吸气式高速飞行器爬升-巡航轨迹在线优化
2022-09-13侯忻宜李惠峰
侯忻宜,李惠峰
(北京航空航天大学宇航学院,北京 100191)
0 引言
吸气式高速飞行器一般由涡轮或冲压发动机提供动力,可充分利用大气层内的氧气进行高效率巡航飞行。吸气式高速飞行器要经历长时间远距离的高速飞行,因此需要合理地设计优化轨迹,以满足不同任务形式的需要。在线自主轨迹优化有利于提高飞行器的自适应和自主决策能力。
目前针对吸气式高速飞行器的轨迹规划研究分别集中在爬升段和巡航段。杨志红等针对吸气式高速飞行器爬升轨迹规划问题,采用高斯伪谱法离散,并用序列二次规划方法求解问题。Zhou等、龚春林等、赵长见等针对吸气式推进和火箭推进的组合动力运载器的上升段轨迹规划问题进行了研究。Liu等采用粒子群和序列二次规划算法求解最优稳态巡航条件。Kang等采用遗传算法和直接打靶法解决了一种考虑燃油消耗和热流率最小的多目标周期巡航轨迹优化问题。Gao 等通过拟合特定周期函数的参数,将伪谱法用于周期巡航轨迹规划问题中。相关研究主要集中在纵向稳态巡航和周期巡航这种固定飞行模式的优化问题中,但是当轨迹规划任务涉及目标到达和禁飞区规避时,这种固定的飞行形式限制了飞行器性能的发挥,并且难以在线应用。对于无动力再入的情况,Liu等、Wang等、Wang等采用基于凸优化的方法对此进行了研究,但是并未考虑吸气式飞行器的推力与状态量之间的相互影响。
本文针对飞行器在三维空间中的运动和目标到达任务,将原最优控制问题凸化和离散化,转化为一系列凸问题进行求解,设计算法的外环迭代策略。
数值仿真实验表明,该方法具有可行性,并且相比于非线性规划算法,在性能指标近似相等的情况下可以大大缩短优化时间,证明了其针对吸气式高速飞行器的轨迹优化问题的最优性和在线应用的能力。
1 优化问题模型
1.1 任务描述
对于采用冲压发动机作为动力的吸气式高速飞行器,一般需要经历机载发射和火箭助推段,助推段结束后关机分离,飞行器进入超燃冲压发动机工作窗口。传统的轨迹设计思路是引导飞行器爬升到固定的高度,然后进行稳态巡航飞行。这种轨迹形式需要进行一定的约束,并且巡航段的飞行模式较为固定,性能难以达到最优。针对这种情况,设计了如图1所示的吸气式高速飞行器的爬升-巡航飞行任务剖面,将飞行器的高度和速度约束放宽,在发动机工作窗口内寻找最优解,有利于最大限度发挥飞行器的能力,得到最优飞行轨迹。优化阶段从发动机点火开始,到达目标上空时结束。
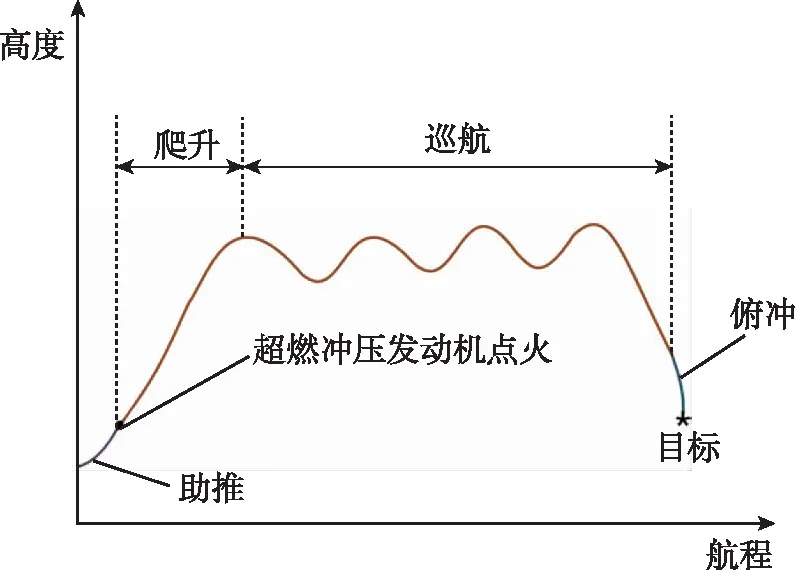
图1 吸气式高速飞行器任务剖面图Fig.1 Mission profile of the air breathing high velocity vehicle
1.2 数学模型建立
本文研究飞行器的质心运动模型,将地球视为均质圆球,考虑地球曲率的影响,建立无量纲化后的三自由度运动方程如下
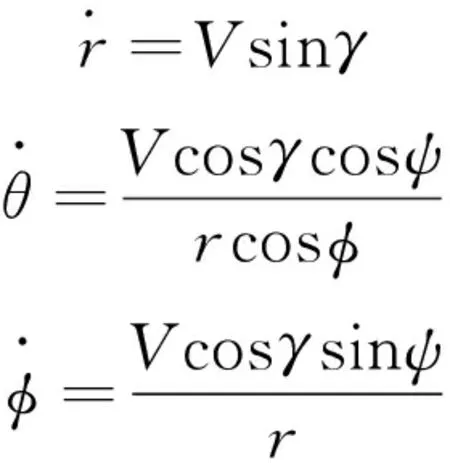




