一种基于四面体单元的变形翼骨架设计与分析
2022-09-05肖洪郭宏伟张蒂杨广刘荣强楼云江李兵
肖洪,郭宏伟,*,张蒂,杨广,刘荣强,楼云江,李兵
1. 哈尔滨工业大学 机器人技术与系统国家重点实验室,哈尔滨 150001 2. 哈尔滨工业大学(深圳) 机电工程与自动化学院,深圳 518055
近年来,随着军事和民用领域对飞行器的应用需求日益复杂和多样,迫切需要飞行器具有更大的飞行空域和速域,具备更高的机动灵活性,使飞行器能够兼顾高低空、高低速飞行。传统的固定布局飞行器由于几何形状基本不变,很难实现这一目标。因此,需要飞行器具有变构型的功能,以适应不同的飞行环境,执行更多的飞行任务。机翼是飞行器在飞行过程中可重新构型的主要部件,在飞行中有目的地改变机翼外形,如变后掠、变面积、变翼展和变弯度,能够有效提高升阻比和飞行效率,降低燃油消耗并增大航程,甚至能够使飞行器从地面起飞,穿越大气层执行各种侦察与打击任务,实现空天一体化作战。把这种机翼形状可变的飞行器称为“可变体飞行器(Morphing aircraft)”。
国外针对变形翼的研究中,洛克希德·马丁公司设计了一种可变展长的Z型折叠翼无人机,机翼可实现类似于鸟类翅膀的折叠,减小了机身表面积和低空跨声速飞行时的阻力,机翼折叠变形角度达到130°,并进行了0.9马赫条件下的风洞试验。新一代航空公司研制了MFX-1和MFX-2无人机,后掠角和翼面积由若干四连杆机构、旋转连接键和滑动机构控制,MFX-1可实现翼面积变化70%,展弦比变化200%,展长变化40%;MFX-2翼面积变化40%,展弦比变化177%。美国CSA公司设计了一种变展长机翼结构,其基本结构为多个铰接的菱形单元,该机翼机械结构由磁滞伸缩液压泵驱动。美国CRG公司提出了一种可变弦长机翼的内部结构,该机翼结构由相互滑动的金属肋和形状记忆聚合物泡沫组成,机翼内部填充一定量的形状记忆聚合物泡沫,对其进行热刺激后可以实现机翼变形。美国F1exSys Inc公司提出了一种后缘弯度能够连续变化的机翼结构,运用该结构能够实现机翼的后缘偏角在-10°~+10°之间变化。斯坦福大学的王清研究员设计了一种基于铰接合页结构的变展长机翼机构。
国内针对变形翼的研究中,西北工业大学的葛文杰等提出了一种适用于变形机翼的柔性变形机构,分别采用载荷路径法和变密度法对机翼的前缘和后缘进行了拓扑优化,分析了几何参数与飞行性能参数之间的关系。中国科学技术大学的董二宝研制了基于SMA全向偏转致动器的头部智能变形结构,试验测试该结构全向偏转角大于5°,最大偏转角可高达9°。中航动力技术研究院的陈钱等提出了一种能够提高升阻比和降低阻力的变展长和变后掠翼身组合体的机翼构型,并通过风洞试验验证了该模型的优点。张科等以变形机翼主承力结构-鱼骨为研究对象,提出了一种基于逆向有限元算法与位移分段叠加相结合的变形监测方法,实验结果辨明逆向有限元法能准确重构鱼骨变形形状。何萌等使用雷诺-平均方程对襟翼不同后缘偏角采用遍历的方式进行了气动力评估,得到后缘襟翼最佳偏角。
根据飞行器机翼的变形需求,提出了一种基于四面体单元的桁架式变形翼骨架,该骨架可实现展向弯曲、扭转、变后掠等多种变形形式,具有自由度多及分布式驱动的特点。基于理论分析与有限元仿真,获得了变形翼骨架的运动学和力学特性,最后,研制了六单元变形翼骨架原理样机,并进行了多自由度变形功能验证试验。
1 基于四面体单元的变形翼骨架构型设计及参数分析
1.1 四面体单元的构型设计与参数优化
多个三角形板单元通过铰链连接可以组成一个平面线性机构,该机构可实现弯曲、扭转等变形形式。桁架机构具有质量轻、强度高等优点,广泛应用于各类支撑机构中,用四面体单元代替三角板,即可得到与上述机构有着相同运动形式的等效机构,如图1所示。
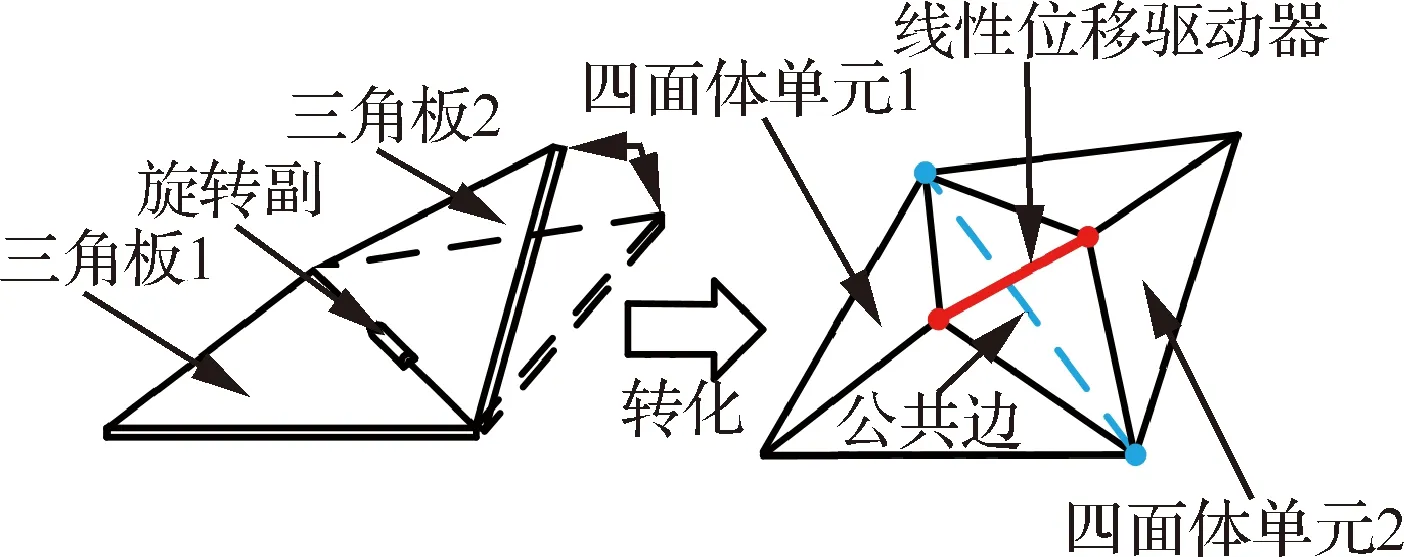
图1 两四面体等效机构Fig.1 Two tetrahedral equivalent mechanisms
将图1所示四面体桁架机构进行拓展,即可得到四面体桁架线性机构,当所有线性位移驱动器同时伸缩或者伸长时,线性桁架机构呈现上弯或下弯的运动状态;当相邻线性位移驱动器交错伸长缩短时,线性桁架机构呈现扭转的运动状态,如图2所示。

