激光超声的多模式合成孔径聚焦成像仿真分析*
2022-09-16孙凯华黄姝珂周英平
钟 华 孙凯华 孙 铭 黄姝珂 周英平
(1 中国工程物理研究院机械制造工艺研究所 绵阳 621999)
(2 南京理工大学理学院 南京 210094)
(3 绵阳第一军事代表室 绵阳 621900)
0 引言
激光超声[1-2]可利用激光来激发和检测超声,具有宽频带、高分辨率、非接触式激发和检测、同时激发多种模式波等特点,可对具有复杂几何外形的构件进行检测,并可用于有毒、高温及辐射等恶劣环境中,是一种极具发展和应用潜力的超声检测技术。
激光超声可用于表面缺陷和内部缺陷检测,目前利用激光超声表面波和兰姆波来检测表面或亚表面缺陷[3-4]的方法已具备较高的分辨率和检测效率,并逐步从实验室研究走向工程应用。但利用激光超声体波检测内部缺陷时,还存在反射信号弱且信噪比较差的问题,为解决该问题,诸多研究人员对提高激光超声检测信号灵敏度和信噪比的方法进行了研究。总的来说,可以从改善激发效率、提高探测灵敏度、后处理成像算法这3个方面入手。
改善激发效率可从改变激发模式(如增大激光能量[5]、添加约束层[6]等)以及对光源进行时空调制[7-9]来实现。增大激发光能量虽然能增加激光激发超声的幅值,但也会对材料表面产生损伤;添加约束层则会对材料表面产生污染。对光源进行时空调制可以增加激发信号信噪比但同时也会增加实验装置的复杂性和成本。探测灵敏度的提高可通过选择合适的探测方法来实现。光学探测法可实现远距离非接触式探测,但其灵敏度较低且要求样品表面光滑。因此有研究人员提出激光激发、非光学探测法[10]探测的耦合式激光超声,虽然非光学探测方法灵敏度更高,但其需要接近(如电磁超声换能器和空气耦合式换能器)或接触(如压电换能器)样品表面的使用要求会限制应用场合。利用后处理成像算法来提高缺陷图像的信噪比和分辨率也是一种有效的方式,如全聚焦[11-14]和合成孔径聚焦成像技术(Synthetic aperture focusing technique,SAFT)[15-18]等。SAFT 与传统激光超声B 扫所需的数据量相同,但使用SAFT 处理后能得到信噪比和分辨率更好的图像,从而更加直观地显示缺陷位置和尺寸等信息[18]。而全聚焦所需处理的数据量远大于SAFT,它虽然能获得质量更好的图像,但检测效率较低。因此,综合考虑成像质量和成像效率,本文选择SAFT来提高图像信噪比。