sinsinsin)

2(tansincos-sin)-
(1)

升力和阻力用海平面重力加速度无量纲化,具体表达式如下

(2)
式中,升力系数和阻力系数是关于攻角和马赫数的函数,为飞行器的参考面积,取值为1 m。为大气密度,本文采用“准等温”大气模型,为海平面的大气密度,为基准高度,取值为7.11 km,大气密度可表示为高度的函数
(3)
冲压发动机的推力和燃料秒耗量一般与飞行器的高度、马赫数、攻角和燃油当量比有关,可以表示为=(,,,),=(,,,),根据飞行器和发动机模型进行插值或者拟合得到。
1.3 最优控制问题建模
1.2节给出了飞行器的运动方程以及相应的状态量和控制量。本节将建立相应的最优控制问题模型。飞行器的状态变量选取为=[,,,,,,],控制变量选取为=[,,]。
1)性能指标:在飞行器总航程固定的情况下,优化指标设置为飞行器到目标时的终端质量最大
Minimize:=-
(4)
2)运动方程:1.2节式(1)所示的运动方程,用状态量和控制量写为紧凑形式
(5)
约束条件:优化的初始状态为助推段结束时的状态,此时飞行器进入冲压发动机开机窗口。初始状态=[,,,,,,]中的参数也相应进行无量纲化处理,约束如下
()=
(6)
式中,=+表示时刻飞行器的地心距,和是飞行器初始时刻所处的经度和纬度,,和分别为时刻的速度大小、飞行路径角和航向角,为飞行器在时刻的质量。
飞行器在巡航段末端需要到达目标点,用经纬度表示为(,),终端时刻处的经度和纬度为()和(),因此终端时刻的约束条件为
()=,()=
(7)
受冲压发动机开机条件限制,飞行器的攻角需要保持在一定范围内,和分别为攻角能够取得的最小值和最大值。发动机的燃油当量比∈[,],本文中的范围取为[02,1]。和分别为地心距的下限和上限。和为维持发动机工作所需要的最小速度和最大速度。为飞行器初始质量,表示飞行器的净质量。状态量和控制量的不等式约束形式如(8)所示
≤≤,≤≤,
≤≤,≤≤,
≤≤
(8)
一般来讲,飞行器在巡航飞行段可能会遇到禁飞区,用经度和纬度表示禁飞区的圆心位置,表示半径,禁飞区不等式约束如下
(-)+(-)≥
(9)
式中,和分别为禁飞区圆心的经度和纬度,为禁飞区半径,以弧度为单位。
综上所述,飞行器巡航段轨迹优化问题可建模为如下形式的最优控制问题Problem1。
Problem1:
Minimize:(4)
Subject to:(5)(6)(7)(8)(9)
2 轨迹优化算法
2.1 最优控制问题线性化



(10)
式中



(11)

