基于方位角和匀速圆周运动的单站无源定位算法
2021-03-18任塨晔房善婷
管 军,任塨晔,房善婷,陆 翔
(中国船舶集团有限公司第八研究院,南京 211153)
0 引 言
单站通过对辐射源目标发射的电磁信号进行截获测向,结合定位算法可实现对目标定位。在无源定位过程中,单站不会向目标发射侦察信号,实现了自身的电磁隐蔽。另外,运动单站在机动中不断改变自身的空间位置,降低了被发现和跟踪的概率。随着参数测量能力和处理能力的提高,单站可以利用测量到的辐射源信号的相位差变化率、多普勒频率、方位角等数据来实现无源定位[1],但这类定位算法的性能往往受限于测量设备以及测量结果的可靠性。考虑到针对辐射源信号的测向结果可靠性、易获取性更高,因此研究基于方位角量测的单站无源定位仍具有重要意义。
对目标进行定位,目标的位置、速度等可算作时变参数,所以针对运动目标的定位问题实际上也是状态估计问题[2]。对于辐射源截获,可获得的观测量只有目标相对于单站的方位角,不可直接观测的量有目标的位置、速度,因此本文将目标的测向结果作为显式观测量,将目标的位置作为隐变量,建立起目标状态方程和量测方程;考虑到量测方程的非线性,采用一种伪线性卡尔曼滤波[3],该滤波算法不依赖初始状态和协方差,且鲁棒性较好,滤波发散情况也得到改善;最后设计仿真试验,在两种典型情况下对所提定位算法的有效性和性能进行验证。
