基于鲁棒正则化极限学习机的电容层析成像图像重建
2022-09-21张立峰
张立峰,戴 力
(华北电力大学 自动化系,河北保定071003)
1 引 言
电容层析成像(electrical capacitance tomography,ECT)技术是新型的多相流可视化测量技术,具有无辐射、非侵入及实时性好等优点[1~5]。ECT图像重建算法可分为非迭代类及迭代类算法。非迭代类算法包括LBP算法、Tikhonov算法等,这类算法成像速度快,在一定程度上可以满足实时性的要求,但是算法精度不高;迭代类算法中最具代表性的是Landweber算法,这类算法的成像质量较高,但耗时较长且具有半收敛性。随着机器学习的发展,2004年Huang G B提出了极限学习机(extreme learning machine,ELM)[6,7],该网络具有易于实现、训练速度快等优点[8]。文献[9]将ELM应用于ECT图像重建[9],取得了一定的效果,但重建图像仍可进一步提升。Chen K等[10]于2017年提出了基于迭代重加权最小二乘法(iterative reweighted least squares,IRLS)的鲁棒正则化ELM,并将其应用于回归问题,取得了良好的效果。
为进一步提升基于ELM算法的ECT图像重建质量,本文将基于IRLS的鲁棒正则化ELM(robust regularized extreme learning machine,RELM)用于ECT图像重建,下文简称RELM-IRLS算法,并与传统的Landweber迭代算法及ELM算法进行比较分析,仿真与静态实验结果均表明所提出的基于l2-norm正则化的RELM-IRLS算法可较好地实现ECT图像重建。
2 ECT基本原理
2.1 ECT系统构成及工作原理
ECT系统一般由3部分组成:1) 电容传感器阵列;2) 数据采集单元;3) 图像重建、控制和显示的计算机系统[8]。ECT系统如图1所示。

图1 ECT系统结构图Fig.1 Structure diagram of ECT system
由电容传感器阵列获取被测对象的信息,然后由数据采集单元进行信号处理并送往计算机,计算机根据一定的图像重建算法,重建出被测对象某一截面的图像[11]。传感器由均匀分布在管壁的n个电极组成,可获得n(n-1)/2个独立电容测量值。
