识图技术在“1+X”工业机器人操作与运维中的应用
2022-09-14杨俊伟
鲍 敏,王 莹,杨俊伟
(黑龙江职业学院,黑龙江 哈尔滨 150000)
1 工业机器人系统构成
1.1 工业机器人结构
工业机器人每一个关节都由一台伺服电机驱动,因此,如果将机器人分解,发现六轴工业机器人是由若干台伺服电经减速后驱动运行部件的机械运动机构的叠加和组合。
1.2 工业机器人驱动装置
工业机器人如果只有六轴机构是不可以正常运转的,就好比人只有骨骼是不能完成运动的,需要有“肌肉”的帮助,工业机器人的肌肉组织就是驱动系统,通过转动或移动连杆来改变机器人的形态。“工业机器人减速器+伺服电机+伺服控制系统”共同努力不仅为工业机器人提供了足够的力量在连杆带动负载的情况下进行加速或减速,还为工业机器人提供精准的控制能力。工业机器人减速机从结构上分类主要有谐波减速器、RV 减速器;工业机器人结构中的伺服电机按照电源类型的不同可分为直流伺服电机、交流伺服电机;按照系统中是否存在反馈可分为开环控制、半闭环控制以和闭环控制。
1.3 工业机器人末端执行器
末端执行器可以理解为根据不同作业需要而在工业机器人末端安装的响应装置。比如上料过程中,工业机器人需要抓取工件,需要给工业机器人安装抓手装置,并控制手爪的开闭,完成抓取任务。从类型上可以分为手爪类和工具类。其中手爪类包括夹持类手爪,吸附式手爪包括气吸式和磁吸式。
1.4 工业机器人控制系统
工业机器人的控制系统是机器人的关键部件,它可以按照操作者的命令,对其进行操纵,以满足其工作要求。控制系统的好坏直接影响到整个机器人的工作效率。好的控制器通常应具有灵活、方便的操作方式,并具有各种运动控制的形式和安全、可靠的操作方式。该系统包括:计算机的硬件系统和运行控制软件、输入输出设备、驱动系统、传感器系统等。
1.5 工业机器人操作与运维职业技能等级标准对识图技能的要求
通过分析对工业机器人的组成内容,可以看出工业机器人组成包含器械、机电、电气、控制等部分,并以人作为信号传递起始点,通过各控制部分最终完成对工业机器人本体的控制。工业机器人操作与运维职业技能等级标准对初级等级的要求为学生能够正确的识读装配图,按照图纸选用正确的零部件并且能够确定安装位置;能够正确识读电气图,按照图纸选用正确的电气元件并且能够确定安装位置;能够正确识读气动以及液压原理图,按照图纸正确选用并且能够确定安装位置以及管路的连接。工业机器人操作与运维职业技能等级标准对中级的要求为,学生能依照机械图纸以及工艺卡片,正确安装工业机器人应用系统;能正确安装系统液压、气动控制回路;能依照电气图,正确完成连接[1]。
