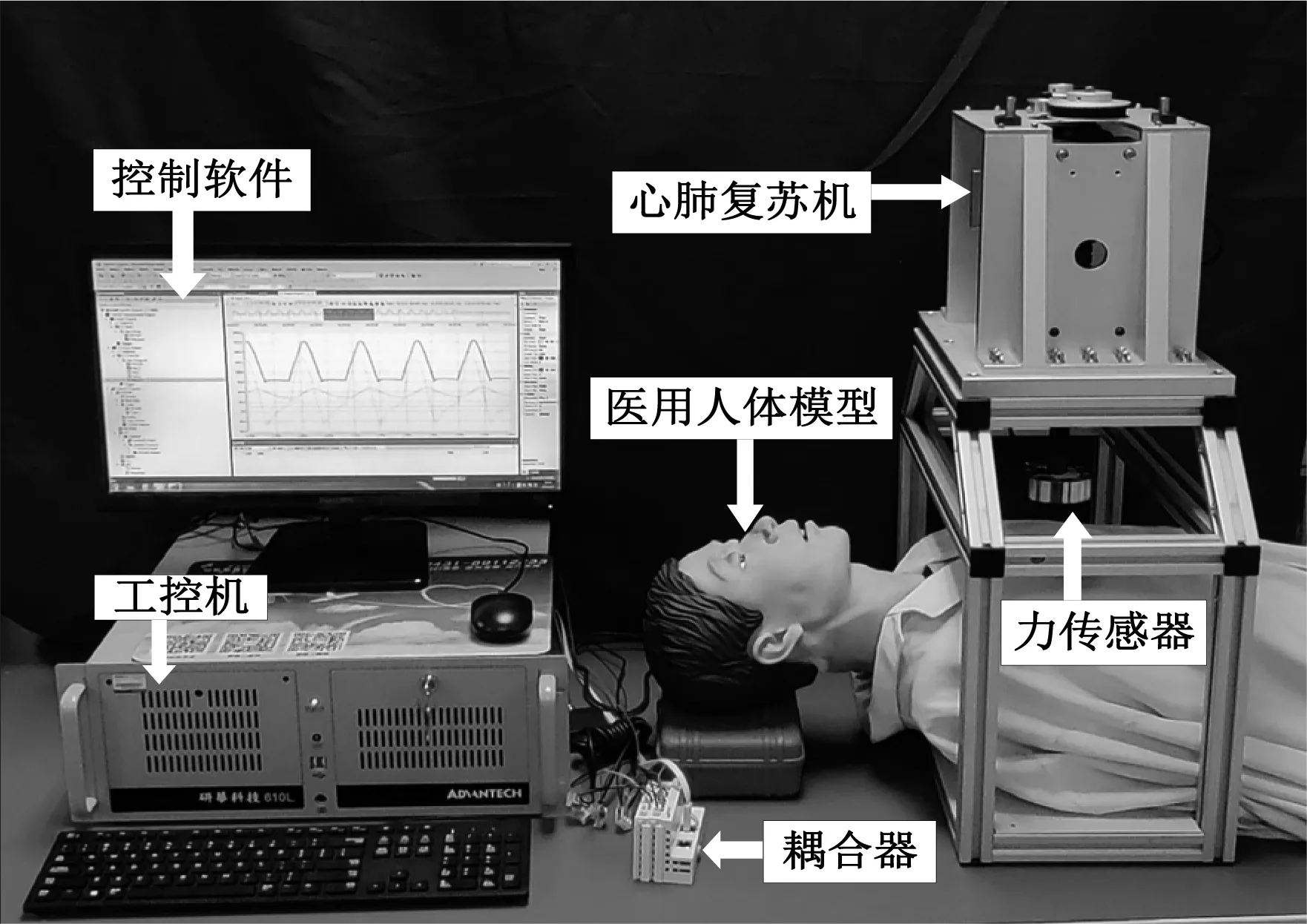
图14 半物理实验平台
网络扩展模块耦合器EK1100通过EtherCAT总线连接力传感器、伺服控制器和工控机。
伺服电机的运动由德国Beckhoff公司的实时控制软件TwinCAT3来进行编程控制,它是一款基于PC端、Windows操作系统的工控软件,具备良好的可视化界面和丰富的功能块。TwinCat3集成于Visual Studio,可以使用C/C++作为实时应用程序的编程语言。
实验采用Charles F. Babbs的人体血液循环模型,输入频率为100 times/min,深度分别为5 cm、5.5 cm、6 cm、6.5 cm的按压曲线,得到按压过程中生理参数的变化,如图15所示。
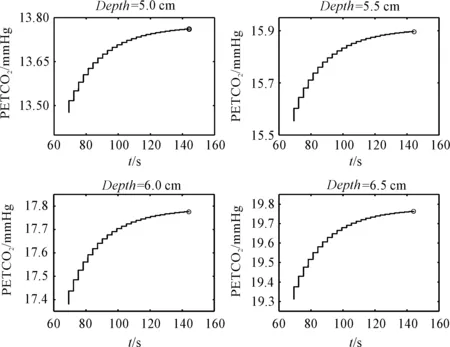
图15 模拟胸外按压PETCO2变化情况
经过验证结果表明,该模型能较好地计算出胸外按压过程中,PETCO2的变化情况,实现对Benefit的监测;利用伺服电机的编码器和心肺复苏机运动机构的传动比,可以计算出胸骨的位移X及力传感器的反馈值F。
计算得到按压时的骨折风险表达式为:
(11)
由此,在实验过程中可实现对Risk的监测。
4.2 基于医用人体模型的半物理实验
为了验证心肺复苏机的效果,笔者使用医用人体模型进行半物理仿真实验。该人体模型根据人体胸腔环境来设计,可以良好地反映出胸腔被按压时的情况。
实验首先对人体模型进行标准按压,采集胸腔位移与压力的信息,将期望力Fd设定为深度为6.5 cm时的压力450 N;之后根据仿真经验和设备的实际运行情况,设定md=0.005,bd=13,初始kd=30;运行设备进行实验。
按压轨迹变化如图16所示。
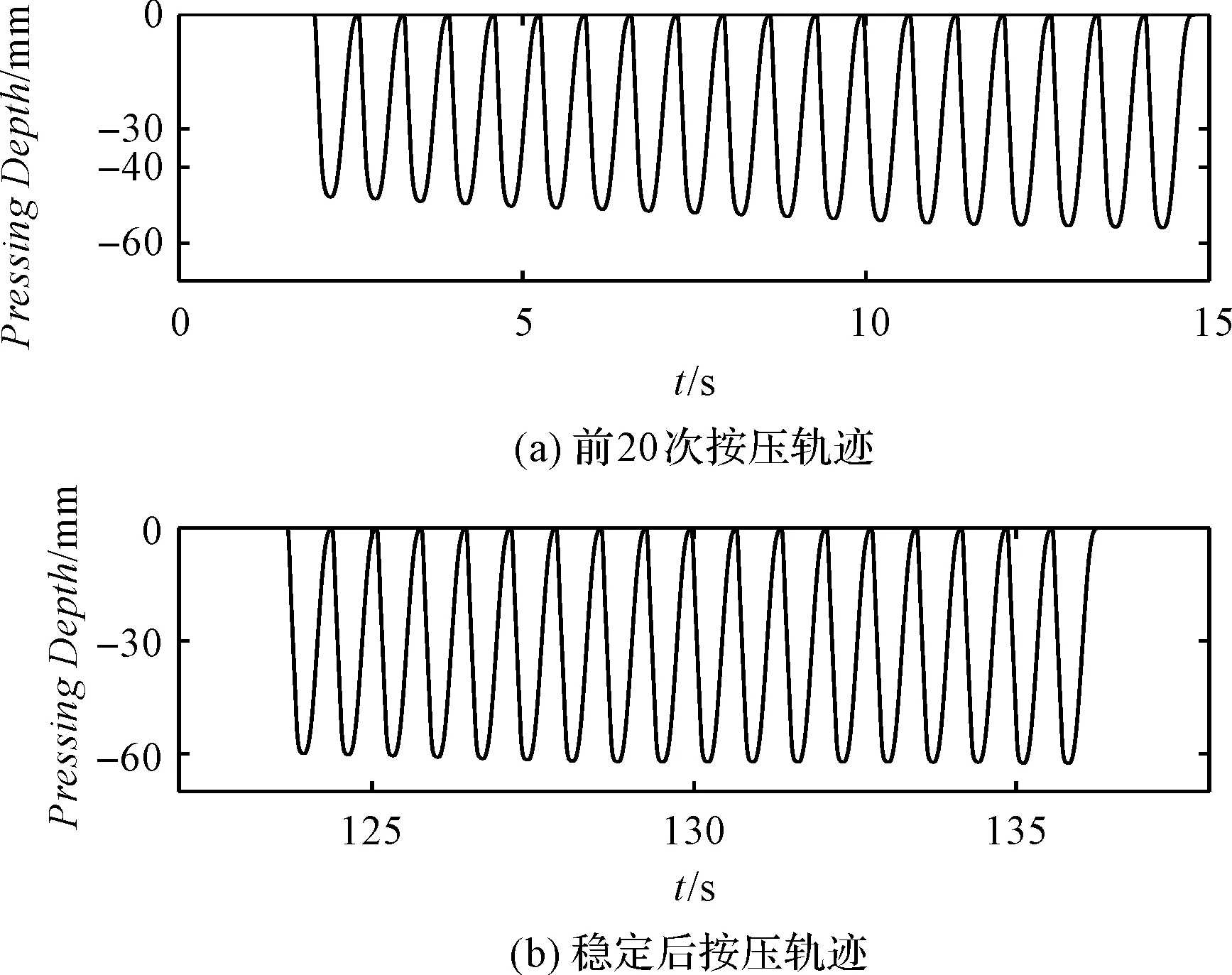
图16 按压轨迹变化
