基于传感器偏置故障的无人机容错控制设计
2022-09-14杜一鸣
周 丹,陈 诚,杜一鸣
(沈阳航空航天大学 航空宇航学院,辽宁 沈阳 110136)
在固定翼无人机飞行过程中,受飞行环境复杂性(如空中的不确定扰动)以及无人机零件老化等影响,无人机的传感器可能出现偏置故障,从而使无人机无法正常飞行[1]。为了保障无人机飞行过程中的安全性,容错控制[2]成为国内外学者重点研究的方向之一。
目前针对固定翼无人机传感器故障问题,国内外已有进展。孙延修等人[3]设计增广状态观测器,能够同时对无人机系统的状态和传感器的故障进行估计。Samir Z 等人[4]提出了一种鲁棒控制器,并在六自由度的无人机数学模型中采用,采用的容错控制可以在避免建模困难的同时保障了系统的稳定性和鲁棒性。Hu C 等人[5]针对传感器故障问题,提出了一种渐进模糊自适应的非线性容错控制方案。Guo Y 等人[6]基于自抗扰控制,设计一种容错控制器来恢复传感器故障并抑制因故障导致的扰动。曾勇[7]和黄喜元等人[8]针对传感器故障,采用模型参考自适应控制方案来稳定飞行器的控制。董文瀚等人[9]针对含有传感器故障的运输机姿态问题,基于神经网络原理,采用反步容错的方法设计扩张状态观测器来实现运输机姿态角的稳定跟踪。郭涛等人[10]根据自适应控制提出了一种容错控制方法,可以实时处理多种无人机故障。王蕊等人[11]针对无人机传感器故障问题,针对姿态和角速度分别建立了一种模糊自适应容错控制。王君等人[12]利用二阶卡尔曼滤波器来检测和估计传感器偏差,使用自适应容错控制来消除故障影响。
本研究针对固定翼无人机的传感器偏置故障问题设计了故障诊断器与故障估计器,故障诊断器能够同时检测加速度计偏置故障和陀螺仪偏置故障并识别出发生故障的通道,当检测到偏置故障后,通过反步控制理论与自适应控制理论设计故障估计器对未知的传感器偏置故障进行估计,补偿传感器偏置故障对无人机系统的影响。采用滑膜控制对含有传感器故障的无人机的姿态与速度进行控制,由于滑膜控制输入存在抖震问题,因此加入积分项以解决输入的抖震问题,使无人机的角度与速度接近目标值。
1 固定翼无人机与传感器偏置故障的数学模型

式中:s(*)、c(*)和t(*)分别表示为sin(*)、cos(*)和tan(*)。传感器本身有可能会受到偏置故障影响,设加速度计和陀螺仪的偏置故障模型为:

式中:ya和yw是加速度计值和陀螺仪值,ka和kw是发生偏置故障的时间,fa和fw是传感器的偏置故障,为了接近真实情况,本研究假设偏置故障是随时间变化的故障。
2 传感器偏置故障诊断与估计
通过式(1)-(4)和文献[13],将传感器故障模型带入到无人机数学模型中,简化后得到含有传感器故障的数学模型:
针对传感器偏置故障问题,采用图1 的体系结构解决。
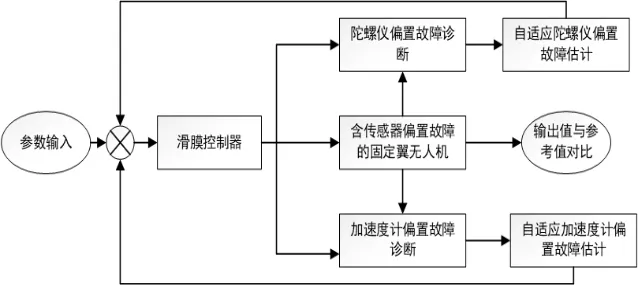
图1 传感器偏置故障诊断
从式(5)和图1 可以看出,陀螺仪测量的偏置故障只出现无人机姿态系统中,加速度计测量的偏置故障只出现在位置与速度系统中。因此,建立两个故障诊断估计器,来分别检测陀螺仪和加速度计中的偏置故障,当检测故障后,激活相应的自适应估计器来对传感器偏差故障进行估计。
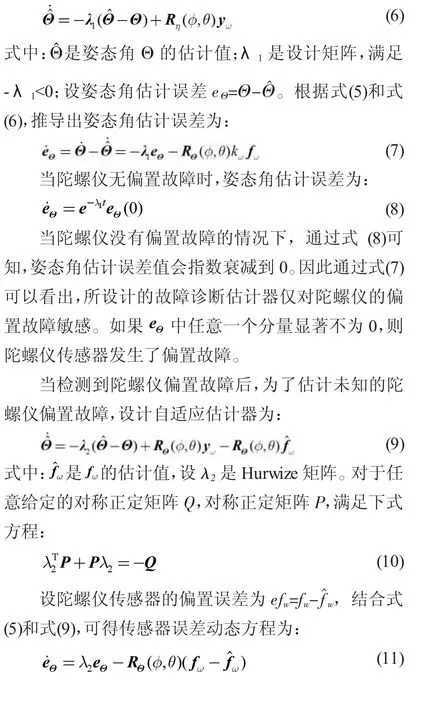
2.1 陀螺仪偏置故障诊断与估计
针对式(5)关于姿态系统的传感器偏置故障的数学模型,设陀螺仪偏置故障诊断估计器为:
2.2 加速度计偏置故障诊断与估计
将式(5)中的位置与速度系统转化为一般的状态空间形式:

3 控制器设计
3.1 姿态控制器设计

3.2 速度控制器设计
由速度坐标系到机体坐标系的转换关系可得机体坐标系速度VE与固定翼无人机的空速Va 之间的关系式为:


4 仿真
在MATLAB/Simulink 中搭建固定翼无人机的系统模型并对其进行仿真分析及验证。固定翼无人机模型基本参数见表1。
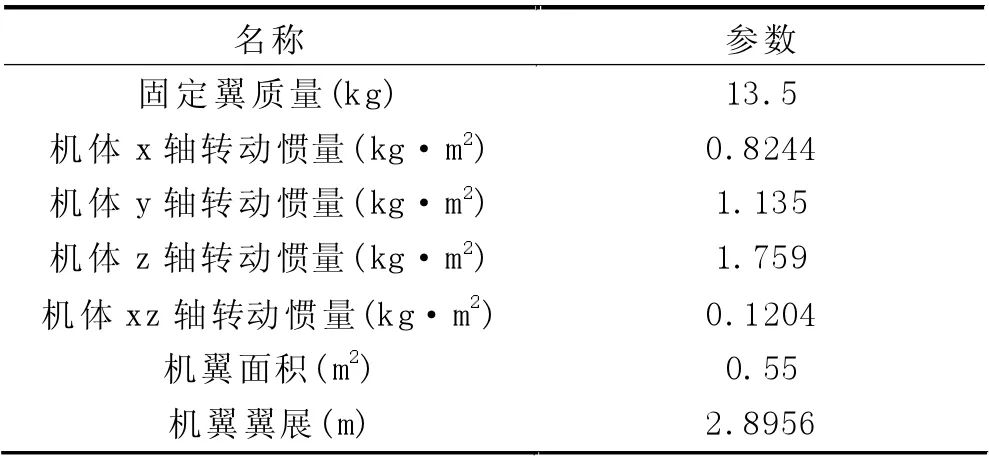
表1 无人机基本参数
图2、图3 和图4 分别是滚转角、俯仰角及偏航角的期望角度与当陀螺仪发生偏置故障后,经过自适应估计器产生的真实角度的对比图。
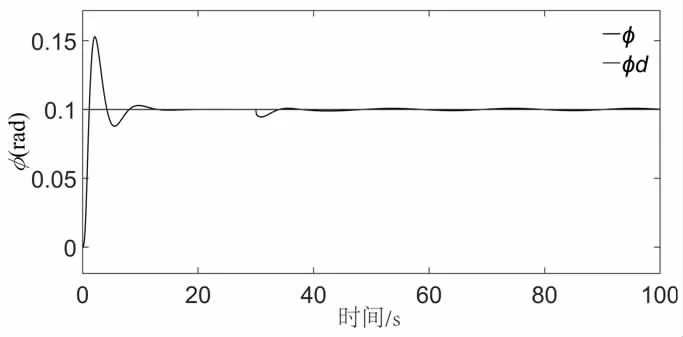
图2 φ 真实角度值与目标角度值
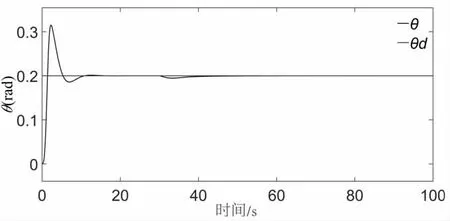
图3 θ 真实角度值与目标角度值
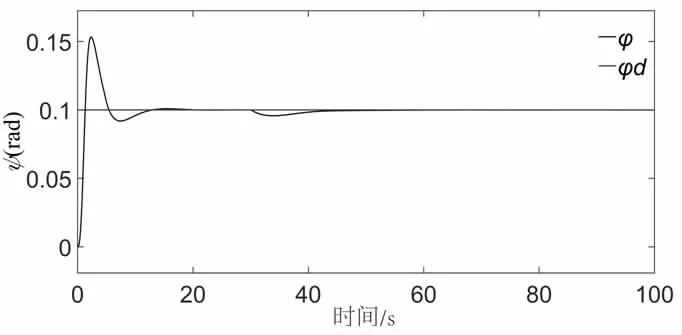
图4 φ 真实角度值与目标角度值
由于本研究假设滚转角的故障是随时间变化的正弦函数,当发生故障后,在13 s 后滚转角在0.099 2到1.000 8 之间震动,稳态误差在0.8%,可以忽略。因此得到结论:当传感器发生偏置故障后,通过所设计的自适应估计器,在经过13 s 左右的时间,真实角度会接近期望角度。
图5 是机体速度Vad与当加速度计发生偏置故障后,经过自适应估计器产生的真实速度对比图,从图中可发现,当加速度计发生偏置故障后,通过所设计的自适应估计器,经过17 s 左右的时间,速度会接近期望速度。
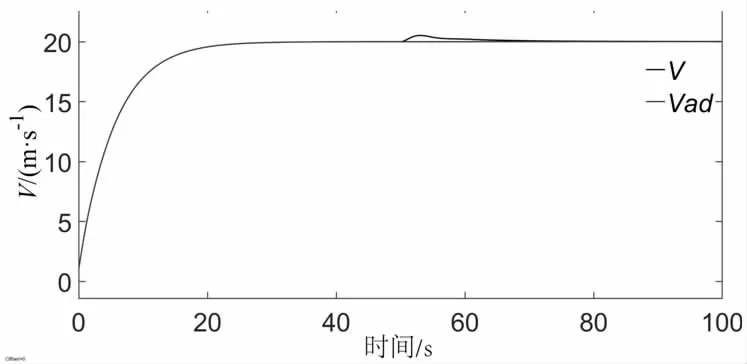
图5 V 真实速度与目标速度
5 结论
本研究采用滑膜控制理论和自适应控制理论,对传感器发生偏置故障的固定翼无人机进行了容错控制设计和飞行控制仿真。主要结论如下:
(1) 设计了一种与控制器无关的自适应观测器,当传感器多通道发生故障时,能在2 s 内识别出故障的大小及通道位置,结合自适应控制理论与李雅普诺夫函数估计传感器故障并解决由故障引起的偏差。
(2) 结合反步法和滑膜控制理论对含传感器故障的固定翼无人机的姿态及速度进行控制,在控制器中加入积分项来不仅减小由滑膜控制输入导致的抖震现象,也减小了平衡时的稳态误差,使无人机能够更好的跟踪目标角度与速度。