在性能指标中加入控制量邻近项

(12)

=+
(13)

(14)
可以看出,式(12)经过松弛后,转换为如式(13)和(14)所示的线性形式的性能指标和不等式约束,相应地得到Problem2。
Problem2:
Minimize:(13)
Subject to:(10)(6)(7)(8)(11)(14)
2.2 离散化
在最优控制问题Problem2中,状态变量和控制变量均为关于时间的连续函数,采用一阶保持器离散方法将状态量和控制量进行离散化处理。
取离散点数目为,初始时间为,终端时间为,间隔为Δ=(-)(-1),相应的离散时间点为=+(-1)Δ,=1,2,…,。将控制输入参数化为样本点之间的线性函数

(15)
经过状态转移离散后的系统为
+1=+1+2+1+,
=1,2,…,-1
(16)
其中系数矩阵为

(17)
式(10)的线性微分方程转化为式(16)所示的线性等式约束,其中待优化的变量只有和。
对于存在禁飞区的情况,将式(11)表示的约束离散化,得到线性不等式约束


(18)
然后,对式(14)也进行离散化处理

(19)
离散后的=[1,2,…,],式(19)可进一步写为

(20)
将式(20)转化为标准的二阶锥约束形式
(21)
Problem3是一个标准的二阶锥规划问题,它属于迭代算法中的一个子问题,优化变量包括状态量={,,,,,,}和控制量={,,},=1,2,…,以及参数,=1,2,3。
Problem3:
Minimize:-+++
Subject to:
=,=,=


≤≤,≤≤,
≤≤,≤≤,
≤≤,=1,2,…,
(22)
2.3 序列凸优化迭代算法
序列凸优化算法伪代码见表1,选取离散形式的两次迭代地心距之差最大值作为误差,当两次迭代结果之间的误差小于规定值时,可认为轨迹收敛。

