无轴承永磁同步电机电磁特性仿真研究
2022-08-31孙丽兵王金玉李肖艳
孙丽兵,王金玉,李肖艳
(1.上海电子信息职业技术学院 机械与能源工程学院,上海 201411;2.上海电机系统节能工程技术研究中心有限公司,上海 200063;3.上海船舶工艺研究所,上海 200030)
0 引 言
与传统异步及电励磁同步电机相比,永磁同步电机具有功率密度大、体积小、质量轻、效率高、结构简单且无励磁绕组等优良特性,在现代工业生产中应用越来越广泛[1-2]。无轴承永磁同步电机(BPMSM)在保留传统永磁同步电机(PMSM)优势的基础上集成了磁轴承的优点,集成电机转子的旋转与悬浮功能于一体,具有无需润滑、无机械噪声、无磨损及运行高速等特性,从而解决长期以来永磁同步电机高速运行受轴承技术制约的问题,在高速高精设备、精密数控机床、航空航天、飞轮惯性储能、离心压缩机、医疗器械等高科技领域有广泛的应用前景。
文献[3-5]从运行原理出发,建立了考虑定、转子定位偏心的感应型无轴承电机磁悬浮力的较精确解析模型,解析模型充分考虑了转子偏心以及两套绕组的耦合关系,揭示了转子偏心、转矩绕组磁场对悬浮力控制及悬浮绕组磁场对转矩控制的耦合影响,有效描述电机产生的径向悬浮力和电磁转矩,并基于电磁场仿真分析进行了验证。文献[6-8]在分析无轴承永磁同步电机电磁转矩和径向电磁力产生机理的基础上,进一步研究了径向力、转矩绕组磁场和悬浮绕组磁场的相对运动关系,分析了电机在不同极对数下转子的涡流损耗特性,并对电机展开相应的有限元仿真分析。文献[9-13]针对无轴承永磁同步电机的控制策略及调制策略展开研究,分析了无位置传感器转子同步角度估算方法,实现了电磁转矩与磁悬浮力的有效解耦控制。针对传统无轴承永磁同步电机内部两套绕组结构复杂、可靠性低等缺点,文献[14]提出了一种新型双三相绕组结构的无轴承永磁同步电机,电机采用两组单元空间上相差180°的独立三相绕组,并通过两个三相逆变器在两个绕组单元中同时通入两组不同序列的电流实现电机的无轴承运行,建立有限元模型分析了径向悬浮力与悬浮电流、电磁转矩与转矩电流、偏心磁拉力与转子偏移量之间关系的变化曲线。
本文基于这种新型的无轴承永磁同步电机,分析电机转子旋转过程中受到洛伦兹力与麦克斯韦力两种不同电磁力的共同作用特性,然后针对施加的牵引力及悬浮力电流进行参数化扫描,并分析转子偏心条件下牵引力及悬浮力共同作用时电磁转矩与悬浮力的特性,最后通过Maxwell有限元仿真软件进行相应仿真,仿真结果验证了理论分析的正确性。
