啮合阻尼对人字齿行星齿轮传动系统均载特性影响分析
2022-09-15张旭东张磊杨林杰曹延军吴鲁纪王威陈洪基黄杰生王金龙
张旭东,张磊,杨林杰,曹延军,吴鲁纪,王威,陈洪基,黄杰生,王金龙
(1.郑州机械研究所有限公司,河南郑州 450052,2.西安工程大学机电工程学院, 陕西西安 710045,3.中广核工程有限公司,广东深圳 518124)
0 前言
齿轮系统是应用广泛的动力传动装置,其振动和噪声问题也尤为突出,吸引了国内外大量学者对其非线性动力学特性进行研究。
在现有研究文献中,王靖岳等建立了包含齿侧间隙的齿轮传动系统动力学非线性模型,分析了系统随外载荷和齿侧间隙变化的分叉图,以不同的定性与定量对系统进行了详细的研究。向玲等人以风电齿轮为研究对象,以集中参数模型建立了纯扭转系统的非线性动力学模型。赵昕等人研究了风力发电高速级齿轮系统的非线性动力学响应,采用集中参数法建立了十六自由度齿轮、转子、轴承非线性动力学模型;该模型融合了变啮合刚度、齿轮偏心和传递误差等非线性因素;结果表明:齿侧间隙和偏心量均对系统的扭转振动有明显影响,在设计系统时,应尽量避免偏心现象的出现。吴瑞芳等利用粒子群优化算法对系统非线性PID控制系统进行改进,结果表明:优化后的非线性系统能够在线调整参数,提高了系统传动的精度。
上述研究表明:对于齿轮传动动载系统的研究,多数为单对齿轮副的研究;而人字齿行星齿轮模型的啮合阻尼参数研究,由于其模型构件较多,动力学特性也更加复杂,因此,对其研究较少。本文作者基于集中参数法建立了人字齿行星齿轮传动系统纯扭转非线性动力学模型,研究了啮合阻尼对系统动态特性的影响。
1 非线性动力学建模
人字齿行星齿轮传动系统由太阳轮、行星轮、内齿圈和行星架等构件组成,系统工作时,内齿圈固定,功率由太阳轮输入,由行星架输出。采用集中参数法建立人字齿行星齿轮传动系统纯扭转非线性动力学模型,如图1所示。
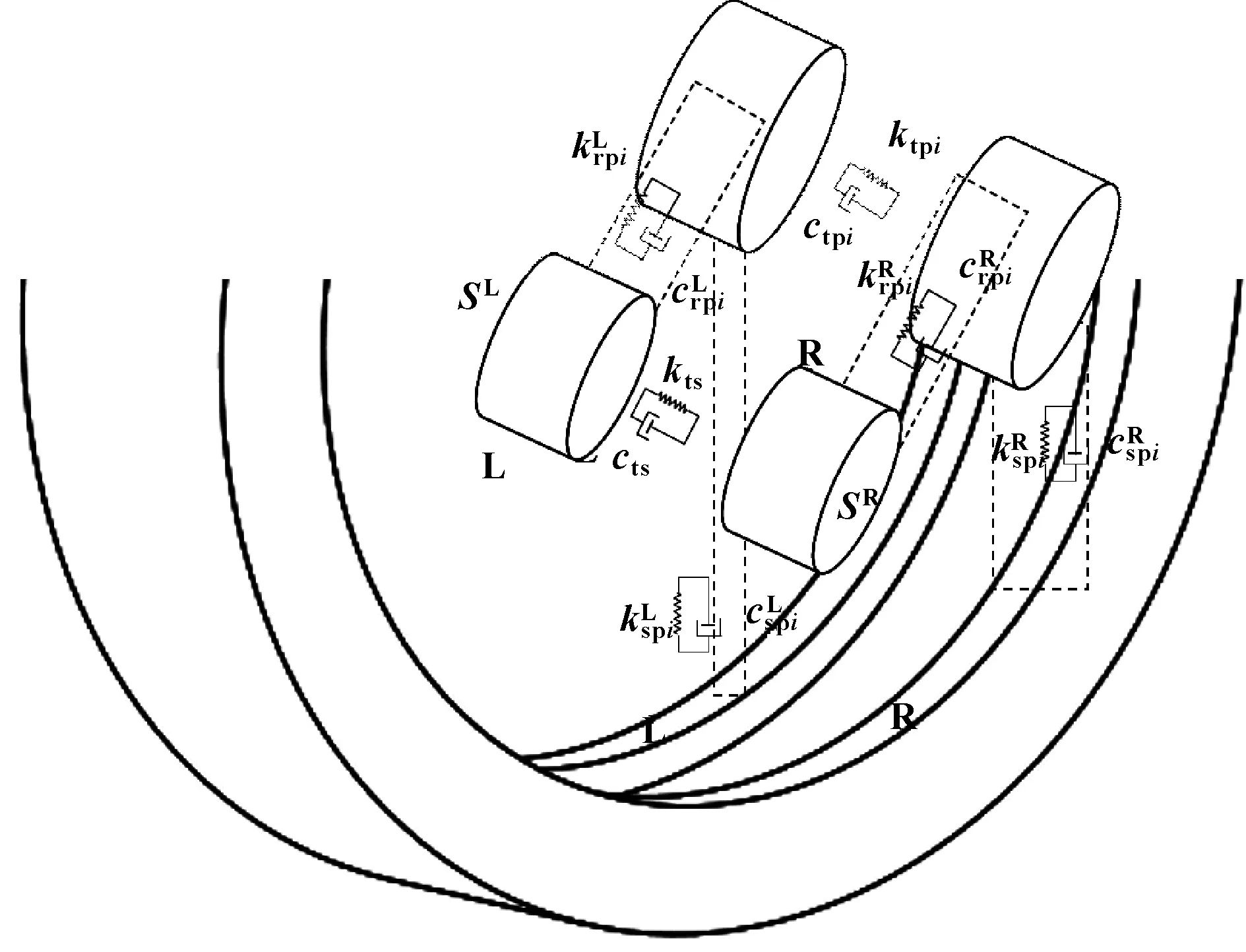
