回撤吊车拖吊机构运动学性能分析
2022-09-14苏芳李渊赵海燕赵聪
苏芳,李渊,赵海燕,赵聪
(1.山西大同大学机电工程学院,山西大同037003;2.山西大同大学建筑与测绘工程学院,山西 大同 037003)
能源是社会发展的动力,尽管人类一直在竭尽全力寻找并利用清洁能源,但面对庞大的能源需求,当前传统的矿物能源仍是人类消耗能源的主体,对保障社会生产生活具有重要意义。煤炭是一种重要的传统能源,其开采依赖于大量的人力和机械装备。随着科技的进步,先进的大型矿井已经发展成为智能化的高效安全型生产基地,融合了采矿、机械、电气、材料、计算机和控制等多学科科技成果。在煤炭开采生产过程中,不可避免地要面临搬家倒面的任务,对于井下的大型开采设备,搬迁是一个较复杂的工作,需要制定合理的搬迁工艺,利用足够动力的大型搬迁设备来完成[1]。回撤吊车是一种井下专用的大型拖吊平台,可高效地完成井下液压支架等大型设备的拖吊和搬迁[2-3]。
回撤吊车是一种全液压大型平台设备,具有安全、高效的优点。如图1所示,回撤吊车由机身和工作拖吊机构组成。该设备可进入井下巷道,执行工作面重型设备的搬迁任务。拖吊机构是回撤吊车的关键执行部件,其工作性能的优劣直接影响到回撤吊车工作的安全性和有效性。运动学特性是拖吊机构的重要性能指标,是实现其功能的基础保证,因此,有必要对其工作域内的运动学性能分布特征进行分析,为回撤吊车的应用及后期优化提供参考。
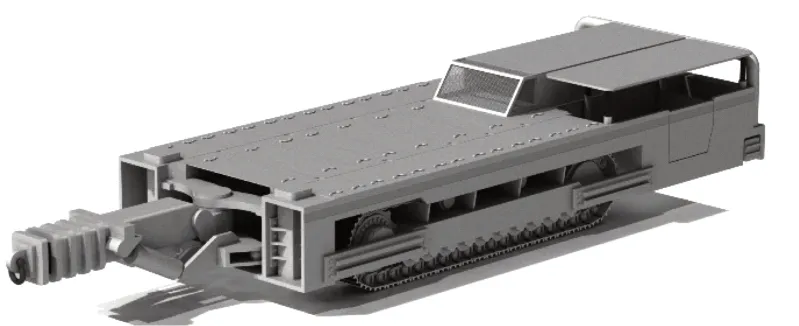
图1 回撤吊车模型Fig.1 The 3D model of Shield Mule
拖吊机构的运动学分析是机构学的传统课题,特别是在机器人领域,运动学分析是机构的基础研究内容[4-6]。运动学主要涉及的问题有自由度、正逆解和工作域,运动学性能评价指标有压力角、条件数[7-8]。祖琪等[9]提出一种复杂多环耦合新型正铲液压挖掘机构,基于运动链环路理论和模块化图形组态对机构进行运动学建模,并基于Matlab平台对机构运动学进行仿真分析。Brinker等[10]根据压力角的概念,提出了一种物理意义上的测量方法,将传输特性和约束特性聚合为一个单一指标,用于并联机器人运动学性能评价。