高效能同步磁阻电机数据驱动型模型预测控制方法*
2022-08-31曹晓冬赵双双
曹晓冬,徐 晴,赵双双,陈 飞,朱 君
(国网江苏省电力有限公司营销服务中心,江苏 南京 210019)
0 引 言
同步磁阻电机(SynRM)具有转矩密度高、高效节能等特点,近年来在地铁、航空等领域应用广泛[1-3]。与此同时,各类高性能驱动方法应运而生,有限状态集模型预测控制(FCS-MPC)[4]便是其中之一。该方法以SynRM时域状态空间模型为基础,结合微分方程泰勒级数展开[5],从而建立SynRM系统离散预测模型。上述过程不可避免地涉及多个SynRM电气参数,如电阻、电感和磁链[6],然而对于实际工程场景,考虑到复杂且恶劣的工作环境,SynRM参数受工作点、环境温度等多因素影响[7-9],离线参数计算或在线参数辨识难度较大[10-12]。
基于此,本文提出一种数据驱动型模型预测控制(DD-MPC)方法,基于系统输入输出数据关系实现“边建模、边控制”,并设计了一种DD-MPC输入输出数据关系的高更新率实现方法,保证系统稳定收敛。基于25 kW样机对DD-MPC控制效果进行测试与分析,与传统FCS-MPC方法相比,该方法保留了FCS-MPC的快速性和灵活性,并可以有效提升系统的稳定性。
1 FCS-MPC电流预测过程
SynRM调速系统预测电流控制的基本思想为:
(1) 基于SynRM离散预测模型完成对各电压矢量所对应的转矩电流、磁链电流进行预测;
(2) 根据调速系统控制目标,构建合理描述控制目标跟踪误差的价值函数J;
(3) 进行在线滚动优化,满足J取值最小的电压矢量,将其作为最优电压矢量选定并输出。
为实现SynRM转矩、磁链高性能跟踪控制,本文设计价值函数J,表达式为

(1)

uz表达式为

(2)
式中:Udc为逆变器直流母线电压。
图1给出了SynRM调速系统电流预测过程,式(1)中给出了描述转矩电流、磁链电流跟踪误差的简化二次型价值函数。可以看出,电流预测精度直接决定了预测电流控制的性能,FCS-MPC与DD-MPC的核心差异也主要在此。为便于推演DD-MPC数据驱动原理,首先对SynRM数学模型进行分析:
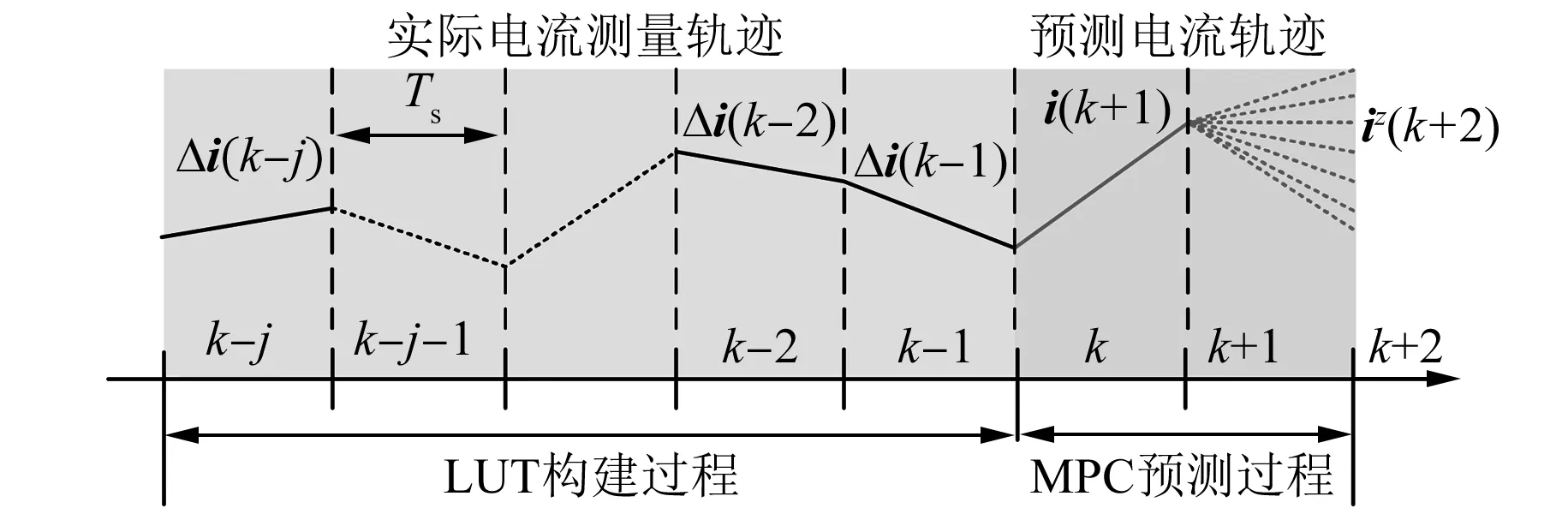
图1 电流预测过程分析