图2 四面体桁架结构变形状态Fig.2 Deformation state of tetrahedral truss structure
取一个四面体单元进行受力分析,其受到集中力作用,杆件的平均直径为,长度为,单元高度为,如图3所示。
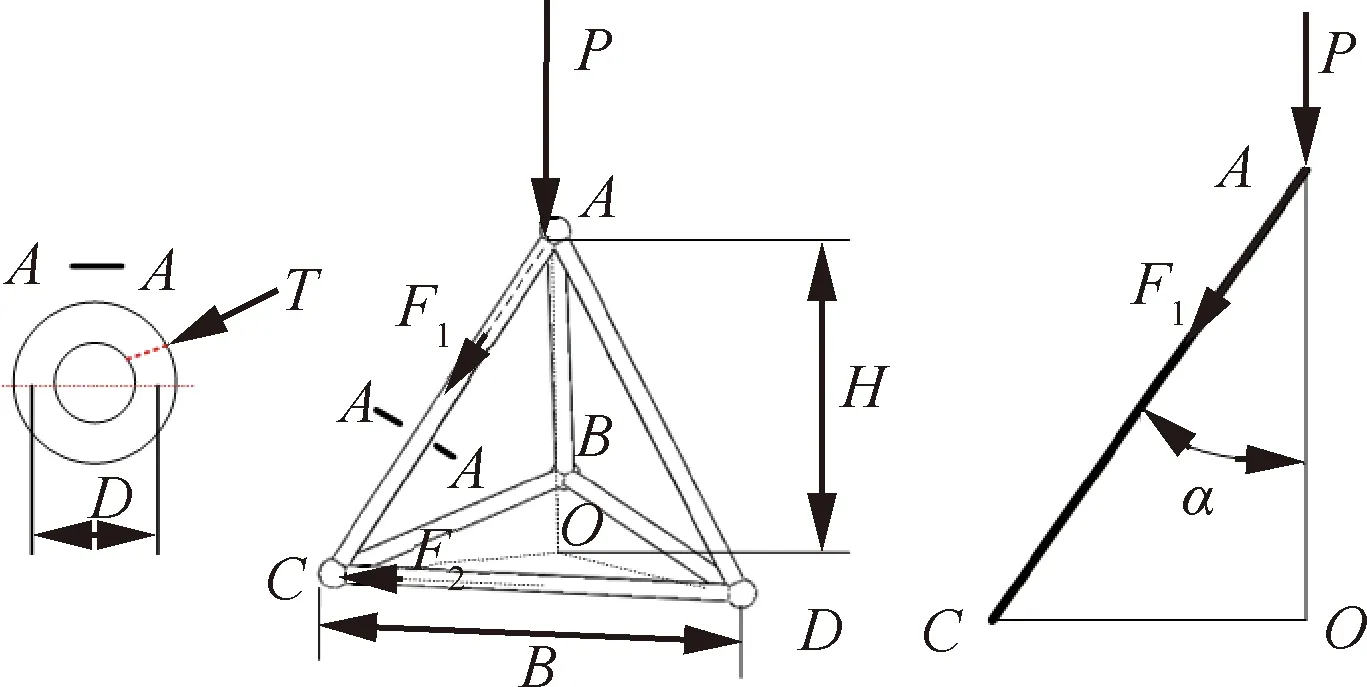
图3 四面体单元结构受力图Fig.3 Stress diagram of tetrahedral element structure
对于杆件,其受到的压力及截面上的压应力为

