嫦娥五号表取采样臂载相机成像位姿与覆盖
2022-09-05郑燕红邓湘金金晟毅陈丽平姚猛赵志晖
郑燕红,邓湘金,金晟毅,陈丽平,姚猛,赵志晖
北京空间飞行器总体设计部,北京 100094
2020年11月24日,中国用长征五号运载火箭成功发射嫦娥五号月球无人采样返回探测器,经地月转移、近月制动、环月飞行、动力下降等飞行过程,着陆在月球北纬43.1°、西经51.9°的风暴洋西北地区,在约19 h内完成了月面采样封装任务,获取了约1 731 g月球样品,并获得了大量的月面采样邻近区域图像数据,可为嫦娥五号着陆点科学分析提供支持。
嫦娥五号探测器的着陆位置远离以往的人类月球探测器,实施钻取、表取采样活动,通过表面成像可获取采样邻近区最直观的信息。表取采样机械臂上臂杆和末端各配置了一台小型相机,支持表取采样与探测工作,增强人类对月球风暴洋东北地区的认知。臂载相机与器表安装的成像设备不同,其受活动范围、拍摄视角的约束较小,随机械臂运动过程中,可在更大的范围、更多的视角方位进行图像获取,可降低图像信息缺失。美国好奇号、毅力号火星车机械臂末端均安装了成像仪,对火星岩石和火壤进行近距离观测,凤凰号、洞察号着陆器机械臂臂杆上安装了臂载相机,对器上设备状态或邻近区域环境等进行了成像探测。俄罗斯火卫一探测器采样机械臂上也安装了成像仪,拟辅助完成采样过程。欧空局小猎犬2号火星着陆器机械臂末端携带了2台轻小型相机,拟对岩石表面纹理进行观测。由于机械臂携带的臂载相机可在较大的范围内运动并获取图像,目前主要的方法集中在利用图像特征进行匹配与处理方面,联合臂载相机动态位姿信息的应用还相对较少。
本文利用几何方法描述了四自由度月球表取采样机械臂的逆运动学,提出了单目运动相机成像位姿确定方法,进行了成像覆盖区域分析,建立了臂载相机多幅图像间的非图像化交叠评估原则,结合嫦娥五号任务实施情况,进行了仿真分析,并通过地形重建对结果进行了验证。
1 采样邻近区成像情况
嫦娥五号探测器由轨道器、着陆器、上升器和返回器组成,根据飞行过程中舱段组合,着陆器与上升器构成着上组合体,轨道器与返回器构成轨返组合体。月面工作过程中,着上组合体着陆月球表面,利用安装在着陆器外侧的监视相机A、B及全景相机获取表取采样区图像,月面表取采样过程中,安装在机械臂臂杆上的远摄相机、末端的近摄相机,择机开机对特定区域和关键过程进行成像,如图1所示。
利用监视相机A、B或全景相机图像,通过图像校正与立体匹配,可获得高精度的表取采样区三维数字地形,但由于月面岩块、凹坑等遮挡影响,可能无法获取完整的地形数据。嫦娥五号月面表取采样机械臂臂展长度约3.7 m,具有肩偏航、肩俯仰、肘俯仰、腕俯仰4个自由度,远摄相机、近摄相机均为单目相机,通过机械臂的运动可按一定的重叠度对月面进行近距离、多视角成像,增大观测区域,结合各图像之间的联系,可获取更为全面的采样邻近区信息。

图1 着上组合体成像观测示意Fig.1 Imaging sketch of lander and ascender
2 机械臂逆运动学
由于臂载相机图像获取过程与表取采样机械臂的运动密切相关,因此,建立多幅图像的联系需先分析机械臂的逆运动学关系。
为统一分析基准,以如图1所示坐标系为参考系,其原点位于着陆器顶面,+轴垂直于该顶面,+方向平行于监视相机安装侧面并指向全景相机方向,+轴与+、+轴构成右手系。设表取采样机械臂的4个关节转动角度分别为、、、(转动正方向如图2、图3中各转角标记的箭头方向),机械臂连杆1、2长度分别为、,对应关节偏置记为、、、。为方便讨论,将各个转角的取值范围限定在-180°~+180°。
设表取采样机械臂在工作过程中,目标点坐标为(,,),采样器与平面夹角为。沿参考系-向俯视,由于关节1、2 (J)正、反联动的差异,机械臂腕心运动至目标点的构型向平面投影存在如图2所示的2种状态。

