可靠声路径传播特性及目标定位方法研究现状*
2022-09-16沈同圣郜永帅罗再磊
沈同圣 郜永帅,2 罗再磊
(1 国防科技创新研究院前沿交叉技术研究中心 北京 100071)
(2 哈尔滨工程大学水声工程学院 哈尔滨 150001)
0 引言
随着各国对海洋开发力度的加大和深海环境水声技术研究需求的急剧增加,对于中远程距离内的深海水下运动目标的探测已成为当前水声技术研究的热点。深海可靠声路径(Reliable acoustic path,RAP)作为近海底深水区和海面附近水域之间的一种直达波传播路径,具有声传播距离远、传播损失小、传输信道稳定、低频环境噪声级低等特点,便于利用深海海底附近的水听器,实现对近海面中近距离目标有效而无盲区的监测,近年来备受国内外学者关注和研究。国外对于深海的研究起步早且已经进行了大量的研究和实验工作,相对而言,我国在相关方面的研究起步晚,实验工作较少,对深海环境特征、水声传播特性等仍缺少长期的声学观测和数据积累[1]。因此,深海声场特性的研究和深海目标探测定位技术的发展日益重要,需要迎头赶上。
1 RAP研究背景及意义
深海水下运动目标隐蔽性好,其携带的先进水下设备可对周边海洋环境及目标实施监测。海洋安保需要实现对水下运动目标的自主警戒,各临海国家纷纷推出海洋发展战略和海洋科技发展规划,大力发展对水下运动目标的探测预警装备[1]。然而,复杂海洋环境背景下的水下运动目标辐射声信号微弱,仅依靠水声信号处理技术对目标进行探测和定位面临极大的挑战。此外,深海声场深度的垂直分布和声影区又严重限制声呐对远距离目标的探测性能,使得传统上对安静型潜艇的探测变得十分棘手[2]。因此,结合深海声传播自身的特点的目标探测和定位方法成为一种新的思路。
深海声速梯度中,与海面附近最大声速相等的深度称为临界深度[3]。海面海底作用对临界深度以深的声源辐射的声信号影响较小,声信号可以传播到中等距离,认为该声道是“可靠的”,故称之为可靠声路径[4]。典型深海声速梯度如图1 所示,RAP环境下传播损失和区域划分如图2 所示。由图2 可以看出,对应于图1 的声速梯度情况,当声源位于4200 m 时,直达声和海面反射声可以覆盖约0~35 km 的近海面区域,该范围内近乎不存在声影区且传播损失较小。根据互易定理[5],声源和接收位置互换时声场将不会改变。若探测设备放置在临界深度以深的RAP中,可以对图2 中直达声与海面反射声共存区内的近海面目标实现“无盲区”监测。此外,探测区域三维空间为以探测设备深度方向轴对称的“碗”,其碗口口径为海深的5~7 倍。因此,RAP 的上述特性有望提高声呐系统对中近距离水下目标探测和定位的性能。
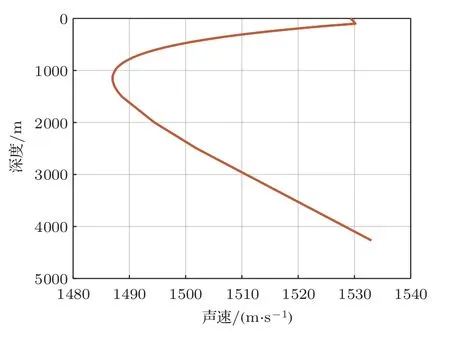
图1 典型深海声速梯度图Fig.1 Typical deep sea sound velocity