(1)
式中:为杆件受到的压力;为空心杆件的壁厚。对于杆件,其受到拉力作用,杆件上的拉力及截面上的拉应力为
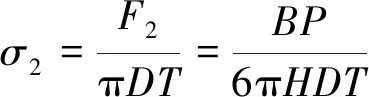
(2)
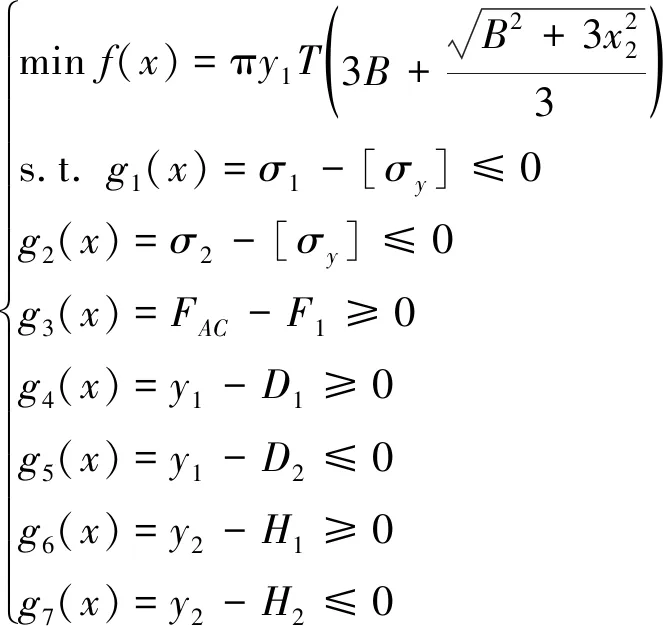
式中:为杆件受到的拉力。以杆件的平均直径和高度作为设计变量,以四面体单元的体积最小作为优化目标,以杆件和杆件的强度及稳定性条件作为约束,得到优化模型:
(3)
式中:[]为材料许用应力值;为杆件的失稳临界压力。四面体杆件选用碳纤维材料,其弹性模量约为20 GPa,屈服极限约为4.5×10MPa,设空心杆件厚度为=1 mm,底边长度为=300 mm,平均直径的取值为4 mm≤≤15 mm,高度取值范围为20 mm≤≤200 mm,外界载荷=5 000 N。经计算,可得优化后的结果为
(4)
式中:、和为设计变量。
1.2 单元连接球形接头构型设计
变形骨架是由多个四面体单元串联而成,相邻两四面体单元共用一根杆件,四面体单元之间需实现相互转动,因此要求复合旋转铰链既有连接功能又可绕公共轴做相对转动。对球形接头进行了详细的设计与分析,内外球形接头由大小两个共球心的球面结构组成,通过共用杆插入连接孔实现球面结构的连接,并且可以绕共用杆相对转动,各连接杆延长线汇交于球心。接头的结构形式及尺寸参数如图4所示。

图4 球形接头构型参数Fig.4 Configuration parameters of spherical joint
球形接头的旋转角度满足:=180°---,为四面体单元1斜边与底边夹角;为四面体单元2斜边与底边夹角,而、由四面体桁架尺寸结构决定,且有=,可得:
(5)

(6)
式中:为球形接头内环面半径;为球形接头孔半径;为孔间距的一半;为球形接头孔与边缘距离。根据式(5)和式(6),即可求出在给定尺寸下,球形接头的最大转角。
2 骨架分布式驱动设计与运动学分析
2.1 变形翼骨架分布式驱动设计
通过连接接头将变形单元进行线性连接,利用四面体线性桁架机构作为变形翼骨架,可以实现机翼的展向弯曲、扭转和变后掠等变形形式,变形翼骨架三维示意图如5所示。