2 机械装配图识图
2.1 零件图和装配图
机械和零部件都是按照特定的组装方式和技术需求组装而成的。根据图纸的种类包括零件图、组装图等。
零件图是表示单个零件的形状、尺寸和特征的图样,同时也是生产和检查机械零件的图样,也称为零件工作图[2]。在生产实践中,要按照产品图纸和技术要求进行生产准备,完成加工制造和进行检测。所以,这是一个重要的技术文档,可用于指导零部件的制造。
装配图是表达机器或部件的工作原理、运动方式、零件间的连接及其装配关系的图样,同样也是生产中的重要技术文件。在生产过程中,首先要进行设计,绘制装配图,再由装配图拆分出零件图,按零件图加工零件,最后根据机械装配图将零件装配成组件。同时,在对检修工作中,装配图也是必不可少的技术资料。
2.2 机械图读识
机械图中的基本要素包括标题栏、字体、比例、尺寸标注、图线等。在工业机器人操作与运维识图中要重点关注标题栏、比例、图线、尺寸标注。以《齿轮油泵》装配图为例,在标题栏中需要确定名称、编号、比例、制图及审核人员等信息。通过标题栏内基本信息快速查找图纸、确认图纸信息,见图1。通过图线、标注、技术要求、元件表等信息,分别呈现出组件的形状轮廓、尺寸编号、技术要求及各元件之间的相互装配关系。
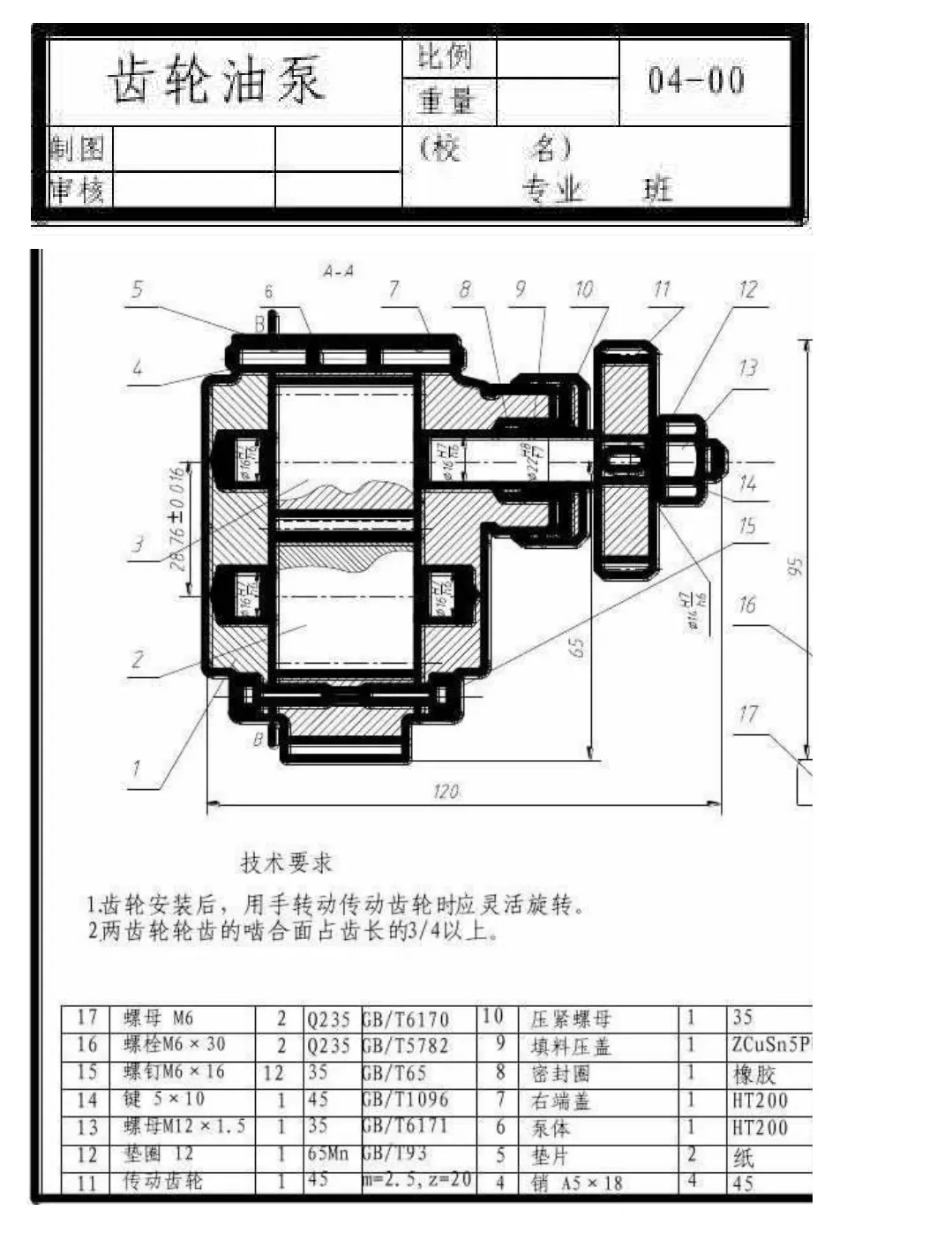
图1 装配图例
2.3 工业机器人装配与工艺卡识读
工艺卡作为装配工艺的标准化文件在日常生产中极为重要,工业机器人的装配过程也是通过工艺卡方式体现。工艺卡不仅包含图纸中图形内容还包含装配说明,更关键的是将各工作环节串联起来,从而起到指导及规范操作的作用,见图2。工序明确了装配整体流程编号,按照这种顺序编号能够进行工序核对、开展下一步准备工作或者进行拆除回退:工序名称指当断工序的内容,可以是装配的工作类型、工序关键词、工序分类名称等;工序内容:对当前工艺的具体描述部分,其中涉及关键的操作环节,关键参数和关键位置会重点强调,并通过关联后续的图纸、图片等进行参考;参考图纸:在整体装配过程的零件、装配关系、装配后的图纸信息进行关联,用于进行参考;参考图片:针对装配过程中的关键点、关键信息、关键位置等信息以图片形式进行展现和比对,从而提升装配的准确性;施工工具:涉及专用工具部分进行提示和说明。要注意工序中的工具一般会在准备工作中进行全量体现,避免因个别环节工具准备不足影响装配流程效率。工艺流程等信息依据不同类型的工艺卡片有不同设置,对流水线等存在时间配合要求的可以明确装配参考时间;对需要可追溯的情况下该部分可以使装配人员确认标记、时间戳、姓名戳等。