由图16可以看出:在每一次按压结束后,模糊控制器根据当前的情况,输出Δkd对刚度参数kd进行迭代计算,进而使每一次按压深度缓慢加深;实验进行了一段时间后,按压轨迹已基本稳定。
期间刚度参数kd的变化情况如图17所示。
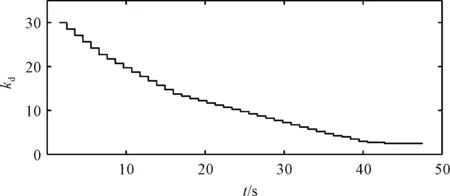
图17 刚度参数kd变化情况
由图17可以看出:在开始按压初期,kd的变化较快,然后逐渐收敛,并稳定在1.2左右。
按压期间Benefit的变化情况与标准按压的对比,如图18所示。
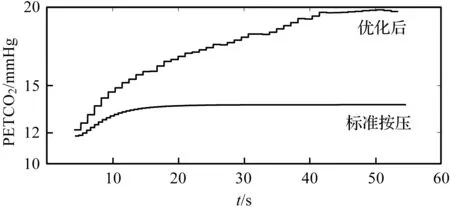
图18 Benefit变化情况
由上述实验可以看出:随着按压的进行,模糊控制器对kd进行调节,使每次的按压深度不断加深,最后趋于稳定;PETCO2逐步升高后也趋于稳定,与固定深度的标准按压相比,调节后的按压带来的收益更大,进一步提高了抢救效率。
为避免按压深度过大造成伤害,需要对最大按压深度进行限制。笔者将实验中的刚度参数kd的最大值限制在30,最小值限制为0.9,这样就将最大按压深度控制在47 mm~65 mm之间。另外,笔者通过心肺复苏机的传动比计算出65 mm对应的编码器码值,一旦超过该数值,视为按压结束,电机将立即转换旋转方向,回归零位。
因为不同患者胸骨的软硬程度不同,笔者对力传感器采集的信号做了1~2.5倍放大处理,用以模拟不同患者的胸部环境。
智能心肺复苏机的优化按压与传统机械按压的数据对比,如表4所示。
由表4可知:随着放大倍数的增大,患者胸部环境变硬,心肺复苏机面对环境变化做出了相应的调整;当放大倍数大于2.5倍时,心肺复苏机为保证按压效果,将按压深度控制在了50 mm左右。

表4 半物理实验结果
当放大倍数为1~2.1倍时,患者胸部环境较软,平均按压深度维持在63 mm~65 mm之间,变化较小,所以未在表4中呈现不同实验环境刚度参数kd的稳态值,如表5所示。

表5 不同实验环境刚度参数kd的稳态值
