基于LabVIEW的伸缩臂越野叉车参数监控系统设计
2022-09-14肖超海程志群张军何承元洪启升叶敏
肖超海,程志群,张军,何承元,洪启升,叶敏
(1.安徽好运机械有限公司技术中心 安徽 合肥 230601;2.西安卓士博液压工程有限责任公司技术中心,陕西 西安 710119;3.长安大学工程机械虚拟仿真实验教学中心,陕西 西安 710064)
叉车是用于堆垛、装卸货物使用频率最高、需求数量最多的工程机械车辆,在短途货物运输中得到广泛应用。越野叉车是兼具高空作业和叉车功能的伸缩臂越野叉车,具有全轮驱动、爬坡能力强的特点,在建筑工地、山林果园、油田开发、管道铺设以及在工厂仓库、港口码头货物提升或搬运等作业环境恶劣的地方应用广泛,具有良好的市场前景。目前我国在越野叉车的研究和应用上还处于起步阶段,市场份额被国外品牌占据。因此,迫切需要开展伸缩臂式越野叉车的基础研究,特别是掌握越野叉车的作业工况和性能,对提升产品品质有重要意义。
现有的研究集中在越野叉车的液压系统和电控系统2方面,重点关注越野性能。越野叉车驱动系统采用变量泵和变量马达的双变量方案,有效分配泵马达排量是难点。为解决行驶系统中无级变速和负载自适应的功能要求,王勇等[1-2]从电控角度对泵和马达的功率匹配、发动机的极限功率保护功能进行了分析,但未对两者如何适应变复杂工况做深入探讨。针对相同问题,姚凯等[3]从液压系统着手,采用力士乐的DA泵来满足负载自适应要求,借助液压系统的压力反馈进行变速,可实现行驶系统的无极变速,但牺牲了快速响应性。王勇等[4]对行走液压系统工作参数进行了设计计算,康刘阳[5]采用仿真方法对越野叉车的复合传动系统进行了分析,为行走系统中的泵和马达的参数选择提供了依据。此外,针对伸缩臂式越野叉车工作臂,罗艳蕾等[6]采用Matlab分析了举升装置的工作参数,为研究伸缩臂式越野叉车提供参考。关于越野叉车行驶系统的负载自适应以及伸缩臂式越野叉车的工作性能,还是缺乏深入研究。
为解决伸缩臂越野叉车在开发中遇到的技术难题和提升车辆的作业性能,本文以自行研制的4 t伸缩臂越野叉车为对象,采用全电比例控制方式设计了叉车的行驶和工作装置的控制系统;并依据课题组前期在工程机械装备控制系统和参数监控系统的技术积累[7-13],设计了越野叉车的参数监控系统,为优化越野叉车控制系统性能提供可视化评价方法。
1 监控系统功能分析
1.1 越野叉车工作原理
4 t伸缩臂越野叉车可实现45°爬坡,可配置3节和4节伸缩臂,主要区别是伸缩臂结构不同,前伸距离和最大起升高度不同,如4节伸缩臂最大起升高度可达18 m。4 t伸缩臂越野叉车的结构如图1所示,可分成伸缩臂工作装置和底盘行驶系统两大部分。工作装置包括变幅、伸缩、货叉调平和货叉移动等4部分,与高空作业车一样需要进行力矩安全限制。相比起重机联合伸缩臂配的位移和举升缸油压的联合判断法,4 t叉车是通过测量后桥受力变化来判断车辆安全状态。底盘包括驾驶室、支腿、发动机、行驶系统、液压主阀和配重等。其中,变量泵和变量马达组成的行驶系统是越野叉车的关键点,有效分配泵马达排量,关系到车辆的越野性能。

图1 4 t越野叉车结构组成Fig.1 Structure composition of 4 t telehandler
1.2 控制系统组成
越野叉车的控制系统由伸缩臂工作装置、行驶系统、发动机和仪表4部分构成,通过CAN总线交互数据,如图2所示。

图2 越野叉车控制系统Fig.2 Schematic of telehandler control system
工作装置是通过电液操作手柄操控,在力矩传感器的保护下让工作臂在安全范围内作业,其力矩限制原理是确保重心落在4个车轮内。行驶系统的输入主要是油门和刹车踏板,并且设有1挡低速(0~12 km/h)和2挡高速(0~37 km/h),以满足作业和转场要求。工作装置、行驶系统与发动机均通过CAN总线进行数据交互,从而通过CAN总线可有效了解越野叉车作业状态和工况。
1.3 监控方案
在新产品开发中,须进行产品的性能测试,完善所必需的设计和调试。尽管伸缩臂越野叉车有显示系统,但其主要目的是标定和显示力矩传感器,以及显示整机的基本工作参数,难以为整机的故障诊断、系统优化等提供完整参数。
鉴于工作装置和行驶系统均采用PEAK CAN模块进行程序下载,若能将下载工具与参数监控结合,将该系统调试和优化更为方便。为此,采用LabVIEW作为开发平台,个人计算机(PC)通过CAN卡与车辆CAN网络通信,系统方案如图3所示。其中通信线缆符合CAN通信标准,开发的监控系统在PC端运行,通过对特定报文数据的解析,实现越野叉车整车工作参数的状态监控和性能分析,为系统的优化设计提供依据。