1 无轴承永磁同步电机运行原理
无轴承永磁同步电机转子的悬浮力依赖于定子绕组产生两种不同极对数的旋转磁场,分别提供电磁转矩及悬浮力。在传统的无轴承电机中,采用两套定子绕组来实现两种极对数不同的磁场,分别为转矩绕组和悬浮绕组,通过改变悬浮绕组中电流的大小,来改变原本均匀分布的磁场,产生径向悬浮力,使转子克服重力和由于偏移所受的磁拉力,实现转子的稳定悬浮。
电机在运行时,电机转子实际将受到洛伦兹力与麦克斯韦力两种不同电磁力的作用。在BPMSM中,气隙磁场是由两套绕组以及永磁体产生的磁场共同组成的。永磁体和转矩绕组气隙磁场极对数相同,因此,可以将两种磁场合成为等效转矩绕组气隙磁场。两套绕组在不同磁场的作用下会分别产生径向洛伦兹力和切向洛伦兹力。转矩绕组在合成等效转矩绕组气隙磁场下会受到切向洛伦兹力,用于驱动电机旋转运行,悬浮力绕组在气隙磁场下会受到径向洛伦兹力,为转子提供径向悬浮力驱动电机悬浮运行。
麦克斯韦力是指转子铁心和空气边界处产生的垂直于转子表面的磁张力。在 BPMSM中,麦克斯韦力可以分为可控麦克斯韦力和不可控单边磁拉力。假设 BPMSM 磁通密度为B,真空磁导率为μ0,则单位面积dS上的麦克斯韦力dFm可以表示为
(1)
当BPMSM的定、转子同轴且转子不偏心时,在空间产生平衡的气隙磁场,此时转子表面受到的麦克斯韦合力将为0。若向悬浮力绕组施加相应电流激励,原有平衡气隙磁场被悬浮力气隙磁场所打破,从而产生沿磁场增强方向上的可控麦克斯韦力。当 BPMSM 转子存在偏心时,转子表面的麦克斯韦合力不再为0,从而产生一种沿转子偏心方向的不可控单边磁拉力。目前空间上相差180°的六相绕组无轴承永磁同步电机通过施加不同的电流激励来实现转矩绕组和悬浮绕组独立运行的相同功能,运行原理类似于此。
2 无轴承永磁同步电机绕组空间分布及激励
无轴承永磁同步电机结构二维平面图如图1所示,由于电机采用两组单元空间上相差180°的独立三相绕组,电机共6相绕组,每相绕组占4个槽,电机总槽数是24。电机转子采用1对极表面粘贴式永磁体结构,永磁体充磁方向为平行充磁,电机主要参数如表1所示。
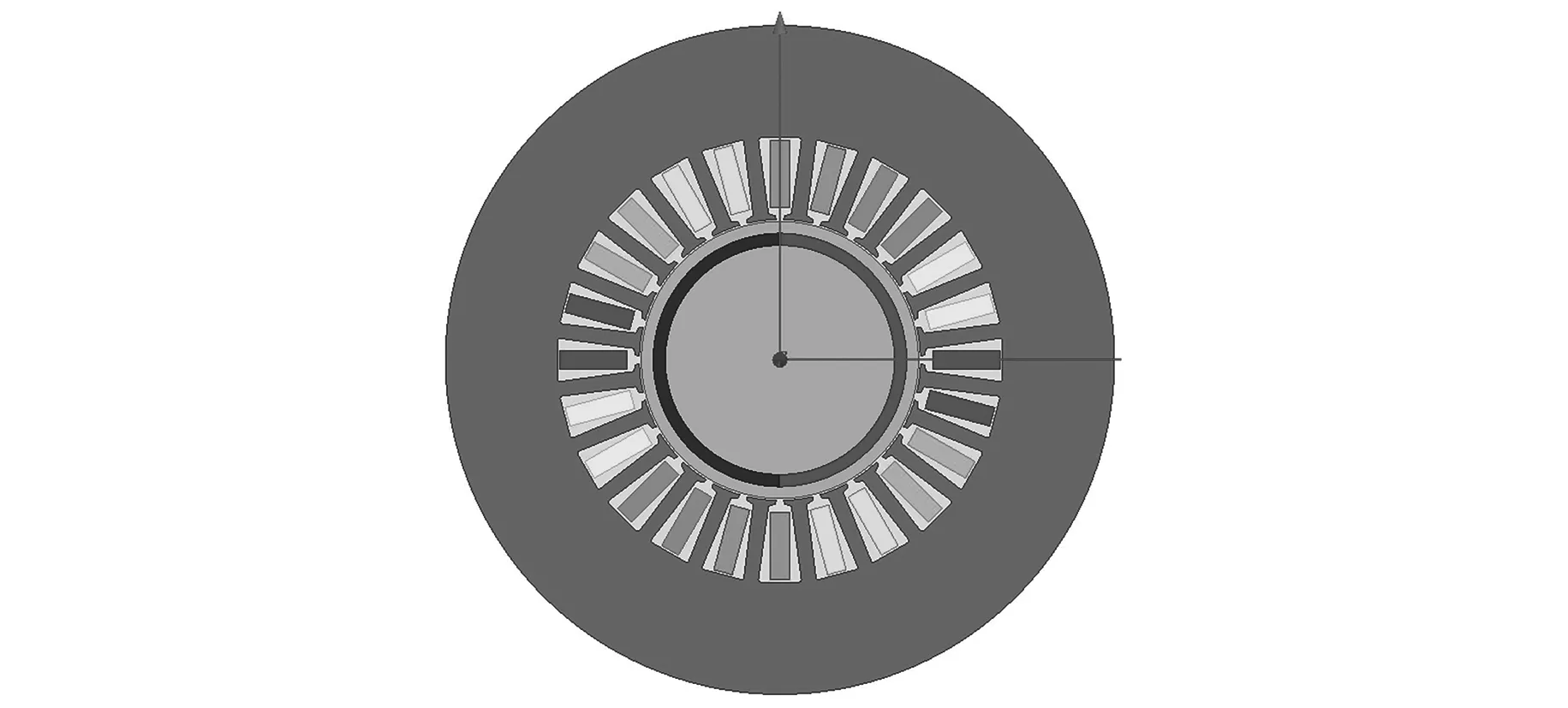
图1 无轴承永磁同步电机二维平面图