(1)
图2 机械臂向OXY平面投影示意Fig.2 OXY plane projection sketch of manipulator
由图2中2种状态的角度关系易知,关节1角度为
(2)

图3 机械臂沿伸展方位竖直平面投影示意Fig.3 Upright plane projection sketch of manipulator

(3)

(4)
设=+cos,=sin,则有

(5)
由于机械臂处于某一构型时,总是构成封闭的三角形,记其中两角之和为,则有

(6)
(7)
根据采样器在参考系中的姿态角,可得关节4转角为
=--
(8)
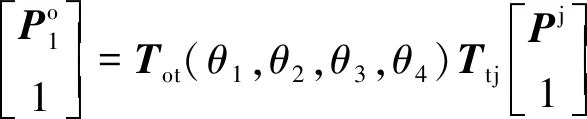
从而,由式(2)、式(4)、式(5)与式(8),可计算得到表取采样机械臂对应空间目标位姿的4组关节转角,结合表取采样任务需求,可选定其中1组作为任务实施角度。
3 成像位姿确定方法
根据前面的机械臂逆运动学关系,可建立机械臂腕心处位姿变化在参考系中的表示。为获取远、近摄相机各图像拍摄的视角、距离等信息,建立图像间的联系,需结合机械臂运动情况,进一步确定臂载相机位姿变化在参考系中的表示。
如图4所示,设远摄相机坐标系为,近摄相机坐标系为,原点、分别为远、近摄相机的光心,、轴均沿相机光轴方向指向前方,与、与分别与其图像的横轴与纵轴平行。由于远摄相机与机械臂臂杆存在一定夹角,为便于分析,在腕心处引入过渡坐标系,+轴沿连杆2方向,指向触月圆盘,+轴垂直于连杆2方向,+轴与其构成右手系。
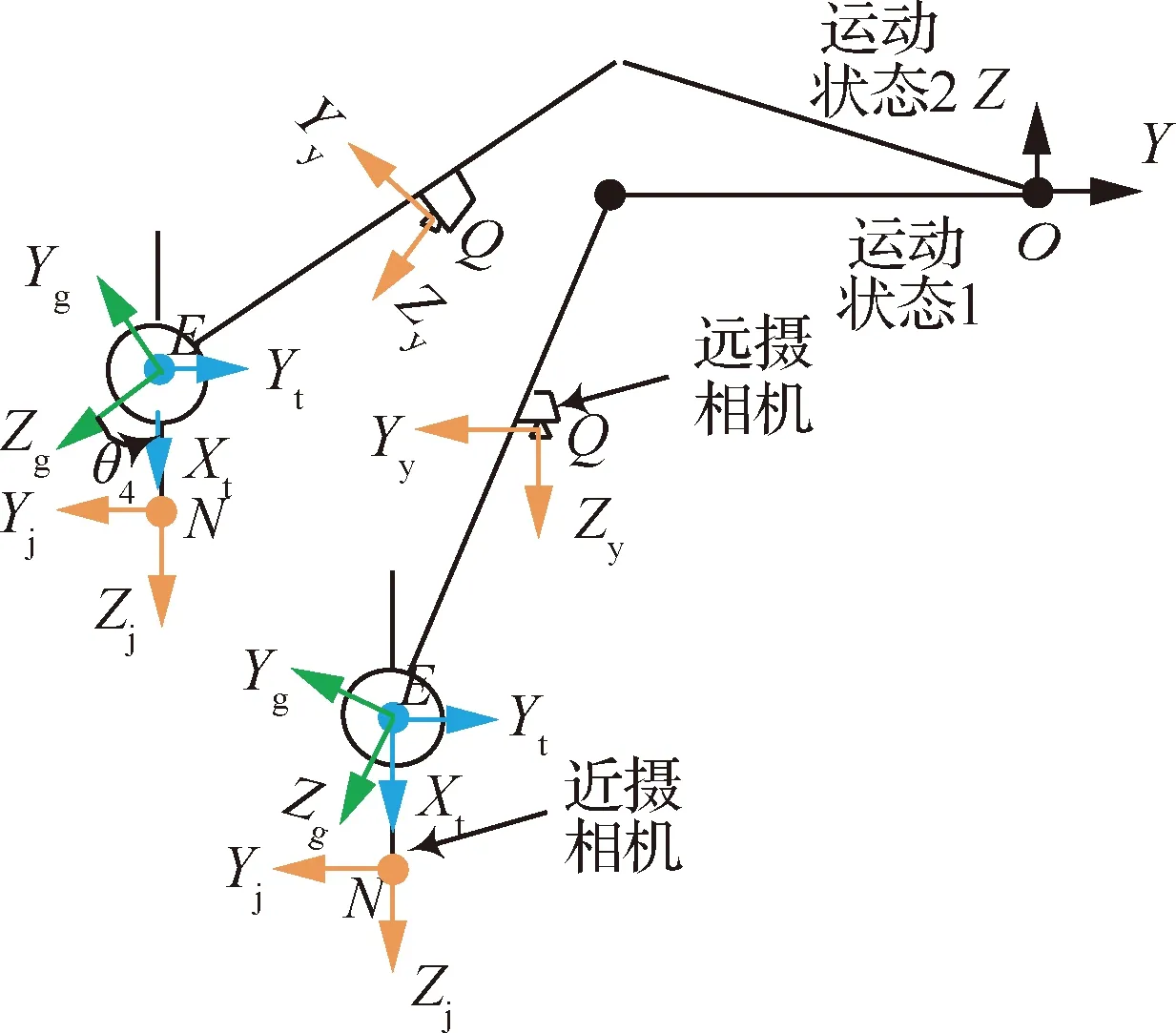
图4 远、近摄相机坐标系与参考系相对关系Fig.4 Relationship between far or near cameras and reference frames