(3)
式中:i为三相电流矢量;ld、lq为d、q轴差模电感;ldq为d、q轴共模电感;ωme为电机机械角速度;Ld、Lq为d、q轴等效电感;u为定子端口电压;R为定子等效电阻。
可以看出,式(3)中SynRM核心参数直接受工作点、环境温度等影响。以磁链参数为例,图2中给出了考虑饱和效应影响的SynRM磁链变化规律,图中In为电机磁饱和额定电流。因此,FCS-MPC为实现高精度电流预测需进行复杂的离线参数计算或在线参数辨识。

图2 考虑饱和效应影响的SynRM磁链变化规律
假设式(3)中SynRM参数精确,根据前向差分原理,可将电压矢量uz对应电流变化量预测值表示为
Δiz(k+1)=Ai(k)+Buz(k)
(4)
式中:参数矩阵A和B可由式(3)推导得出,此处不再赘述。
2 DD-MPC电流预测过程
与基于参数模型的FCS-MPC电流变化量计算过程不同,DD-MPC仅考虑电压矢量对应电流变化量间的输入输出关系,不涉及任何SynRM参数。DD-MPC具体实现过程如下。
(1) 在k控制周期起始时刻,根据电压矢量uk-1作用前后SynRM电流值,求解uz(k-1)对应电流变化量:
Δiz(k)=i(k)-i(k-1)
(5)
式中:i(k)、i(k-1)分别为第k和k-1周期起始时刻电流采样值。
在完成式(5)计算后,分别将对应的d、q轴电流变化量更新至查找表(LUT),同时反复重复上述LUT更新过程,经多个控制周期后,可构建覆盖全部7个电压矢量uz对应电流变化量Δiz的完整LUT。
(2) 根据价值函数J表达式可知,DD-MPC需在每个控制周期完成对7个电压矢量对应的k+1和k+2时刻电流矢量的预测,即:

(6)

进一步分析式(5)中电流变化量Δiz(k)可知,其可被分解为两部分,即
Δiz(k)=δi0(k)+δiz(k)
(7)

考虑到式(5)中电流变化量Δiz(k)由SynRM实际运行采样差值得到,显然当SynRM运行于不同工作点时,各电压矢量uz对应的电流变化量Δiz存在差异,图3中定性地给出了SynRM处于不同转子位置时uz和Δiz矢量关系图,其中图3(a)为θme=0、图3(b)为θme=π/3。可以看出,不同转子位置下有效电压矢量所对应的δiz整体呈椭圆变化趋势,但矢量幅值和方向均有所差异,即δiz=f(i,z,θme)。同理,零矢量对应电流变化量自然增长量满足δi0=f(i,ωme)。