与标准按压的比较可知,在患者胸骨表现出较好的韧性时,增加按压深度带来的收益要大于骨折风险。因此,阻抗控制规划了比标准按压更大的按压深度,提高了Benefit的水平,促进血液在患者体内的流动,有利于患者恢复自主呼吸的能力。
而标准按压的深度是固定的,按压收益也是固定的;随着胸骨逐渐变硬,按压的风险加大,经阻抗控制规划的胸外按压能综合考虑Benefit和Risk的情况,逐渐减小按压深度;
从胸骨较硬的数据可以看出,在患者胸骨表现出较差的韧性时,经阻抗控制规划的胸外按压不会一味地向骨折风险妥协,能保持一定的按压深度来维持血液在身体里的循环;
并且,从按压运动的轨迹来看,模糊控制可以综合考虑血流灌注和骨折风险来迭代刚度参数kd,缓慢地增加最大按压深度,避免了按压深度突然加大带来的风险;在下压运动的末程,按压的深度较深时,胸骨弹力较大,按压头没有对胸骨继续产生刚性的冲击,而是在胸骨的弹力面前表现出顺应性,减小了进给速度,进一步减小了按压对胸腔的伤害。
5 结束语
笔者针对人工进行胸外按压的弊端,设计了一款智能心肺复苏机,并提出了一种自适应阻抗控制算法,即利用模糊控制,根据患者的PETCO2和潜在骨折风险,对阻抗控制模型进行了调整,进而由阻抗控制规划按压运动;利用医用人体模型和在计算机上搭建的生理数学模型,进行了心肺复苏机的半物理实验。
研究结果表明:
(1)在性能方面,该心肺复苏机能够执行频率为100 times/min,深度为5 cm~6.5 cm的胸外按压;
(2)面对患者胸骨硬度的变化,心肺复苏机表现出了良好的自适应性,调整按压深度和力度,可保证安全性;
(3)相比于传统按压装置,该心肺复苏机能在患者胸骨较软时,进一步促进血液流动,提升患者恢复自主循环的能力。从仿真结果来看,最高可将PETCO2提升4.58 mmHg。
在接下来的工作中,笔者将继续对心肺复苏机的结构进行优化,并且将研究的重点聚焦在心肺复苏机的便携性上,即使用更小、更轻便的控制器或单片机,集成控制代码,对复苏机进行实时控制。
