对向测量皮托管国际比对
2022-09-21杨美昭方立德
杨美昭,张 亮,方立德,王 池
(1.河北大学 质量技术监督学院,河北 保定 071002;2.中国计量科学研究院,北京 100029;3.郑州计量先进技术研究院,河南 郑州 450001)
1 引 言
近年来,温室气体减排受到广泛关注,作为世界上碳排放量最大的国家,中国即将全面启动全国碳交易市场[1,2]。目前我国碳交易市场的核算方法是基于燃料端排放量计算。由于燃料端存在数据质量较差、不确定度较大等不足[3,4],中国电力联合会已经组织起草了电力行业的排放端温室气体排放量核算方法[5]。排放端核算方法使用烟道连续排放监测系统(continuous emission monitoring system,CEMS)测量企业的温室气体排放量[6,7]。为了保证CEMS的测量准确性,根据HJ 75—2017《固定污染源烟气(SO2、NOx、颗粒物)排放连续检测技术规范》[8],每3~6个月需对CEMS进行在线比对校准。根据现行环监标准,通常使用S型皮托管作为流速比对标准器;但S型皮托管的常规测量方法无法识别流速攻角的偏航角和俯仰角,导致测量结果有较大误差[9~11]。
美国环保局(EPA)在方法2G中规定了对S型皮托管的对向测量,此方法能够确定偏航角[12]。Trang N D等在一定雷诺数范围内对S型皮托管流速攻角进行了研究,表明俯仰角在±10°范围内会对测量结果产生较大偏差[13]。方法2F中规定了三维皮托管(球形三维皮托管和棱形三维皮托管)的对向测量,此方法能够确定流速的大小和偏航角、俯仰角[14]。而对于对向测量三维皮托管国内外相关研究则较少。
为了验证不同实验室间皮托管校准系数的一致性,中国计量科学研究院主导开展了对向测量皮托管国际比对。通过中国计量科学研究院(NIM)、美国国家标准与技术研究院(NIST)和韩国标准科学研究院(KRISS)校准结果的分析,验证不同实验室间校准装置和量值的一致性。
2 对向测量皮托管的校准方法
2.1 对向测量S型皮托管的校准方法
2.1.1 S型皮托管
S型皮托管是由2根外形相同的金属管焊接而成,其结构如图1所示。测头上有2个方向相反的开口,2个开口截面互相平行。测量时,正对气流来向的开口称为总压孔A1,背向气流来向的开口称为静压孔A2。
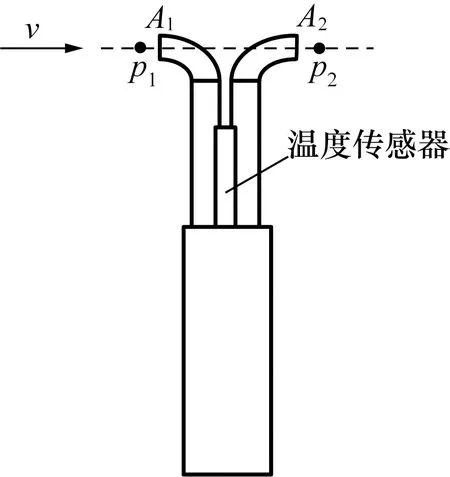
图1 S型皮托管结构示意图Fig.1 S-type pitot tube structure diagram
由于S型皮托管的常规测量方法无法分辨流速的偏航角和俯仰角,经测试在复杂流场中,使用S型皮托管测量轴向流速误差高达30%~50%。
2.1.2 对向测量S型皮托管的校准方法