图5 变形翼骨架结构示意图Fig.5 Structural drawing of deformed wing framework
上述结构是由5个四面体桁架单元加上两个1/2四面体桁架单元组合而成,结构中包含7个线性位移驱动器,依次编号为1~7,优化后得到的变形翼骨架三维示意图如6所示。
当1~6号驱动器均伸长时,机翼产生向下弯曲变形,如图6(a)所示;当1、3、5号驱动器伸长,2、4、6号驱动器缩短时,机翼产生扭转变形,如图6(b) 所示;当1、7号驱动器伸长,其他驱动器长度保持不变时,机翼后掠角产生变化,如图6(c) 所示。
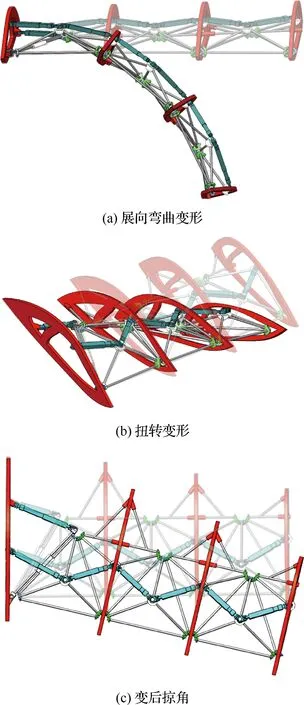
图6 机翼骨架变形示意图Fig.6 Schematic diagram of wing frame deformation
2.2 变形翼骨架运动学分析
使用D-H法建立坐标系,由于相邻旋转副轴线相交于一点,因此其公垂线垂直于其轴线组成的平面,在空间坐标系中与对应的轴重合,同理,用单位矢量、、…、表示相邻轴线的公法线方向,各运动副的运动轴线用、、…、进行表示,固定坐标系原点建立在桁架结构的左下端,轴垂直于纸面向外,轴水平向右与桁架初始伸展方向一致,初始状态桁架结构所有旋转副旋转角度均为0,其中,由于为固定坐标系,因此=0恒成立,此时骨架机构处于水平状态。

图7 骨架机构空间坐标系示意图Fig.7 Schematic diagram of spatial coordinate system of skeleton mechanism
根据上述空间坐标系位置关系,可以得到


(7)
式中:为运动副的运动轴线;为轴线0与轴线1的公法线方向;为变换矩阵。规定逆时针转动为正方向,坐标系相对于坐标系绕旋转了,因此可以得到

(8)
根据桁架结构空间坐标系建立规律,根据递推公式,可分别求出、和(+1)(=0,1,…,5)。为验证该方法的正确性,以四面体线性桁架机构最右端点为参考点,令6个输入角由-30°~30°同步变化,分别利用D-H法以及影响系数法计算点的位置坐标,运动位置曲线如图8所示。
当输入角同步在-30°~30°变化时,可以得到点的空间轨迹,如图9所示。
假设6个输入角的输入范围为-30°~30°。以最末端点为例,可以计算得到其在空间的运动分布,如图10所示。

图8 点S三个方向位移量随输入角变化曲线Fig.8 Curves of displacement in three directions of point S
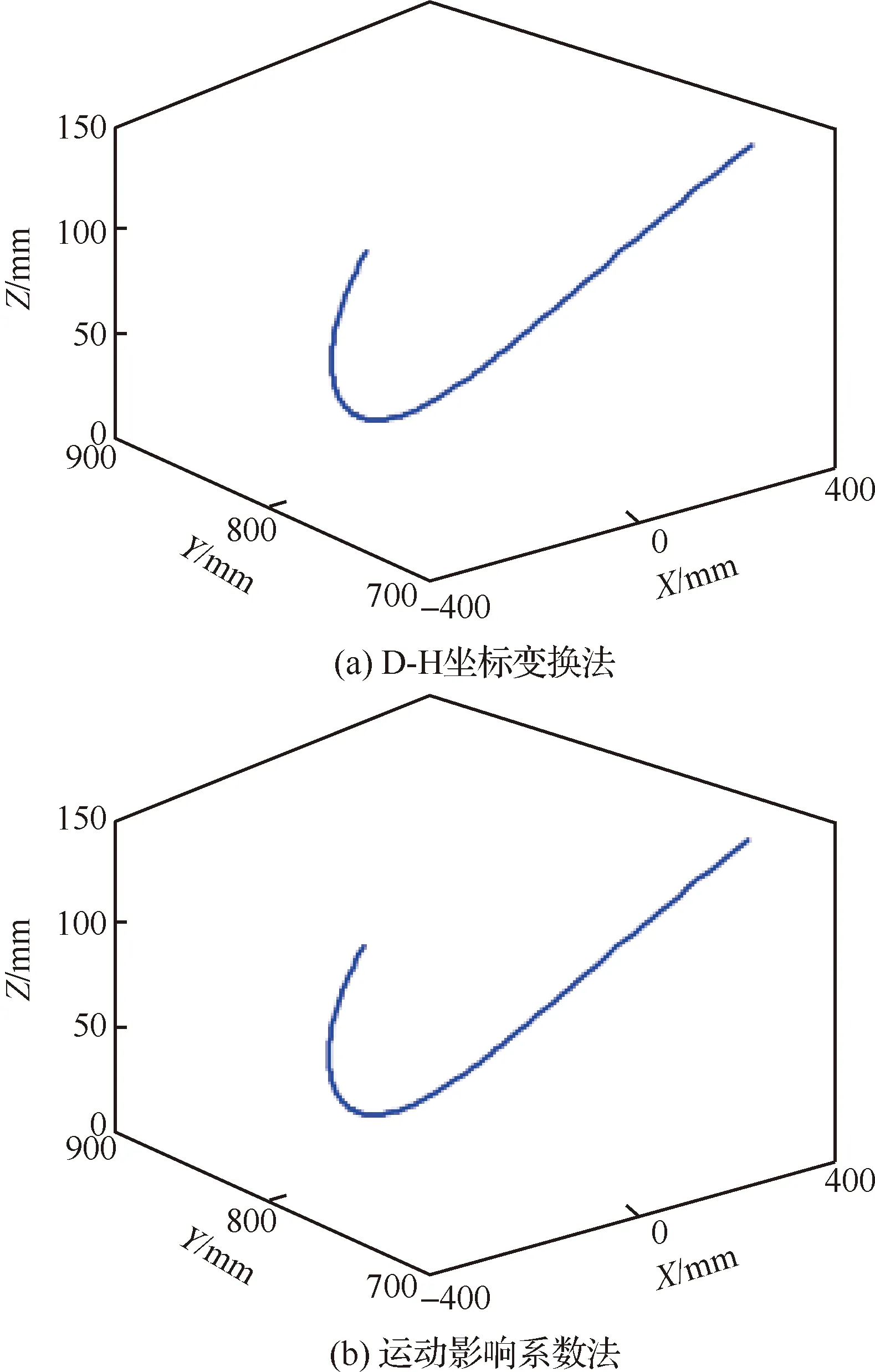
图9 点S空间运动轨迹Fig.9 Space trajectory of point S

