耳蜗力学:力学仿真模型*
2022-09-20张天宇任柳杰李辰龙王心玥华诚姚文娟丁光宏
张天宇 任柳杰 李辰龙 王心玥 华诚 姚文娟 丁光宏
1 复旦大学附属眼耳鼻喉科医院眼耳鼻整形外科(上海 100031);2 复旦大学附属眼耳鼻喉科医院耳鼻喉科研究院; 3 国家卫生健康委员会听觉医学重点实验室(复旦大学); 4 上海大学力学与工程科学学院; 5 复旦大学航空航天系
耳蜗力学研究的两大手段——实验测量与力学模型仿真,两者相辅相成,实验测量为模型建立和验证提供数据,力学模型仿真则通过对物理现象的再现和分析,揭示现象背后的机制。力学仿真是力学学科理论、实验、仿真三大研究工具之一,正如生物力学之父冯元桢先生在其著作《生物力学》序中所述,“......用力学的方法来处理从前不属于力学的问题,使许多医学及生理学上知其然而不知其所以然的观察及经验有了较深的了解”。力学仿真成本低、可重复、可控性强,既可以获得当前技术无法测量的结果,还能够改变现实中无法调整的参数,是机制研究的重要手段。
耳蜗力学涉及两个力学过程:一是外界声音进入耳蜗后以基底膜上行波形式实现了频率分离,二是Corti器运动时内毛细胞(IHC)的感音与外毛细胞(OHC)的主动放大(Pallos,2012)。这两个过程分别对应耳蜗力学中的宏观力学(macromechanics)模型和微观力学(micromechanics)模型。宏观力学模型通过再现行波的产生、传播而揭示耳蜗频率分离的物理基础,微观力学模型则旨在揭示Corti器的局部运动及耳蜗非线性、主动放大的本质[1]。本文主要阐述这两类耳蜗力学模型的进展,重点介绍耳蜗力学模型的基本框架和方法,以及模型在行波再现、耳蜗主动放大等重点问题研究中的应用。
1 耳蜗力学模型的基本框架和方法
1.1力学建模仿真的一般框架 力学建模仿真是应用数学的分支,其一般流程为:①构建简化模型。从复杂的实验现象中找出反映现象物理本质的主要因素,并抽象出简化模型。在简化过程需要建立一系列基本假设,包括但不局限于几何形态的简化、次要因素的省略、主要结构的近似、以及材料模型的选择等;②建立控制方程和初、边值条件。基于物理原理(如经典的牛顿第二定律)建立模型的控制方程,在力学模型中往往是常微分或者偏微分方程,这些方程需要给定合适的激励条件、初值条件和边界条件才具有封闭的唯一解;③方程数值求解。除少量简单问题具有解析解以外,大多数实际问题需要通过编写计算机程序或者应用商用软件进行数值求解;④结果验证和分析。提取计算结果与现有的实验测试结果比较,以验证模型正确性或进行模型迭代优化。在模型得到验证后进行结果分析、参数讨论、乃至其它工况的预测。
1.2耳蜗模型的简化 根据研究目的不同,需要对耳蜗模型进行不同程度的简化。相较于复杂精巧的耳蜗迷路结构,在大部分模型中将耳蜗迷路进行拉直、简化,将Corti器简化为近似的弹性结构,在一维模型中甚至忽略了蜗管的空间结构。尽管如此,这些极度简化的模型仍可再现耳蜗功能中的重要现象,如行波的频率选择性。根据几何结构简化程度不同,耳蜗模型有连续介质模型、集总参数模型两大类。前者将耳蜗重要结构进行几何实体化,基于连续介质力学理论建立控制方程,因此几何更为准确,但计算量较大;后者则常使用抽象的质量、弹簧、阻尼元件(或者用电感、电容、电阻等电学单元比拟)对耳蜗内各结构进行力学模拟。在许多模型中,两种方式也常联合使用,如将耳蜗内流体建模为连续介质,而将包含基底膜的Corti器结构简化为力学元件。此外,由于耳蜗最重要的功能是对于声音激励的频率分离,因此激励条件往往采用某个频率的纯音,此时控制方程可以在频域进行求解。当需要考虑复杂激励或者耳蜗主动非线性时,则需要进行时域求解。