孙颜明等[11]设计了一种盾构机用6自由度液压换刀机械臂,并通过运动学分析验证了设计结果的有效性。张春燕等[12]提出一种集4足步行、蠕动和“全姿态”滚动等运动模式为一体的4-URPU多模式移动并联机构,并基于运动学分析进行了优化。综上所述,运动学分析可以为机构性能评估、优化及应用提供参考。
回撤吊车的拖吊机构由5个液压缸和结构件混联组成,如图2所示。以该机构为研究对象,基于运动学分析,考查机构的自由度、工作域及运动学性能。
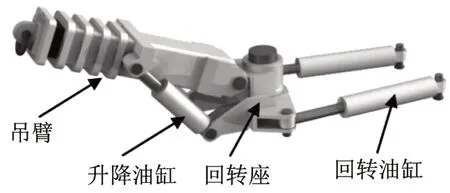
图2 拖吊机构模型Fig.23D model of the towing mechanism
1 机构描述与坐标系建立
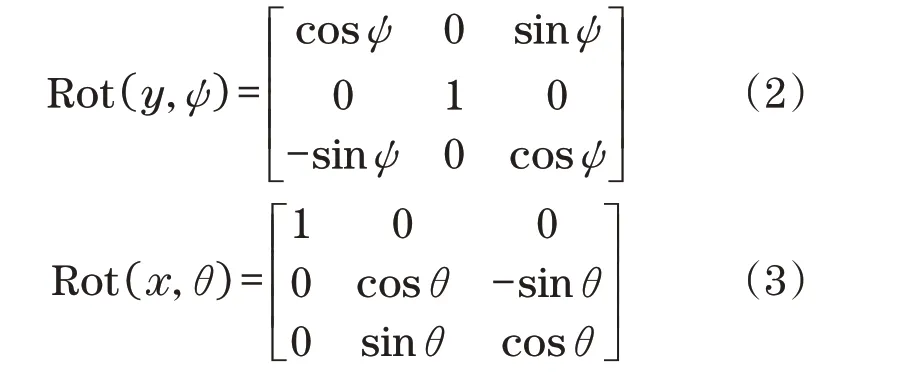
由图2可知,拖吊机构有2对并联的液压缸,分别实现2个方向的旋转控制,与结构件和吊臂串联组成吊臂。其中,回转油缸的固定铰链用D1和D2表示,活动铰链用A1和A2表示,并用B1、B2和C1、C2分别表示升降油缸两端的铰链位置。如图3所示,拖吊机构以吊装机构回转中心O点作为静参考系坐标原点,选取D1、D2和O组成的平面作为静参考系的xOz面,垂直方向为y方向,建立静止参考系O-xyz。以吊臂端点P作为动参考系原点,吊臂方向为u方向,w方向与z方向平行,v方向垂直于u、w,建立动参考系P-uvw。动系P-uvw的姿态矩阵可通过先绕z轴旋转θ,再绕y旋转描述ψ,即
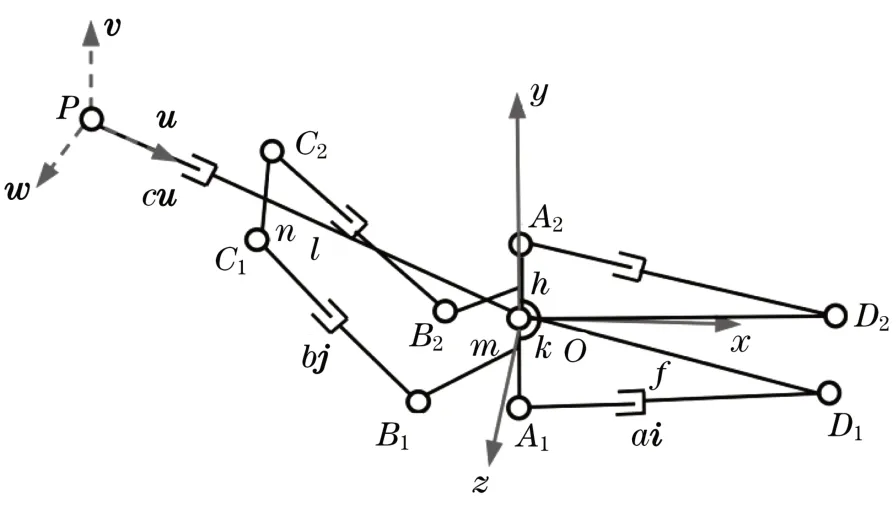
图3 拖吊机构参考系Fig.3 Coordination frame system of the towing mechanism of shield mule
其中,
令
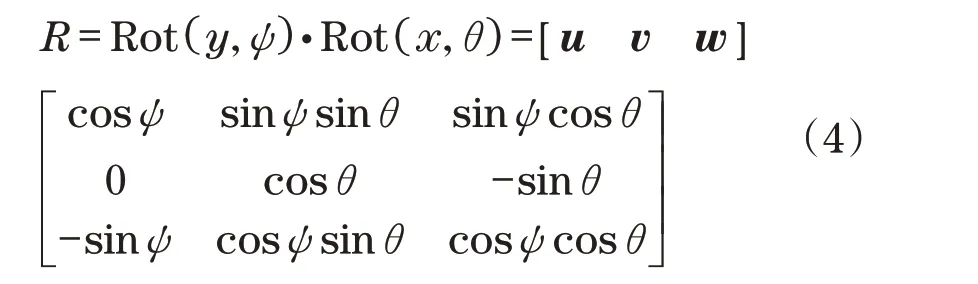
式中:u=v×w,v、w分别为动系P-uvw3个单位矢量。
2 自由度分析
基于螺旋理论,对拖吊机构进行约束和自由度分析。机构共有6个运动副:
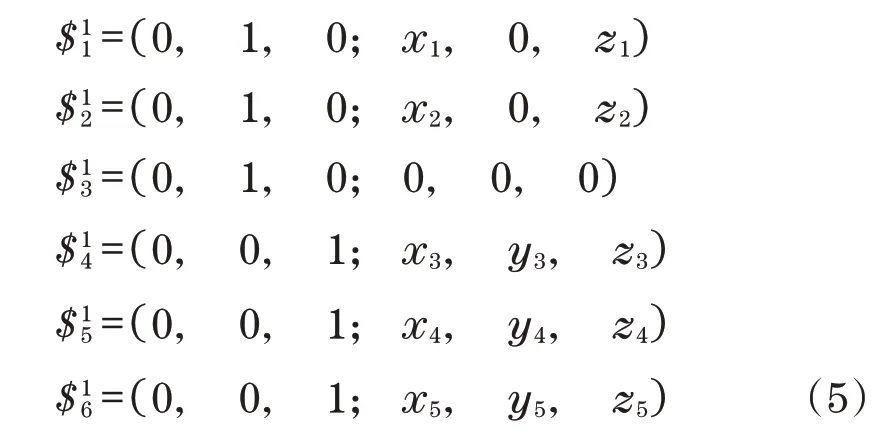
去掉线性相关量,求反螺旋得