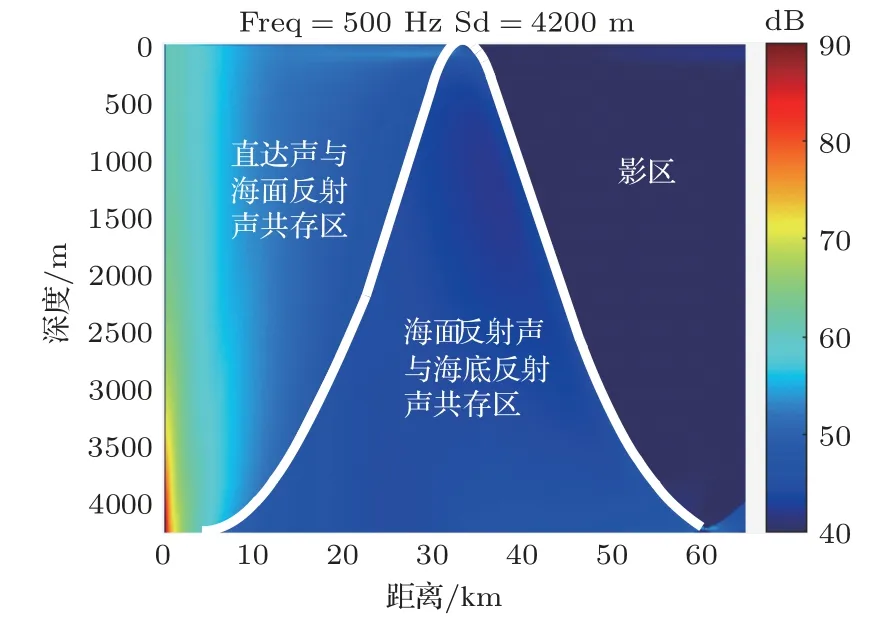
图2 RAP 环境下的传播损失和区域划分Fig.2 Sound transmission loss and regional division of RAP
2 RAP声传播特性研究
Urick[6]提出当海洋深处的声源声波传播至中等距离时,会形成“稳定的声线路径”,这是对RAP概念最早的解释。1989年-2005年期间,作为北太平洋实验室项目的一部分,Worcester 等[7]利用垂直和水平接收阵列相结合的方式进行低频、宽频带的深海声波传播实验。尽管实验涉及到RAP 的声传播,但是当时并未对RAP特性进行更进一步的研究。RAP 最早应用在美国建立的深海海啸灾害监测系统,该系统提供了远程监测海啸的能力,在海啸监测方面发挥着重要的作用。2004年发生的印度洋海啸促使该系统于2008年升级为DARTII[8](如图3 所示)。美国国防部从中认识到RAP 传播损失小、环境噪声级低的特点,研究了分布式潜艇捕猎系统[9]。此外,该系统在第二阶段开发了一种可变形的被动式固定声呐系统,可以实现与近海面节点进行水声通信。Duan 等[10]对RAP 的物理特性进行了分析,并总结出其4个特征:
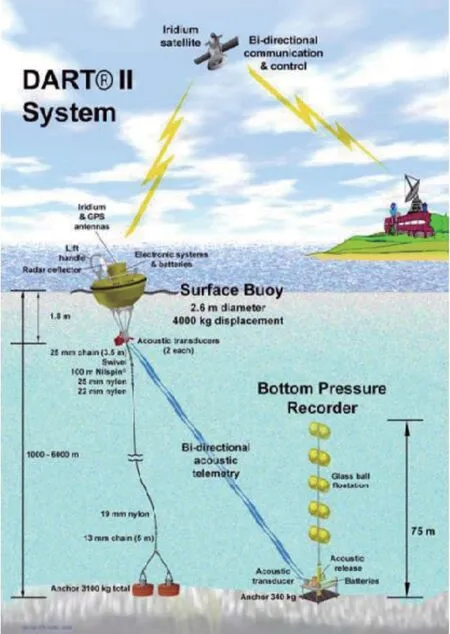
图3 DARTII 系统示意图[8]Fig.3 DARTII system diagram[8]
(1)RAP 是阵列(水听器)接收目标声信号的直接路径,海面散射和海底反射影响较小;
(2)当阵列(水听器)放置在临界深度以深时接收到的环境噪声远低于在临界深度以浅阵列(水听器)接收到的环境噪声;
(3)在中等距离范围以内(40~50 km),当利用RAP监听目标时没有盲区;
(4)对于窄带声源被动定位,基于多途到达角的方法在距离方向上的分辨率比在深度方向上的分辨率高。
现今已有的对于RAP 的环境噪声测量的文章较少,但是其仍对RAP 的研究提供了不少助力。Gaul 等[11]发现在临界深度以下海域的低频(200 Hz 以下)环境噪声比临界深度以上海域的低频环境噪声低约20 dB,这一现象用Snell 定律解释为是由远处(超过200 km)舰船噪声无法穿透到临界深度以下海域造成的。他提出对于放置在海底的声源,可以利用RAP 进行检测,并且当阵列处于RAP 附近时,效果更好。2009年-2011年,美国将RAP 的声传播研究作为实验的一部分,在菲律宾海先后组织了“PhilSea09”和“PhilSea10”两次实验,并有一些研究成果[7,12]。其中,在太平洋的东北部和中北部地区,由于海洋内波、由温度和盐度变化引起海洋部分区域密度相互补偿等因素会导致小范围声速的波动;在研究北太平洋中部和东部远程深海宽带声波传播时,发现即使在深海中,短距离内与海底相互作用的声波明显地影响接收到的信号。