2.2 ECT系统图像重建
ECT图像重建是根据电容值来获取介电常数分布。非迭代类算法中的典型算法为线性反投影算法[13](linear back-projection algorithm,LBP),如式(1)所示:
G=STC
(1)
式中:G为重建图像灰度矩阵;C为测量电容向量;S为灵敏度矩阵。
迭代类算法由于精度较高而得到了广泛的使用,但其重建速度较慢。常用的迭代类算法为Landweber迭代算法,如式(2)所示[14~16]:
(2)
式中:Gk为第k步迭代的图像灰度矩阵;G0为迭代初值,取GLBP,由LBP算法得到;αk为第k步的迭代因子,迭代因子αk根据经验选取,本文选取αk为1.5。同时,本文将Landweber算法的迭代次数固定为200次。
3 基于RELM-IRLS的ECT图像重建
3.1 ELM算法原理
在回归问题中,对于一组给定的训练数据S={(x(i),y(i)),i=1,…,N}⊂Rd×R,Rd×R表示d×1维的实数域空间,d表示xi是d维向量。定义隐层节点数为L,单隐层前馈网络(SLFNs)的ELM数学模型如式(3)所示:
(3)
式中:h(x)=[h1(x),h2(x),…,hL(x)];β=[β1,β2,…,βL]T;βi为连接输出层和第i个隐层节点的权重;hi(x)为激活函数,可选为径向基函数或Sigmoid函数等。ELM极小化的目标损失函数如式(4)所示:
(4)
其中:H=[h(x(1))T,h(x(2))T,…,h(x(N))T]T;Y=[y(1),y(2),…,y(N)]T。
则优化问题的解如式(5)所示:
(5)
3.2 RELM-IRLS算法原理
基于l2-norm正则化的RELM-IRLS方法的目标函数如式(6)所示:
(6)
(7)
Bisquare损失函数的梯度函数ψ(z)和权值函数w(z)分别为:
(8)

(9)
式(6)所示的问题可以通过IRLS进行优化。每次IRLS迭代相当于求解1个加权最小二乘问题。权重取决于最后1次迭代的残差。对于Bisquare损失函数,目标函数式(6)不是凸的,IRLS收敛于局部最小值。
基于KKT理论,等式(6)等价于求解以下的对偶优化问题:

(10)