使用对向测量S型皮托管可以识别流速的偏航角。在测量前需要对S型皮托管的偏航角识别和流速大小测量分别进行校准。
校准前将S型皮托管安装于风洞测试段中心处,其中总压孔A1朝向风洞来流方向,使用水平尺或角度尺调整皮托管,使2个测压孔轴线和风洞测试段管道轴线平行,此时皮托管位于偏航角的参考位置。使用FARO三坐标测量机标定S型皮托管支撑杆轴线与测试段轴线角度,使两者相互垂直。校准流速为5~30 m/s,流速校准点间隔2.5 m/s。在每个流速下顺时针或逆时针旋转S型皮托管使A1、A2孔的差压为零,此位置即为S型皮托管的对向角度(yaw null)。随后将S型皮托管绕支撑杆轴线反向旋转90°,此时皮托管两测压孔轴线相对参考位置的角度θ0,i为该流速下偏航角参考位置偏差,当θ0,i相对参考位置为顺时针偏差量时记为正值,否则为负。在此角度下进行测量,记录差压计示数,按式(1)计算皮托管校准系数K。在不同流速下记录偏航角参考位置偏差,计算偏航角参考位置偏差平均值θ0作为偏航角的修正值,拟合校准系数K与流速校准曲线。
(1)
式中:K为S型皮托管校准系数;vs为风洞测试段标准流速;Δp为p1与p2压差(A1与A2孔间的压差);ρ为风洞测试段空气密度。
2.1.3 对向测量S型皮托管的测量方法
使用对向测量方法时,将S型皮托管安装于被测管道内,通过引压管连接A1,A2孔至压差计的正、负端测压孔,调整S型皮托管,使2个测压孔轴线平行于被测管道轴线,皮托管的A1孔朝向管道上游,通过绕皮托管支撑杆轴线顺时针或逆时针旋转S型皮托管,寻找2个测压孔压差为零的角度,此时流速方向在垂直于S型皮托管测压孔轴线的对称面上。随后将S型皮托管绕支撑杆轴线反向旋转90°记录偏航角θy。从皮托管支撑杆尾部看,当θy相对测试管道轴线为顺时针偏差量时记为正值,否则为负。使用偏航角参考位置偏差θ0对θy进行修正,如式(2)所示:
θy,m=θy-θ0
(2)
在此角度下进行流速大小测量,记录差压计示数,根据式(3)计算测量点的轴向流速:
(3)
式中:θy,m为修正后测量点流速偏航角;θy为偏航角读数值;θ0为偏航角参考位置偏差的修正值;va为测量点轴向流速;ρs为被测管道烟气密度。
2.2 对向测量三维皮托管的校准方法
2.2.1 三维皮托管
三维皮托管的类型多种多样,常见的类型是球形和棱形三维皮托管,其构造如图2所示。
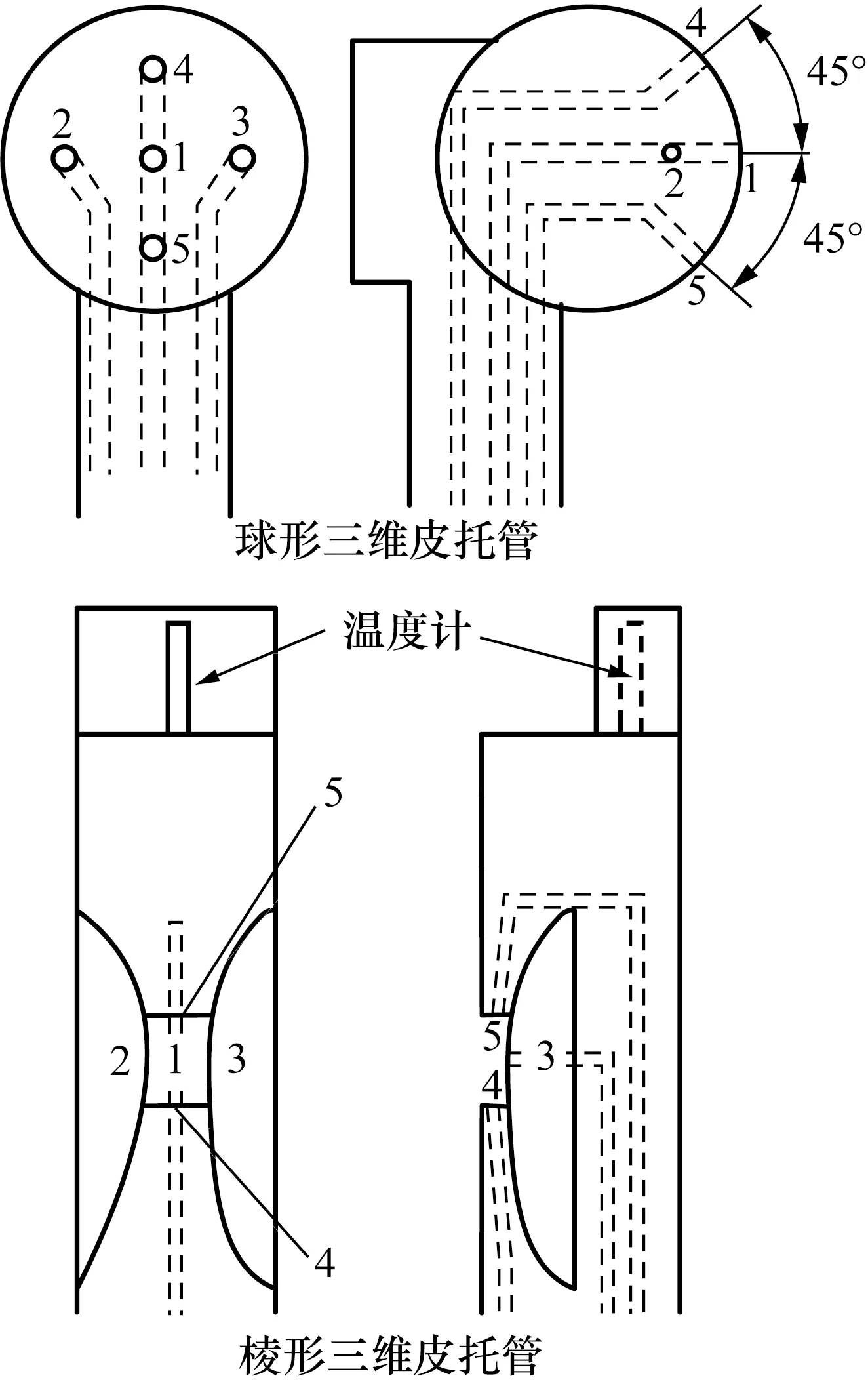
图2 三维皮托管结构示意图Fig.2 3D pitot tube structure diagram
三维皮托管通常具有5个取压孔,取压孔1位于皮托管头部中心处,取压孔2、3对称于取压孔1,孔1、2、3组成的平面为偏航角平面,取压孔4、5对称于取压孔1,孔1、4、5组成的平面为俯仰角平面。偏航角平面和俯仰角平面相互垂直。取压孔1与其他取压孔成一定角度布置。