(9)


(10)
式中:∈为腕心过渡坐标系到腕心坐标系的变换矩阵,由图4可知,其仅依赖于机械臂关节4转动角度,可表示为
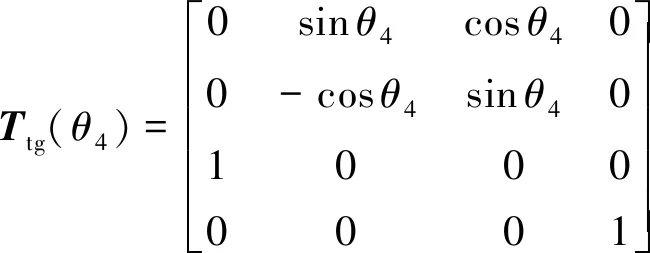


(11)

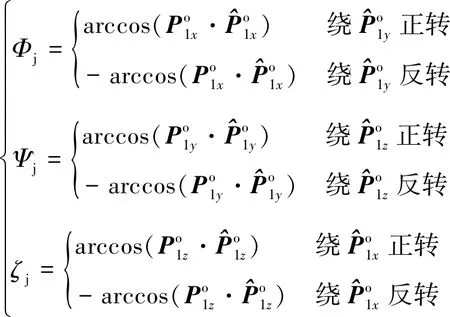
(12)
其中正、反转按右手定则确定。远摄相机可按同样的方式进行姿态角、、定义。