图1 动力学模型人字齿轮传动系统
啮合扭转动力学模型由太阳轮、行星轮和行星架构成。整个系统坐标系为--,假定逆时针旋转为正,不考虑传动轴扭转和弯曲变形、支撑系统弹性变形等因素,仅考虑各构件扭转方向的振动。根据系统中各构件受力关系,可得太阳轮、行星架和行星轮的振动微分方程组,分别为




(1)


coscos=-
(2)






(3)
式中:为输入转矩;为负载转矩;L代表左侧啮合齿对;R代表右侧啮合齿对;(=s,p,c)表示各齿轮转动惯量;为各齿轮基圆半径;为各构件扭转振动角位移;为齿轮基圆螺旋角;为行星轮压力角;sp/rp、sp/rp分别为内外啮合刚度和内外啮合阻尼;、tp为扭转刚度;、tp为扭转阻尼。
根据系统中各构件之间的位置关系,分别得出太阳轮与行星轮啮合法线上的相对位移,内齿圈与行星轮啮合法线上的相对位移,其中sp为太阳轮与行星轮啮合法线上的相对位移,为


(4)
rp为内齿圈与行星轮啮合法线上的相对位移,为


(5)
2 非线性系统振动特性求解与分析
人字齿行星齿轮传动系统的内外啮合副在啮合时产生啮合阻尼效应,目前啮合阻尼常采用经验公式近似表达。根据系统中啮合阻尼和阻尼比、啮合刚度和构件质量的关系,常采用下式计算阻尼
(6)
利用4-5阶变步长Runge-Kutta法对非线性系统的振动方程进行解析。计算前略去1 000个周期来消除系统的瞬态响应。以相轨迹图、时间历程图、傅里叶变换功率频谱图和庞加莱截面图作为分析手段,研究此系统随啮合阻尼变化的分岔和混沌特性。齿轮啮合阻尼的大小和阻尼系数相关,因此可以通过调整阻尼系数优化啮合阻尼。齿轮系统的参数如表1所示。分别取啮合阻尼0.01、0.02、0.04和0.05,获得系统的非线性响应形态如图2—图9所示。

表1 系统参数
当=0.01时,可得系统的稳态响应为图2和图3所示结果。