表1 电机主要参数
电机6相绕组分别为A、B、C与U、V、W两套三相对称绕组,下面以两套绕组其中一相来进行原理说明,如图2所示为A相与U相绕组空间分布。当A相与U相绕组施加相反的电流时,定子绕组激励在空间产生1对极旋转磁场,与转子永磁体共同作用将产生牵引电磁转矩;当A相与U相绕组施加相同的电流时,定子绕组激励在空间产生2对极旋转磁场,与转子永磁体共同作用将产生径向悬浮力。

图2 A相与U相绕组分布
在6相绕组中将同时施加牵引转矩和悬浮力的电流激励。对应产生悬浮力的绕组电流施加的激励表达式如下:

(2)
式中:itA、itB、itC、itU、itV、itW分别为施加在A、B、C、U、V、W相绕组的悬浮绕组电流;Itm为施加悬浮电流的幅值;ω为施加悬浮电流的角频率;φ0为施加悬浮电流的初始角度。
对应产生牵引转矩的绕组电流施加的激励表达式如下:
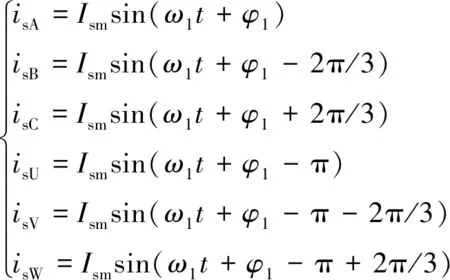
(3)
式中:isA、isB、isC、isU、isV、isW分别为施加在A、B、C、U、V、W相绕组的转矩绕组电流;Ism为施加转矩电流的幅值;ω1为施加转矩电流的角频率;φ1为施加转矩电流的初始角度。
最终施加的合成电流如下:

(4)
3 无轴承永磁同步电机仿真分析
基于上述无轴承永磁同步电机二维平面图,构建有限元仿真分析模型,针对电机转子永磁体、转矩电流、悬浮电流共同耦合激励下的电磁特性展开研究,并分析在转子偏心时,牵引力、悬浮力所呈现出的特性。
3.1 永磁体单独激励下磁场分布
BPMSM牵引转矩和悬浮力电流激励的幅值同时设置为0,即永磁体单独激励的空间磁场分布如图 3所示,转子旋转的速度为600 r/min。从仿真波形中可以看出,感应的磁链及空载电动势近似马鞍波。

图3 永磁体单独作用的磁场分布图
3.2 施加牵引绕组电流
当牵引绕组电流与永磁体共同作用时,为了提取BPMSM最大牵引转矩对应牵引绕组电流的初始角度,设置初始角度φ1作为参数化扫描,φ1=0°…30°…360°,Ism=10 A。仿真结果如图4所示,包括不同初始角度下的输出牵引转矩、x轴及y轴悬浮力曲线以及牵引转矩随初始角度φ1变化特性曲线。最大牵引转矩对应的初始角度为22.5°,x轴及y轴悬浮力近似为0。

图4 施加牵引绕组电流的输出特性
3.3 施加悬浮绕组电流
当悬浮绕组电流与永磁体共同作用时,为了提取BPMSM最大牵引转矩对应悬浮绕组电流的初始角度,设置初始角度φ0作为参数化扫描,φ0=0°…10°…360°,Itm=10 A。仿真结果如图 5所示,包括不同初始角度下的输出牵引转矩、x轴及y轴悬浮力曲线以及悬浮力随初始角度φ0变化特性曲线。输出牵引转矩近似为0,x轴悬浮力平均值为0,y轴悬浮力最大对应的角度为225°。