4 视场覆盖分析
臂载相机要对采样邻近区域进行成像,需保证在一定的成像位姿下,月面场景能进入相机的视场范围内,通过覆盖区域分析提升可视化遥测信息,可确定多幅图像之间的联系情况。设臂载相机为方形视场,为分析视场覆盖情况,过相机坐标系原点虚拟构造形如图5(a)所示的方形区域(,, …,点位可根据实际情况选择,此处为中点),由于远摄、近摄相机随机械臂运动,相机的光轴可能指向天空方向,在这种情况下,远摄或近摄相机无法拍摄到月面场景,而当相机光轴下探角度小于半视场角时,月面场景也无法进入相机的上半部分视场中,保守选取局部半视场形成如图5(b)的覆盖区域,当机械臂关节转动使相机视场上下翻转180°时,与之类似。根据第2节描述的机械臂形式不存在沿参考系轴转动的自由度,因此不存在左右翻转的情况。当相机光轴下探角度大于半视场角时,全视场均为有效区域,形成如图5(b)的覆盖区域。
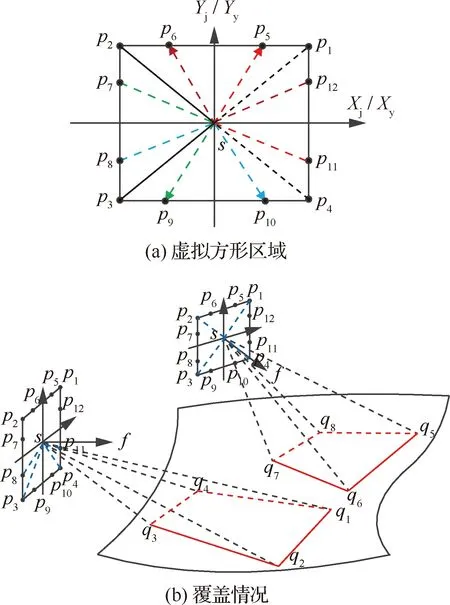
图5 远摄或近摄相机覆盖示意图Fig.5 Coverage sketch of far or near cameras
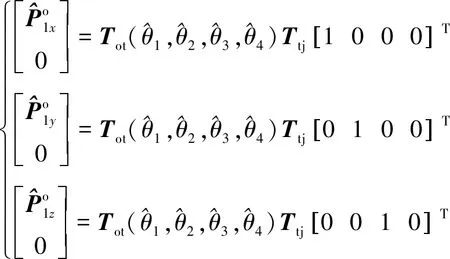
远摄、近摄相机视场覆盖分析主要是在给定的成像位姿下,计算地形平面上或的角点坐标。远摄相机、近摄相机可根据器表立体相机(如监视相机A、B)获得的区域地形作为表取采样邻近区域的视场覆盖分析的先验信息,拟合表取采样区域坡面。设拟合的采样区坡面法向量为,远摄或近摄相机成像时,相机坐标系到参考系的转换矩阵分别为、,根据前面的分析,即=,=。设相机半视场角为(远摄、近摄可选择不同的值),根据图5(a)可知,相机光轴下探角度大于半视场角时,结合方形区域,转动相机光轴方向矢量,可获得视场覆盖的边缘线方向矢量~,即
(13)
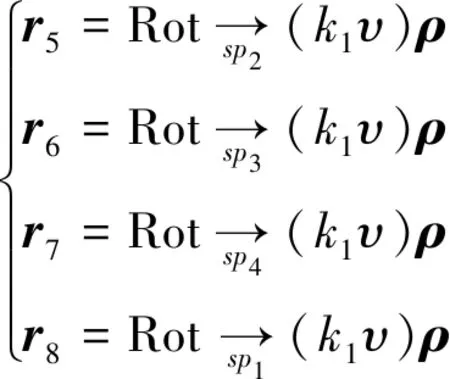
式中:Rot(·)表示以下标向量为转轴的旋转变换函数。相机光轴下探角度小于半视场角,且不指向天空时,图5(b)中的覆盖区域可结合矩形区域,转动光轴方向矢量生成,可得一组视场覆盖边缘线方向矢量~,即

(14)
式中:、为依赖半视场角的固定系数。同理,当机械臂运动引起视场上下翻转时,可利用矩形区域替代方形区域,转动光轴方向矢量生成。
设为覆盖边缘线从相机系原点到地形平面上的交点(=1,2,…,8)的长度,则对远摄或近摄相机,交点坐标可描述为
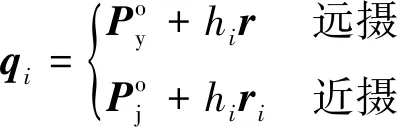
(15)


或
(16)
则在多幅图像中,第幅图像与其他图像存在交叠区域。式中:=1或5;为第幅图像覆盖区角点距其他图像覆盖区角点的距离。由于覆盖区随距离的增加而扩张,对存在一定交叠区的覆盖情景,处于地形拟合平面下方(远离相机)凹陷的点或区域不会跳出视场,但拟合平面上方(靠近相机)凸起的点或区域,却存在跳出的可能,因此需通过调整式(16)中取值,加大交叠区域,确保凸起部位均处于视场覆盖中。从上可见,不依赖图像,仅利用成像位姿与视场覆盖可对多图像的交叠情况进行评估。
5 仿真与验证情况
为验证臂载相机成像位姿与视场覆盖方法的正确性,利用2020年12月1日嫦娥五号监视相机A、B拍摄的区域图像,如图6所示,获取远、近摄相机拍摄的采样邻近区坡面先验信息。
监视相机A、B图像经灰度处理后,利用校准的内、外参数进行地形重建,获得参考系下局部地形如图7所示。