1.3数值计算方法 耳蜗力学模型的控制方程往往是时间和空间上的二阶偏微分方程,需要通过数值方法进行近似求解。在空间上,常采用WKB半解析法、有限差分法、有限元法等进行离散;在时间上,则可进行频域求解,或者采用龙格库塔法等方法进行时域推进。WKB半解析法具有计算量小的优势,但其适用的耳蜗模型较为简化;有限元法对耳蜗结构则可以做到更为准确的几何描述,但计算代价较大。
2 宏观耳蜗力学模型
2.1盒状耳蜗模型(box model) 耳蜗宏观力学的经典模型是盒状模型(图1a),该模型常用于仿真行波的发生与发展,其核心物理问题是耳蜗流体与基底膜弹性结构的相互作用(称为流固耦合或声固耦合)——即基底膜的速度引起耳蜗流体压力变化,耳蜗前庭阶和鼓阶压力差反过来驱动基底膜运动。行波现象的再现是模型检验的最主要指标。盒状模型一般满足以下多个基本假设:
①忽略前庭膜,将基底膜及Corti器近似为弹性膜、耳蜗分隔为充满淋巴液的前庭阶和鼓阶;②拉直耳蜗螺旋结构,并简化其截面为规则形状(矩形或半圆形),在一些模型中还假设前庭阶和鼓阶对称;③假设耳蜗骨壁为刚性,故边界上流体压力梯度为0;④前庭阶和鼓阶在蜗孔处连接,此处两阶流体压力相等;⑤忽略流体的粘性效应,在部分模型中还假设流体不可压缩;⑥前庭阶和鼓阶的基部各有一流体开口,分别对应卵圆窗和圆窗。在卵圆窗处给定声音激励,圆窗则作为压力释放窗口;⑦前庭阶和鼓阶与基底膜接触的边界设定为流/声固耦合边界。
根据流体的不同假设,使用线性Navier-Stokes方程或Laplace方程描述流体的压力和速度,作为模型的控制方程。此外,根据对耳蜗轴向(耳蜗轴方向)、径向(基底膜宽度方向)和周向(基底膜长度方向)三个维度的简化程度,耳蜗模型可分为一维、二维和三维模型。Zwislocki (1950)、Peterson和Bogert (1950) 等建立的经典的一维耳蜗模型(也称为传输线模型)首次给出了Békésy行波的理论解释。Peterson分析了在耳蜗长度方向的压力分布,表明在耳蜗中存在着快波成分和慢波成分。快波成分以声速传播,但不引起基底膜运动;慢波成分本质上是两阶的压力差,以与行波同样的速度,从耳蜗基底部向顶部传播并不断衰减。随后Steele、Allen、Neely、Boer等人也建立了一系列从一维到三维的耳蜗盒状模型,对行波进行了更准确的仿真。受当时计算机算力限制,这些模型大多采用了WKB半解析法进行近似求解。Givelberg(2003)建立近似物理耳蜗模型并应用浸没边界法进行了时域求解,但在当时计算代价十分巨大[2]。