求反螺旋得
故有3个自由度。
3 运动学正逆解分析
3.1 位置逆解
P点在静系坐标下的位矢为

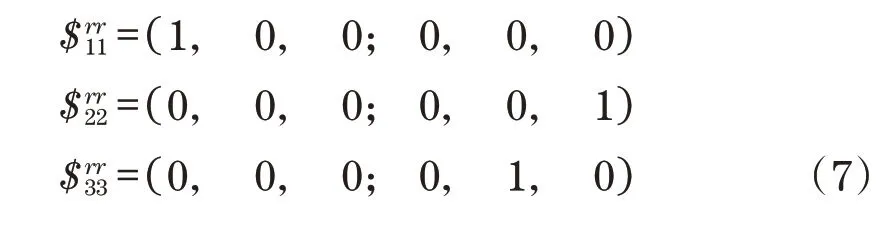
式中:k、m、n分别为升降液压缸两端支架在静系下的位矢;b、j分别为升降液压缸的杆长和单位矢量;c、u分别为吊臂液压缸的杆长和单位矢量。A1、A2、B1、B2、C1、C2、D1、D2在静系下的位矢表示如下:

故可解出转角ψ和θ为

3.2 位置正解
P(x,y,z)为P点在静系下坐标,初始值为

经位姿变换,先绕静系z轴旋转θ,再绕静系y旋转描述ψ,然后沿动系u伸长e,得

式中:θ=[0°;60°];ψ=[-45°;45°];e=[0;1200]。
由机构位置正解可得拖吊机构的工作域,如图4所示,为对称环面。
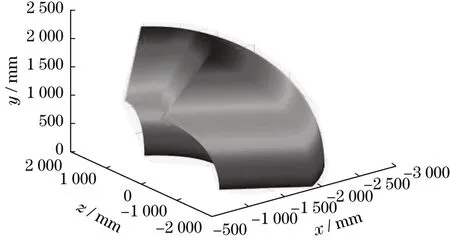
图4 拖吊机构工作域Fig.4 The workspace of the towing mechanism of Shield Mule
4 运动学性能评价
拖吊机构主要功能是完成井下大型设备的移动,关键特性是力的传递,因此以压力角表征运动学特性。回转运动主要依靠回转油缸驱动来实现,回转油缸与回转座的压力角是拖吊机构摆动性能的重要指标,以αy表示,如图5所示。
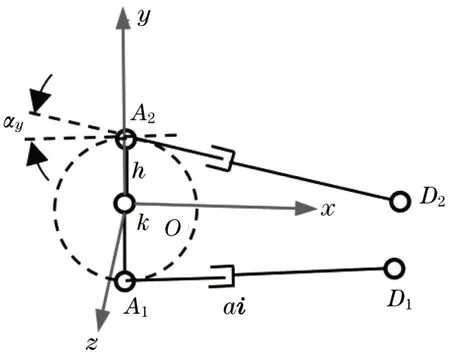
图5 摆动压力角Fig.5 The shaking pressure anger
在工作域内,随着拖吊机构绕y旋转ψ左右摆动油缸压力角变化情况如图6所示,其中,αy(L)表示左摆动油缸,αy(R)表示右摆动油缸。
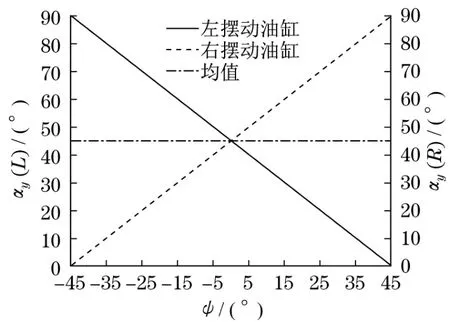