图2 产品装配工艺过程卡片基本信息
2.4 机械装配识图考核要求
工业机器人操作与运维职业技能等级考核中,机械装配图识图主要包括工业机器人工作站机械布局图的识读、工业机器人安装工艺卡识读。在工业机器人操作运维职业节能等级考核中,对于末端执行器的安装需要识图工艺卡片,首先要确定机器人法兰盘手腕安装齿轮。准备安装末端执行器使用的工具、量具以及标准件,调整机器人末端法兰方向,用力矩扳手把机器人侧的工具快换装置安装到法兰盘上并进行固定,确定方向,把末端执行器与工具侧快换装置进行连接。
3 电气图识图
电气图是一种简单的图表,用以说明工作原理、电气的结构和作用及产品的安装和使用。电气布置图用图形符号、线框来描述,以及该系统中相关部件之间的联系。电气布置图是用来显示设备和控制柜中各个部件的安装位置,并为设备的制造、安装、维护、维修等提供必要的信息。电气图包括电气原理图、电气布置图、电气接线图等。
3.1 电气原理图
电气原理图是一种用来显示设备的电气原理和各个部件的功能,以及它们之间关系的表达方法。电气原理图是指电气电路的基本工作原理及逻辑关系(如配电、控制逻辑、电气系统结构等),利用电气原理图进行电气电路的分析,排除电路故障,编写程序。其格式包括系统原理框图、电气原理图、控制原理图等。
以工业机器人电动机驱动原理图为例,见图3,具体元件被方框替代,具体信号数据被箭头替代,各组成部分用虚线框进行框选并对具体的功能部分进行注释。整体简单明了,便于开展系统原理分析和信号流程分析。
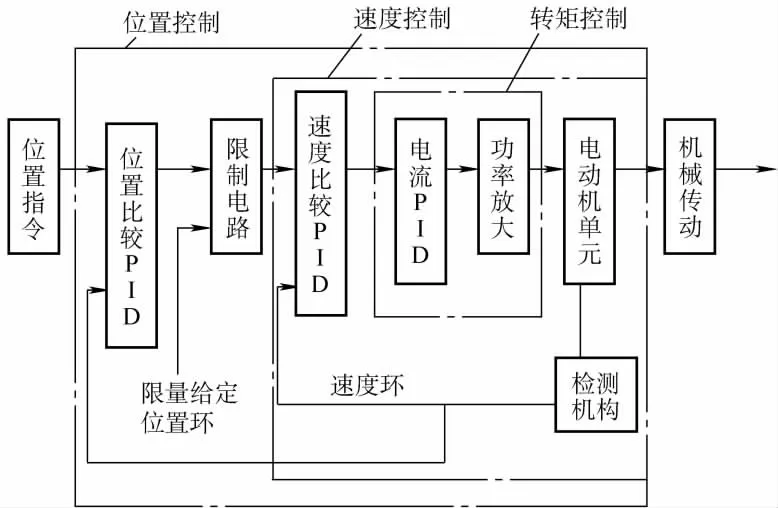
图3 电动机驱动原理图
见图4,直接起动控制电路,在起动时,首先关闭开关QF,接通电源;按下起动键SB2,KM 将线圈吸起,使其主触头KM 闭合,电机起动;由于KM 的自锁触点与SB2 上并联,在松开起动键时,其自锁触点保持接通;当停止时,按下停止键,接触器KM 的线圈失电,它的主触头就会被切断,电机停止转动。在工业机器人操作与运维职业技能等级标准中,对电路图的识读应遵循如下原则:第一,区分主、副、AC、DC,然后按照主、副的顺序读图;第二,读图顺序通常是从上往下,从左至右。在查看控制电路的时候,也要从上到下,首先是看电源,然后是其他的回路,分别是控制部分,保护部分,测量部分;指示部分、监视功能,掌握系统组成和工作原理[3]。
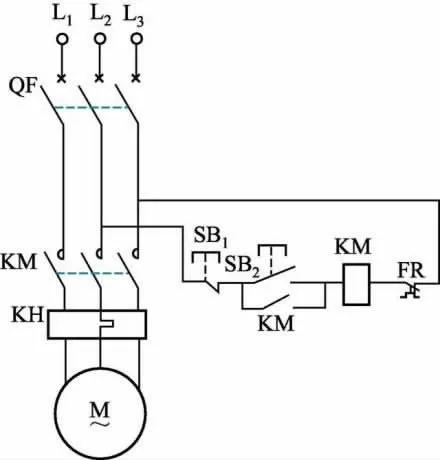