表1 算法伪代码Tab.1 Algorithm pseudocode
序列凸优化算法的流程如图2所示。
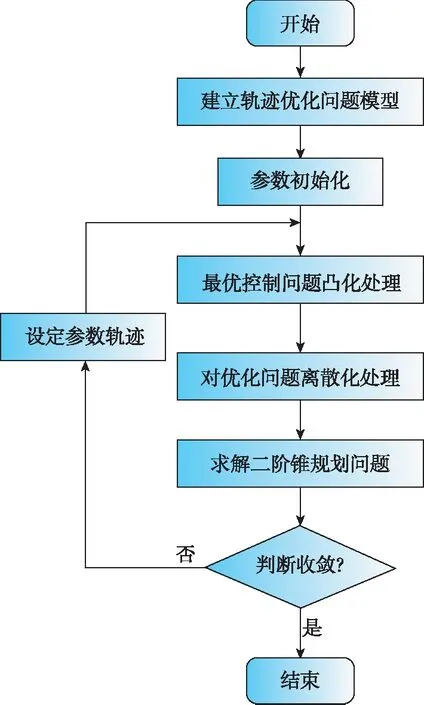
图2 算法流程图Fig.2 Algorithm flow chart
3 数值仿真算例
针对某型吸气式高速飞行器进行巡航段的轨迹优化数值仿真实验,优化阶段包括冲压发动机从开机到关机的整个飞行过程,飞行时间为920 s。
飞行器的初始高度为20 km,速度为1 200 m/s,质量为5 000 kg,初始经纬度和飞行路径角分别为0°,航向角为30°。终端经度和纬度分别为9.5°和5.5°。飞行过程中高度的取值范围为20~30 km,速度范围为1 200~1 800 m/s,攻角范围为0°~5°,燃油当量比范围为0.2~1,飞行器净质量为4 000 kg。
仿真中采用的参数如表2所示。经纬度初始参考选为初始位置和终端位置两点连线。质量的初始参考设计为从飞行器总质量到净质量的线性变化形式,燃油当量比的初始参考也采用从到的线性变化形式。其他状态量和控制量的初始参考无特殊要求,一般为初始时刻的常值即可。
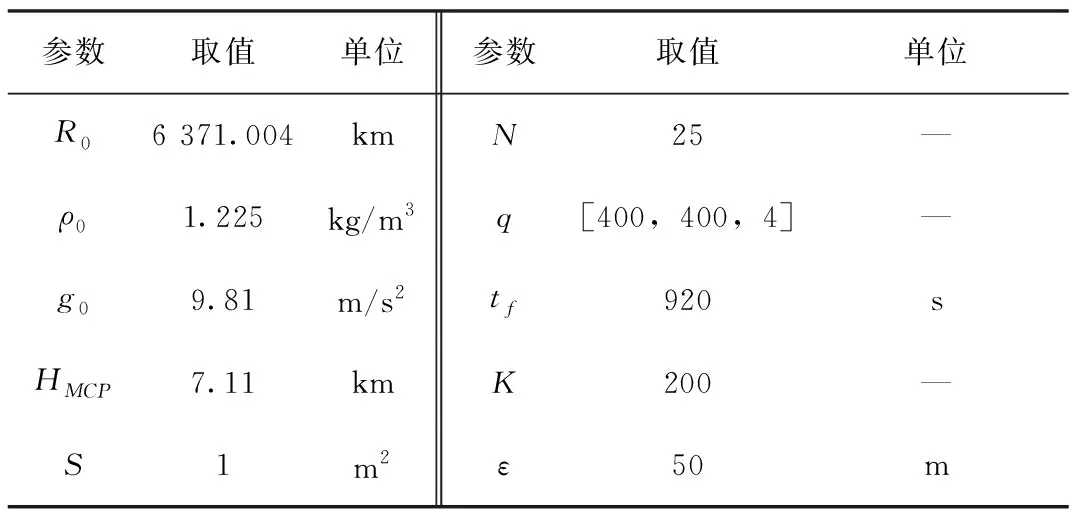
表2 仿真参数值Tab.2 Simulation parameters
采用MATLAB软件进行数值仿真实验,实验用笔记本电脑处理器型号为i5-10210U,主频为1.60 GHZ,每次迭代的二阶锥规划问题采用ECOS求解器进行求解,当最大位置误差小于时迭代结束。轨迹优化算法经过19次迭代后,相邻两次迭代的位置误差小于规定值,算法终止,仿真耗时0.065 4 s,满足在线轨迹优化的要求。使用GPOPS工具箱的优化结果作为最优参考,优化时间为12.713 4 s,共进行了3次网格自适应迭代,网格划分精度为10。
图3和图4分别为状态量和控制量曲线的收敛结果与最优参考的对比,可以看出飞行器完成了目标到达任务,轨迹形式与预期一致。在20 km高处,发动机点火,飞行器开始爬升,在26 km附近进行波动飞行,受攻角条件和发动机推力约束限制,飞行高度在24~30 km范围内变化,接近目标上空时高度下降至23 km。优化结果曲线和GPOPS结果曲线变化趋势一致,收敛至近似局部最优解,仿真结果证明了算法的最优性。
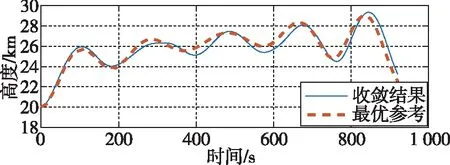
(a) 高度-时间曲线
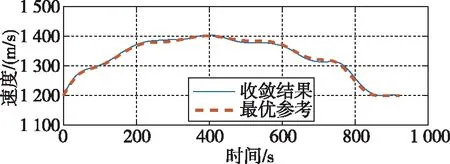
(b) 速度-时间曲线
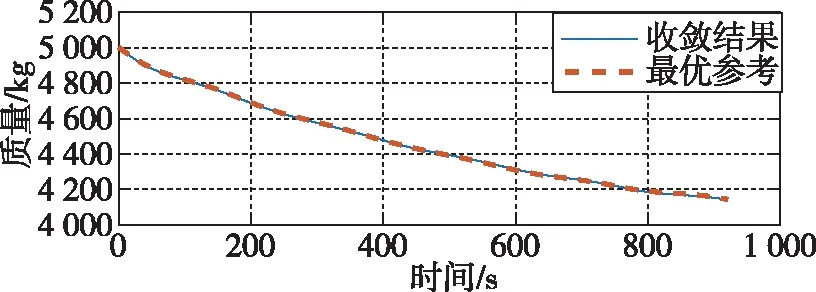
(c) 质量-时间曲线图3 状态量对比图Fig.3 Comparison of state
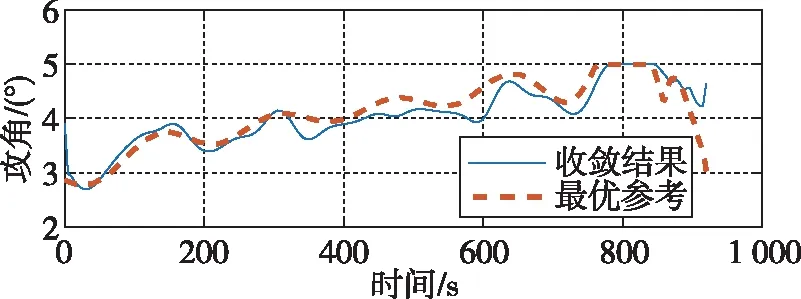
(a)攻角-时间曲线