1 系统模型
(1)
(2)
式中,tm为任意参考时刻;ti为观测时刻;下标m、i分别对应时刻tm和ti。

(3)
(4)
(5)
(6)
在ti时刻,将单站观测得到的目标方位角量测记为βi,且
(7)
式中,tan-1(·)为反正切函数;ni为测角误差,是满足独立同分布,且均值为0、方差为σ2的高斯随机变量。
1.1 状态方程和量测方程
(8)
(9)
以单站状态Xo为参考值,用X=Xt-Xo=[x,vx,y,vy]T表示目标的相对状态,由式(8)和式(9)可以得到k+1时刻的离散状态方程为
(10)
考虑到量测数据只有方位角βk+1,量测方程表达式如下:
(11)
1.2 卡尔曼滤波
式(11)是非线性的,上述状态估计问题可采用拓展卡尔曼滤波(EKF)或者不敏卡尔曼滤波(UKF)进行求解,其中EKF依赖初始状态和协方差,可能出现滤波发散,UKF虽有较好的稳健性,但由于涉及矩阵运算,计算量较大[2]。本文采用文献[3]提出的伪线性卡尔曼滤波,通过将式(11)变型,得到
式中,εk+1为有效噪声。
与EKF算法中取βk+1为量测不同,该量测方程中恒以0为量测值,将非线性因素归入噪声εk+1中。该方法不依赖初始状态和协方差,且鲁棒性较好,滤波发散情况也得到改善,具体滤波过程总结如下:
(13)
(14)
(15)
式中,Hk=[sin(βk),0,-cos(βk),0];
(16)
步骤2-5:计算滤波器增益Gk:
(17)
步骤2-6:更新状态:
(18)
步骤2-7:更新协方差:
(19)
1.3 可观测性条件
单站定位问题的可观测性是指通过对单站截获的量测数据进行某种计算,能够确保解出唯一位置结果。文献[4]给出一种单站机动要满足的必要条件,其表达式如下:
(20)
式中,上角标r表示当前量为相对值,即式中相关坐标、速度、加速度是以单站为参考零点的相对值。
由式(20)可知,若单站进行匀速直线运动,则不满足该可观测性条件,因而单站无法在匀速行进中对匀速目标进行定位,定位结果无法保证唯一性。
2 算 法
本文所提出的基于方位角和匀速圆周运动的单站无源定位算法可概括如下,在直角坐标系下:
步骤1:在tk时刻,单站测得匀速运动目标相对于自身的方位角βk,其中tk=kΔT,k=0,1,2,3,…,ΔT为测量周期;
步骤2:自t0时刻起,单站以恒定速率vo进行匀速圆周运动,机动路线按照如下子步骤进行:
步骤2-1:调整单站初速度方向为α0;