Kathleen 等[13]利用全深度布放式垂直线列阵(Distributed vertical line array,DVLA)采集到的数据,分析了环境噪声随深度变化的趋势,结果如图4(a)所示。由图可以看出,100 Hz 以下的频率范围内,4000 m 以深的环境噪声级显著降低。同年,Worcester 等[7]利用“PhilSea10”的实验数据,分析出另一组环境噪声随深度变化的全年平均值,结果如图4(b)所示。实验结果说明,最深处的环境噪声级相比于近海面的环境噪声级要低10 dB 左右,相比于深海声道轴附近的环境噪声级甚至要低15 dB左右。这也是RAP 吸引人们关注的重要因素之一。Shi 等[14]对巴士海峡附近约3500 m 深的海域进行了环境噪声的观测统计,结果如图5 所示。可以看出,随着频率的增大,对应的环境噪声谱级有所下降。尽管该实验未涉及RAP 下的环境噪声观测,但是对直达声区环境噪声的研究分析仍有重大的意义。
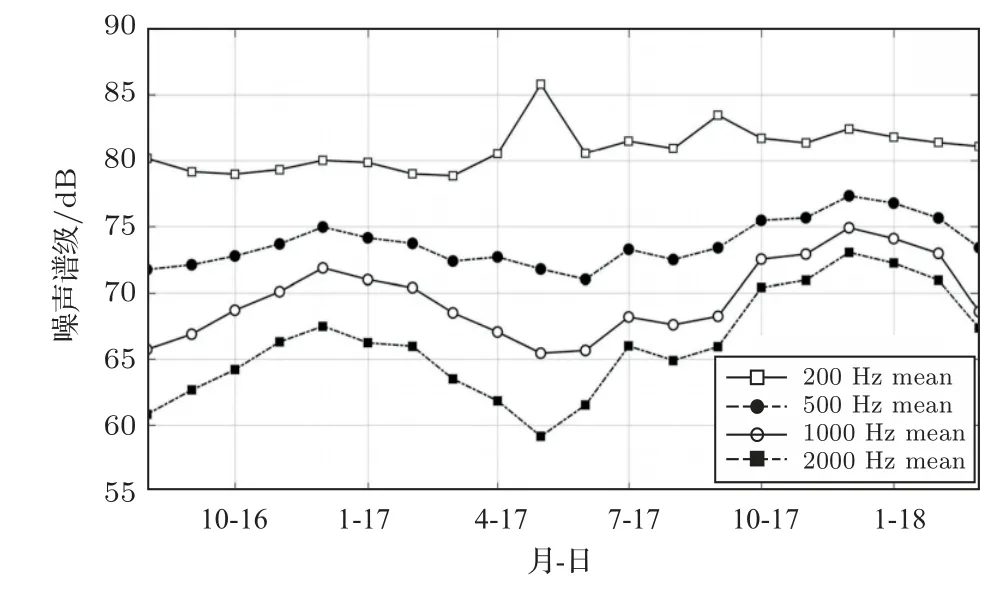
图5 南中国海3500 m 处环境噪声谱级随时间和频率的变化[14]Fig.5 Change of ambient noise spectrum level with time and frequency at 3500 m in the South China Sea[14]
2016年,Vincent 等[15]研究了RAP 下分层扫描的可行性,被认为是与海底大地测量的精确定位相结合的回声测深的延伸[16]。2018年,Duan等[17]利用在菲律宾海进行的RAP 实验,提出了基于海底损失(Bottom loss,BL)的反演方法。该方法由位于海底深处的水听器和一个携带声源的移动船舶组成。通过假设海底模型使得利用反演结果模拟的BL与实测BL一致。因为很难获得海底真实参数作为参考,反演的结果可能会存在一定误差。
声场的垂直相关性为基于匹配场的垂直阵定位提供了基础,同时也为声场的空间增益研究提供了必要的参数,因此关于RAP 声场垂直相关性的研究必不可缺。2013年,Colosi等[18]理论研究了深海垂直相关半径随着频率和距离的变化规律。2017年,Li 等[19]利用爆炸声源对大深度海洋的垂直相关特性进行了测量。测量结果表明,宽带声场的垂直相关系数主要由声源深度和信号中心频率决定,接收阵列(水听器)位置和深度的变化对声场垂直相关性影响很小。此外,Qiu 等[20]人基于射线理论分析了部署于RAP 下的水听器接收的多途到达结构。研究表明,RAP 下的垂直线阵能够对一定距离内的近海面声源实现有效的探测。
以上研究就RAP 的声传播路径、覆盖区域范围、传播损失、垂直相关性等特点展开工作,大量的研究表明,RAP的物理特性对于深海中近距离目标的探测与定位极为有利,结合物理特性开展水下运动目标探测、定位方法研究可行性高。但是国内针对RAP的研究仍缺乏大量的实验观测,该领域的研究仍有较大的发展空间。