(b) 燃油当量比-时间曲线
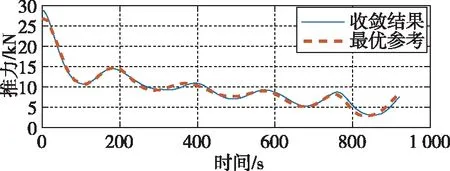
(c)推力-时间曲线图4 控制量对比图Fig.4 Comparison of control
从图3中可以看出,飞行器的高度和速度均满足约束,处于冲压发动机开机窗口范围内。质量变化曲线图显示,终端燃料剩余142 kg,GPOPS优化结果为144 kg,相差只有2 kg,二者优化得到的性能指标差异约为1%。
从图4可以看出,飞行器的攻角约束满足,在2°和5°之间变化。燃油当量比随时间增加逐渐从1变为0.2,与初始参考的变化趋势一致,相应的推力变化范围为0~30 kN,随节流系数的增加,推力总体呈下降趋势。
图5为终端质量性能指标随迭代次数的变化曲线图,在经过19次迭代后,终端质量达到4 142 kg,此时迭代结束。图6显示了相邻两次迭代的位置和速度的误差绝对值的最大值随迭代次数变化的曲线。位置和速度误差在迭代初期变化较大,后期逐渐减小,最后一次迭代和上一次迭代之间的差值分别为7.6 m和0.11 m/s,证明轨迹收敛。图7显示了相邻两次迭代的攻角和燃油当量比的误差绝对值的最大值随迭代次数变化的曲线。攻角误差曲线在前期有小范围的波动,11次迭代后小于10。燃油当量比误差曲线在2~12次迭代之间略有波动,与其他变量相比收敛难度更大,但12次迭代后趋于收敛。仿真结果表明轨迹收敛效果良好。
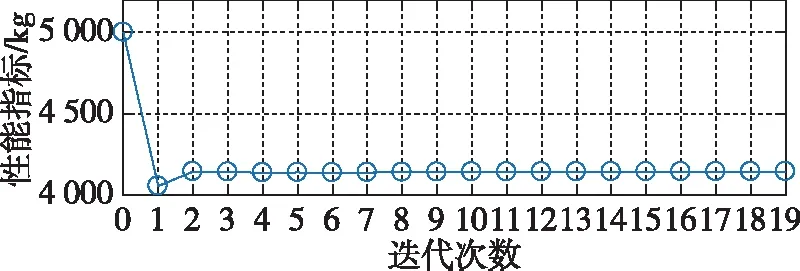
图5 性能指标随迭代次数变化图Fig.5 Value of the performance index at each step
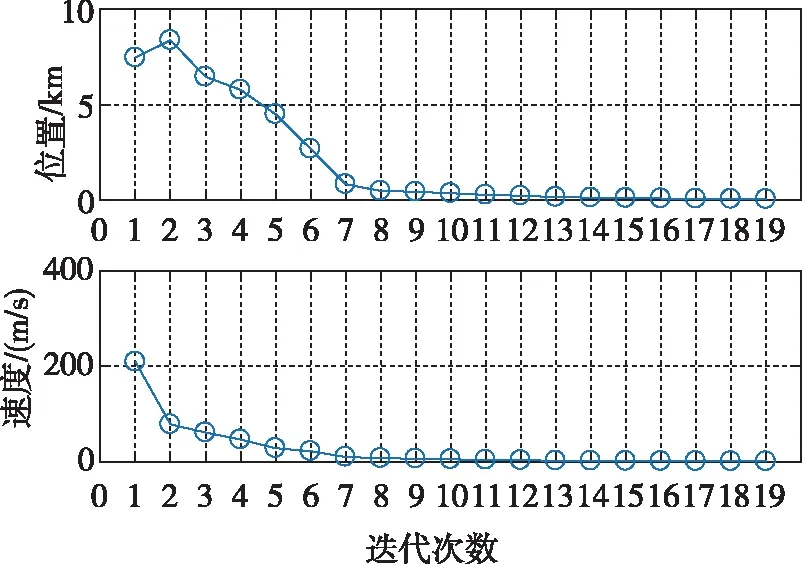
图6 位置和速度误差随迭代次数变化图Fig.6 Position and velocity error at each step