图3 监控系统方案Fig.3 Monitoring system composition
2 监控系统软件设计
2.1 软件架构
为满足越野叉车的状态参数监控和功能扩展要求,本次设计延续了前期柔性化测控系统的理念[9],借助队列、全局变量和多线程的技术,实现报文数据的采集、解析和曲线显示,以及数据存储和参数报警等功能。队列是确保数据采集与数据解析、曲线显示处理分开,以保证系统运行的实时性,避免出现数据拥堵;全局变量可以将解析的数据在曲线显示、数据存储和参数报警模块中进行共享;运用多线程可满足多个任务分时运行,确保系统的灵活性。
为说明队列和多线程在系统设计中的作用,图4给出了系统中原始报文到终端的数据流。当PEAK CAN收到报文后,队列模块会将所有报文压入队列,然后在报文解析模块中对缓冲数据进行解析并释放缓冲区。数据解析是按照已经定义好的参数来逐个对报文进行比对和解析,然后将参数定义中的参数内容按照顺序存入AI_Data数组。而后续的参数显示、曲线显示和数据存储则按照通知形式来实现数据的定时更新。图4中各个模块均在不同的循环内,即各自线程中运行,通过全局变量进行数据共享,如Stop来实现停止,AI_Data来实现参数交互。
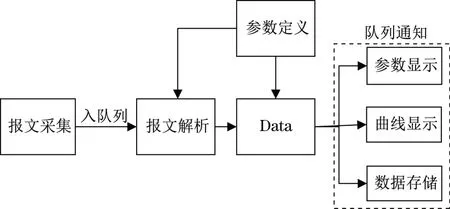
图4 数据传递流程Fig.4 Data transferring process
2.2 队列模块设计
监控系统中采用了队列的异步处理和消息通信2大功能,异步处理是将报文采集与报文解析分开,实现异步处理;消息通信用于参数显示、曲线显示、数据存储和报警等功能模块,实现定时更新。队列主要包括队列初始化、出入队列和注销队列等3大模块,队列初始化是为各个队列变量定义其匹配的数据类型和队列形式;入队和出队,则分别是向队列(或队列通知)变量写入数据以及读队列(或队列通知)中变量的数据;而注销队列是在系统结束时将初始化队列中所有变量注销。
以队列初始化为例,如图5所示,前3个模块是Obtain Queque函数,用于报文解析、曲线显示和保存模块的队列。报文采集的队列名为CAN Frame que,其变量格式与CAN报文一致,但由于需要存储多个报文,因此这是一个结构体数组变量。后面的Notifier变量是通知信息,通过Obtain Notifier进行消息通知,实现曲线数据更新等定时操作功能。
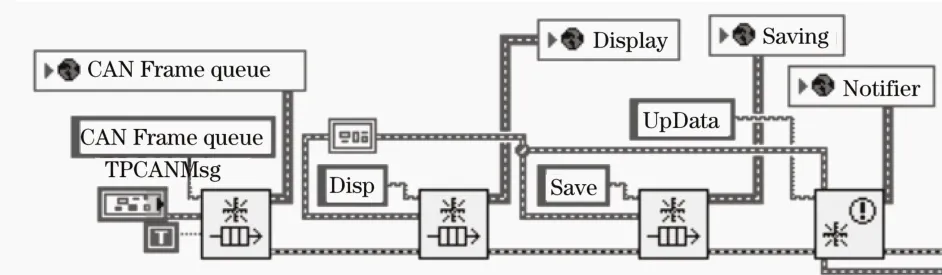
图5 队列初始化后面板Fig.5 Queue initialization function
2.3 报文解析
报文解析是按照物理参数所在报文的位置逐步解析,接收的报文CAN_MSG变量包括ID和帧数据Data_array,如图6所示。如果解析的参数已定义,则根据其数据起始位Start_bit、数据位长度number_of_bit、数 据 类 型data_type、数 据 模 式Byte_order(大端或者小端模式)、数据比例系数a和b,解析参数后获得参数数据值value。以泵比例阀电流为例,该参数位于16#101报文的第1和2字节,为此判断接收的CAN_MSG报文是否存在101报文;若有,则取出该报文中的第1和2字节,计B1和B2,按照小端模式方式进行数据拼接,获得比例阀电流为B1+B2×256。按照这个规则将所有物理参数进行解析。