步骤2-2:单站作向心加速度大小为a1、方向指向目标所在一侧的匀速圆周运动,并持续时长t1=voθ1/a1,θ1是本段匀速圆周运动对应的圆心角;
步骤2-3:单站速度方向不变,作向心加速度大小为a2的匀速圆周运动,并持续时长t2=voθ2/a2,θ2是本段匀速圆周运动对应的圆心角;
步骤2-4:单站速度方向不变,作向心加速度大小为a3的匀速圆周运动,并持续时长t3=voθ3/a3,θ3是本段匀速圆周运动对应的圆心角;
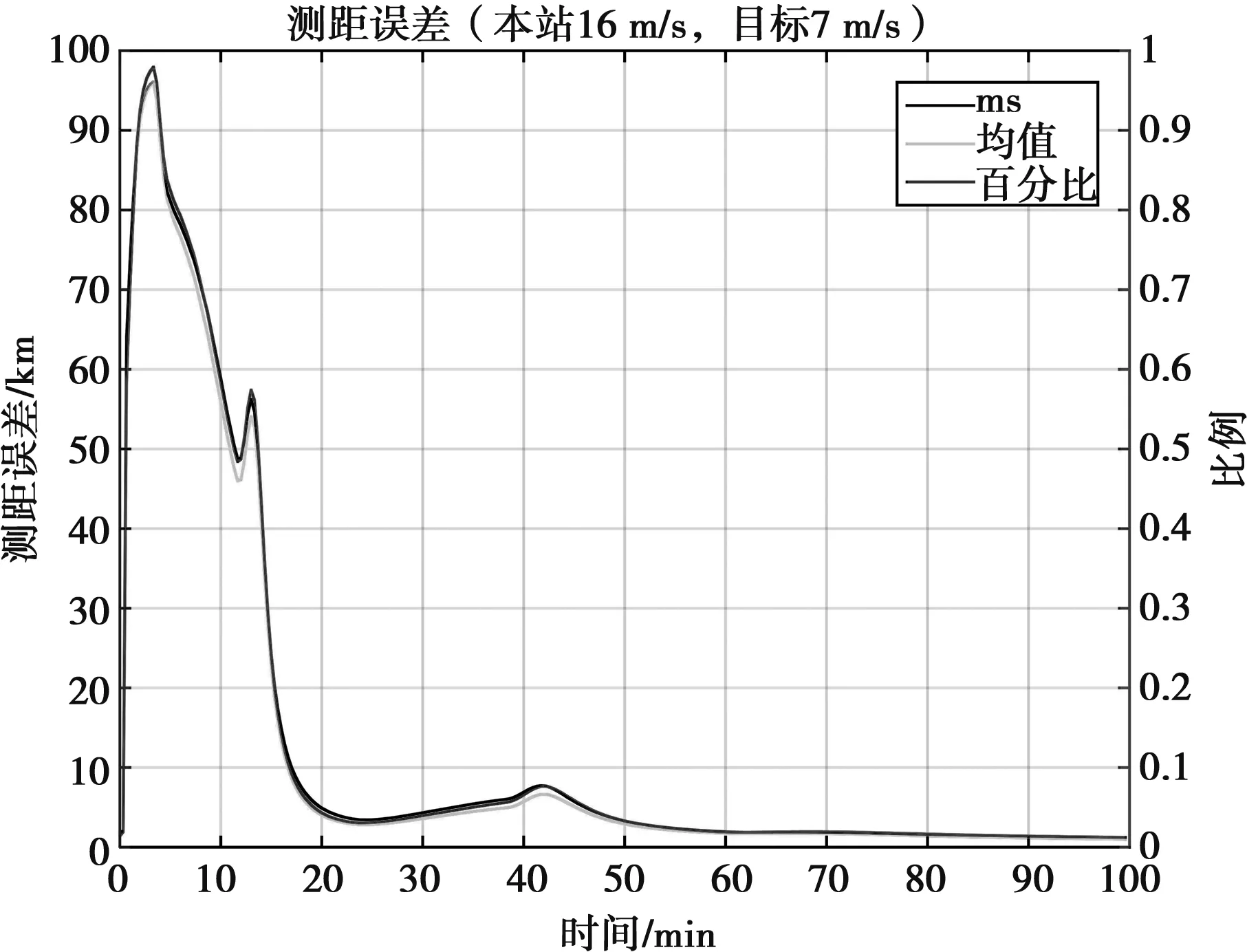
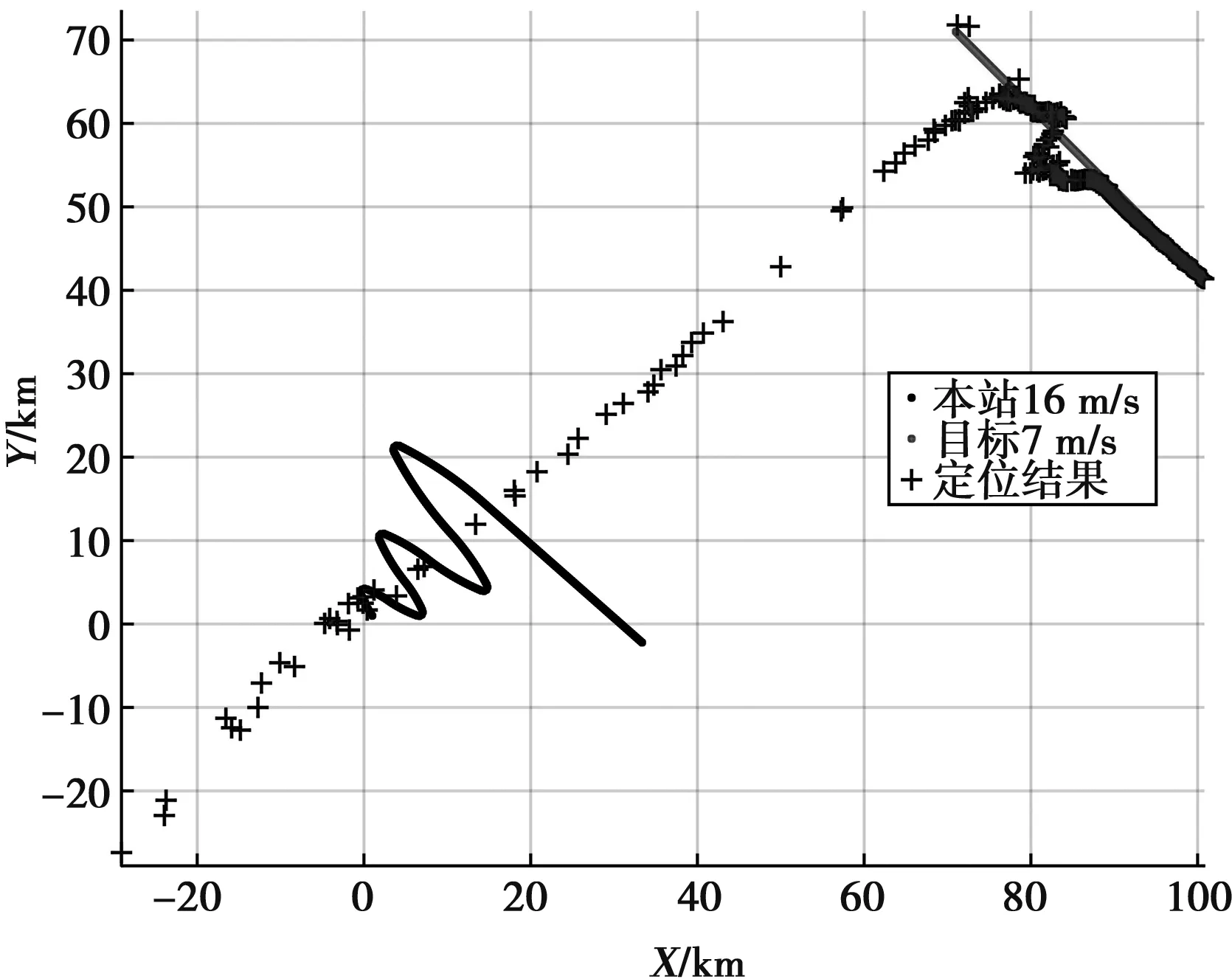
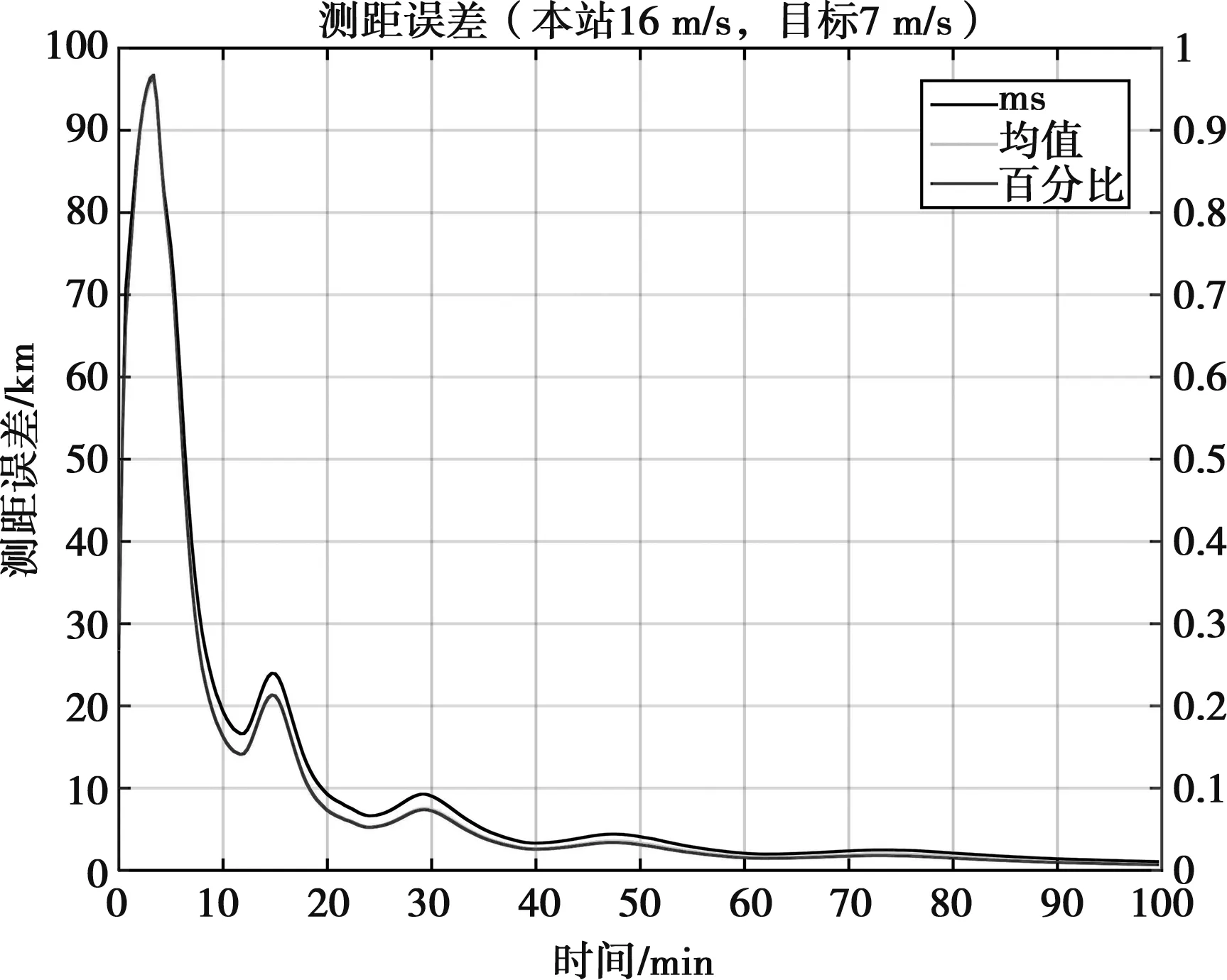
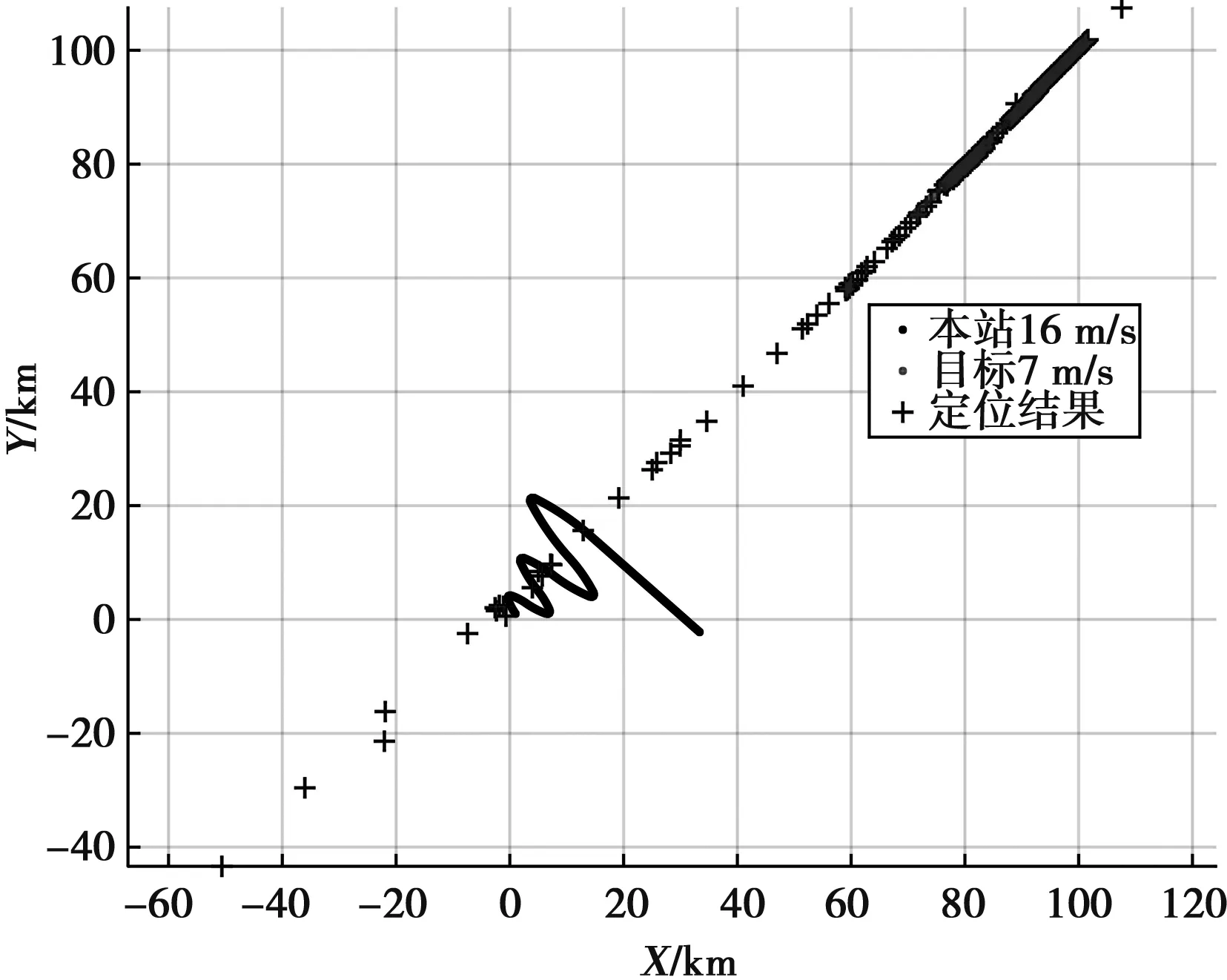
步骤2-5:单站重复步骤2-2到步骤2-4,直到停止对目标定位;其中,α0-θ1-θ2/2=β0;θ3=θ1,且θ1≤30°<θ2,θ1+θ2+θ3≤180°;a3=a1,且a1 通过仿真对本文所述方法的性能进行验证。假设目标初始位置为(71,71),单站初始位置为(1,1),单位均为km,辐射源测角误差标准差为0.53°,采样间隔Δt取23 s,t0时刻单站测得的目标所在方位为β0。 