3 基于RAP的目标定位方法
现阶段的水声目标定位方法大致可以分为传统水声定位方法与智能水声定位方法。其中,传统目标定位方法是在人为建立的观测模型与声传播固有特性的基础上进行研究,而智能水声定位方法建立在大量的观测实验数据上,利用数据集进行神经网络的训练,从而估计目标位置。本节分别从多途到达结构、频域干涉结构、匹配场等方面的传统定位方法和智能水声定位方法,概述当前RAP下目标被动定位方法的研究进展。
3.1 基于RAP的传统定位方法
3.1.1 RAP下基于多途到达结构的定位方法
RAP 的显著物理特性之一就是水听器接收声信号的多途到达结构。在海洋声学应用中,多途时延值的测量有助于声源定位、海洋声学层析成像和海底声学反演,并且利用小孔径阵列便可以获得明显的多途到达结构,因而受到广泛关注与应用。深海声源定位及其深度估计的常规方法通常都利用水听器阵列接收声源信号的多途时延值、俯仰角等信息与仿真结果进行匹配,从而实现对目标的定位。然而,并非所有的观测平台都能利用匹配多途到达结构的方法进行目标定位。因此,针对不同的观测平台,研究学者提出了与其对应的信号处理方法和目标定位算法。
(1)针对单阵元情况,Yang 等[21]提出了基于时延互相关函数的定位方法。该方法利用不同位置下声源辐射的直达声和海面反射声声场的互相关函数对目标进行测距,且主要的限制来源于接收信号信噪比的大小和声压互相关的时间增量的选择,模型误差对目标参数估计误差起较大作用。此外,Duan 等[22]提出了基于直达波-海面反射波时延的运动声源定位方法。该方法可以仅利用较为稳定的D-SR 峰值信息就可以准确估计运动声源的距离、深度和速度,但是对时延分辨率要求较高且目标必须为运动的。孙梅等[23-24]研究了水平、垂直振速声能的传播损失与声线掠射角、声源距离之间的变化关系,提出了一种基于矢量水听器的水平与垂直振速的能量差估计声源距离的方法。结果表明,该方法对近距离目标测距效果良好。尽管该方法测距精度受方位估计精度影响较大,但其利用声压振速能量差的方法为RAP 下声矢量信号的处理提供了思路。
(2)针对双阵元的情况,杨坤德等[9]提出了基于多途时延差的双阵元深海匹配定位方法。该方法利用两个水听器接收信号之间的互相关函数得到多途造成的时延差信息,与构建的模型计算结果进行匹配从而估计声源的位置。该算法在整个过程中需要人为地提取多途时延差信息,不够智能化。之后,Lei 等[25]提出了基于双水听器互相关函数匹配的目标定位方法。该方法利用稀疏重构来获取信号互相关函数的峰值结构,克服了因为实际信号带宽有限导致互相关函数中距离较近的两个峰值结构叠加的情况,降低了定位旁瓣从而提高定位精度。