2.2.2 对向测量三维皮托管的校准方法
使用对向测量三维皮托管可以识别流速的偏航角和俯仰角。在测量前需要对三维皮托管偏航角、俯仰角和流速大小测量分别进行校准。校准前将三维皮托管安装于风洞测试段中心处,取压孔1朝向风洞来流方向,使用水平尺或角度尺调整三维皮托管使取压孔1的轴线和风洞测试段管道轴线平行,此时皮托管位于偏航角的参考位置。
使用FARO三坐标测量机标定三维皮托管支撑杆轴线与测试段轴线角度,使两轴线相互垂直,此时俯仰角θp为0°。在本文中校准俯仰角为-20°~20°,间隔5°,校准流速为5,10,15 m/s。通过绕支撑杆轴线顺时针或逆时针旋转三维皮托管,寻找取压孔2和取压孔3差压为零的角度,取压孔1的轴线相对参考位置角度θ0,ij为三维皮托管在该俯仰角和流速下的偏航角参考位置偏差。在该角度下测量5个取压孔的差压,分别计算三维皮托管俯仰角校准系数F1,ij和流速校准系数F2,ij,计算式见(4)和式(5)所示。
(4)
(5)
式中:F1,ij为在某俯仰角和流速下的俯仰角校准系数;p1、p2、p4、p5为取压孔1、取压孔2、取压孔4、取压孔5的压力值;F2,ij为在某俯仰角和流速下的流速校准系数;vs为风洞测试段标准流速。
记录不同流速和不同俯仰角下的θ0,ij,计算θ0,ij平均值θ0。计算F1,ij在相同俯仰角,不同流速下的平均值F1,i,并拟合F1,i与俯仰角的校准曲线。计算F2,ij在相同俯仰角,不同流速下的平均值F2,i,并拟合F2,i与俯仰角的校准曲线。
2.2.2 对向测量三维皮托管的测量方法
当采用三维皮托管的对向测量方法时,将三维皮托管安装于被测管道内,通过引压管连接三维皮托管的5个取压孔至差压计的测压孔,使用水平尺或角度尺调整三维皮托管使取压孔1的轴线平行于被测管道轴线,通过绕支撑杆轴线顺时针或逆时针旋转三维皮托管,调整取压孔2和取压孔3差压为零,此时流速在测压孔1轴线和支撑杆轴线确定的平面内,记录偏航角θy,用使θ0对偏航角θy进行修正。如式(2)所示。根据差压计示数计算俯仰角系数F1,i,并在F1,i与俯仰角校准曲线中找到所测量F1,i对应的俯仰角值θp。在F2,i与俯仰角校准曲线中找到θp对应的F2,i值。使用式(6)计算被测管道的轴向流速:
(6)
式中F2,i为速度校准系数。
3 参加比对皮托管校准装置
3.1 流速计量标准装置
3.1.1 NIM实验室流速校准装置