由图2—图3可见:在=0.01时,该系统出现了混沌响应,相线杂乱无章且充满空间的某一部分;庞加莱截面为多个离散点;响应的时间历程图为非周期,且不稳定,在太阳轮和行星轮的响应中表现尤其明显;FFT频谱为具有一定宽度且逐渐衰减的连续波形。
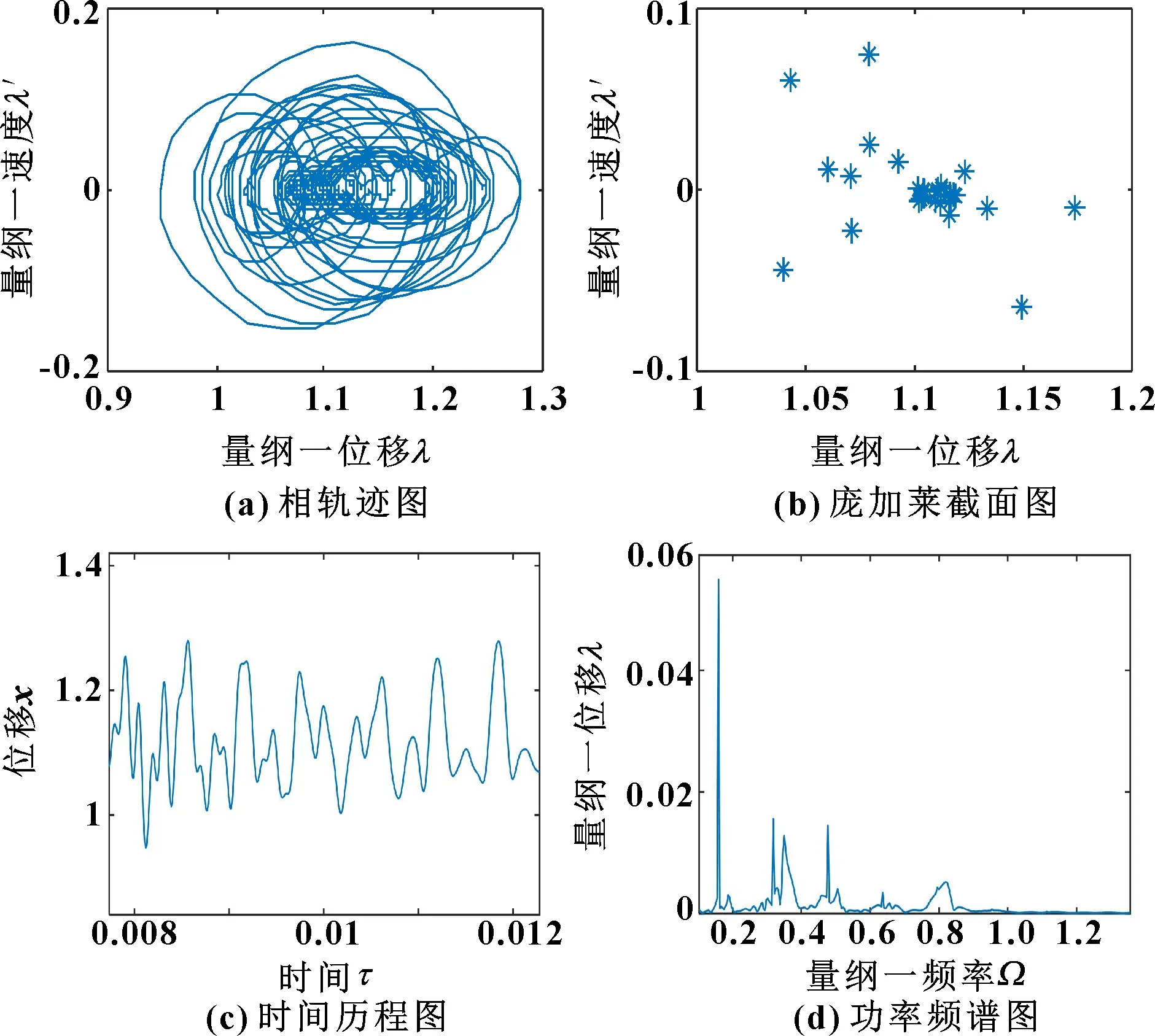
图2 太阳轮和行星轮啮合之间的混沌响应(ζ=0.01)
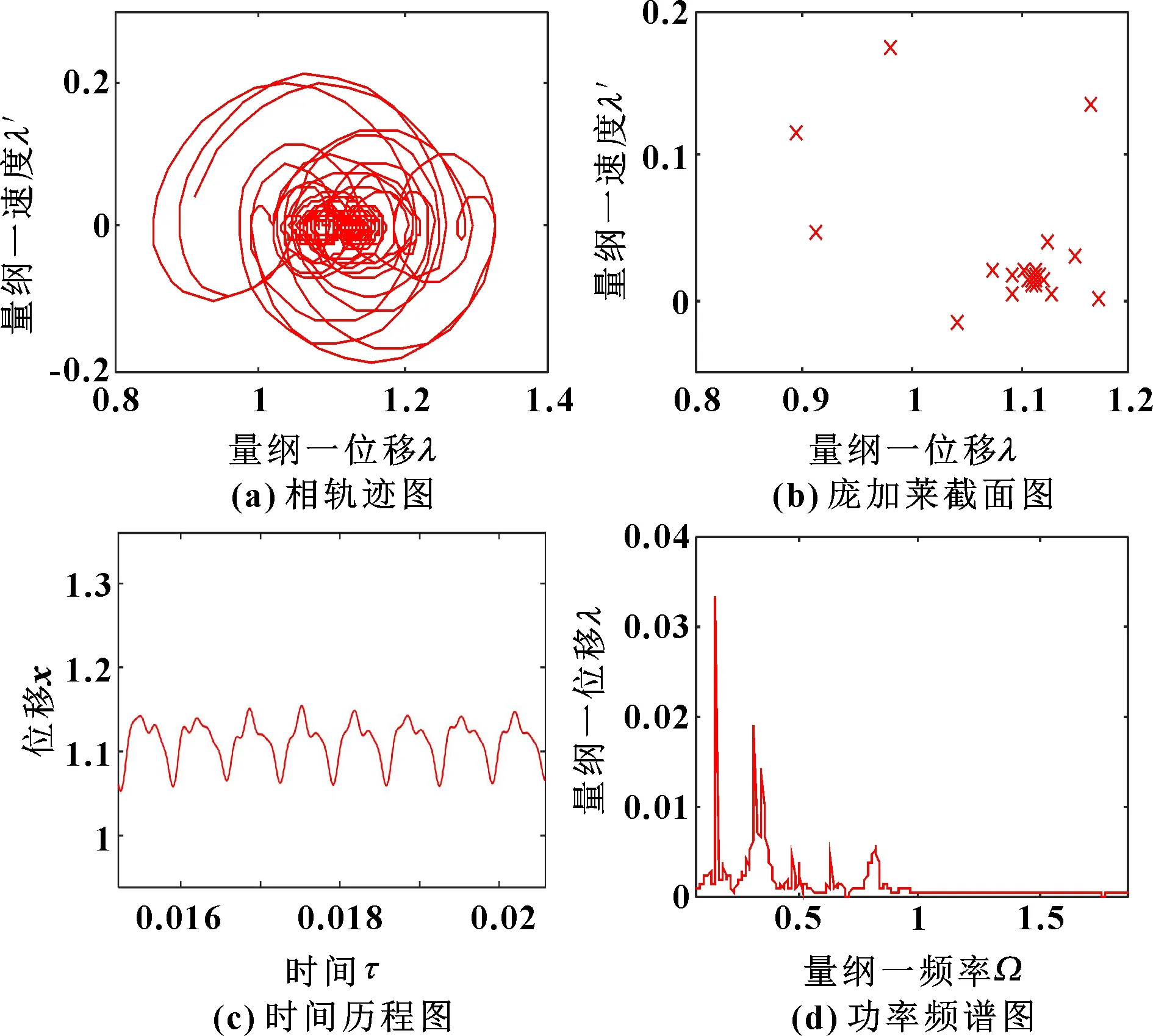
图3 内齿圈和行星轮间的混沌响应(ζ=0.01)
由图4—图5可见:在=0.02时,系统的响应为非谐单周期响应,相轨迹图具有一定规律性,为非圆闭合“8”字曲线;庞加莱截面为多个离散点;响应的时间历程图近似正弦波,且不稳定,在太阳轮和行星轮的响应中表现得尤其明显;FFT频谱出现多个尖峰值,频率分布在(为正整数)的离散点上,其频率表现不稳定,表明系统含有超谐成分。
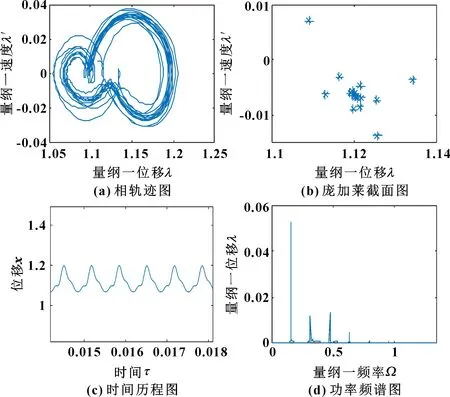