首先考察目标航向与β0方向垂直的情况,假设目标速度7 m/s,航向角为-π/4(以X轴正方向为0,逆时针方向递增);单站速率16 m/s,初始航向α0=θ1+θ2/2+β0,单站机动参数如表1所示。 表1 单站匀速圆周运动参数 104次独立Monte Carlo试验的仿真结果如下。图1给出了单站定位的测距误差随观测时长的收敛曲线。可以看到,测距误差曲线整体随时长增加而收敛,当单站累积观测20 min时,测距误差根均方值(RMS)约为4.9 km,测距误差与单站目标之间实际距离的比值约为4.3%;当单站累积观测40 min时,测距误差RMS约为6.9 km,测距误差与单站目标之间实际距离的比值约为6.6%;其中单次仿真试验的定位结果如图2所示。 图1 目标航向与β0方向垂直时的测距误差曲线 图2 目标航向与β0方向垂直时的单次定位结果 进一步考察目标航向与β0方向平行的情况,假设目标速度7 m/s不变,航向角为π/4;单站机动参数同上,104次独立Monte Carlo试验的仿真结果如下。 图3给出了单站定位的测距误差随观测时长的收敛曲线,当单站累积观测20 min时,测距误差RMS约为9.4 km,测距误差与单站目标之间实际距离的比值约为7.5%;当单站累积观测40 min时,测距误差RMS约为3.3 km,测距误差与单站目标之间实际距离的比值约为2.6%;其中单次仿真试验的定位结果如图4所示。 图3 目标航向与β0方向平行的测距误差曲线 图4 目标航向与β0方向平行的单次定位结果 上述伪线性卡尔曼滤波得到的滤波结果实际上是有偏的[5],在单站机动下,速度估计结果是渐进无偏的,但距离估计结果仍可能是有偏的,因此需要在单站的机动中使得单站在其与目标连线的中垂线方向上产生尽可能大的加速度或角速率,这样伪线性卡尔曼滤波才可能收敛到一个无偏解。本文单站机动方案既考虑到了使单站测得的目标角速度较大,也使单站在拐角处的加速度在单站与目标连线的中垂线方向上的分量较大,因而上述试验中伪线性卡尔曼滤波收敛到无偏解。 本文提出一种基于方位角和匀速圆周运动的单站无源定位算法,单站采取满足可观测性条件的多段匀速圆周运动,使得单站测得的目标角速度较大,也使得单站在拐角处的加速度在单站与目标连线的中垂线方向上的分量较大。随着量测的累加,伪线性卡尔曼滤波的定位精度能够降至10%以内。为进一步缩短卡尔曼滤波收敛时间,后续研究中可以考虑将多源数据如电子侦察目标位置数据等作为先验信息的单站无源定位方法。
3 仿真分析
4 结束语