NIM实验室课题组搭建了烟道流量计量标准装置,此装置为真实烟道的缩尺模型,其结构如图3所示。烟道流量计量标准装置能够实现流速校准和流量校准两个功能,本文中使用的是流速校准功能。该装置测试段使用口径为0.8 m的圆形管道,使用L型皮托管作为流速标准。使用变频风机改变装置内流速大小,风速调节范围为0.5~55 m/s,流速测量不确定度为0.58%[15]。

图3 NIM实验室烟道流量计量标准装置结构图Fig.3 Structure diagram of NIM stack flowrate standard facility
3.1.2 KRISS实验室流速校准装置
KRISS实验室流速校准装置为直线型风洞,其结构如图4所示。该装置测试段使用0.9 m×0.9 m的矩形管道,使用L型皮托管作为流速标准。使用变频风机改变流速大小,流速调节范围为2~15 m/s,流速测量不确定度为0.6%[16]。

图4 KRISS实验室流速校准装置结构图Fig.4 Structure diagram of KRISS air speed standard facility
3.1.3 NIST实验室流速校准装置
NIST实验室流速校准装置为闭环风洞,其结构如图5所示。该装置测试段使用1.49 m×0.9 m矩形管道,使用激光多普勒测速仪(LDA)作为流速标准,通过L型皮托管和热线风速仪进行验证。使用直流变频风机改变装置内的流速大小,风速调节范围为0.2~70 m/s,流速测量不确定度为0.42%[16]。
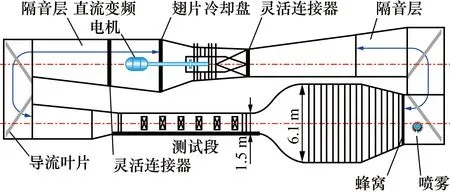
图5 NIST实验室流速校准装置结构图Fig.5 Structure diagram of NIST air speed standard facility
3.2 皮托管自动定位装置
三维皮托管校准需要在多个不同的偏航角、俯仰角和流速大小下进行测量,工作量大并且要求调整角度的准确度高。为此研制了皮托管自动定位装置,该装置能够准确地控制皮托管的偏航角和俯仰角,自动地完成皮托管校准工作[18]。
3.2.1 NIST与NIM实验室皮托管自动定位装置
NIST与NIM课题组研制的皮托管自动定位装置设计原理相同,其结构如图6所示[15,17]。

图6 NIST与NIM实验室皮托管自动定位装置Fig.6 NIST and NIM pitot tube automatic positioning system
自动定位装置可以实现4个自由度的运动,包括水平方向上的x轴和y轴平动,以及绕z轴方向的转动和绕皮托管轴线方向的转动。
调整皮托管的偏航角是使用绕皮托管轴线方向转动的电机直接控制。调整皮托管的俯仰角需要通过自动定位装置的三轴联动(即x轴、y轴和旋转z轴)进行控制,测量时保持皮托管头部固定不动,以皮托管头部为圆心,以支撑杆为半径进行圆弧运动。其角度调整范围和精度如表1所示。