图6 监视相机A、B图像Fig.6 Images acquired by monitoring camera A and B

图7 监视相机图像三维重建地形示意Fig.7 Reconstructed terrain of monitor-camera images
经分析,该区域斜向最大长度约4.6 m,垂直该方向的最大长度约2.6 m,法向量=[-0.022 85, 0.014 15, 0.999 6],坡度约1.5°,将图7与第一次采样时机械臂与月面接触点的遥测地形点坐标比对,偏差优于8 mm。选取=10 mm,利用近摄相机拍摄的3 298幅、远摄相机拍摄的4 152幅采样邻近区图像,根据式(16)选取近摄250幅、远摄344幅,结合前述位姿确定方法,可仿真计算各图像的成像位姿表示如图8所示。
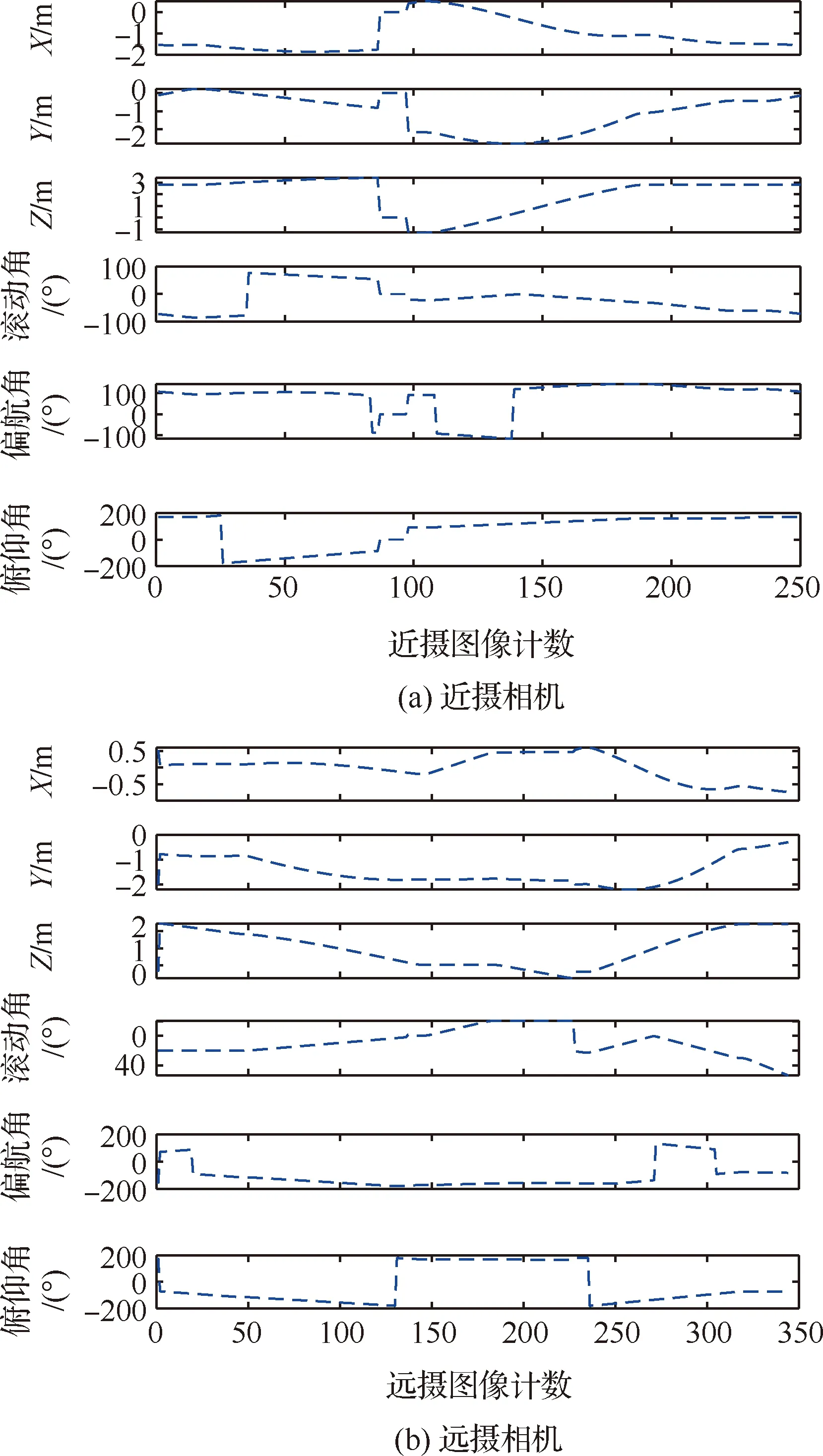
图8 远、近摄相机成像位姿变化示意Fig.8 Position and attitude curves of far/near camera
根据远、近摄相机图像位姿表示,结合监视相机A、B提供的坡面法向量信息,可得远、近摄相机在拟合坡面的视场覆盖如图9所示。成像位姿与视场覆盖仿真过程采用主频为3.4 GHz的多核处理器进行计算,近摄、远摄相机成像位姿确定的单幅平均时间分别约6.4 ms、7.3 ms,视场覆盖单幅平均时间分别约8.2 ms、8.4 ms。视场覆盖分析计算的耗时相当,但远摄相机需按式(10)进行一次转换计算,相对近摄相机成像位姿确定的耗时则更多一些。
将远、近摄相机在该区域获得的多幅图像,结合图像匹配与成像位姿信息,进行地形重建,可得该区域地形如图10所示,其中近摄多图像重建地形斜向长度约14.5 m,其垂直方向的最大宽度约6.6 m,远摄多图像重建地形上下长度约12.2 m,横向最大宽度约6 m,其尺度与图9覆盖区域情况相当,重建地形在边缘部位由于匹配点较少,存在一定的削边效应,对比图9与图10可见,重建地形的方位、形态与仿真分析的覆盖区域具有较好的相似性。
将图10所示远、近摄相机重建地形与图7所示监视相机A、B 重建地形的重叠区域进行校准比对,可得近摄多图像重建地形均值偏差为2.85 cm,远摄多图像重建地形均值偏差为2.31 cm,具体偏差分布如图11所示。总体来看,臂载相机结合成像位姿与图像特征对多图像地形重建的精度约3 cm,其精度略低于监视相机A、B所得结果,位于机械臂臂杆中部的远摄相机多图像重建精度略优于位于末端的近摄相机,但远、近摄相机重建区域面积分别约95.7 m、73.2 m,远大于监视相机A、B约12 m区域,可以获得更为丰富的采样邻近区信息。