式中拉格朗日乘子α(i)对应于第i个样本。
利用IRLS方法可以求解式(10)的极小化问题,令式(10)的一阶导数等于0,可得:
(11)
式中w(·)为鲁棒损失函数的权值函数。输出权值β的解如式(12)所示:
(12)

第2步,计算隐层输出矩阵H;

第4步,
第5步,ζt=y(i)-h(x(i))βt;σ=σMAR/0.674 5;

第7步,t=t+1;
第8步,若βt收敛或t>tmax,则停止迭代;否则返回第4步。
在RELM-IRLS算法中,需选择4个参数,即L,C,k,tmax。由于该方法收敛速度快,学习过程在20次迭代内收敛,故选取最大迭代次数tmax=20。C和k通过交叉验证选择。k从kdef×{2,1,0.7,0.3,0.1}中来选择,其中kdef是Bisquare函数的默认值4.685。
通过交叉验证,本文选取隐层节点数L=900,C=2-4,k=2。L∈{100,200,…,2 900,3 000};C∈{2-10,2-9,…,230};k∈kdef×{2,1,0.7,0.3,0.1}。
4 实验结果及分析
4.1 仿真实验
4.1.1 仿真条件及步骤
仿真条件为:intel(R) Core(TM) i5-6300HQ CPU,4G内存电脑。采用基于Matlab的ECT有限元仿真软件进行仿真,仿真对象为油/气两相流,油和气的相对介电常数分别设为3和1。将成像区域剖分12层,共剖分为1 728个三角形单元,如图2所示。
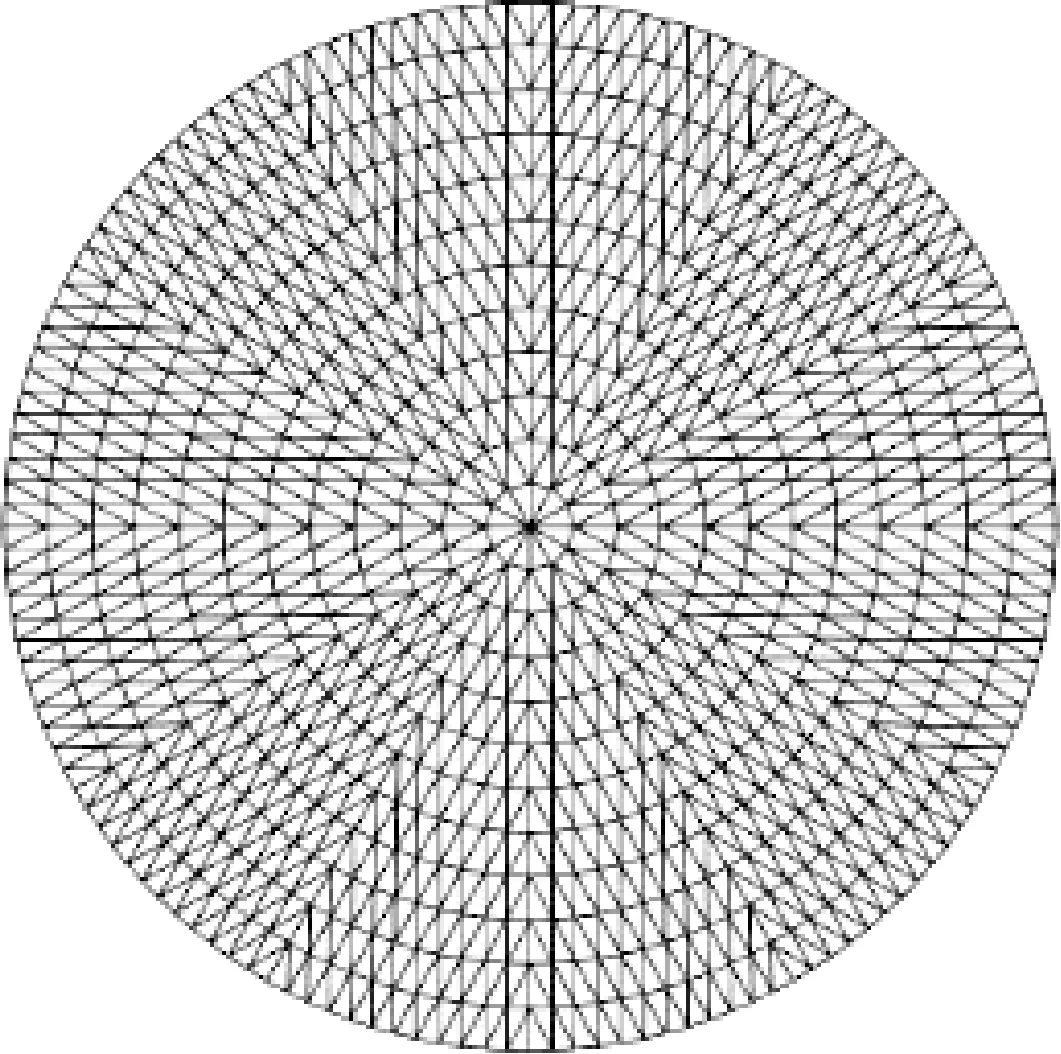
图2 剖分网格Fig.2 Mesh grid
利用RELM-IRLS算法进行图像重建,并与ELM算法、Landweber算法进行比较。RELM-IRLS算法步骤如下:
1) 样本生成。选取单泡、两泡、三泡、层流、环流5种典型油/气两相流流型进行仿真。随机生成5种流型的样本各1 000个;
2) 网络训练。将每种流型的800个样本作为训练集,100个样本作为验证集,100个样本作为测试集。将4 000个训练样本的测量电容值作为RELM-IRLS网络的输入,将介电常数分布作为RELM-IRLS网络的输出。通过更改相关网络参数训练多个RELM-IRLS网络;
3) 通过交叉验证的方法,依据验证集样本的平均相对误差选取RELM-IRLS的最优参数;