图4 电机启停原理图
3.2 电气布置图
电气布置图主要针对电气柜内的电气元件按照一定规则进行布置的图纸。根据用途不同可以分为面板布置图、柜内元件布置图。布置图主要包含电气元件编号及外形尺寸、元件排布位置、走线槽、元件标识等信息,用于指导安装人员进行标准化、规范化的安装操作。
3.3 电气接线图及安装工艺
电气接线图主要用于电气元件之间的接线连接工作。根据元件的布置位置、接线方式,选择合适的走线路由,接线工艺需要满足规范。接线图主要包括:电气相关设备和各元件相对的位置、端子号、文字符号、导线类型、导线号等。各元件相对的位置要与电气布置图一致,文字符号需与电气原理图是一致的,端子号需与元件的接线端子是一致的,导线号按照不同需求设置不同分区的编号并在接线两端保持一致,导线类型同导线截面共同确定了具体所使用的导线规格等。在工业机器人工作站中,工业机器人不仅能动起来,还要精准控制,工业机器人各系统通过接线联合发挥作用才能保障整体工作状态。因此,接线工艺非常重要,需要专用工具和接线辅助材料进行成端,有指定的专用连接线缆、接头处理方式、接线方式。在工业机器人工作站电气控制系统接线时,值得注意的是,同一元件的各个不同的部件是按照不同的功能分布在不同回路中的,识图过程中,需要特别注意元件的各个不同的部件动作时相互的联系。
3.4 电气图的工艺卡片
同机械安装工艺卡片作用一样,电气图的工艺卡片为电气设备安装、接线、测试、操作进行规范化展示和指导。
3.5 电气图考核要求
在工业机器人操作与运维职业技能等级考核中,主要聚焦典型的工业机器人工作站,因此在电路图学习中具有一定的相似性。机器人工作站的电气系统基本原理、组成部分、安装工艺要求也基本相同,只是因设计不同选型不同品牌元件的差异性、接线方式差异、命名方式不同。但在实际等级考核中的考点也主要是原理、结构、工艺等。在实际操作过程中,要根据工业机器人工作站电气系统中的电气、控制原理有一定了解,对布线、接线工艺有一定掌握,能够根据电气工艺卡片等内容完成工业机器人电气、控制系统的安装,能够对接线工艺中的问题进行排查和纠正。
4 结论
工业机器人操作与运维技能等级考核中,分为理论和实操两个部分。理论部分要懂原理、懂结构、懂技术;实操部分要会看原理图、看结构图、掌握装配技术。这些都离不开最基本的机械图、电气图、气动图,更要会看操作指导书,熟悉工艺卡片对装配的指导作用,以最有效率、无差错的方式完成等级考核,并运用相关的知识提升自己的认识和操作技能,完成学习和岗位技能的对接,达到“1+X”的认证意义。