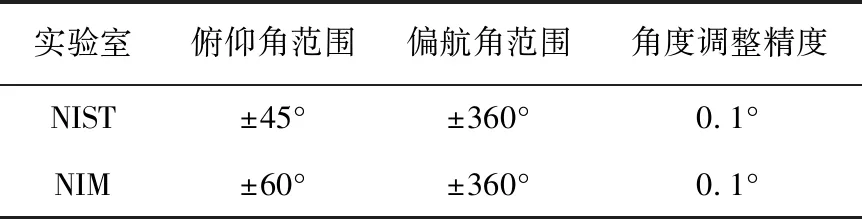
表1 NIST与NIM实验室角度调整范围和精度Tab.1 NIST and NIM angle adjustment range and accuracy
3.2.2 KRISS实验室皮托管自动定位装置
KRISS实验室与NIST和NIM实验室自动定位装置的设计原理不同,其结构如图7所示[17]。

图7 KRISS实验室皮托管自动定位装置Fig.7 KRISS pitot tube automatic positioning system
KRISS实验室的自动定位装置安装在风洞顶部的平台上,皮托管安装在垂直臂上,可以实现皮托管2个自由度的运动,包括绕z轴方向的转动和绕皮托管轴线方向的转动。通过垂直臂上的旋转电机可以调整皮托管的偏航角,通过z轴方向上的旋转电机可以调整皮托管的俯仰角。偏航角调整范围为 ±180°,俯仰角调整范围为±45°,角度调整精度为1°。
4 校准结果分析与比对
4.1 S型皮托管校准结果分析与比对
4.1.1 S型皮托管偏航角校准结果
S型皮托管偏航角的修正值是指偏航角参考位置偏差的平均值θ0。不同实验室比对了在不同流速下校准的偏航角修正值,如图8所示。
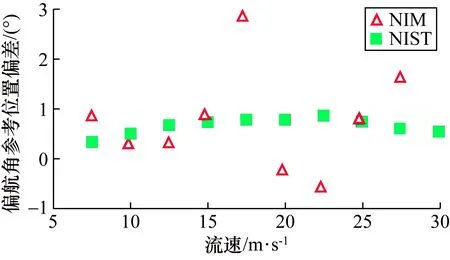
图8 S型皮托管偏航角参考位置偏差比对结果Fig.8 Comparison results of yaw angle reference position error of S-type pitot tube
NIM与NIST实验室测得偏航角参考位置偏差的平均差异为0.2°,最大差异为2.1°。如果皮托管测量时偏航角为5°,则不同实验室测量偏航角参考位置偏差造成轴向流速的平均差异为0.03%,最大差异为0.3%;如果皮托管测量时偏航角为10°,则不同实验室测量偏航角参考位置偏差造成轴向流速的平均差异为0.06%,最大差异为0.6%。
4.1.2 S型皮托管流速校准系数
当确定不同流速下的偏航角参考位置偏差后,对S型皮托管的流速校准系数K进行比对,结果如图9所示。
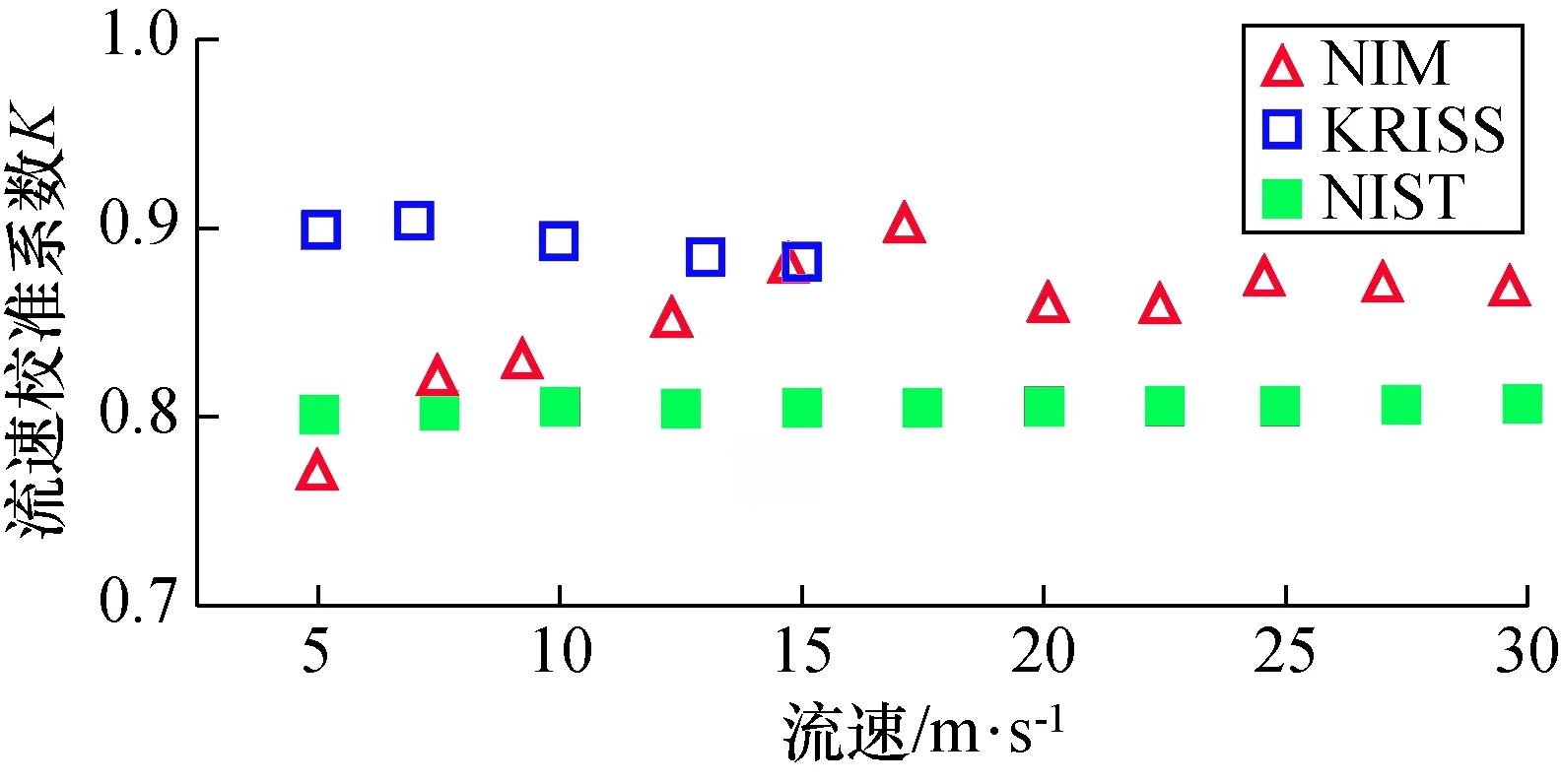
图9 S型皮托管流速校准系数比对结果Fig.9 Comparison results of velocity calibration coefficient of S-type pitot tube
NIM与NIST、NIM与KRISS、KRISS与NIST实验室流速校准系数平均值的差异分别为5.9%、4.4%、10.8%,最大差异分别为11.9%、14.3%、12.2%,则不同实验室测量轴向流速的平均差异分别为5.9%、4.4%、10.8%,最大差异分别为11.9%、14.3%、12.2%。