图10 点S运动空间示意图Fig.10 Motion space diagram of point S
3 变形翼骨架力学特性分析
3.1 变形翼骨架静力学分析
1) 四面体单元抗压刚度分析
四面体桁架单元在顶点受压力作用时的受力分析如图11所示,此时3个斜杆中承受的压力为′。

图11 四面体桁架单元受压示意图Fig.11 Compression diagram of tetrahedral truss element
四面体单元轴向抗压刚度可以表示为


(9)
式中:EA为四面体单元的单元抗压刚度;为顶点距四面体底面高度;Δ为顶点距四面体底面高度变化量;为斜杆长度;Δ为斜杆长度变化量;为斜杆与底面夹角,Δ为夹角变化量。假设斜杆是厚度为1 mm的空心碳纤维管,其弹性模量为20 GPa,外径为,则有
EA=20×10××[-(-0001)]sin
(10)
可以得到斜杆直径以及夹角对四面体桁架单元刚度的影响情况,如图12所示。
由上述变化趋势知,四面体桁架单元的抗压刚度EA与斜杆直径以及斜杆与底面夹角有关,当这两个参量递增时,抗压刚度EA随之增加。
2) 四面体单元抗弯刚度分析
四面体单元的截面投影图如图13所示,定义斜杆在平面的投影点到坐标原点的连线与轴的夹角为斜杆在该投影截面的方位角。

图12 抗压刚度与影响参数关系图Fig.12 Relationship between compressive stiffness and influencing parameters
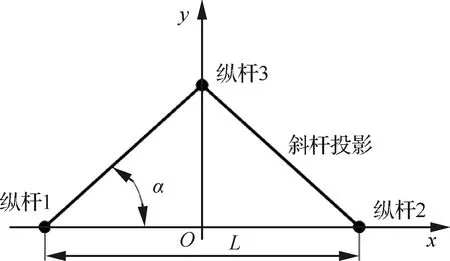
图13 四面体单元的截面投影图Fig.13 Section projection of truss structure
由图13可知,纵杆1和2与轴的距离为==/2,纵杆3与轴的距离为=0,因此可得到桁架结构对轴的惯性矩为