利用SAFT 对缺陷成像时,会存在其他模式波干扰而引起的伪像,以及因灵敏度分布不均导致的检测盲区等问题。针对这些问题,Blouin等[18]将激光超声与SAFT 相结合,使用激发探测同点的数据采集方式在融蚀机制下实现了对内部缺陷的准确成像;李俊燕等[15]在热弹机制下,使用固定激发多点探测的SAFT 实现了对内部缺陷的检测,但未考虑激光超声的方向性;Stratoudaki 等[11]使用基于激光超声的全聚焦算法对样品内部缺陷成像,考虑了激光激发超声、测振仪检测超声的方向性,但未考虑缺陷反射超声的方向性。
本文在此基础之上,提出了一种基于激光超声的多模式SAFT 组合成像方法,该成像方法是基于激光超声和SAFT的,首先根据激光激发超声、干涉仪检测超声和缺陷与超声相互作用后的声场分布,得到成像区域的声场灵敏度图,并综合考虑声场灵敏度和超声波传播特性(波速、幅值等),使用不同模式的缺陷反射超声波(如LL 波、SS 波等)来对不同区域进行组合成像,从而减少激光超声成像中的盲区和伪像等问题。为验证该方法的可行性,建立了数值计算模型,利用仿真数据结合SAFT 实现了对样品内部缺陷的多模组合成像,仿真结果与理论基本一致,初步验证了该方法的有效性。
1 基本原理
1.1 SAFT
SAFT 源于合成孔径雷达,后被Erikson 等[19]用于超声成像,是常见的超声成像技术之一。其基本原理是将一系列单个小孔径换能器结合起来代替一个大孔径换能器,以达到提高检测横向分辨率的目的。传统合成孔径采用的数据采集方式为同点激发探测扫描[18],其基本原理如图1(a)所示,其中di0为从激发点到缺陷的距离,也是探测点与缺陷的距离,xi为扫描步长。使用该方法需将超声激发点和探测点重合,然后进行扫描激发和探测,在激光超声中,探测信号会受到激光辐照在样品表面所引起的热膨胀影响,给数据处理带来困难。
采用激发探测分离的扫描激光线源法[15]便可避免上述问题,该方法的基本原理如图1(b)所示,其中di1、di2分别为激发点和探测点到缺陷的距离。该方法需固定探测点,然后扫描激发点来进行数据的采集,可有效避免热膨胀的影响,还能保证探测信号的灵敏度。
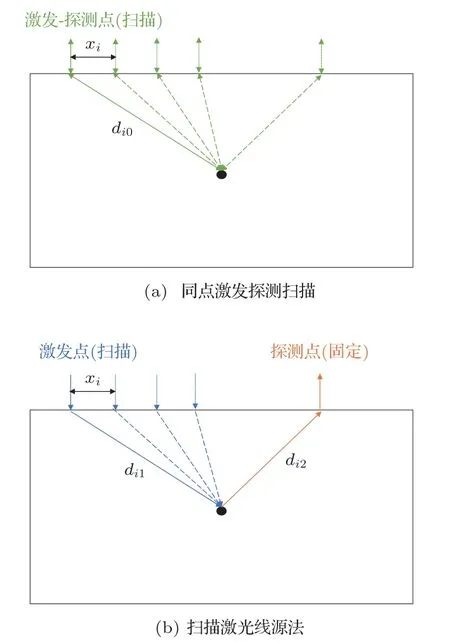
图1 数据采集方式原理图Fig.1 Schematic of data collection methods
基于扫描激光线源法的合成孔径基本原理可用式(1)表示:

其中,I(x,z)为聚焦点(x,z)处的幅值,N为激发源的扫描步数,v1、v2分别为所选模式波在样品中的传播速度,di1和di2分别为激发点和探测点与聚焦点之间的距离。当聚焦点(x,z)为缺陷时,探测光在t=di1/v1+di2/v2时刻探测到的信号S(Mi,t)将会出现一个由缺陷反射引起的波峰,通过叠加可增强重建图像中点(x,z)位置的幅值,其余无缺陷点的幅值则无明显变化,与超声B 扫结果相比实现了倍的信噪比提升,提高了缺陷图像的对比度和横向分辨率。