4.2 球形三维皮托管校准结果及比对
4.2.1 球形三维皮托管偏航角校准结果
不同实验室比对了在不同流速和不同俯仰角下校准的偏航角修正值,结果如图10所示。

图10 球形三维皮托管偏航角参考位置偏差比对结果Fig.10 Comparison results of yaw angle reference position error of spherical 3D pitot tube
由图10可得NIM与NIST、NIM与KRISS、KRISS与NIST实验室测得的偏航角参考位置偏差的平均差异分别为0.6°、1.4°、1.2°,最大差异分别为2.0°、2.7°、2.6°,如果皮托管测量时偏航角为5°,则不同实验室测量偏航角参考位置偏差造成轴向流速的平均差异分别为0.1%、0.2%、0.2%,最大差异分别为0.3%、0.5%、0.5%;如果皮托管测量时偏航角为10°,则不同实验室测量偏航角参考位置偏差造成轴向流速的平均差异分别为0.2%、0.5%、0.5%,最大差异分别为0.6%、0.7%、0.7%。
4.2.2 球形三维皮托管俯仰角校准结果
在校准球形三维皮托管偏航角参考位置偏差后,再对俯仰角校准系数F1与俯仰角拟合曲线进行测量。不同实验室F1与俯仰角拟合曲线比对如图11所示。
根据不同实验室拟合曲线,计算相同的F1对应不同实验室曲线俯仰角差异,并计算由此俯仰角差异造成的轴向流速差异。
对于NIM与NIST、NIM与NIST、NIM与KRISS、KRISS与NIST的F1与俯仰角拟合曲线,相同的F1对应的俯仰角差异平均值分别为2°、1.3°、1.4°,差异最大值为2.8°、2.6°、3°。如果皮托管测量时俯仰角为5°,由不同实验室拟合曲线获得俯仰角的差异造成轴向流速的平均差异均为0.2%,最大差异均为0.3%;如果皮托管测量时俯仰角为10°,由不同实验室拟合曲线获得俯仰角的差异造成轴向流速的平均差异分别为0.5%、0.4%、0.4%,最大差异分别为0.7%、0.7%、0.8%。

图11 球形三维皮托管俯仰角校准系数F1与俯仰角拟合曲线比对结果Fig.11 Comparison of pitch angle calibration coefficient F1 and pitch angle fitting curve of spherical 3D pitot tube
4.2.3 球形三维皮托管流速校准系数校准结果
对流速校准系数F2与俯仰角拟合曲线进行测量。不同实验室F2与俯仰角拟合曲线比对如图12所示。
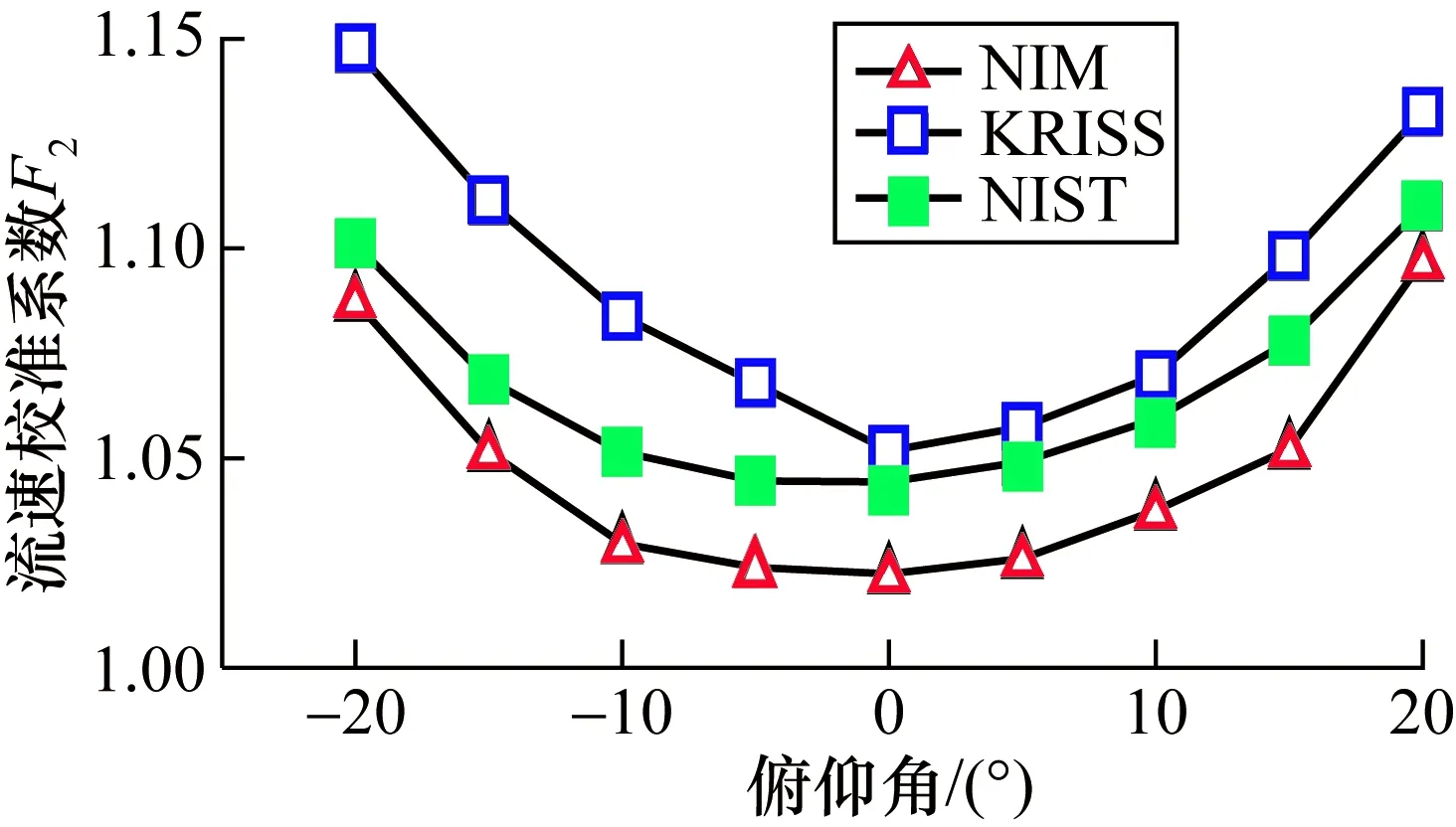