4) 根据选取的参数完成RELM-IRLS网络的训练;
5) 利用RELM-IRLS算法进行测试集的图像重建。
对于ELM网络,需要选取的参数为隐层节点数,依据RELM-IRLS网络选取最优参数的方法,选取ELM网络的隐层节点数为500。
为定量比较RELM-IRLS算法、ELM算法及Landweber算法的重建图像质量,本文采用图像相对误差作为评价指标,其定义为[17,18]:
(13)
式中:g和g*分别为原始流型及重建图像的灰度矩阵。
4.1.2 重建图像分析
某组测试样本的图像重建结果,如图3所示。
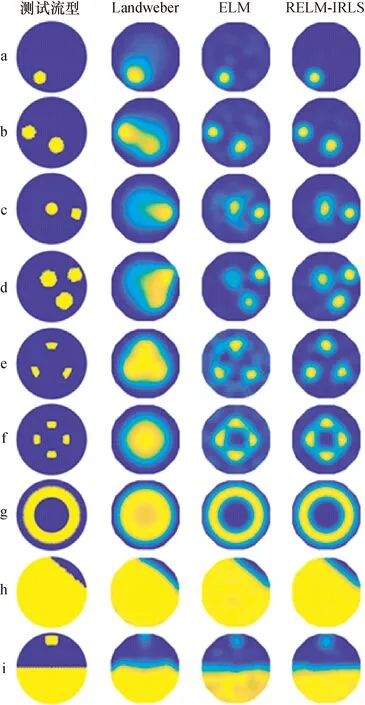
图3 测试样本的重建图像Fig.3 Reconstructed images of test samples
由图3可以看出,对于测试样本中的多泡流型及环流(测试流型b~g),Landweber迭代算法所得重建图像出现严重失真,对于层流及日出流型(测试流型h~i),重建图像误差较大;ELM算法相较于Landweber迭代算法,重建图像质量得到明显提升,能较好地重建物体分布,多泡之间区分度尚可,但仍存在伪影,对测试流型h~i,重建图像的误差较明显;而对于RELM-IRLS算法来说,其重建图像总体质量均优于前两种算法,重建图像伪影较少、形状保真度较好、边缘轮廓清晰,能较好地区分多个气泡。计算图3中重建图像的图像相对误差ER,如表1所示。由表1可见,RELM-IRLS算法的图像相对误差均低于ELM算法及Landweber迭代算法,与图2中更优的重建图像相吻合。
同时,计算图3中3种算法的图像重建算法运行时间,如表2所示。由表2可见,ELM及RELM-IRLS算法的运行时间明显小于Landweber迭代算法,其时间相差2个数量级,而ELM及RELM-IRLS算法的运行时间处于同一数量级,二者相差不大,可满足实时成像要求。
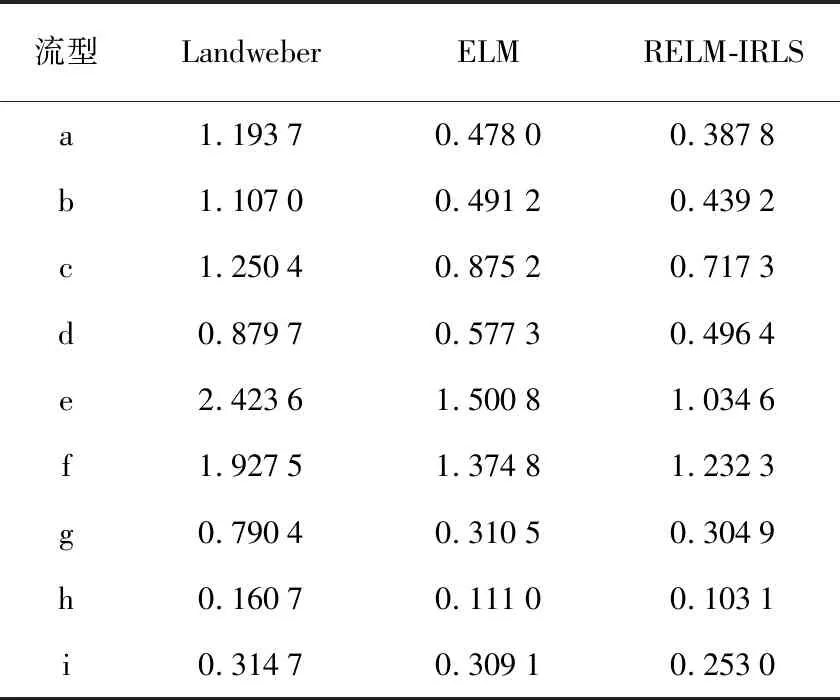
表1 测试样本ERTab.1 ER of test samples
4.1.3 测试集重建图像平均误差分析
图3为某组测试样本的重建结果,对测试集进行图像重建,分别计算得到各流型对应测试样本的平均误差,如表3所示。