图3 不同转子位置时电流变化量矢量关系
3 LUT高更新率实现方法
前文介绍了DD-MPC电流预测过程,其预测精度与电流变化量更新频率密切相关,但实际系统运行时,不可避免地会出现某个电压矢量多个控制周期未被选中,引起LUT更新“停滞效应”。为此,下文设计了一种DD-MPC输入输出数据关系的高更新率实现方法,利用最近输出的三电压矢量对应电流变化信息,推演并更新全局电压矢量对应电流变化关系。具体包含两部分:(1)电压三矢量识别;(2)电流变化量重建。
图4中给出了DD-MPC查找表高更新率执行流程,下文将对上述两部分逐一展开介绍。
3.1 电压三矢量识别
从图4执行流程中可以看出,在完成k-1控制周期电压矢量对应电流变化量Δiz(k)计算的基础上,所提方法并非直接将其更新至LUT中,而是通过选取最近的三矢量,旨在推演出全部电压矢量对应电流变化量信息,从而实现LUT全局更新。
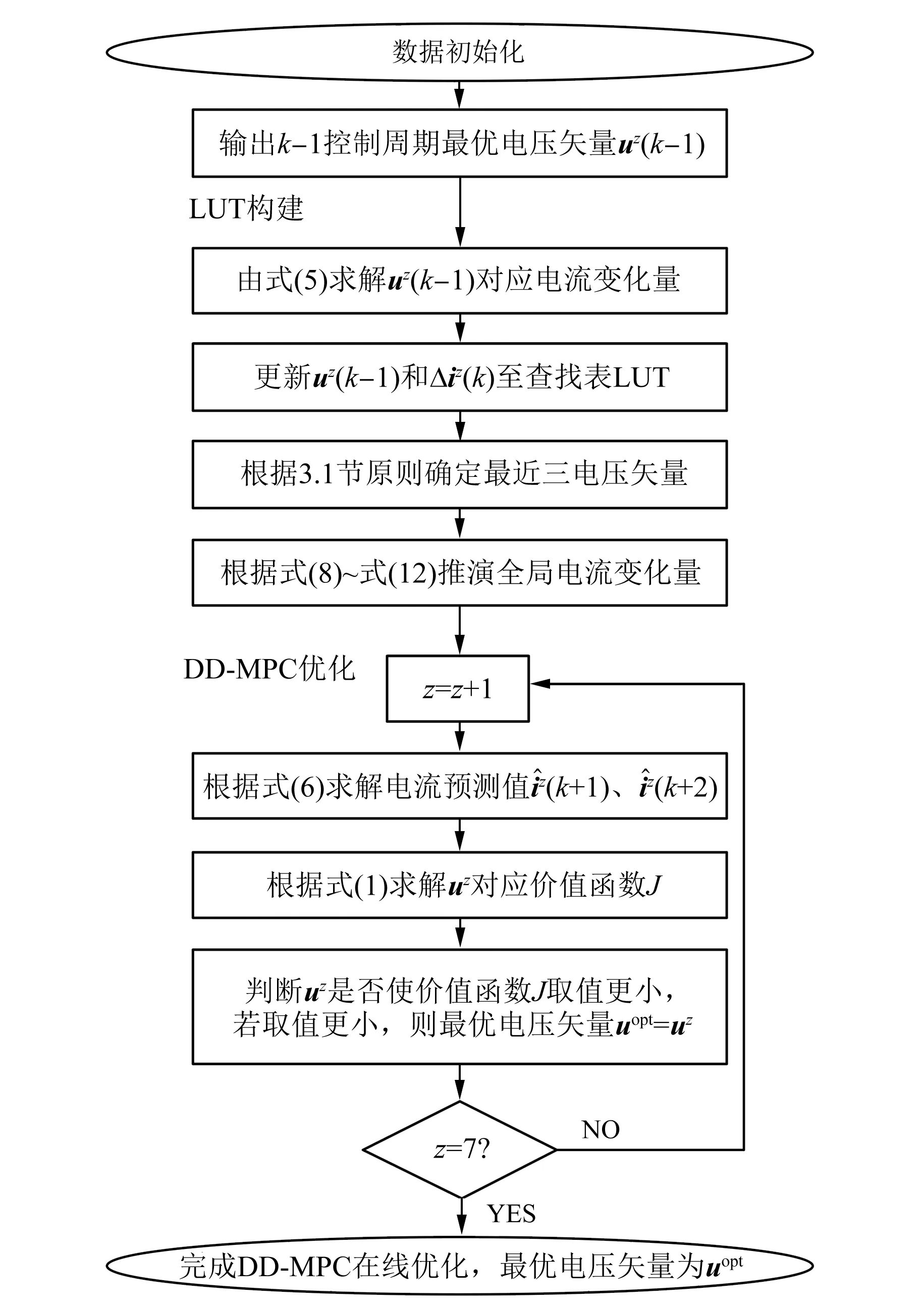
图4 DD-MPC查找表高更新率实现流程
3.2 电流变化量重建
假定最近一次更新的电压矢量uz(t1)中z=1,其最近三电压矢量序列组合关系如图5所示,分为以下5种典型方式。
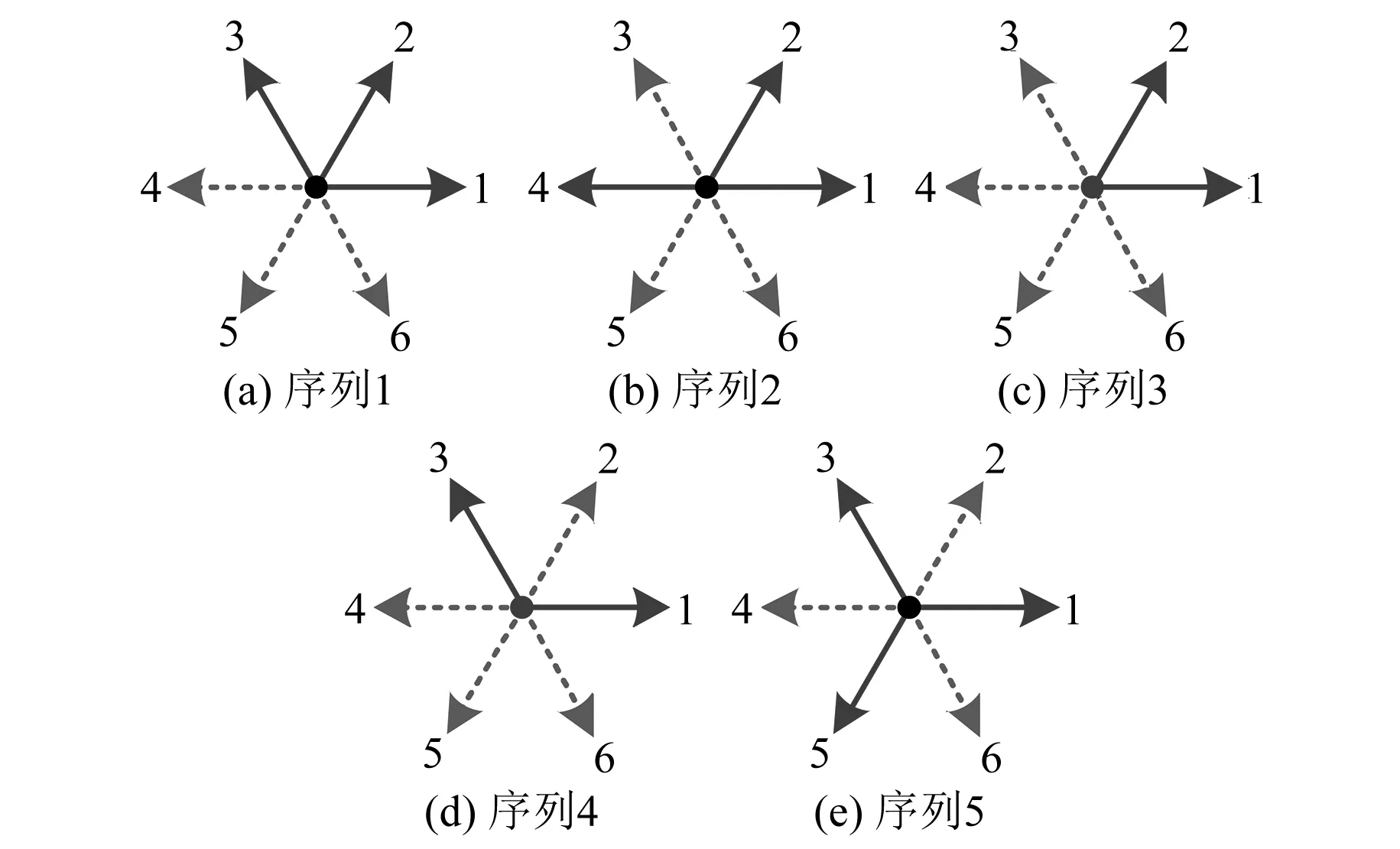
图5 最近三电压矢量序列组合关系
(1) 三个连续的有效电压矢量,如图5(a),对应电流变化关系为