图6 报文解析流程Fig.6 CAN frame parsing flow chart
参数显示则是通过队列通知来实现,如图7所示,参数显示分配到一个while循环中,并通过全局变量stop来控制参数显示模块的启停。如果接收到通知,则更新通知里的数据变量AI_Data,相关的参数定义则根据参数序号进行一一解析。如发动机的故障码SPN和FMI分别位于参数定义的78和79号,则直接通过索引即可获得它们的参数。
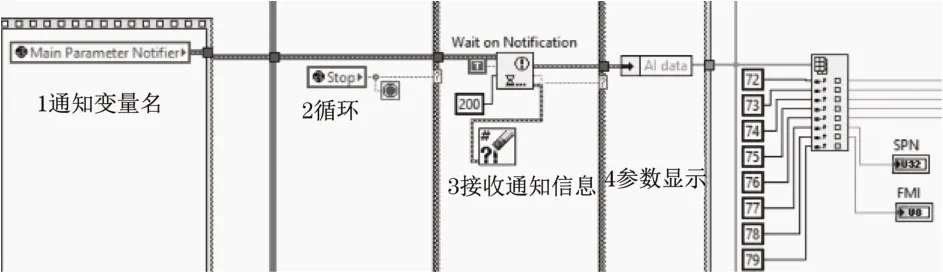
图7 参数解析Fig.7 Parameters parsing from queue
3 监控系统功能试验
将设计的监控系统部署在个人计算机上,通过USB PEAK CAN卡与4 t伸缩臂越野叉车连接,分别在正常和故障越野叉车上进行功能试验,从而确定故障源。
3.1 参数监控功能试验
越野叉车涉及行驶系统、工作装置和发动机等3大装置,仅发动机的J1939协议就包含很多报文,因此总线上的数据量比较大。按照车辆运行参数监控和故障诊断的思路,系统选择了17个报文,共110个参数,部分参数定义见表1,所有解析的报文均为标准帧,数据模式是小端模式。

表1 部分报文参数定义表Tab.1 CAN frame parameters define table
通过CAN总线与叉车连接后,启动越野叉车,发动机扩展帧报文与行驶控制器和工作控制器的标准帧报文合并后,报文总数量超过50个ID,数据量大。
设置行驶挡位为1,方向为前进,进行测试,测试结果如图8所示。从图中可知:目前支腿已经收起,符合行驶条件;系统检测到了前进和1挡的行驶条件,但车速仍为0,其原因是当前发动机转速仅为999 r/min,处于低带速状态,行驶系统不能工作。从以上信息可知,设计的监控系统能正确的解析报文,实现了越野叉车的参数监控功能。
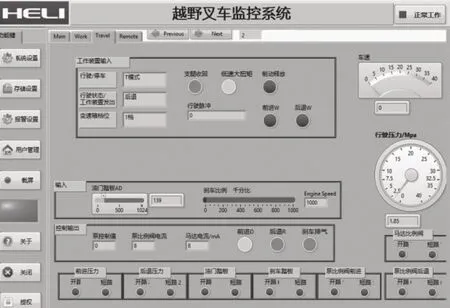
图8 参数监控结果Fig.8 Monitor result of telehandler
3.2 故障诊断功能
参数监控系统的一个主要功能是故障排查。某样机车速不平稳,无法实现高速行驶,且阻力较大,行驶有顿挫感。为此,分别对比了正常机型故障机型的行驶系统压力曲线。
叉车的原地转向阻力较大,采用该工况进行对比试验。图9为性能良好的叉车在原地转向时进行后退和前进的压力曲线,行驶系统压力在8~10 MPa,变化平稳。图10为故障车行驶系统的压力曲线,系统压力波动大,并存在溢流状态,表明泵和马达是正常工作,但存在大的行驶阻力,初步怀疑是行走系统被锁住,导致车速无法提升,压力波动。
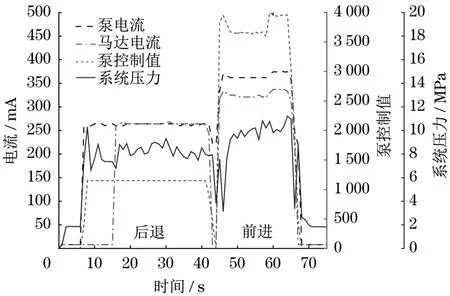
图9 正常设备原地转向的测试结果Fig.9 Travel pressure for normal telehandler insitu steering

图10 故障车行驶压力变化曲线Fig.10 Travel pressure for faulty telehandler insitu steering
经过对液压系统和机械结构的辅助判断,怀疑是刹车油路存在空气,导致液压系统油温高后因气体膨胀而触发制动,导致行驶时阻力太大,出现系统溢流和较大的压力波动。为此,去掉制动系统的油路并进行行驶测量,故障车的车速正常,表明制动阻力已经释放,说明参数监控系统为叉车的故障诊断提供了科学依据。
4 结语
针对伸缩臂越野叉车的运行状态、故障诊断等功能要求,采用LabVIEW为软件平台,PEAK USB/CAN为硬件平台,通过队列、全局变量和多线程等技术完成了越野叉车的参数监控系统的开发,通过实验测试,系统功能良好。将设计的系统用于故障车辆监控,快速发现了越野叉车的故障源,为叉车工作过程中的故障诊断提供了可视化的判断方法。采用CAN总线监控方式有效实现了车辆状态监控和故障诊断,但仍依赖于个人电脑,后期可以考虑物联网技术,通过蓝牙/WIFI来获得车辆信息,为改进越野叉车性能奠定基础。