(3)针对垂直阵列的情况,Duan 等[26]提出了一种基于多途到达结构的加权子空间拟合匹配场定位方法。该方法利用直达波与海面反射波到达时延在频域上出现明显能量周期振荡这一特性,分析出频域振荡周期与声源的深度有关,从而对声源深度进行估计。王梦圆等结合深海直达声区声传播特性,针对直达声和海底-海面反射声到达时延差随距离变化提出了一种声源距离估计方法[27];针对直达声与海面一次反射波到达时延差随声源深度变化特性提出了一种距离深度联合的目标定位方法[28]。Li等[29]根据“多径时延比”提出了一种深海垂直阵目标深度估计方法。对于基于垂直阵的RAP 目标定位方法而言,其利用了环境与目标在时域与空间上的差异,计算简便且垂直阵布放回收机动灵活,目前仍被广泛使用。
上述方法都与接收声信号的多径到达结构有关,研究内容和侧重点集中在直达声和海面一次反射声到达角度、时延差等。由于海底反射的声信号到达振幅较弱且时间分布很广,通常无法获得。对于远距离目标而言,直达声与海面一次反射声到达时延差较小且难以分辨,声信号到达俯仰角随距离的增加变化缓慢,这就导致对于远距离目标,利用多途到达结构的目标定位方法近乎失效。此外,RAP下基于多途到达时延的目标定位方法对声源深度和声源距离变化比较敏感,而获取声信号的时延信息对信号带宽和信噪比要求较高,适用于对高信噪比的目标进行定位,故基于多途到达结构的深海RAP定位方法仍有待进一步改进。
3.1.2 RAP下基于频域干涉条纹的定位方法
RAP环境下有一种被称为“RAP干涉条纹”的条纹现象:声源做水平运动并发射宽带信号,将布放在临界深度以下海域的单个水听器接收到的信号频谱随声源距离的变化用伪彩图表示,可以看到明暗相间的条纹[4],仿真用的水文环境如图6 所示,结果如图7 所示。围绕RAP 下的这种干涉现象,许多专家学者进行了相应的理论分析和实验研究。
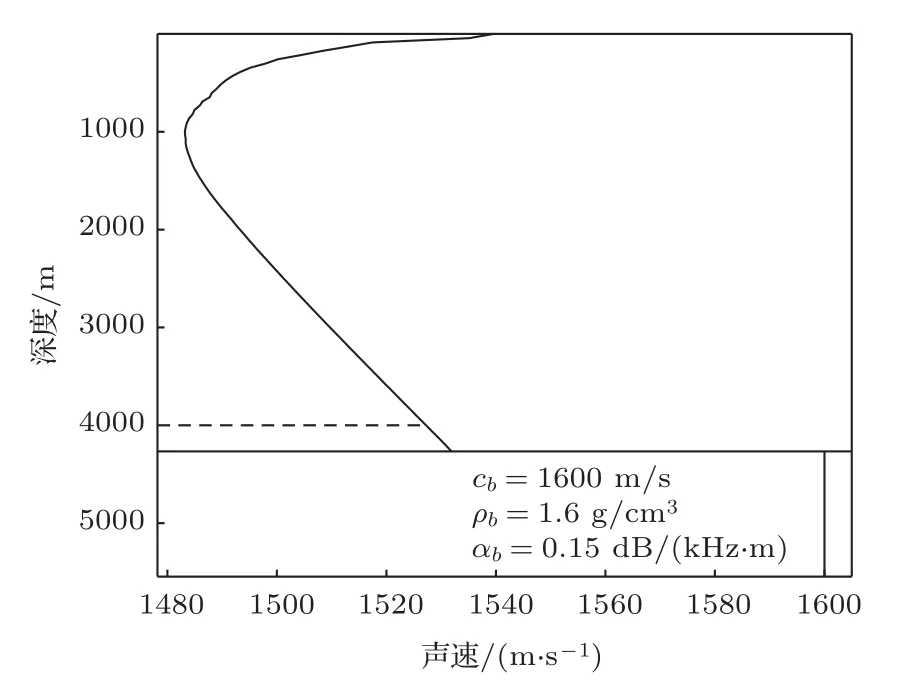
图6 仿真时的声速梯度及海底参数Fig.6 The SSP and seabed parameters in simulation
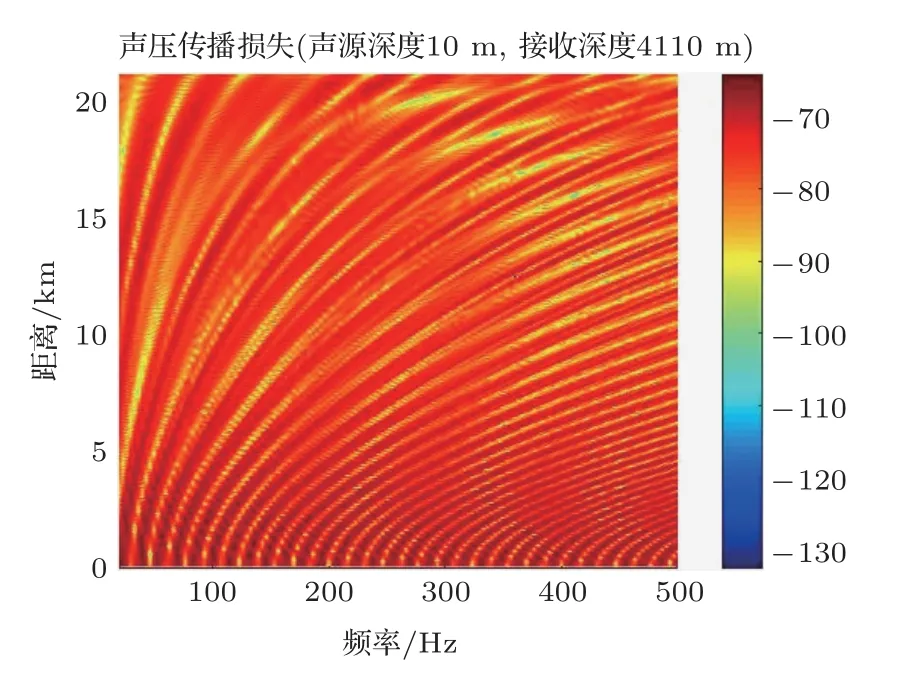
图7 频域干涉结构图Fig.7 Frequency domain interference structure
2013年,McCargar等[30]研究发现由直达声和海面反射声作用的频域干涉周期和声源的深度有关。基于这一规律提出了一种基于修正傅里叶变换的单频信号目标深度估计方法并能区分表面声源和水下声源。之后,Kniffin 等[31]对该上述测深方法的性能及限制进行了研究,发现海面起伏对接收声场的空间干涉结构影响较大,对判决结果造成较大影响。尽管该方法仍处于理论仿真阶段,但这种深度判别技术不需要了解具体的海洋环境便可以对声源深度进行判决,对辨别表面声源和对水下声源的探测都有指导意义。