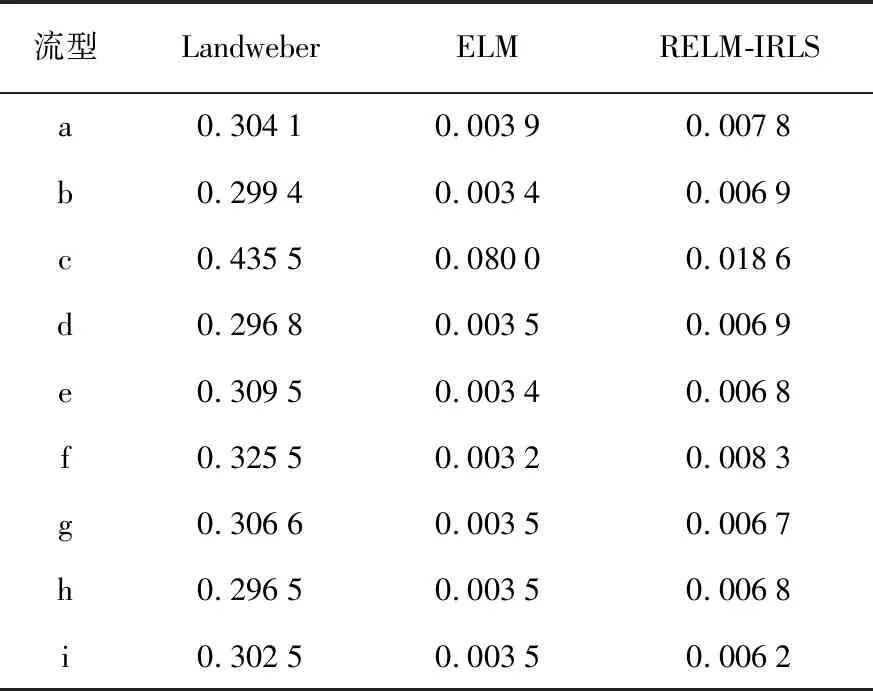
表2 算法运行时间Tab.2 Running time of algorithms s
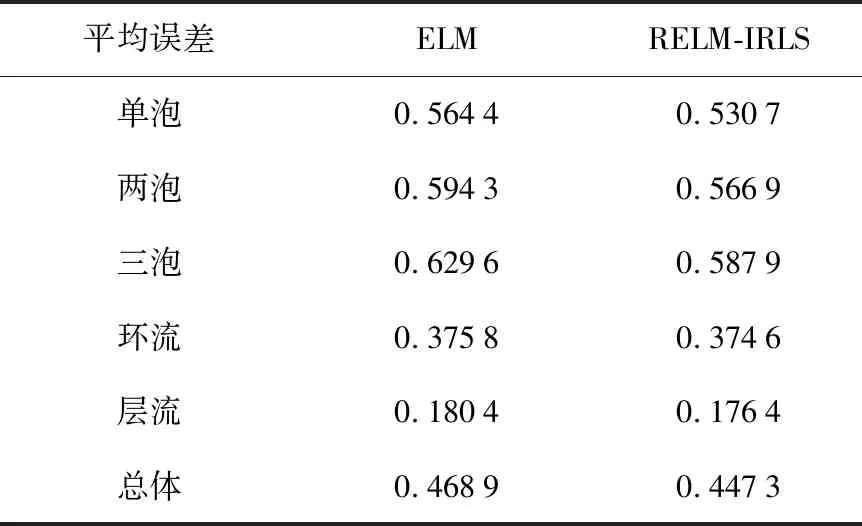
表3 测试集平均误差Tab.3 Average error of test set
由表3可以看出,RELM-IRLS算法与ELM算法相比,对于各种测试流型,测试样本的平均重建图像相对误差及总体平均误差均更小,反映了其较好的泛化性能。
4.2 静态实验
静态实验采用华北电力大学先进测量实验室的ECT系统进行了静态实验,ECT实验系统如图4所示。采用有机玻璃棒、塑料颗粒模拟油相,进行相应油/气两相流静态模拟实验,2种算法的重建图像如图5所示。

图4 ECT实验系统Fig.4 ECT experimental system

图5 静态实验重建图像Fig.5 Reconstructed images of static experiments
由图5可以看出,对于真实分布中的两棒、三棒及五棒分布为多物体分布,且中心区域存在物体分布,Landweber迭代算法出现严重失真,无法重建中间物体,对于中心区域无物体分布的四棒分布流型,Landweber迭代算法重建图像呈现多物体之间互相粘连,伪影较大,对于环流分布,Landweber迭代算法重建误差大;ELM算法重建结果相较于Landweber迭代算法,有明显提升,但仍存在伪影较大,物体之间存在粘连;而基于RELM-IRLS算法的重建图像相比前两者质量最优,多物体间轮廓分明,形状保真度高,且四棒及五棒分布在之前网络训练中并未训练过,RELM-IRLS算法仍得到了较高质量的成像结果,充分表明了该算法良好的泛化性能。
5 结 论
本文提出了基于IRLS的鲁棒正则化ELM算法,并将其用于ECT图像重建。RELM-IRLS网络采用Bisquare函数作为损失函数,用于增强鲁棒性,采用l2-norm正则化项用于避免过拟合。利用IRLS对具有鲁棒损失函数和正则项的目标函数进行优化。仿真及静态均取得了较好的重建效果,比经典ELM网络具有更好的泛化能力,且成像质量优于Landweber迭代算法,具有较好的应用前景。