(11)
式中:为杆的截面面积;为四面体桁架单元底面三角形边长;为纵杆与轴的距离。假定杆件材料为碳纤维,其弹性模量为20 GPa,因此桁架单元的抗弯刚度为

(12)
式中:EI为四面体单元的抗弯刚度。可以得到杆直径以及底边长对四面体单元弯曲刚度的影响情况,如图14所示。
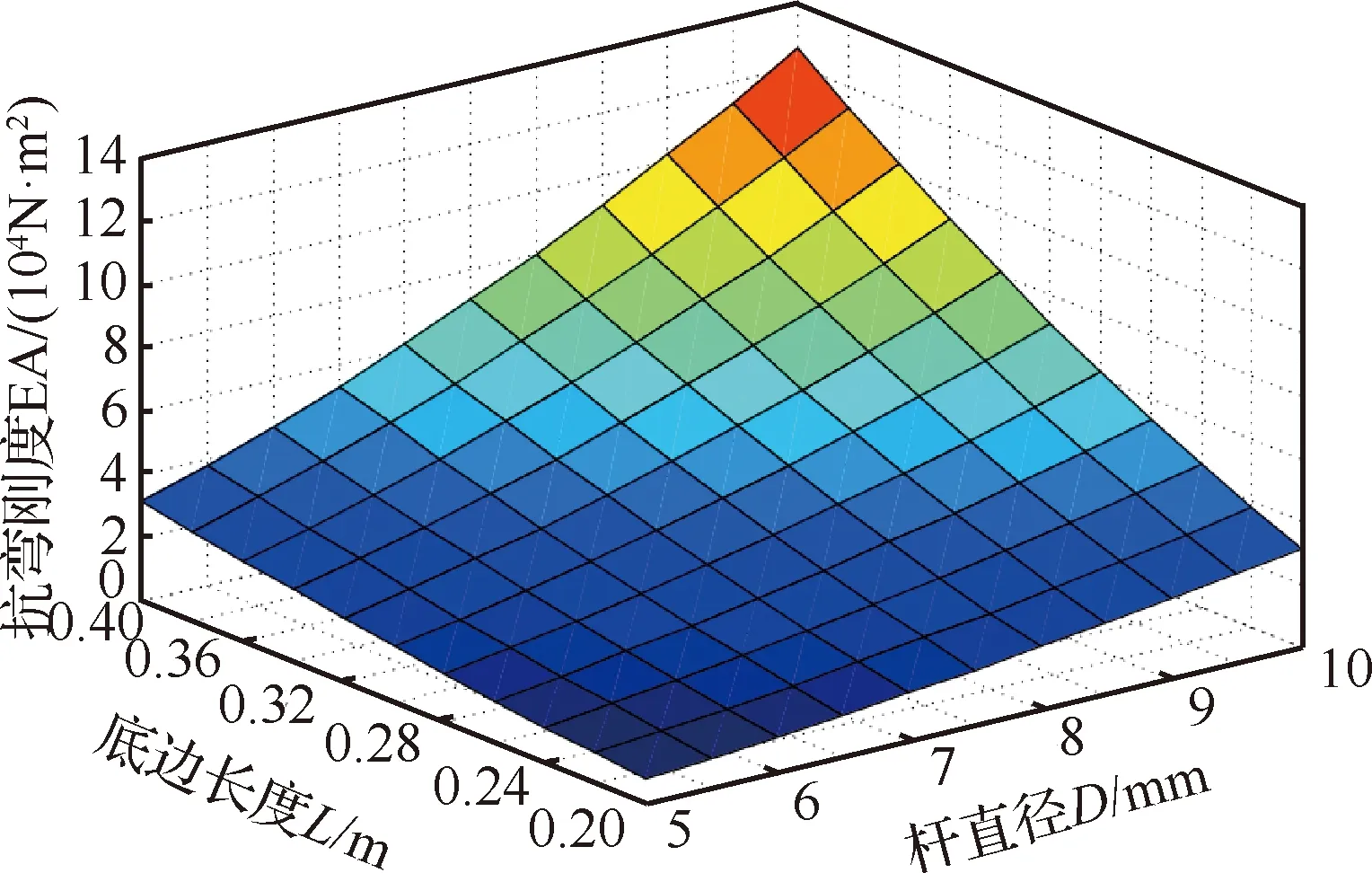
图14 抗弯刚度与影响参数关系图Fig.14 Relationship between compressive stiffness and influencing parameters
由上述变化趋势知,四面体线性桁架的抗弯刚度EI与杆直径以及四面体底面三角形边长有关,当这两个参量递增时,抗弯刚度EI随之增加。
3) 变形翼骨架静力学仿真
在Ansys中建立一个6单元线性骨架结构,结构中四面体单元的底边长为284 mm,顶点高度为50 mm,截面半径为4 mm,厚度为1 mm,杆件材料为碳纤维;驱动器截面为6 mm的实心杆件,材料为结构钢。在变后掠控制部位施加固定约束,在第6个四面体单元的顶点处施加一个大小为=100 N垂直向下的力,第6个单元的前缘位置施加一个大小为=100 N沿弦向向后的力,其有限元模型如图15所示。

图15 6单元骨架结构有限元模型Fig.15 Finite element model of 6-element truss skeleton
计算得到其变形云图和应力云图如图16所示。由图16可知,变形最大量在桁架末端,形变量约为3.77 mm;应力最大值在变后掠控制部位,应力最大值约为88.26 MPa。
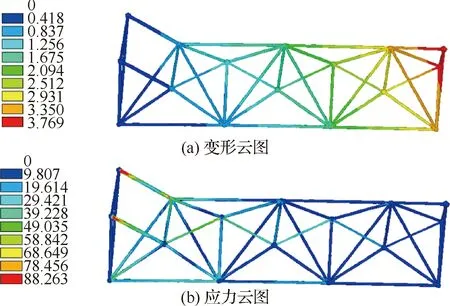
图16 等截面直径杆件变形及应力云图Fig.16 Deformation and stress nephogram of bar with equal section diameter
3.2 驱动器驱动参数计算
由于每个驱动器运动相互独立,因此将其从根部到末端(从左至右)依次编号为1~6,当分析1号驱动器输出力大小时,可将2~6号驱动器及其余部分看作一个整体,受力分析如图17所示。
由图17受力分析可知,驱动器杆1内部有向左的拉力,该力对转轴的力矩与外力及重力6对转轴的力矩相平衡,设四面体底边长为,高为,得到:

(13)
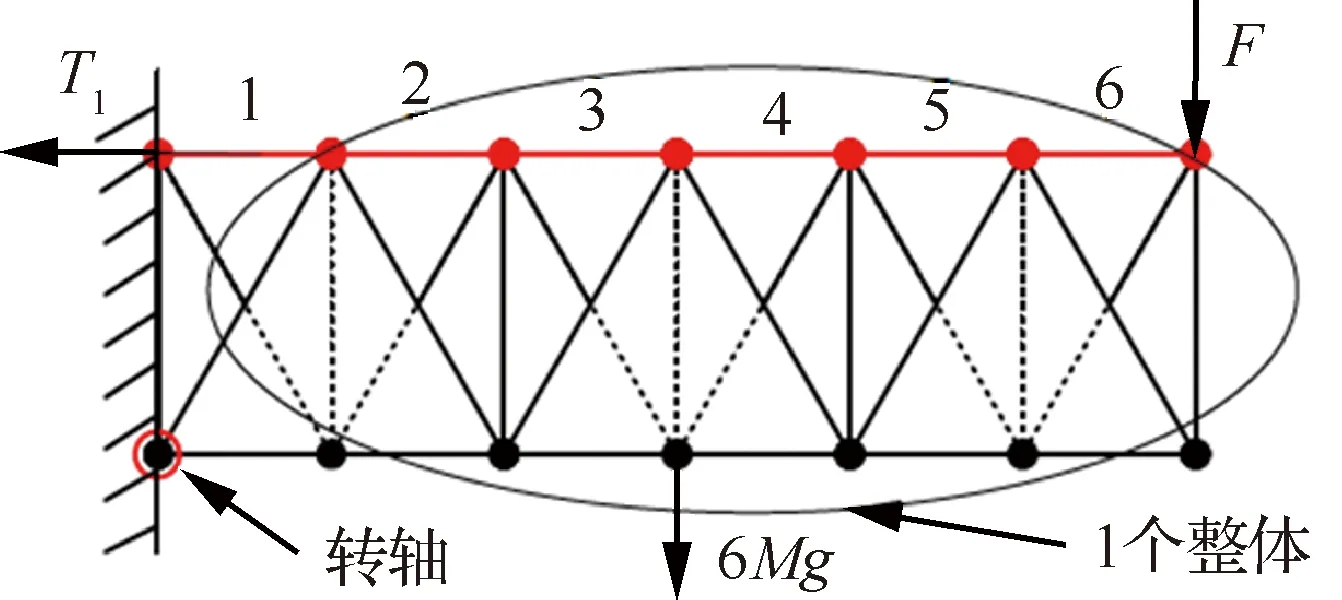
图17 1号驱动器受力分析Fig.17 Force analysis of actuator 1
式中:为驱动器1的驱动参数;为骨架端部受到的气动载荷;为每个四面体的质量。因此,驱动器1应输出的驱动力为

(14)
当分析驱动器2输出力大小时,可将1号驱动器及桁架杆和固定端作为1个整体,3~6号驱动器及相应的四面体桁架单元看作一个整体,因此输出力对转轴的转矩与外力对转轴的转矩平衡,受力分析如图18所示。
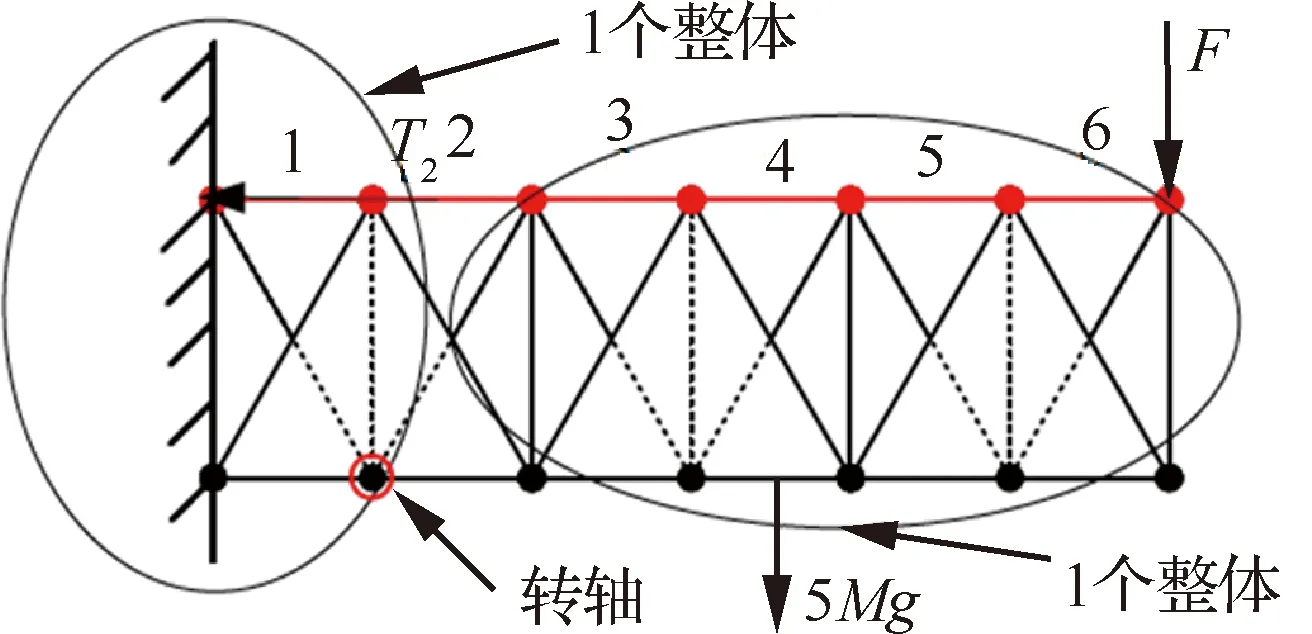
图18 2号驱动器受力分析Fig.18 Force analysis of actuator 2
由力平衡关系可知,有