2017年,李辉[2]利用傅里叶变换将频域干涉振荡周期与目标径向运动速度信息和目标深度信息关联起来,提出了基于深海大深度声场互相关特性的单水听器目标定位方法。此外,Duan 等[32]使用简正波的射线描述方法,结合“Lloyd Mirror”干涉原理揭示了劳埃德镜中明暗条纹形成的机理,提出了一种定量计算深度-距离干涉条纹分布的方法。Qi 等[33]提出了一种基于简单的虚源理论表达式来描述从水下声源到近海面的直达声和海面反射声干涉结构的方法,并利用放置在海底附近的单矢量水听器对声源深度进行估计。
翁晋宝等[34]指出,深海直达声区内的对干涉结构主要贡献的是声源辐射的直达声与海面一次反射声,频率最小干涉周期为直达声和海面一次反射声之间的时延差的倒数。随着目标距离的增加,时延差逐渐减小,干涉周期增加,从而影响估计精度。此外,干涉条纹易受环境因素的影响导致干涉条纹模糊甚至被背景噪声覆盖,进而影响后续处理。针对这种情况,李浩琦等[35]利用了Gabor 滤波的方法对干涉条纹图像进行增强去噪,仿真结果表明,该方法明显地增强了条纹的清晰度,有利于对目标的参数提取。唐浩等[36]提出一种基于变窗长的短时傅里叶变换的干涉条纹增强方法,实验表明,该方法与固定窗长相比所获得的混响干涉结构更加清晰。因此,从增强干涉条纹方面入手,降低背景噪声的影响,亦不失为一种提高目标信噪比的方法。综上所述,利用声场频域干涉结构对远程低信噪比的目标进行定位的相关技术仍需进一步的研究。
3.1.3 其他RAP下的传统目标定位方法
20 世纪70年代至今,水声信号处理方法的一个重要进展就是将水声物理与信号处理方法相结合,产生了匹配场处理(Matched-field processing,MFP)技术。1985年,Fizell 等[37]在北冰洋水域首次利用MFP 方法进行声源远距离定位并取得较好效果,由此MFP 技术逐渐成为水声信号处理研究的热点课题。RAP 下的目标被动定位可以通过使用信号的到达时延或声强的MFP 方法实现。Lei等[38]通过匹配两个水听器接收信号的互相关函数输出来定位声源位置。然而,该方法要求两个同步水听器之间要有很大的间距。结合声强对声源深度和频率的变化非常敏感这一特征,Yang 等[39]提出了一种在深海中利用非同步垂直阵列估计声源深度和距离的方法。西太平洋的实验结果表明,该方法可以利用非同步垂直阵列对固定声源进行定位。
尽管MFP 方法被广泛研究,但在实际应用中仍面临着诸多挑战。最突出的问题在于海洋信道是时变空变的,并且信道的传输函数类似于一个“梳状滤波器”[40],这就导致仿真声场和测量声场之间并非完全一致,从而影响匹配场定位算法的性能。为了解决失配问题,环境聚焦MFP 和贝叶斯匹配场定位等一些改进的MFP 方法孕育而生,但是这些方法又增加了实时处理的难度,不便于实时实现。