使用单模式波进行SAFT 时,会遇到因其他模式波干扰引起的伪像以及由激光超声方向性导致的检测盲区等问题,为解决这些问题,本文提出了一种基于激光超声的多模式SAFT 方法,下面将介绍多模组合方法以及模式选取的规则。
1.2 声场灵敏度分布与多模组合成像
声场灵敏度分布是多模组合成像中成像模式选取的重要依据之一,因此,首先介绍声场灵敏度分布。利用激发探测分离的激光超声体波对内部缺陷进行检测时,样品内部某一点(x,z)处的声场灵敏度可用式(2)表示:
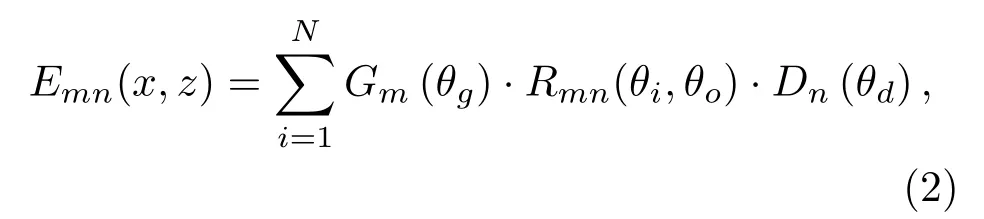
其中, 下标m= S 或L 表示激发横波或纵波,n= S 或L 表示探测横波或纵波,N为扫描点个数,Emn(x,z)表示点(x,z)处的声场灵敏度,θg表示该点与激发点法向的夹角,θd表示该点与探测点法向的夹角,Gm(θg)表示激光激发超声波的方向性,Rmn(θi,θo)表示缺陷反射波的反射系数,其中θi和θo分别表示超声波在缺陷表面的入射角和反射角,Dn(θd)表示干涉仪检测超声波的方向性。由式(2)可知,声场灵敏度分布与激光激发超声的方向性、干涉仪检测超声的方向性以及超声波与缺陷作用后的声场分布有关,声场灵敏度幅值越大,则信号幅值越强。
激光激发超声和干涉仪检测超声的方向性可用式(3)和式(4)表示:
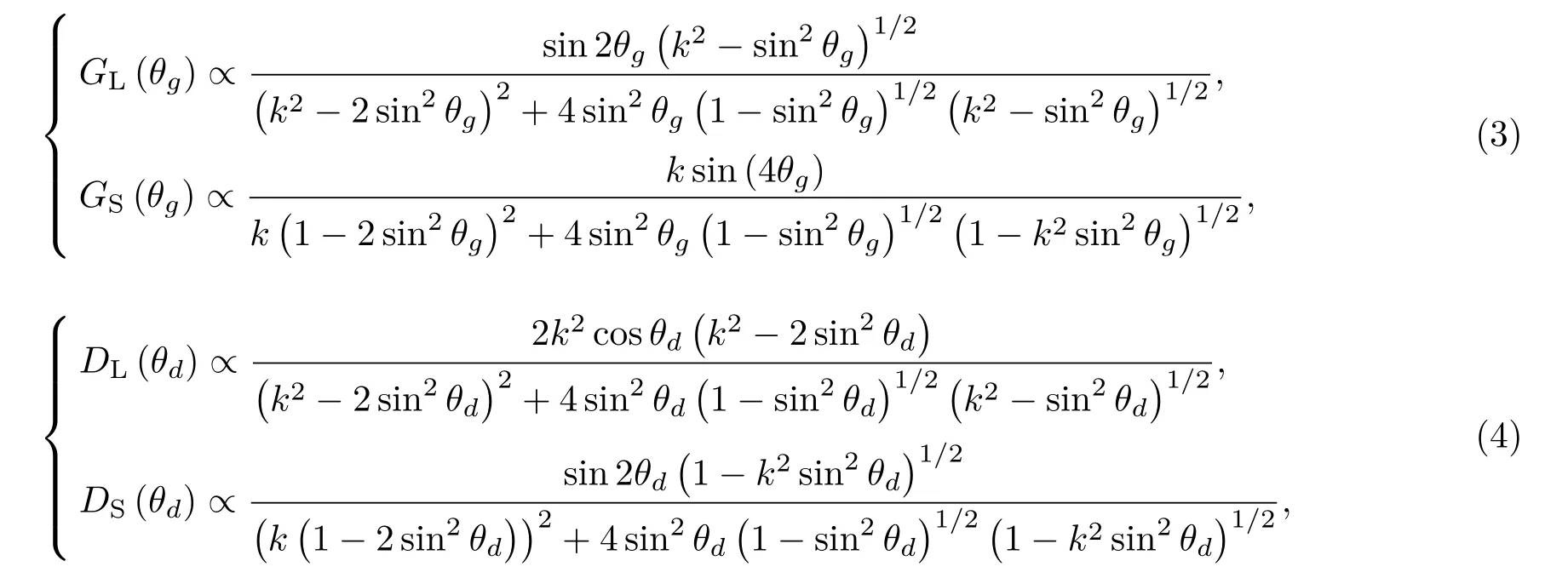
其中,式(3)为热弹机制下激光激发纵波和横波振幅与角度的关系[2],式(4)是由面外点载荷引起表面位移的纵波和横波分量与角度的关系[11,20],也可以用来描述探测方向性,下标L、S 分别表示纵波和横波,k为样品中纵波和横波的波速之比。
根据式(3)、式(4),可画出方向性图,如图2所示。
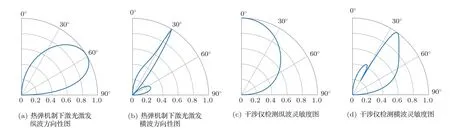
图2 方向性图Fig.2 Directivity pattern
缺陷反射的声场分布也具有方向性。根据超声波的传播原理,当超声波以一定角度传播到两种材料的界面处时,会发生反射和折射并产生新的波。界面入射示意图如图3 所示,假设样品内部有一圆形孔洞缺陷位于远场区域且缺陷尺寸远小于声波传播路径的长度,当激发点、探测点和超声波模式确定时,必有一超声波从激发点G1入射到该圆形孔洞缺陷表面上一点H1并反射,且反射超声波被探测点D1接收。
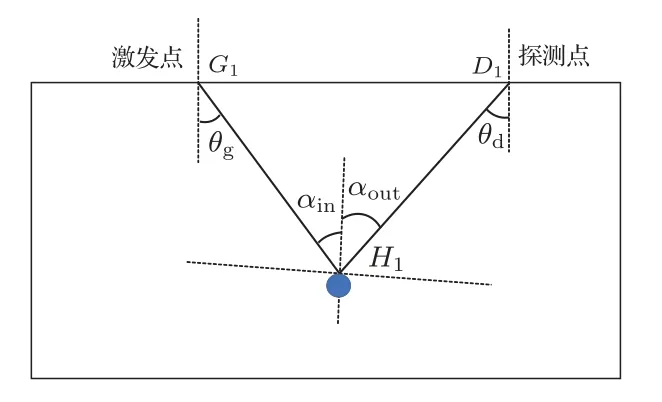
图3 界面入射示意图Fig.3 Schematic of interface incident
对于理想的固-气结合面,若将质点速度和应力代入连续条件,可得反射和散射系数矩阵[21]如下:

式(5)中,Rf为反射和折射系数矩阵(与入射角、波速和频率有关),它被定义为反射(折射)波与入射波的振幅之比,M是与反射角、折射角、波速和拉梅常数有关的矩阵,a是与入射角、反射角、波速和拉梅常数有关的矩阵。
对于横波和纵波入射,M保持不变,均为式(6):
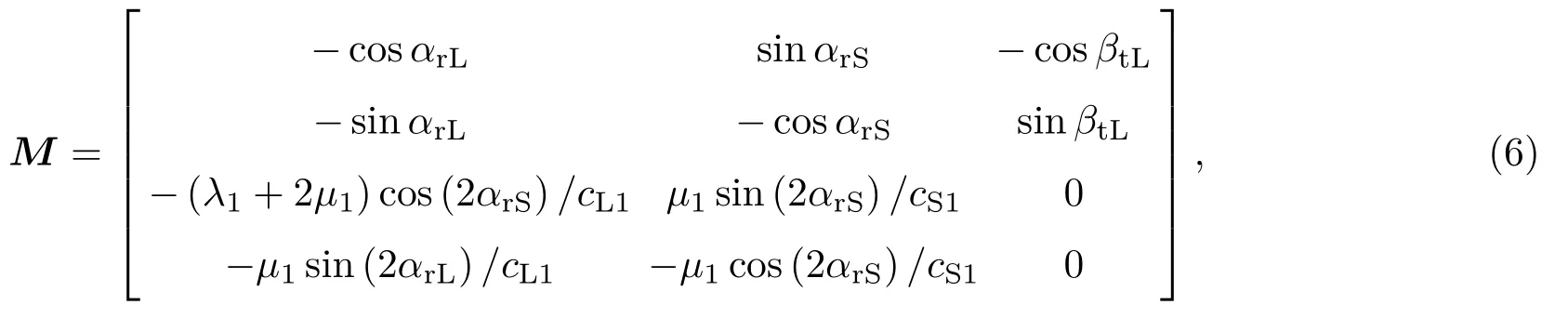
其中,λ1和μ1为样品材料的拉梅常数,αrL、αrS、βtL分别为反射纵波、反射横波和折射纵波的角度,cL1和cS1分别为样品中纵波和横波的传播速度。
对于横波入射,有

其中,RSL、RSS分别为横波反射纵波、横波反射横波的反射系数,DSL为横波折射纵波的折射系数。
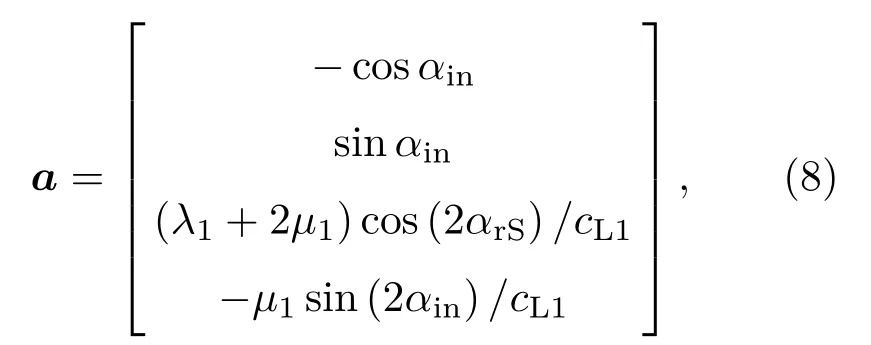
其中,αin为入射波的角度。
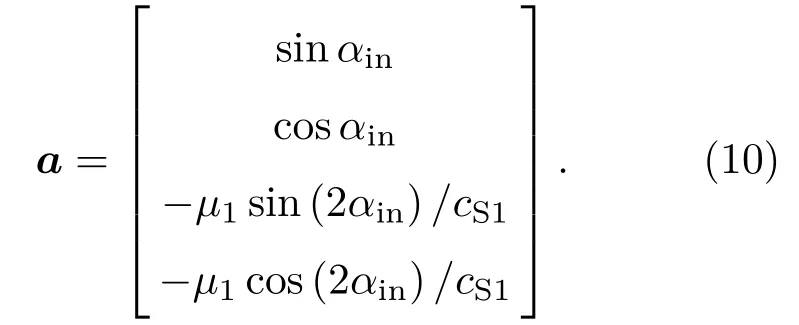
对于纵波入射,有

其中,RLL、RLS分别为纵波反射纵波、纵波反射横波的反射系数,DLL为纵波折射纵波的折射系数。
若给定入射波模式、材料参数及超声波传播路径,根据式(5)~(10)就可求得RSL、RSS、RLL、RLS,由此可画出缺陷反射波的声场分布图,如图4 所示。值得注意的是,图4(d)中由于横波转纵波存在第三临界角,当反射角度大于第三临界角时横波会发生全反射,此时横波反射纵波的幅值为0。

图4 不同模式反射波反射系数图Fig.4 Reflectivity coefficient image of different waves
将上述3 种方向性耦合,可得4 种模式波的声场灵敏度图,如图5所示,图中横轴表示x坐标,纵轴表示z坐标,颜色表示幅值强弱,数值见右侧图例。
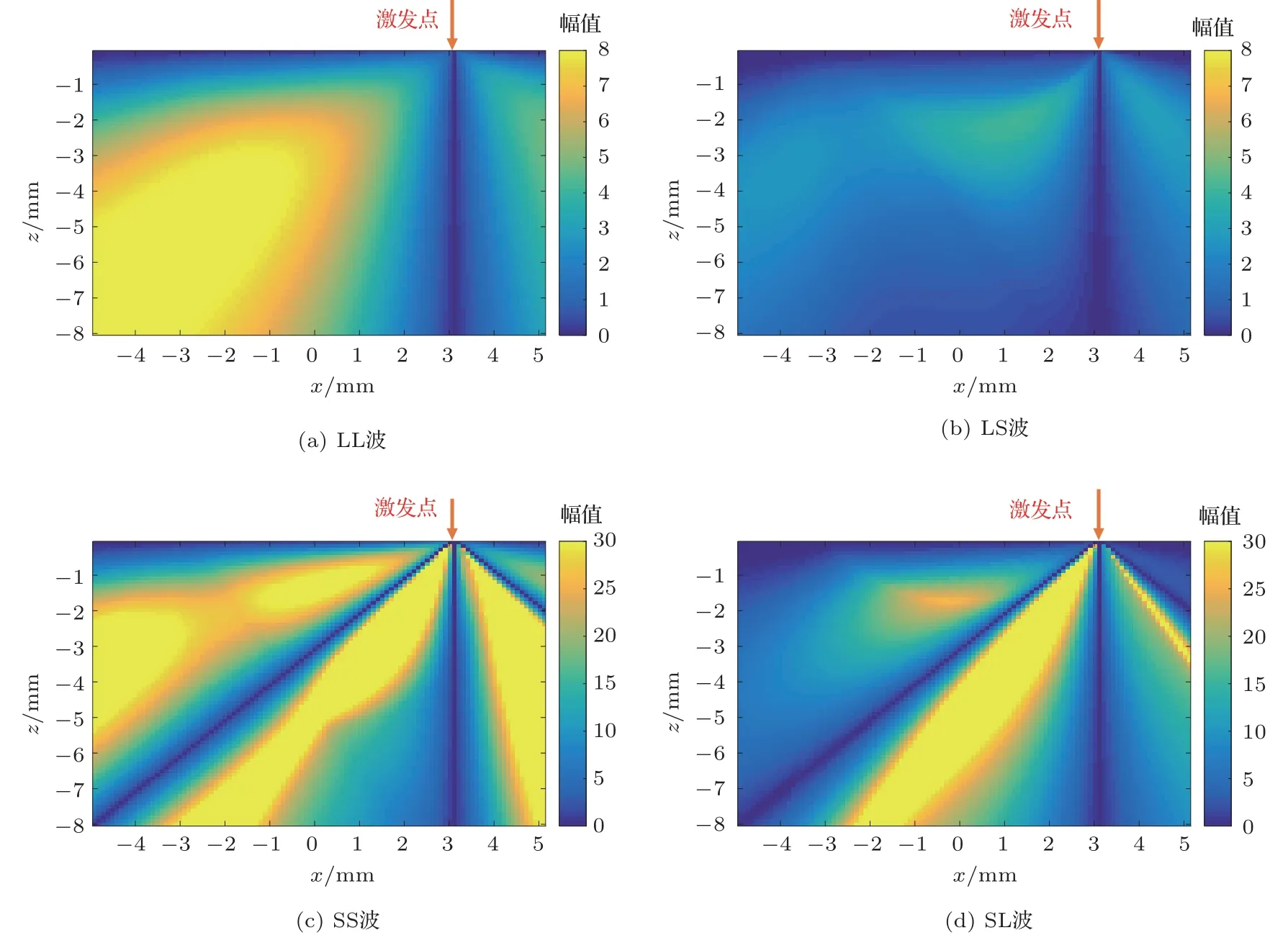
图5 不同模式波成像灵敏度图Fig.5 Sensitivity images of different waves
灵敏度图是根据选定的激光超声扫描方式进行计算的。在该灵敏度图中,激发点位于x=3 mm处,探测范围从x=-5 mm 开始,在x= 5 mm 处结束,步长为0.1 mm。由图5可知,不同模态的超声波具有不同的灵敏度分布,在相同显示范围下,SS波灵敏度优于SL波,LL波灵敏度优于LS波。在LL波和LS 波灵敏度图中有一个线状盲区,SL 波和SS波灵敏度图中有3 个线状盲区,这是由固定的激发光位置以及热弹机制下激光激发超声波的方向性引起的。
多模组合SAFT方法的具体成像过程如下:
(1)依据样品尺寸和待测区域确定激光超声的扫查方式(数据采集方式)与扫描路径,并根据样品材料确定超声波的声速。