图5 施加悬浮绕组电流的输出特性
3.4 共同施加牵引及悬浮绕组电流
通过上面的仿真结果,求取出最大牵引转矩以及y轴悬浮力最大时分别对应的初始角度,从而设置共同施加牵引及悬浮绕组合成电流表达式中Ism=10 A、Itm=10 A,φ1=22.5°、φ0=225°,ω=62.8 rad/s、ω1=62.3 rad/s。6相绕组瞬时波形如图6(a)所示,输出牵引转矩、x轴及y轴悬浮力波形如图6(b)~图6(d)所示。
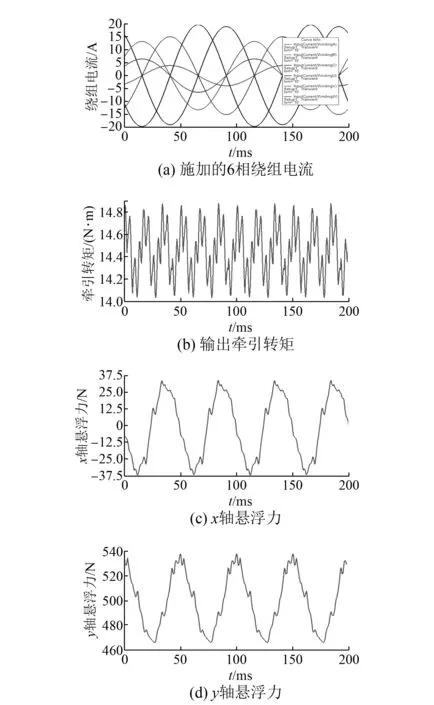
图6 施加牵引及悬浮绕组电流的输出特性
3.5 x、y轴方向偏心距离参数扫描
BPMSM在实际控制过程中必然存在x、y轴方向动态偏心问题。为了分析x、y轴方向不同偏心距离下电机牵引转矩、x轴及y轴悬浮力特性曲线,需要针对偏心问题展开相应的仿真研究,从而实现对偏心问题带来的悬浮力偏移的动态补偿,使电机可以稳定闭环运行。图 7是x轴方向不偏心、y轴方向偏心1 mm时施加牵引及悬浮绕组电流对应的牵引转矩、x轴及y轴悬浮力仿真波形。其中x轴及y轴悬浮力仿真波形是基于电机单位长度1 m的结果,实际值需要折算成0.116 m电机轴向长度,即乘以系数0.116即可。与图 6相比,y轴方向偏心后会造成y轴方向的单边磁拉力周期平均值增加,以及x轴、y轴方向的动态振幅波动值的增加。

图7 x轴方向不偏心、y轴方向偏心1 mm条件下的仿真结果
图 8是y轴方向不同偏心距离下输出牵引转矩、x轴及y轴悬浮力变化曲线。可以看出,y轴方向偏心距离的增加对输出牵引转矩平均值影响较小,对波动范围的影响较小,如图8(a)所示。随着y轴方向偏心距离的增加,y轴方向偏移的单边磁拉力平均值及振幅呈线性增加趋势,如图8(c)、图8(e)所示;x轴方向偏移的单边磁拉力平均值近似为0,振幅呈线性增加趋势,如图8(b)、图8(d)所示。x轴方向偏心距离参数扫描特性与y轴方向相同。从上面的仿真结果可以看出,转子永磁体、牵引及悬浮绕组电流共同耦合激励将产生旋转牵引力、x轴及y轴方向悬浮力,只要针对x、y轴所处的位置所产生的悬浮力进行反向补偿,使电机转子在x、y轴方向的合成作用力为0,就可以保证电机旋转过程中转子在不偏心状态下运行。
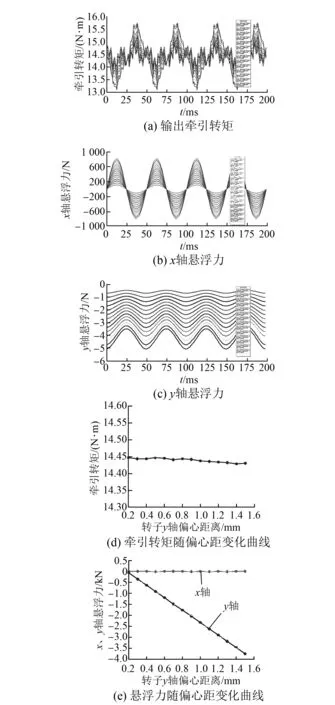
图8 y轴方向偏心距参数扫描仿真结果
4 结 语
本文对无轴承永磁同步电机的运行原理及电磁受力进行了详细分析,介绍了空间上相差180°的6相绕组无轴承永磁同步电机结构与传统无轴承电机的区别及运行原理的特性,并基于有限元仿真模型揭示了转子永磁体、转矩电流、悬浮电流共同耦合激励下的相互影响机理。得到如下结论。
(1)y轴方向偏心后会造成y轴方向的单边磁拉力周期平均值增加,以及x轴、y轴方向的动态振幅波动值的增加。随着y轴方向偏心距离的增加,y轴方向偏移的单边磁拉力平均值及振幅呈线性增加趋势;x轴方向偏移的单边磁拉力平均值近似为0,振幅呈线性增加趋势。
(2) 从文中的仿真结果可以看出,转子永磁体、牵引及悬浮绕组电流共同耦合激励将产生旋转牵引力、x轴及y轴方向悬浮力,只要针对x、y轴所处位置所产生的悬浮力进行反向补偿,使电机转子在x、y轴方向的合成作用力为0,就可以保证电机旋转过程中转子在不偏心状态下运行。