在2000年以后,有限元模型开始广泛应用于耳蜗力学建模。Parthasarathi等(2000)、Ren等[3,4]、Xu等[5]建立了拉长的耳蜗模型,对行波现象进行了再现。Böhnke等(2006)、Yao等[6]则建立了耳蜗有限元螺旋结构模型,Ren等[7]、Areias等[8]比较了三维拉直和螺旋耳蜗模型基底膜振动的差异。Ni等[9]发展了波有限元算法。Gan等(2007)、Wang等[10]还建立了包括耳蜗、中耳听骨链乃至外耳道的有限元模型,模拟了外周听觉系统完整的传声过程。
2.2被动与主动耳蜗模型 行波的频率选择性取决于基底膜沿长度方向变化的刚度。在耳蜗模型中,基底膜既可采用质量与弹簧的集总单元描述[3,4],也可采用梁、板连续体近似[5-10],但各种形式下其刚度都具有长度方向近似指数衰减的特性。即使不考虑外毛细胞的主动响应,仅凭借基底膜的机械力学特性即可实现声音频率成分的空间分离,这一类模型称为被动耳蜗模型。尽管其基底膜响应的频率选择性与听神经的响应在低声强刺激下不能匹配,但与在尸体耳蜗上及高声强下的测量结果具有较好的吻合性。
以耳声发射和外毛细胞电致运动为代表的耳蜗主动性是耳蜗力学的重要突破[11],另一类主动耳蜗模型被开发用以研究耳蜗主动响应,如压缩非线性、畸变产物耳声发射等现象。主动耳蜗模型的基本逻辑:外毛细胞纤毛感知基底膜运动,胞体伸缩变形产生的力以反馈的方式加载到基底膜上,进一步对基底膜的运动进行增幅(图1b)。此时,需要对基底膜及Corti器的微观力学行为进行建模,即引入微观耳蜗力学模型。在实际建模中,OHC反馈具有多种实现方式:如负阻尼、Corti器的多自由度系统、前馈与后馈系统等。
2.3宏观耳蜗力学模型的应用 宏观耳蜗力学模型在听觉生理病理研究中发挥了重要作用[12]。Kim等(2011,2014)、Chan等[13]、Ren等[14]使用耳蜗模型仿真了骨导下的行波,发现其产生机制与气导的类似,是前庭阶与鼓阶压力差——即压力慢波成分的产物。Guan等[15]利用集总参数模型研究上半规管瘘时骨导听觉的敏化现象。Oh等[16]、Areias等[17]模拟了内淋巴积水对耳蜗力学的影响,认为基底膜刚度的变化是早期低频听力下降的主要因素。Zhang等[18]研究了镫骨硬化患者经圆窗激励下的耳蜗响应。Brown等[19]模拟了爆震声对耳蜗力学的影响。
3 微观耳蜗力学模型
耳蜗微观力学主要关注Corti器、尤其是听毛细胞在声刺激下的力学响应,因而在微观耳蜗力学模型中,对Corti器的几何描述更为精细。在被动耳蜗模型中,Corti器常使用一系列单自由度的弹簧质量阻尼系统表示,这一类模型无法产生尖锐的频率调谐,因而无法模拟低声强激励下耳蜗的真实响应。早期使用可变阻尼乃至负阻尼的方式调节模型中基底膜振动,从而再现基底膜响应的压缩非线性。Neely等(1986)使用双自由度系统描述Corti器运动,根据基底膜和盖膜的相对运动对基底膜施加反馈力(如图1c)。随后考虑网状板的运动,另一种三自由度模型也常被应用(Ramamoorthy,2007)。Geisler等(1995)、Lim与Steele等(2002)根据沿Corti器耳蜗长度方向的周期重复,提出了前馈(feedforward)和后馈(feedbackward)机制。前馈机制指倾斜外毛细胞的收缩力对其前方(蜗尖方向)Corti器重复单元的正向作用力;而后馈机制则指通过指状凸对其后方单元的抑制作用力。该微观耳蜗力学模型被集成了一维、二维、三维耳蜗模型中[20],但Yoon等(2011)指出,这一类模型对于基底膜运动相位延迟的计算结果和实验测量结果可能有差异。