图12 球形三维皮托管流速校准系数F2与俯仰角拟合曲线比对结果Fig.12 Comparison of velocity calibration coefficient F2 and pitch angle fitting curve of spherical 3D pitot tube
根据不同实验室拟合曲线,计算相同的俯仰角对应不同实验室曲线获得的流速校准系数F2的差异,并由式(7)计算在相同的(p1-p2)情况下测量动压的差异,进而计算轴向流速差异:
(7)
式中Δpdyn为所测动压。
NIM与NIST、NIM与KRISS、KRISS与NIST实验室Δpdyn的平均差异分别为3.7%、7.8%、4.5%,最大差异分别为4.7%、10.5%、8.6%,由Δpdyn差异造的成轴向流速平均差异分别为1.9%、4.0%、2.2%,最大差异分别为2.4%、5.4%、4.2%。
4.3 棱形皮托管校准
4.3.1 棱形三维皮托管偏航角校准结果
不同实验室比对了在不同流速和不同俯仰角下校准的偏航角修正值,结果如图13所示。
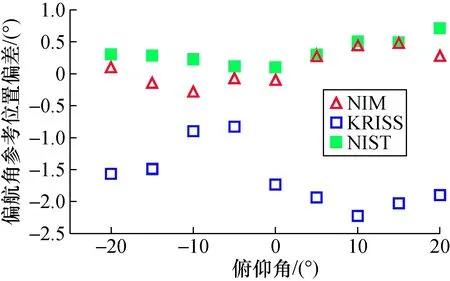
图13 棱形三维皮托管偏航角参考位置偏差比对结果Fig.13 Comparison results of yaw angle reference position error of prism 3D pitot tube
由图13可得NIM与NIST、NIM与KRISS、KRISS与NIST实验室测得的偏航角参考位置偏差的平均差异分别为0.2°、1.7°、2°,最大差异为0.8°、3.6°、3.5°,如果皮托管测量时偏航角为5°,则不同实验室测量偏航角参考位置偏差造成轴向流速的平均差异分别为0.03%、0.3%、0.4%,最大差异分别为0.1%、0.8%、0.7%;如果皮托管测量时偏航角为10°,则不同实验室测量偏航角参考位置偏差造成轴向流速的平均差异分别为0.06%、0.5%、0.6%,最大差异分别为0.2%、0.9%、0.9%。
4.3.2 棱形三维皮托管俯仰角校准结果
在校准棱形三维皮托管偏航角参考位置偏差后,再对俯仰角校准系数F1与俯仰角拟合曲线进行测量。不同实验室F1与俯仰角拟合曲线比对如图14所示。

图14 棱形三维皮托管俯仰角校准系数F1与俯仰角拟合曲线比对结果Fig.14 Comparison of pitch angle calibration coefficient F1 and pitch angle fitting curve of prism 3D pitot tube
根据不同实验室拟合曲线,计算相同的F1对应不同实验室曲线俯仰角差异,并计算由此俯仰角差异造成的轴向流速差异。