图6 摆动油缸压力角分布Fig.6 The distribution of the shaking pressure anger
由图6可知,在工作域(-45°;45°)内,随着拖吊机构绕y轴转角的变化,左摆动油缸压力角减小,右摆动油缸压力角增大。在工作域(-45°;0°)内,左摆动油缸压力角较大,在工作域(0°;45°)内,右摆动油缸压力角较大。左右摆动油缸平均压力角在全工作域内始终保持在45°,以此来保证全工作域内对摆动力的需求。
升降运动依靠升降油缸驱动实现,升降油缸与吊臂的压力角是该吊装机构升降性能的重要指标,以αz表示,如图7所示。αz随与拖吊机构其他自由度无关,至于绕z轴的转角θ相关,在θ域内变化情况如图8所示。

图7 升降压力角Fig.7 The lifting pressure anger
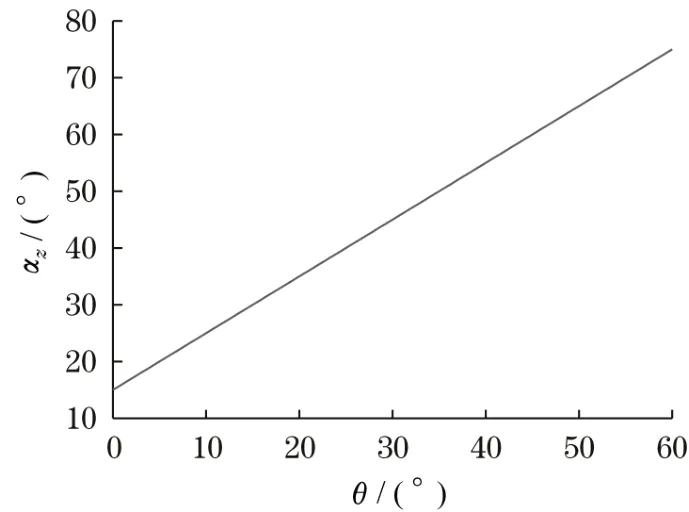
图8 升降油缸压力角分布Fig.8 The distribution of the lifting pressure anger
由图8可见,随着拖吊机构绕z轴转角的增大,压力角增大,吊装力增强。
综上所述,在工作域内,拖吊机构的摆动性能具有一致性,能够保证全工作域内摆动压力角有效值45°,使机构具有良好的摆动力学性能。同时,吊装性能随着θ角的增大而增大,机构具有良好的力学传递性能,升降压力角最大值可达75°。
5 结语
基于螺旋理论、机构正逆解模型及压力角完成了回撤吊车的执行机构运动学分析,得到了机构自由度、工作域及工作域内的性能分布。结果显示,该机构在全工作域内,运动传递性能非一致性较高,在应用中应充分考虑机构的运动学特性、力学传递特性。