此外,当目标辐射声信号较弱时,基于RAP 的被动探测作用距离变短甚至无法检测到目标。基于这一点,刘雄厚等[41]提出一种基于RAP 的主动探测方法,并对其探测性能进行初步评估和分析,根据主动声呐方程将回声余量作为主动探测方法性能预测的指标,建立了基于RAP的主动探测性能评估模型,为RAP下的声呐探测提供了一个思路。但是,该方法所建立的评估模型仅考虑了噪声占优情况下基于大深度的主动声呐探测性能,忽略了海面混响、深海信道起伏、噪声场起伏等在实际探测时所面临的不利因素。2014年,王鸿吉等[42]利用RAP的声传播特性,对水雷声引信系统进行了改进,使得水雷布置在深海区域也可以稳定地对其进行引信控制和状态监测。之后,他利用时间反转镜技术,研究提出了一种基于水平线阵和垂直线阵的目标定位方法[43-44]。
现有RAP 下的传统目标定位方法或多或少都结合深海声信号的传播特性开展,研究方法多基于标量垂直阵和单矢量水听器。标量垂直阵因自身指向性的缺陷,只能对目标进行测距和测深,无法进行目标的方位估计从而无法对目标绝对位置进行定位;单矢量水听器可以对目标进行测向,但是无法抑制信号的多途效应。矢量水听器阵列既具有良好的抗多途效果,又可进行目标方位估计,因此RAP 下利用矢量垂直线列阵进行目标探测和定位会成为今后深海研究发展的一个热门方向。
3.2 基于RAP的智能定位方法
水声环境中,声源激发的声场随距离、深度和频率的改变而改变,对应的信道响应也不同。此外,不同距离的声场干涉结构也不尽相同。因此,需要阵列信号的采样协方差矩阵等包含水声信号特征的输入进行训练[45],为智能水声定位算法的实现提供数据支撑。
机器学习早在20 世纪90年代就被应用于水声目标被动定位。1991年,Steinberg 等[46]利用神经网络对均匀介质中的点声源进行定位。同年,Ozard等[47]将神经网络运用于MFP 方法中,仿真研究了对目标距离进行测量并对其深度进行判决。之后,一些学者研究了基于机器学习的海洋声传播特性和海底参数反演。总之,由于计算条件的限制且缺乏高效的训练算法,在之后较长的一段时间,机器学习在水声应用方面发展较为缓慢。
随着研究的深入和近些年机器学习理论和技术的进步,加之计算机硬件技术的飞速发展,研究人员又将目光聚焦到智能水声定位方法上,相关研究和文章也层出不穷。因RAP 的研究开展较晚,目前RAP 下的智能水声定位方法研究仍然较少。2017年,Niu 等[48-49]通过海试实测声场数据验证了一类基于机器学习算法的水下声源定位方法的定位效果,2018年,Wang 等[50]将实测数据作为数据集,提出了基于广义回归神经网络的声源定位方法。Huang 等[51]利用仿真的声场数据对深度卷积神经网络进行训练,从而实现对声源的定位。2019年,Liu等[52]在深海直达声区内利用卷积神经网络的多任务学习方法对声源距离进行估计。此外,Liu 等[53]提出了一种基于卷积神经网络的深海声源定位方法,该方法将声源定位问题作为回归问题进行求解,所提出的神经网络由信号的归一化协方差矩阵作为输入进行训练,从而预测声源位置。Liu 等[53]利用西太平洋的实验数据对该方法进行验证,结果表明算法在一定的范围内具有较好的定位性能。