图4 太阳轮和行星轮啮合之间的非谐单周期响应(ζ=0.02)
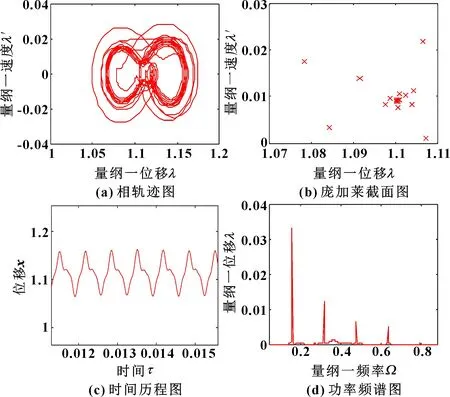
图5 内齿圈和行星轮间的非谐单周期响应(ζ=0.02)
由图6—图7可见:在=0.04时,系统的响应为准周期响应,相轨迹图为具有一定宽度的环线;庞加莱截面为多个离散点,离散点数目大大减少;响应的时间历程图近似正弦的周期运动;FFT频谱仍有多个尖峰值,频率分布在(为正整数)的离散点上。
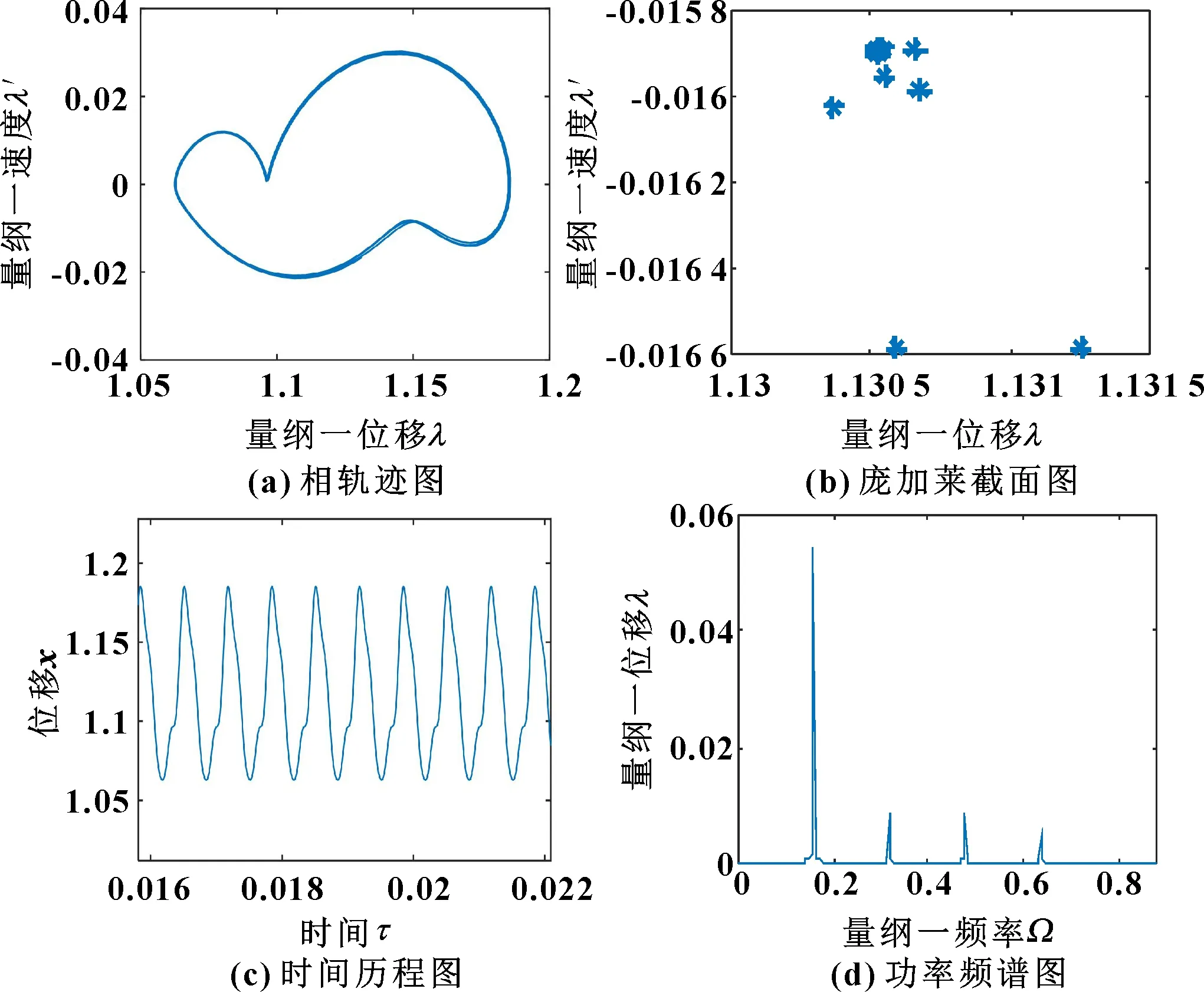
图6 太阳轮和行星轮间的准周期响应(ζ=0.04)
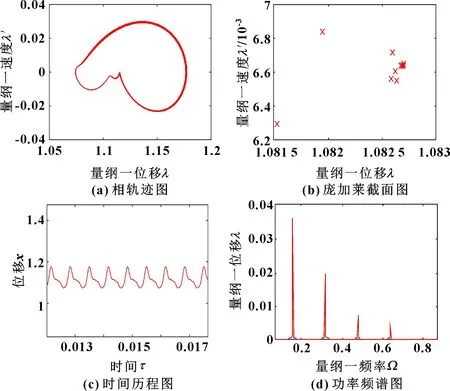
图7 内齿圈和行星轮间的准周期响应(ζ=0.04)
由图8—图9可见:在=0.05时,系统的响应为简谐周期响应,相轨迹图为非标准圆;庞加莱截面为单个点;太阳轮和行星轮的响应的时间历程