(8)
(2) 三个有效电压矢量,其中两个反向,如图5(b),对应电流变化关系为

(9)
(3) 两个连续的有效电压矢量,一个零电压矢量,如图5(c),对应电流变化关系为

(10)
(4) 两个非连续的有效电压矢量,一个零电压矢量,如图5(d),对应电流变化关系为

(11)
(5) 三个非连续的有效电压矢量,如图5(e),对应电流变化关系为
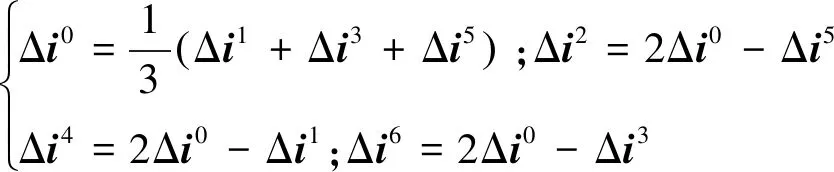
(12)
至此,式(8)~式(12)可完成全局电流变化量计算,从而提高全局电流变化量更新频率。此外,当最近一次更新的电压矢量uz(t1),z=2~6时,计算原理与z=1类似,此处不再赘述。
4 试验验证与分析
图6给出了DD-MPC软硬件系统架构。图6(a)为控制软件框图,包含转速外环、MTPA运算单元以及DD-MPC,其中DD-MPC在k时刻电流采样值基础上,逐一完成三矢量序列识别、变化量重建以及LUT更新,进而实现k+1和k+2时刻电流预测。图6(b)为测试平台硬件,参数为,电机极对数4,定子电阻5.2 Ω,d轴等效电感1.2 mH,q轴等效电感0.4 mH,额定电压380 V,额定电流25 A。

图6 DD-MPC软硬件系统架构
首先,进行DD-MPC稳态运行效果测试。图7给出了FCS-MPC与DD-MPC稳态电流控制效果对比结果,其中0.04 s时刻SynRM调速系统电流预测过程由“参数模型”切换为“数据驱动模型”。FCS-MPC受限于参数失配问题,稳态电流正弦度尚可,但存在较大纹波,而此时DD-MPC由于不依赖任何电机参数,稳态电流品质得到有效改善。此外,若SynRM参数受工作点、环境温度等因素进一步影响,FCS-MPC对应稳态运行效果将进一步恶化,甚至FCS-MPC系统失稳后无法运行。

图7 FCS-MPC与DD-MPC稳态电流控制效果对比结果
其次,进行DD-MPC动态运行效果测试。图8给出了FCS-MPC和DD-MPC动态电流控制效果对比结果。0~1 s时电机处于额定转速下轻载运行,1 s时负载突增至重载,可以看出FCS-MPC和DD-MPC均具备快速转矩响应性能,两者响应时间均小于5 ms且无动态调制振荡现象。进一步对比可知,由于DD-MPC直接对SynRM暂态运行过程进行在线建模,其固有的内在自学习特征保证了大扰动情况下系统响应的快速性,具体表现为FCS-MPC和DD-MPC两者响应时间分别为2.5 ms和1.2 ms,响应性能提升了约1倍,且该特征不随时变参数变化。

图8 FCS-MPC与DD-MPC动态电流控制效果对比结果
最后,进行DD-MPC LUT高更新率实现方法有效性论证。图9给出了有无快速更新机制LUT电流变化量对比结果。图9(a)中由于DD-MPC未引入快速更新机制,有效电压矢量对应电流变化量δi1存在多处阶跃跳变,说明此时LUT中存储的电流变化量与前一控制周期实际发生值存在较大预测误差,零电压矢量对应电流变化量δi0则较为平滑。图9(b)中引入快速更新机制后,δi1和δi0均较为平滑,LUT存储变化量误差得到有效抑制。

图9 有无快速更新机制LUT电流变化量对比结果
进一步对SynRM全速域范围内DD-MPC更新率情况进行统计,对比结果如图10所示。可以看出,随着SynRM转速增加,LUT时间整体呈缩减趋势,同时在全速域范围内引入快速更新机制后LUT更新时间均有所提升,从而论证了所提LUT高更新率实现方法的有效性。

图10 快速更新机制投入前后统计对比结果
5 结 语
本文针对复杂环境下高效能SynRM参数失配引起的控制系统性能弱化问题,研究了一种数据驱动型模型预测控制方法,并基于25 kW测试样机对所提方法进行论证与分析,具体结论如下:
(1) DD-MPC采用“数据驱动模型”代替传统FCS-MPC中的“参数模型”,整个调速过程不依赖任何SynRM参数,表现出较强的鲁棒性和稳定性。
(2) 快速更新机制的引入,可有效提升LUT在线更新频率,提升了DD-MPC在电机调速系统全速域范围的适用性。
(3) 所提DD-MPC方法仅依赖被控对象的输入电压矢量和电流变化量关联关系,可推广应用至同类型电力电子系统中。