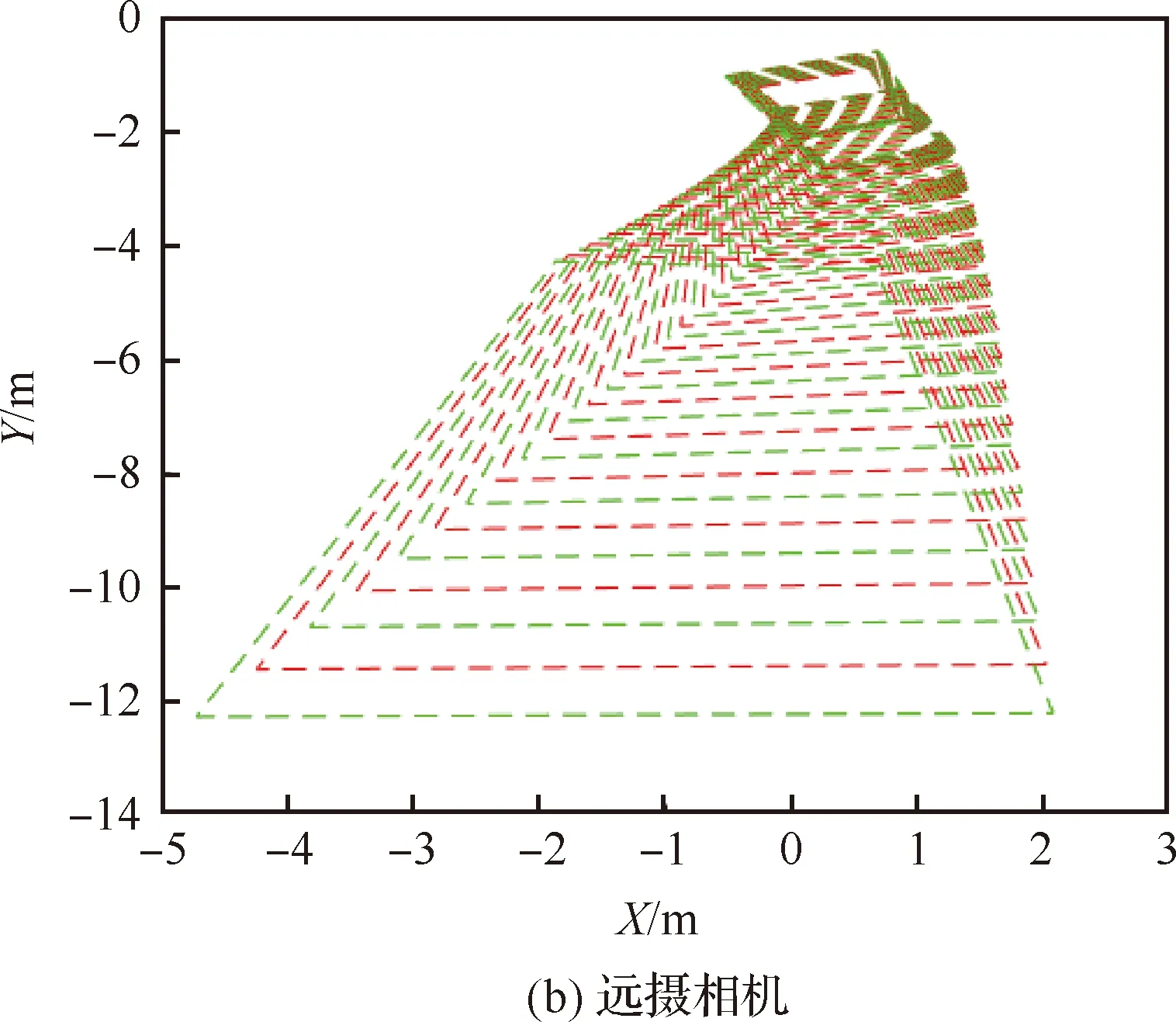
图9 远、近摄相机月面覆盖区域仿真Fig.9 Coverage simulation of far/near camera