对于RAP 下的智能水声定位方法而言,机器学习的训练过程需要大量的实验数据来提取数据特征,但是获得这些数据既费时又昂贵。对此,一些学者提出可以构建海洋环境声场模型来克服缺乏测量数据这一问题。然而,这种方法的准确性取决于构建的环境模型声场和实际海洋声场的一致程度,而且这种方法可能只在与神经网络训练环境相似的区域有效。对于不熟悉的区域,既没有足够的声场数据,也没有适应性强、鲁棒性好的环境声场模型生成样本数据用于训练,这也是现有的机器学习和深度学习在水声领域面临的问题。此外,如何优化选择各种深度学习神经网络并有效融合RAP的物理特性、如何有效利用典型海域实测数据等都是RAP 机器学习智能定位方法研究方面亟待解决的问题。尽管智能水声定位方法目前存在诸多问题,但机器学习方法在水声被动定位中的应用潜力和工程化应用前景不可忽视,该研究方向正处于快速发展时期,并深刻影响着水声信号处理领域的发展方向。
4 结论
随着水声技术研究的不断深入,水声物理、信号处理与海洋环境的紧密结合是水声技术发展的必然趋势[54]。RAP作为重要的深海声道之一,其声传播特性及物理特性为深海中近程目标的无盲区探测和定位提供显著优势。正如前文所言,现有的研究主要是揭示RAP 下声源激发声场的声学物理机理和变化规律,结合时-频域信号处理的方法进行目标定位,但是仍存在一些亟待解决的问题。例如,如何在一定的海洋环境失配情况下,基于深海RAP特有的声场传播特性及多途到达结构特征,抑制水面多目标的强干扰,实现对水下弱目标的探测及有效定位是重点及难点。针对RAP 机器学习智能定位方法,如何研究环境适应性强、鲁棒性好的深海环境声场模型,解决深海RAP 声数据样本少,提高机器学习在低信噪比情况下的适用性等问题。所以,基于RAP 的目标定位需要进一步向低频、高处理增益、环境适配性好等方向发展。相关侧重点可以从以下几个方面关注:(1)研究RAP 下基于矢量水听器阵列的目标定位方法,抑制强干扰并对弱目标进行定位。矢量水听器阵列除了拥有声压水听器阵的优点外,还可以对目标进行方位估计、通过声压振速联合处理抑制各项同性噪声、相同阵列孔径下可对更远的目标进行探测与定位。此外,RAP 下的标量垂直阵目标定位技术已较为成熟,这就为矢量垂直阵的相关应用提供良好基础。(2)研究复杂海洋环境中不同角度扇区声场频率-距离干涉结构的各向异性,从而发展可以突破声场纵向相关半径的大孔径阵列处理技术与弱目标信号增强技术[55]。(3)研究基于机器学习的环境自适应的目标探测定位技术,发展环境适应性更高的定位方法等。