图7 攻角和燃油当量比误差随迭代次数变化图Fig.7 AoA and throttling coefficient error at each step
作为对比,采用GPOPS进行多阶段轨迹优化,将不同工况下采用爬升+稳态巡航方式的优化结果列在表3中。表格中的数据分别表示不同巡航高度和速度下,飞行器到达目标时剩余燃料的质量。表3中巡航高度为26 km时,最大的剩余燃料质量为65 kg,相比于图2的终端剩余燃料142 kg,爬升+稳态巡航的飞行方式多消耗燃料约7.7%。仿真结果证明,本文提出的爬升巡航优化轨迹比稳态巡航轨迹更省燃料,飞行器具有更大的能力应对突发状况或进行后续机动。

表3 稳态巡航优化结果Tab.3 Steady-state cruise optimization results
对于存在禁飞区约束的情况,算法步骤同上。本文设置3个禁飞区,在经纬度图中表示禁飞区中心和半径,如表4所示。
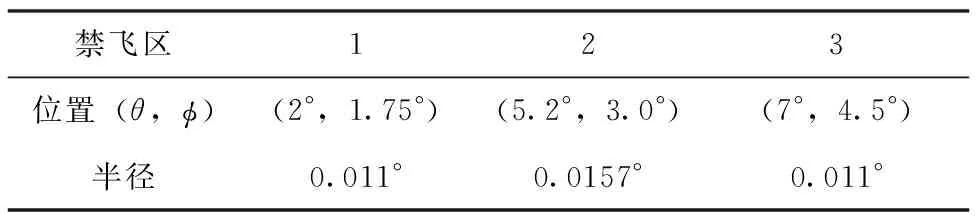
表4 禁飞区中心和半径Tab.4 Center and radius of the no-fly zone
图8为优化得到的经纬度图,图中黑色虚线表示初始参考轨迹,红色点划线表示算法迭代两次后得到的轨迹,蓝色实线表示最终收敛结果。仿真结果表明,飞行器能够完成禁飞区规避任务,到达目标点,算法求解时间0.088 5 s,满足巡航段在线轨迹优化要求。

图8 经度-纬度图Fig.8 Longitude-latitude
4 结论
1)对吸气式高速飞行器进行了爬升巡航段在线轨迹优化,将爬升段和巡航段作为整体进行优化,扩大了飞行器的高度和速度约束范围。爬升巡航整体优化得到的轨迹燃料消耗更小,飞行器具有更大的能力应对突发状况或进行后续机动,避免了传统的定高定速巡航的轨迹形式具有的局限性。
2)设计基于凸优化的序列优化算法在线求解轨迹优化问题,将原最优控制问题在参考轨迹处进行凸化和离散化后,转化为标准的二阶锥规划问题,基于内点法进行求解。数值仿真实验表明,该算法的求解时间满足在线轨迹优化的要求。算法求解得到的轨迹与最优参考接近,性能指标相差仅为1%,验证了算法的最优性。