(2)根据第一步中确定的扫查方式计算成像区域的声场灵敏度图(通过耦合激光激发超声、干涉仪检测超声和缺陷反射超声的声场分布得到)。
(3)综合考虑声场灵敏度分布和不同模式超声波的特性(如传播速度、幅值等),选定不同成像区域用于成像的超声波模式,确定多模式组合成像的方案,超声波模式的选择是通过设定合成孔径算法公式(式(1))中超声波传播速度v1和v2来实现的。
(4)使用第一步确定的扫查方式和路径得到回波数据,并根据第三步选定的各区域成像的超声波模式进行多模组合SAFT成像。
2 数值计算研究
为对上述基于激光超声的多模式SAFT 方法进行验证,采用有限元方法进行数值模拟。基于热弹理论,描述激光超声在各向同性材料中的热弹耦合方程如下[2]:
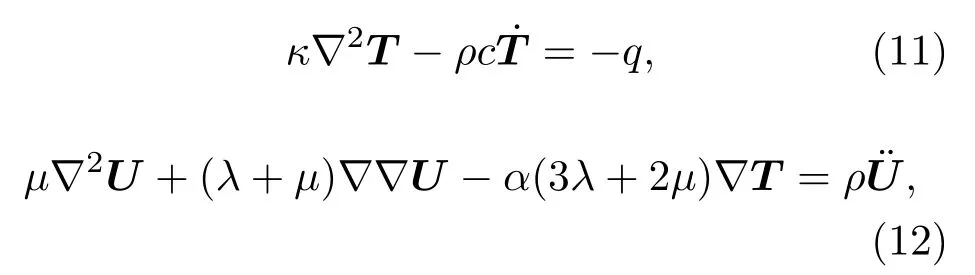
其中,U和T分别表示材料位移矢量和温升,κ为材料热传导系数,ρ为材料密度,c为比热容,q为激光热源,λ和μ为材料拉梅常数,α为材料热膨胀率。
将激光能量在x方向上视作高斯分布,在y方向上视作均匀分布,由此可将三维问题简化为一维平面应变问题。由于金属材料的光吸收系数很大,可进一步将激光热源等效为边界热源,其函数q可用式(13)表示:

其中,I0为入射激光中心处的峰值功率密度,R为样品的反射率,a0为激光束的半宽度,t0为激光脉冲宽度。
本研究使用的数值计算模型如图6 所示,模型大小设置为10 mm×8 mm,z为缺陷上表面到样品上表面的距离,采用“固定激发点,多点探测”的数据采集方式,将激发光固定在xG= 3 mm 处,探测范围从xD0=-3 mm开始到xG=3 mm 结束,步长为0.05 mm,xd为缺陷圆心的横坐标,d= 1 mm为圆形孔洞缺陷的直径。

图6 数值计算模型示意图Fig.6 Schematic of the numerical calculation model
本研究中共设置了9 个成像区域和9 个缺陷(侧边孔,直径d=1 mm,一个样品中只含有一个缺陷),其具体信息如表1 及图7(a)所示(为去除表面波引起的伪像,成像时不包括蓝色矩形区域),共需进行9 次数值计算获得9 个不同位置缺陷的回波数据用以成像。
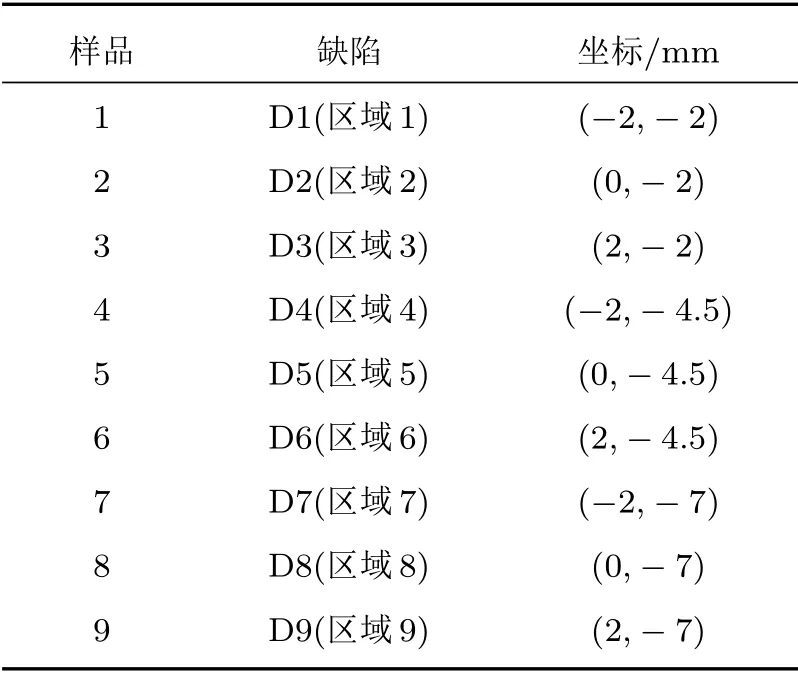
表1 侧边孔缺陷参数Table 1 Parameters of side drilled holes
本研究所用样品材料为铝,其材料属性如表2所示,激光源参数如表3 所示。在计算前,对数值计算过程进行如下设置:
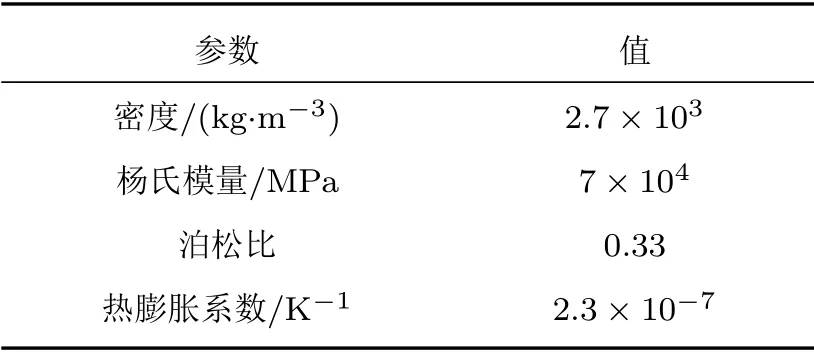