(15)
式中:为驱动器2的驱动参数。因此驱动器2应输出的驱动力为

(16)
同理,可以获得3~6号驱动器输出力的大小。单个四面体单元的基本质量估算为0.2 kg,端部施加=100 N的力,经过计算,各驱动器输出力如表1所示。

表1 1~6号驱动器驱动力计算公式及结果
4 基于四面体单元变形翼骨架样机研制
4.1 原理样机研制
根据以上设计方案,设计并研制了六单元四面体桁架的变形翼骨架原理样机,四面体单元底边长284 mm,斜边长170 mm;球形接头外环球面直径为25 mm,内环直径为20 mm,环壁厚为5 mm。各杆件的尺寸参数如图19所示。
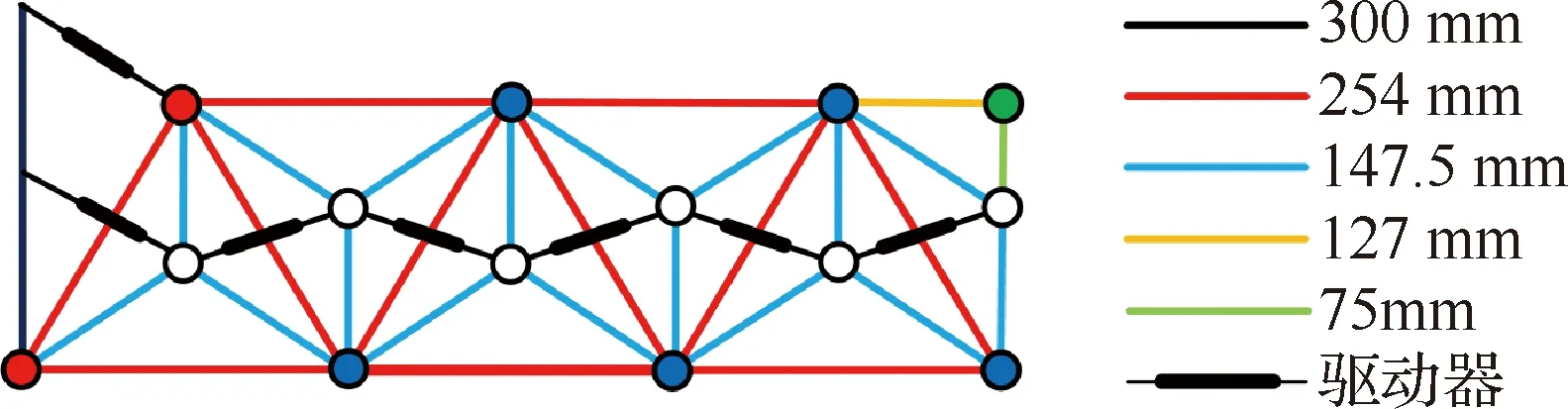
图19 六单元四面体桁架结构示意图Fig.19 Structural diagram of six element tetrahedral truss
考虑到机翼具体形状,以及承载情况,研制了原理样机,实物图如图20所示,由于桁架结构根部与机身固定,因此当其受到外载荷作用时,各部分承载大小不同,为使其受载较为均匀,将该桁架结构中杆件直径由根部向外依次递减。
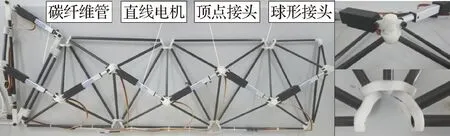
图20 原理样机实物图Fig.20 Physical drawing of principle prototype
4.2 变形功能试验
在给予6个直线位移驱动器(变后掠驱动器保持不动)不同位移量时,该桁架结构能实现展向弯曲,扭转等形态改变:
1) 上弯状态:1~6号驱动器均缩短,上弯角度与每个驱动器缩短量相关。
2) 下弯状态:1~6号驱动器均伸长,下弯角度与每个驱动器伸长量相关。
3) 扭转状态:6个驱动器交替变化,扭转角与每个驱动器变化量相关。
变形翼骨架变形各状态如图21所示。在有效控制驱动器位移量的前提下,能够有效实现变形翼骨架展向弯曲及扭转变形,可通过调整驱动器的位移量控制骨架变形程度。

图21 样机各变形状态Fig.21 Deformation state of prototype
5 结 论
1) 基于三角板串联机构,设计了四面体单元及复合球形接头,通过线性阵列得到了刚度和稳定性增强的桁架式变形翼骨架。基于力学和稳定性条件,对四面体单元及复合球形接头进行了参数化分析与优化设计。
2) 基于D-H坐标变换法,求得了6个输入角在-30°~30°之间变化时,变形翼骨架最末端点的运动空间,并采用运动影响系数法对求解结果进行了验证。
3) 分析了四面体单元的抗压强度及抗弯强度,利用有限元软件得到了变形翼骨架在载荷作用下的变形和应力分布;推导得到静力作用下的驱动器载荷计算公式,并进行了数值计算。最后研制了变形翼骨架原理样机,并进行了变形功能验证。