图为标准正弦波,而内齿圈和行星轮为近似正弦波;太阳轮和行星轮的FFT频谱只有一个固定频率,而内齿圈和行星轮的FFT频谱图出现多个尖峰值,但主要集中于两个频率。
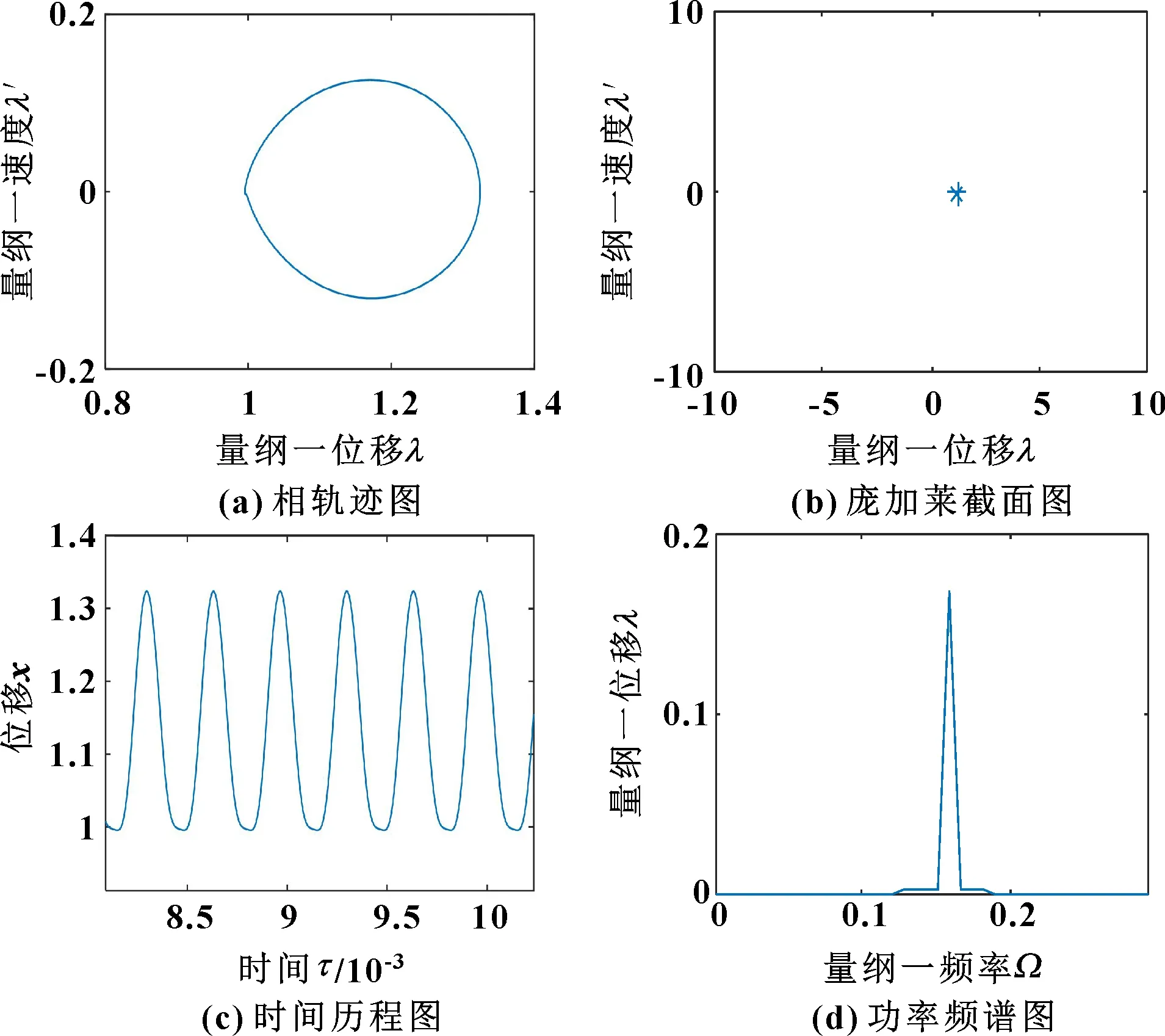
图8 太阳轮和行星轮间的周期响应(ζ=0.05)
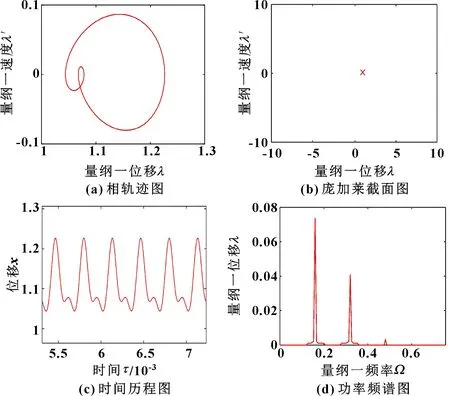
图9 内齿圈和行星轮间的周期响应(ζ=0.05)
3 结论
建立了人字齿行星齿轮传动系统非线性动力学模型,获得了系统的稳态响应,分析了啮合阻尼对系统非线性动力特性的影响。在人字齿行星型齿轮传动系统中,啮合阻尼的存在使系统具有很强的非线性,在啮合阻尼变化下系统表现出四类稳态响应,分别为混沌响应、非谐单周期、准周期和周期响应。随着阻尼增大,系统稳定性增强,由混沌状态逐渐转化为周期响应。因此,在设计行星齿轮传动系统时,应适当增大阻尼系数,提高整个系统的稳定性。