对于NIM与NIST、NIM与KRISS、KRISS与NIST的F1与俯仰角拟合曲线,相同的F1对应的俯仰角差异平均值为2°、0.8°、1.4°,差异最大值分别为3.2°、1.2°、2.2°。如果皮托管测量时俯仰角为5°,由不同实验室拟合曲线获得俯仰角的差异造成轴向流速的平均差异分别为0.2%、0.1%、0.2%,最大差异分别为0.3%、0.2%、0.3%;如果皮托管测量时俯仰角为10°,由不同实验室拟合曲线获得俯仰角的差异造成轴向流速的平均差异分别为0.6%、0.2%、,最大差异分别为0.8%、0.3%、0.6。
4.3.3 棱形三维皮托管流速校准系数校准结果
对流速校准系数F2与俯仰角拟合曲线进行测量。不同实验室F2与俯仰角拟合曲线比对如图15所示。
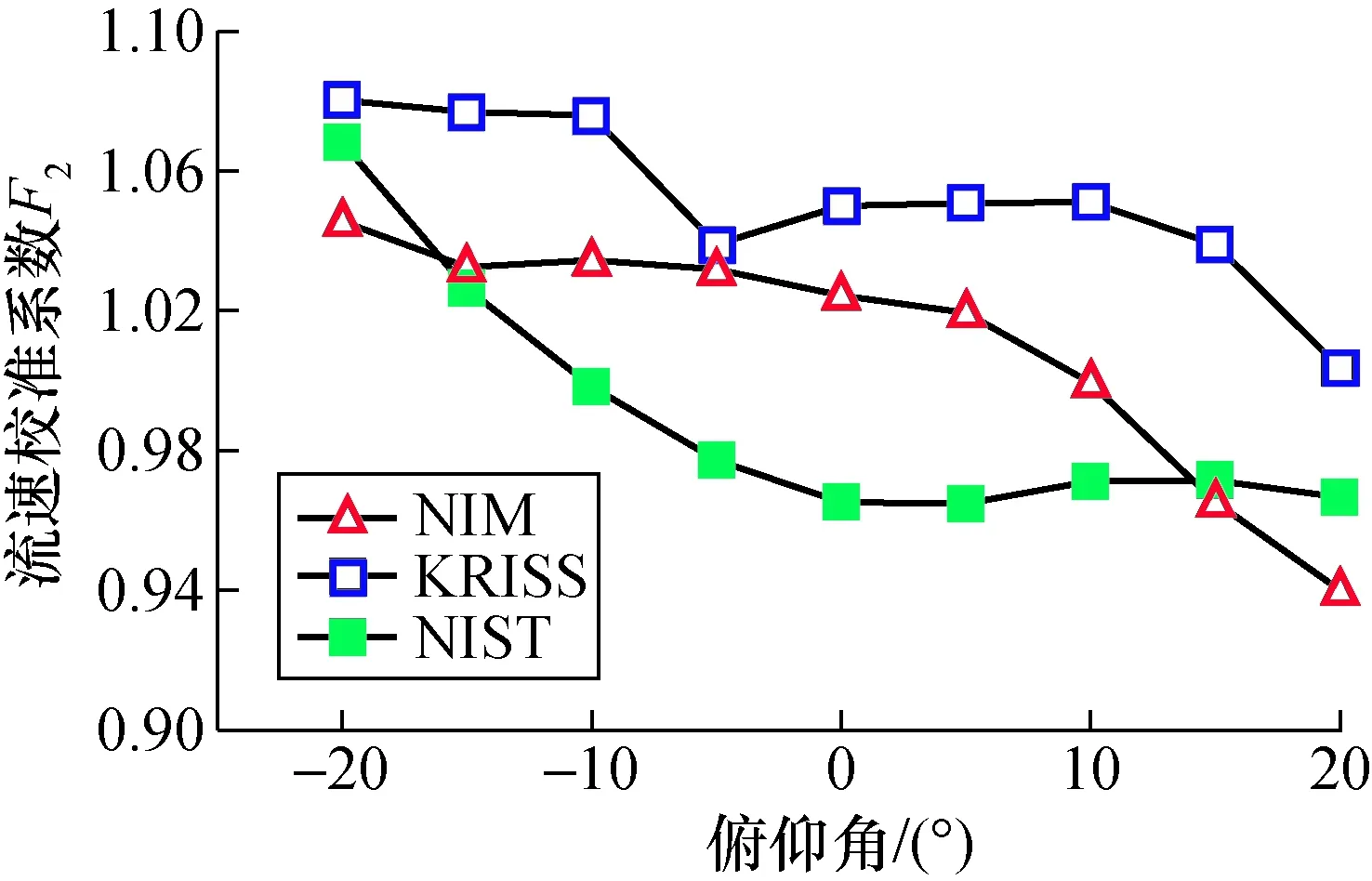
图15 棱形三维皮托管流速校准系数F2与俯仰角拟合曲线比对结果Fig.15 Comparison of velocity calibration coefficient F2 and pitch angle fitting curve of prism 3D pitot tube
根据不同实验室拟合曲线,计算相同的俯仰角对应不同实验室曲线获得的流速校准系数F2的差异,并由式(7)计算在相同的(p1-p2)情况下测量动压的差异,进而计算轴向流速差异。
NIM与NIST、NIM与KRISS、KRISS与NIST实验室Δpdyn的平均差异分别为4.2%、7.7%、12.9%,最大差异分别为12.7%、13.7%、16.2%,由Δpdyn差异造的成轴向流速平均差异分别为2.1%、4.0%、6.3%,最大差异分别为6.1%、7.1%、7.7%。
5 结 论
通过对S型皮托管、球形三维皮托管和棱形三维皮托管的不同实验室校准结果比对得到以下结论:
1) S型皮托管在不同实验室间比对结果吻合度较差,因此说明S型皮托管不适合作为比对标准器;
2) 球形三维皮托管在不同实验室间比对结果吻合度高于棱形三维皮托管;
3) 对于三维皮托管来说,流速校准系数差异对测量轴向流速的影响高于偏航角参考位置偏差修正值与俯仰角校准系数差异;
4) 不同实验室S型皮托管、球形三维皮托管、棱形三维皮托管校准结果表明,偏航角参考位置偏差修正值差异造成的轴向流速差异范围分别为0.03%~0.6%、0.2%~0.8%、0.03%~0.9%,由于流速校准系数差异造成的轴向流速差异范围分别为 4.4%~12.2%、1.9%~5.4%、4.2%~7.7%;
综合以上可知,NIM实验室和NIST实验室校准结果一致性较好。
致谢:感谢美国国家标准与技术研究院和韩国标准科学研究院参与本次比对,并提供的数据支持。