表2 铝样品材料属性Table 2 Material properties of Al sample
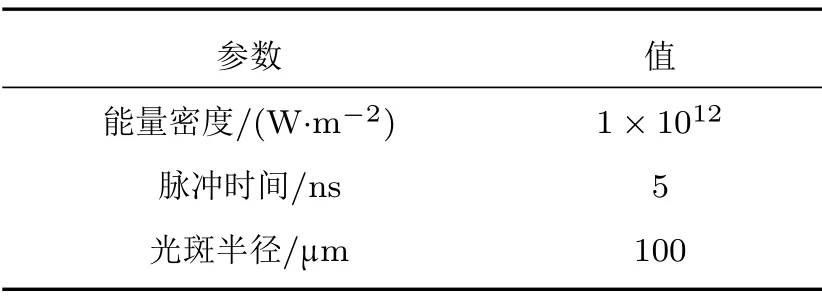
表3 激发光参数Table 3 Parameters of excitation laser
(1)将数值计算模型的左、右、下边界设置为低反射边界,避免底面和两侧面反射波的干扰,可将模型视作半无限大平面。
(2)将上述“固定探测点扫描激发点的扫描激光线源法”改为“固定激发点,多点探测”,由于声波的传播路径可逆,所以这两种方法在一定程度上是等效的。采用“固定激发点,多点探测”的方法,可通过一次计算获得一组完整信号,效率更高。
(3)数值计算时,最小网格尺寸(Le)和最小时间步长(Δt)需满足式(14)[2],其中fmax为激光激发超声波的最高频率,λmin为激光激发超声波的最小波长,c为波速,可由λmin算得。激光激发区域和缺陷附近区域使用自由三角形网格,其余区域使用映射,如图7(b)所示,最小网格尺寸均设置为3 μm,最大网格尺寸均设置为50 μm。时间步长设置为1 ns,总计算时间为8 μs。
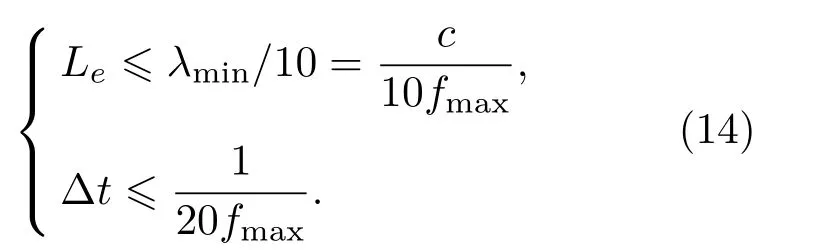
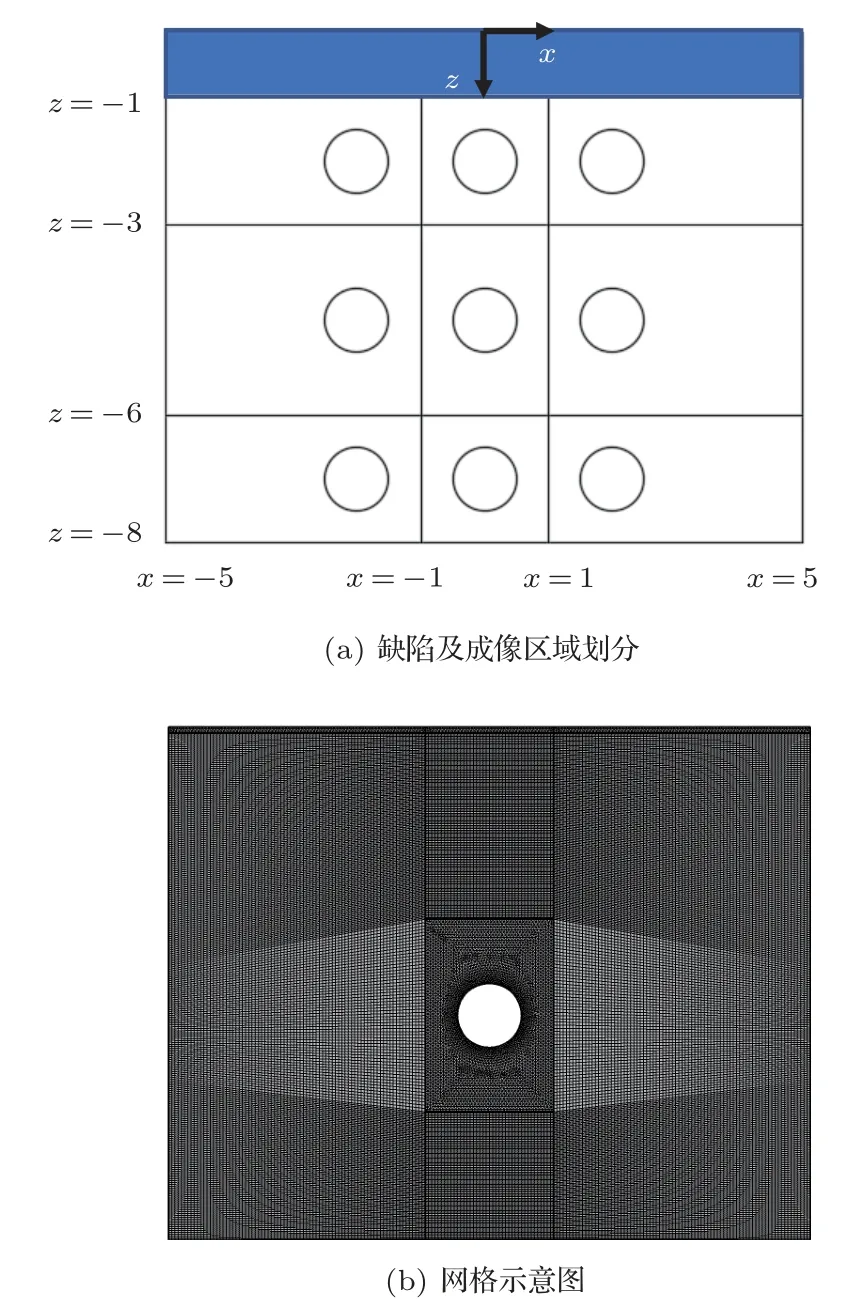
图7 示意图Fig.7 Schematic diagram
3 结果与讨论
图8(a)和图8(b)分别为含缺陷5 和不含缺陷5数值计算后所得的回波B 扫图,横轴为探测点位置,纵轴为传播时间。图中的d-L、d-R 分别表示直达掠面纵波和直达表面波,LL、LS、SL 和SS 分别表示缺陷反射纵波转纵波、缺陷反射纵波转横波、缺陷反射横波转纵波、缺陷反射横波转横波。从图8(a)中能模糊看到LS、SL 和SS 波,而图8(b)中不能看到缺陷反射信号。由于在两次数值计算中,除是否包含缺陷外,其他参数完全相同,因此,将两幅B扫图相减便能得到清晰的4 种模式缺陷反射波,如图8(c)所示。
从图8(c)中缺陷反射回波的出现可判断样品内部存在缺陷,但无法确定缺陷的位置。为获取缺陷的更多信息并分析不同模式波对缺陷的成像效果,分别对缺陷D1~D9进行了4 种模式波的SAFT重建,所得结果如图9~图12所示(图中的蓝色圆圈代表缺陷的位置和尺寸)。
图8 B 扫图Fig.8 B-scan images
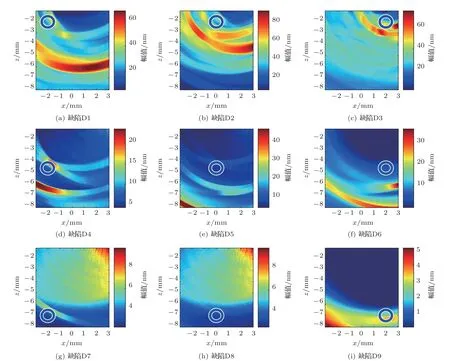
图9 缺陷D1~D9 LL 波重建图Fig.9 SAFT images of defect D1-D9 using LL wave
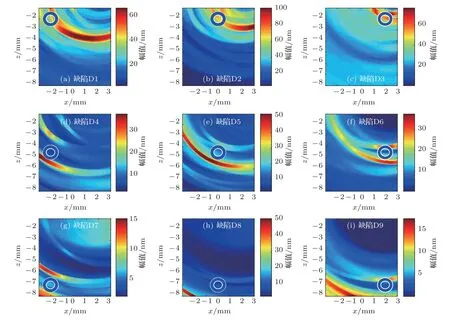