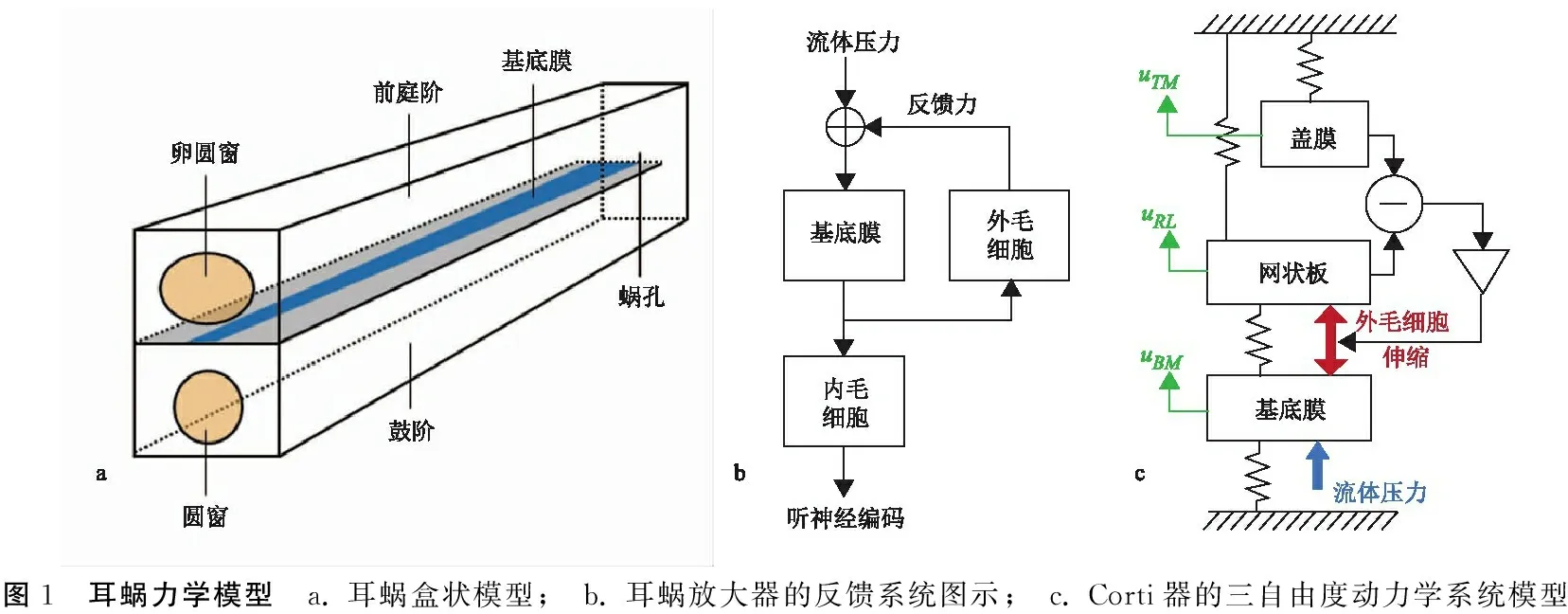
图1 耳蜗力学模型 a. 耳蜗盒状模型; b. 耳蜗放大器的反馈系统图示; c. Corti器的三自由度动力学系统模型
亦有研究者建立了几何更为精细的Corti器有限元模型。例如,杨琳等(2008)建立了Corti的二维截面有限元模型,分析了其振动模态;Cai等(2003)建立了若干耳蜗截面的二维有限元模型,计算其流固耦合问题。但上述模型均没有考虑外毛细胞的主动运动。Kolston和Ashmore(1995)以简单的杆、梁结构为基础建立了Corti的三维模型,并考虑了OHC的主动响应。Ni等[21]建立Corti器的有限元模型,在模型中使用压电单元模拟外毛细胞的电致运动,模拟了Corti器在静压、声压刺激下的主动响应。尽管上述Corti器有限元模型对Corti器的几何形态和解剖结构进行了相对精细的描述,但由于计算成本限制,多为耳蜗截面模型或者局部的三维耳蜗模型。将其扩展为全耳蜗模型,或者与三维盒状耳蜗模型耦合起来仍具有相当的挑战性。
4 外周听觉系统的多尺度模型
耳蜗感音功能的实现涉及多个尺度的协同工作:在耳蜗宏观力学尺度上(mm~cm级)是耳蜗淋巴液和基底膜的相互作用,在耳蜗微观力学尺度上(μm~mm)是Corti器的动力学行为,更小的尺度则包括内、外毛细胞(μm级)的细胞电生理活动、毛细胞纤毛运动及其上离子通道的活动(nm~μm级)。因此,亦有研究者建立了毛细胞的电学模型以及纤毛的力学模型[1]。
外周听觉系统将声音信号从外耳收集、中耳传音放大、耳蜗感音转化为神经电信号,耳蜗的感音过程又涉及行波的频率分离、Corti器的主动放大、OHC和IHC的电生理活动及最终的神经电信号(动作电位)的发放。建立完整、全面的外周听觉系统的多尺度模型对理解听觉生理、疾病机制、乃至人工耳蜗等听觉设备的应用具有重要价值。在这一类模型中,由于计算量巨大,耳蜗模型常采用一维传输线模型。如Saremi和Stenfelt[22,23]建立了涉及中耳、耳蜗宏微观力学模型、乃至内外毛细胞的多尺度模型,并仿真了代谢性老年性聋及噪声性听力损失对耳蜗功能的影响。
5 总结
力学仿真模型是耳蜗力学研究的重要手段。力学仿真可以看作是运行在计算机上的“数值实验”,相较于在生物实体上的实验,具有成本低、可多次重复、可独立控制实验中难以控制的变量、获取当前技术手段无法获得的测量结果等优势。但是,力学仿真准确性的保证需要十分谨慎:研究者需要洞见生理/病理问题的物理本质并合理简化,选择符合实际的物理参数,采用准确数值计算方法,并将计算结果与现有实验数据进行对比以验证模型。
随着耳蜗力学实验测试手段的进步,研究者已经可以测量到Corti器的微观运动[24],这是当前耳蜗力学模型研究的机遇和挑战——一方面可以获得更多的测试数据进行比较和验证,为模型优化提供依据;另一方面,需要借助模型研究的优势,揭示以Corti器为主体的耳蜗放大器的机制,为非线性压缩、畸变产物、听神经锁相行为等现象提供理论依据。疾病机制、Corti器主动放大机制是未来耳蜗力学仿真模型研究的重点。