图10 含位姿信息的远、近摄图像地形重建Fig.10 Reconstructed terrain of far/near camera images with position and attitude
为分析成像位姿信息的影响,利用远、近摄相机含成像位姿信息重建时的相机参数及图像匹配方法,在无成像位姿信息状态下进行地形重建,并与图10的结果进行比对,如图12所示。
从图12中可见,成像位姿信息对重建地形的形态影响较小,通过图像特征匹配可获得较好的地形形态,但在缺失成像位姿信息状态下的地形尺度,相较于真实状态均发生了严重失真,从近摄相机的地形对比还可以发现地形的方位也存在明显的偏转,这表明在多图像联合处理过程中,尤其是在涉及三维信息应用场景,成像位姿信息具有重要作用。
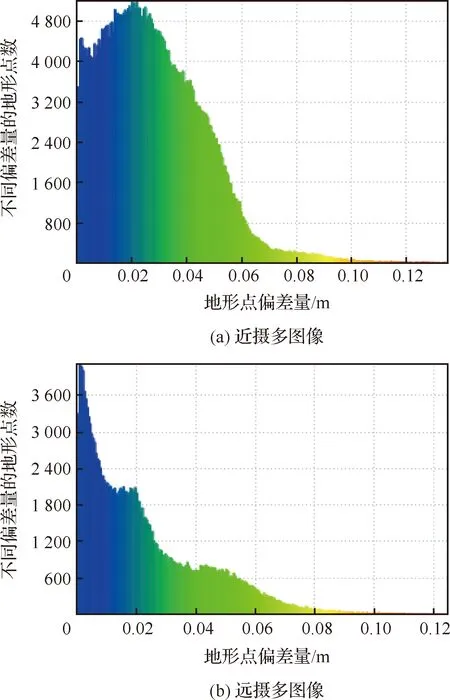
图11 远、近摄多图像重建地形偏差分布Fig.11 Error distribution of reconstructed terrain with multi-images acquired by far/near camera


图12 远、近摄图像有/无位姿信息地形重建对比Fig.12 Comparison of reconstructed terrain using far/near Camera images with and without position and attitude information
6 结 论
嫦娥五号探测器通过表取采样臂载相机获取了采样邻近区域丰富的场景图像,为着陆点科学分析提供直观探测数据。
本文分析了嫦娥五号月面采样邻近区成像情况,以几何图示方法分析了月面表取采样机械臂逆运动学,确定了运动过程中臂载相机成像位姿,以成像区域覆盖关系反映了多图像的交叠情况。结合嫦娥五号月面工作过程,对远摄、近摄相机成像位姿、区域覆盖情况进行了仿真分析,并通过地形重建进行了验证比对。结果表明该方法可确定臂载相机运动图像间的交叠联系,结合成像位姿,在地形重建等多图像应用中可获得更大范围、更高精度的科学数据。