图10 缺陷D1~D9 LS 波重建图Fig.10 SAFT images of defect D1-D9 using LS wave
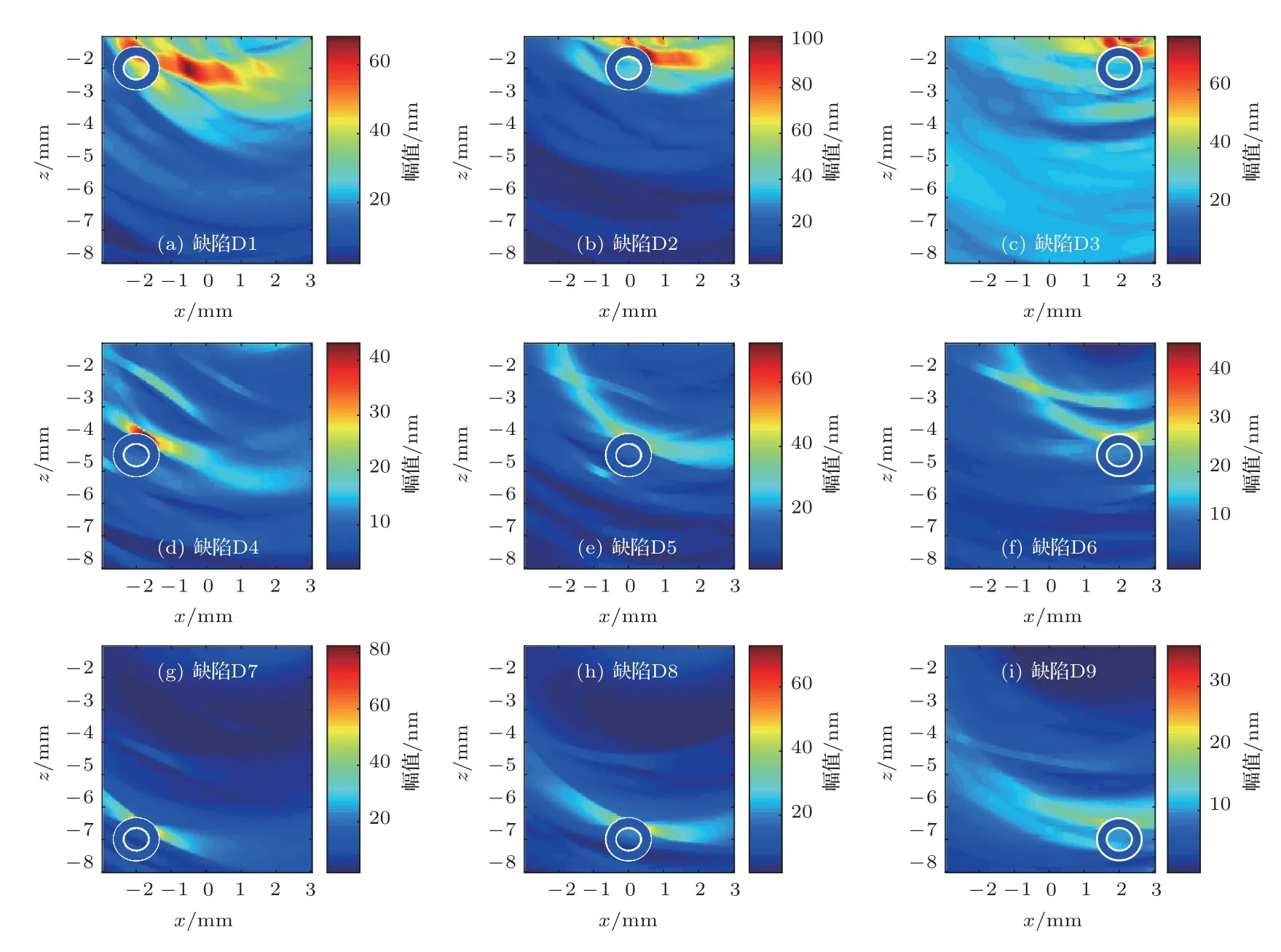
图11 缺陷D1~D9 SS 波重建图Fig.11 SAFT images of defect D1-D9 using SS wave
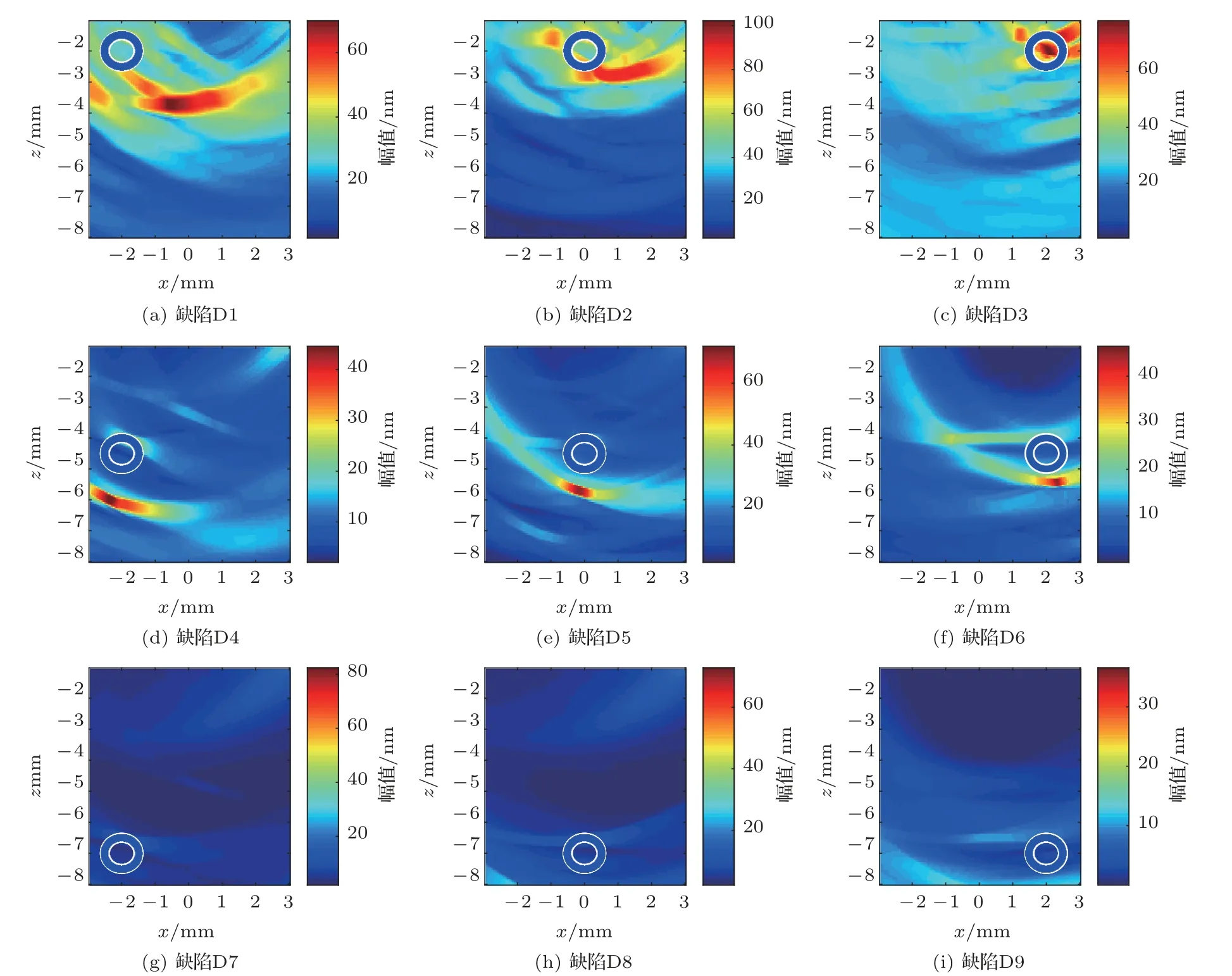
图12 缺陷D1~D9 SL 波重建图Fig.12 SAFT images of defect D1-D9 using SL wave
据图9~12 可知,不同模式波对不同位置分布缺陷有不同的成像效果。其中SS 波对缺陷D1~D9具有很好的成像效果,且伪像影响较小,这是因为与其他模式波相比,SS 波幅值最大,且灵敏度范围最广;LL 波可对缺陷D1、D2、D4、D5、D7、D8 成像,但由于其幅值较低、信噪比差,图像中伪像幅值更高,严重影响了图像的信噪比;LS 波可对缺陷D5、D6、D8、D9 成像,但质量差,图像中存在幅值更强的伪像;SL 波可对缺陷D4~D9 成像,但也有伪像干扰。此外,在缺陷D4~D6的SS波图像中,缺陷上下表面都有图像,其中缺陷上表面幅值较强的图像是由缺陷反射波引起的,而缺陷下表面幅值较弱的图像则是由缺陷衍射爬波形成的,根据缺陷上下表面图像的距离,就能够确定圆孔缺陷的位置和尺寸。
对缺陷D4 使用LL 波成像时,图像中会出现缺陷的伪像(见图13(b)中的黑色虚线框),这是由于在对缺陷D4 使用LL 波进行图像重建时,伪像位置的叠加信号S(Mi,t)(t= 1,2,3,··· ,N)会取到缺陷反射SL 波的一部分,若将B 扫图中的SL 波去除(如图13(c)所示)再成像可得结果如图13(d)所示,由此可证实缺陷D4 的LL 波SAFT 中的伪像是由SL波引起的,缺陷D4 的LL 波图像中无SS波伪像是由于成像区域的限制(伪像位于成像区域外,在成像区域内不显示)。同理,缺陷D4 的SL 波图像中的伪像是由SS 波引起的,对于缺陷D5、D6 的LL和SL波图像中的伪像,理由同上。
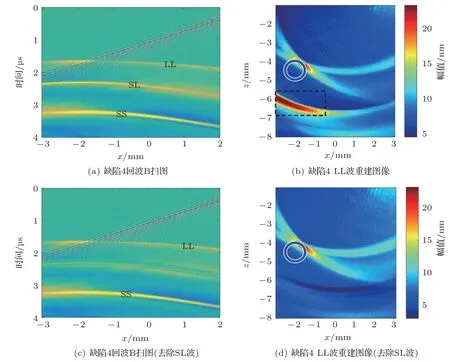
图13 缺陷D4 LL 波图像伪像分析Fig.13 Analysis of fake image in SAFT images of defect D4 using LL wave
综上,选择SS波对缺陷D4~D9成像,而对于缺陷D1~D3,4 种模式波的图像信噪比都不高,但由于LL波传播时间最短且具有一定的幅值强度,在B扫图中能与其他模式波区分开,可只截取B 扫图中含LL 波的部分用于成像,因此,选用LL 波对缺陷D1~D3 成像。使用该模态组合的多模组合成像结果如图14所示。
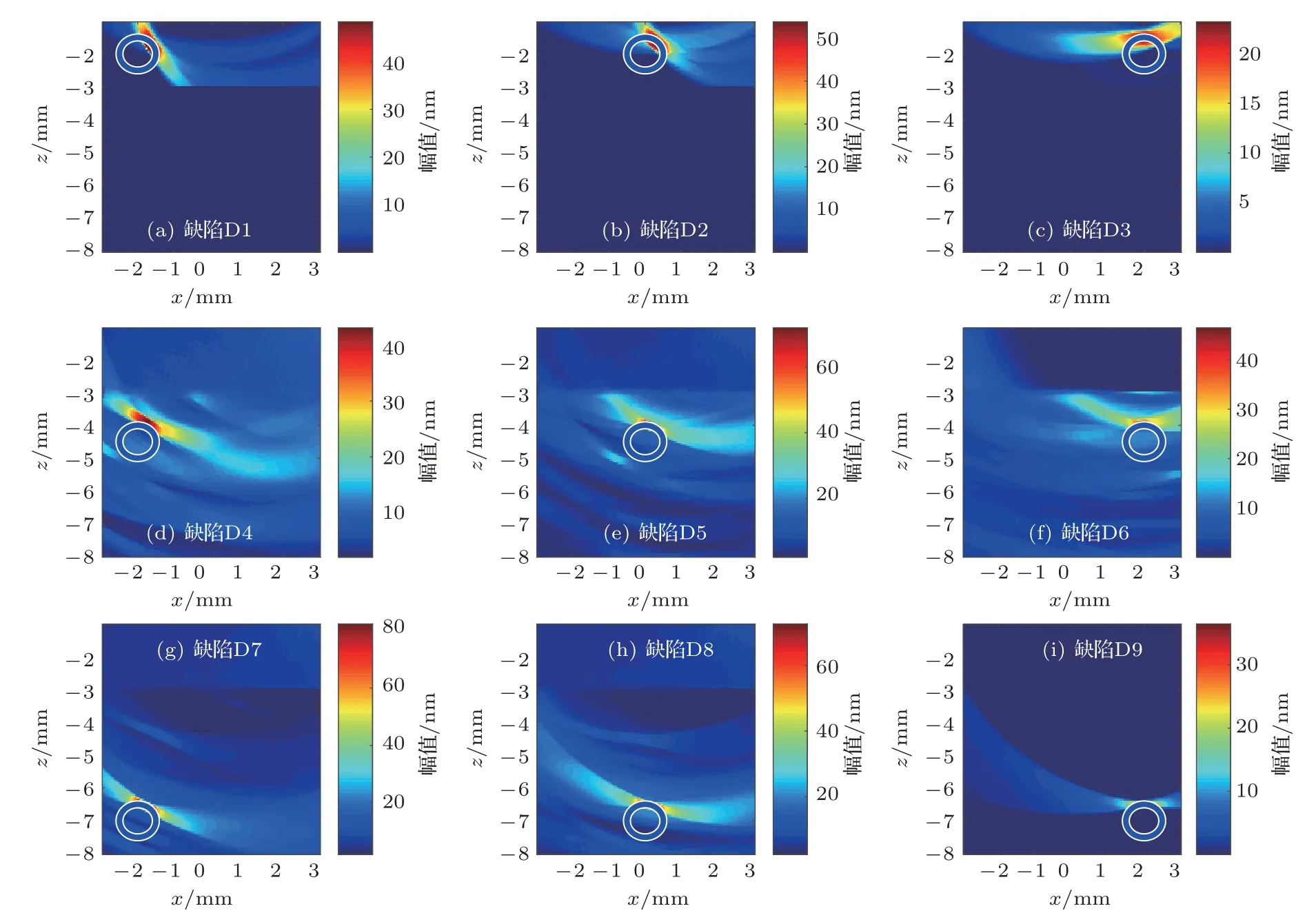
图14 9 个缺陷的多模组合SAFTFig.14 Multi-mode combination SAFT images of nine defects
由图14可知,该模式组合的多模组合SAFT方法能够实现对不同位置缺陷的高质量成像,该方法能减少缺陷图像的伪像、消除盲区,并提升缺陷的成像质量。
为验证该多模组合成像方法的有效性,还对缺陷D1、D7、D9 同时存在的情形进行了仿真,仿真结果如图15 所示,所得回波B 扫图和多模组合SAFT图像如图16 所示。由图15 可见超声波与缺陷的相互作用,图15(a)为激光激发纵波与缺陷D1 的相互作用,图15(b)为激光激发横波与缺陷D7、D9 的相互作用。由图16(a)可知B 扫图无法区分缺陷反射波也无法直观地显示缺陷位置,图中标出的超声波是由图16(b)反推得到的。经过多模SAFT 组合成像处理后的图像如图16(b)所示,由此可得,多模组合成像方法可实现多缺陷的检测,图像中缺陷D9的幅值较弱,这是因为缺陷D9 位于灵敏度较弱的区域。
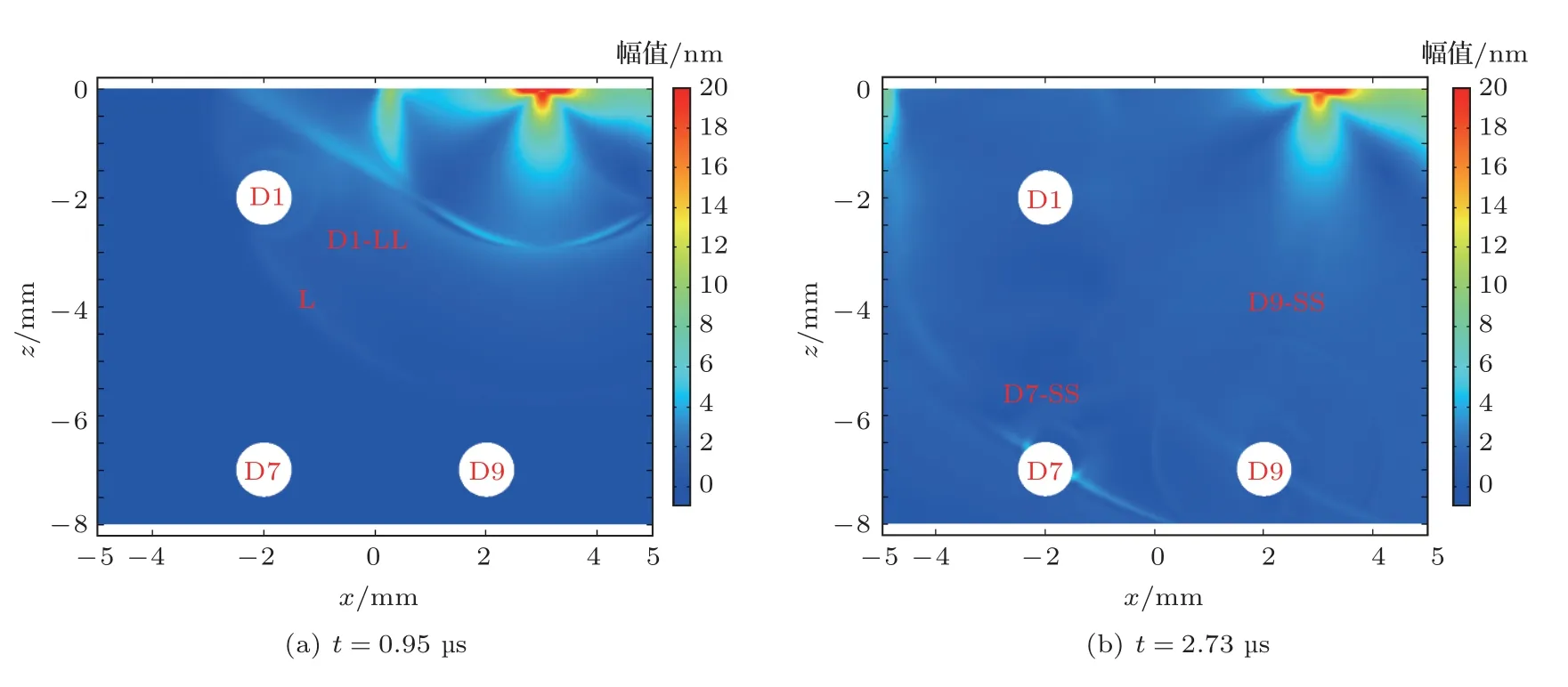
图15 仿真结果Fig.15 Simulation results
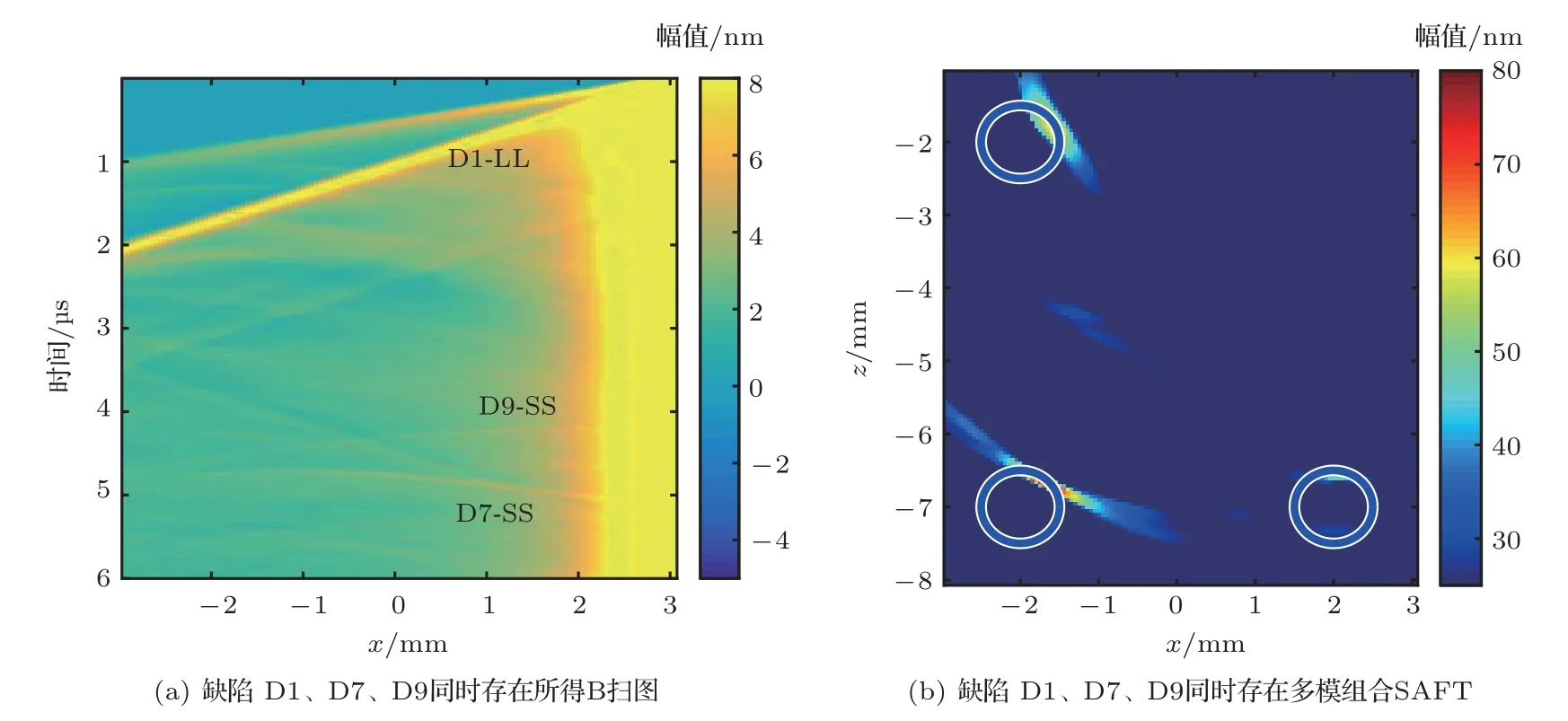
图16 B 扫图和多模组合SAFT 图像Fig.16 B-scan image and multi-mode combination SAFT image
4 结论
本文提出了一种基于激光超声的多模式SAFT方法来解决激光超声体波检测内部缺陷时反射信号弱且信噪比较差的问题,并利用数值计算方法进行了成像验证。根据选定的扫查方式,耦合激光激发超声方向性、干涉仪探测超声方向性、缺陷反射声场分布方向性得到声场灵敏度图,并综合考虑声场灵敏度分布和超声波传播特性(速度、幅值等),选取纵波反射纵波(LL波)对近表面缺陷(缺陷D1~D3)成像,选择横波反射横波(SS 波)对近表层以下缺陷(缺陷D4~D9)成像。与传统单模式成像相比,多模组合成像方法可实现伪像消除、盲区减小和成像质量的提升。此外,还对缺陷D1、D7、D9同时存在的情况进行了仿真并成像,成像效果与理论预测基本一致。但仿真成像未考虑实际使用时噪声等其他因素的影响,后续将进行多模组合成像方法的实验验证,且目前的多模组合成像方法的区域划分还较为粗糙,还需进一步优化以提升该成像方法的适用范围。
