基于改进WOA优化BP神经网络的车用PMSM参数辨识*
2022-08-31李镇伍申江卫李万超沈世全
陈 峥,李镇伍,申江卫,李万超,沈世全
(昆明理工大学 交通工程学院,云南 昆明 650500)
0 引 言
永磁同步电机(PMSM)凭借功率密度高、响应速度快、运行效率高等优点,被广泛应用于新能源汽车、机器人、高速列车等领域[1-2]。但PMSM属于非线性、强耦合系统,数学模型比较复杂,大多数控制策略都较依赖电机参数,每一台PMSM的参数都会由于制造差异而存在一定误差,且PMSM参数还会随运行不断发生变化[3],使用不准确的电机参数会引起电机控制的鲁棒性变差,甚至造成电机损坏[4]。因此,参数辨识也成为了PMSM领域的关键问题。相关学者针对PMSM参数辨识问题进行了大量的研究工作。传统的参数辨识方法有:模型参考自适应法(MRAS)[5]、递归最小二乘法(RLS)[6]、扩展卡尔曼滤波法(EKF)[7]以及群智能优化算法[8-9]等。然而这些方法都存在各自的不足之处:MRAS需要人工调节自适应律,且难以在欠秩的情况下实现多参数辨识[10-11];RLS法难以用于多参数辨识,且对噪声比较敏感[12];EKF则需要进行复杂的矩阵运算和公式推导,此外其本身还存在一定的线性误差[13];而群智能优化算法,例如粒子群算法(PSO)、遗传算法(GA)、人工鱼群算法(AFSA)等,拥有很强的全局搜索能力,但容易陷入局部最优[14]。
随着系统辨识技术的不断发展,各种不同类型的人工神经网络被用于PMSM参数辨识[15-16],其中BP神经网络凭借其较强的非线性映射能力和柔性的网络结构,得到了广泛应用。虽然BP神经网络拥有良好的局部搜索能力,但全局搜索能力较弱,收敛速度慢且收敛精度不够高[17],并且如果输入存在干扰,往往无法找到全局最优点。
鲸鱼优化算法(WOA)作为一种较新的群智能优化算法,拥有很强的全局搜索能力,并且具有结构简单、需调整参数少等优点。近年来WOA及其改进也在逐步用于PMSM领域:文献[18]使用WOA对直流电机的参数进行辨识,并与其他算法进行对比,证明了WOA的优越性;文献[19]使用WOA对PMSM系统控制进行优化,并取得良好的控制效果。还有学者对WOA和其他群智能优化算法进行了改进,进一步增强其性能:文献[20]介绍了一种引入Tent混沌映射的改进WOA,并将其用于PMSM的参数辨识,证明了改进WOA的优越性;文献[21]采用混沌人工鱼群算法优化BP神经网络对PMSM进行参数辨识,结果表明加入了混沌映射的辨识算法辨识效果更好。
本文结合WOA与BP神经网络各自的优点,并在WOA中加入Tent混沌映射以及精英学习机制,进一步增强WOA的全局搜索能力以及跳出局部最优的能力,建立了一种基于改进BP神经网络的PMSM参数辨识方法,实现了对PMSM定子电阻、d轴电感、q轴电感和磁链的精确辨识。
1 PMSM模型搭建
1.1 PMSM数学模型
PMSM目前较常用的控制策略为矢量控制[22]。忽略磁饱和效应、涡流损耗和磁滞损耗,在同步旋转坐标系下的PMSM数学模型表示为
(1)
(2)
(3)
式中:ud、uq分别为d、q轴电压分量;id、iq分别为d、q轴电流分量;Ld、Lq分别为d、q轴电感;ψd、ψq分别为d、q轴磁链分量;ψf为电机永磁体磁链;R为电机定子电阻;ωe为电机电角速度;J为电机转动惯量;TL和Te分别为电机负载转矩和电磁转矩;B为电机阻尼系数;ωm为电机机械角速度,并且ωm与ωe的关系为
ωe=pωm
(4)
式中:p为电机极对数。
将式(2)代入式(1),则电压方程可表示为
(5)
根据式(5)得出PMSM在d、q轴的电压等效电路图,如图1所示。
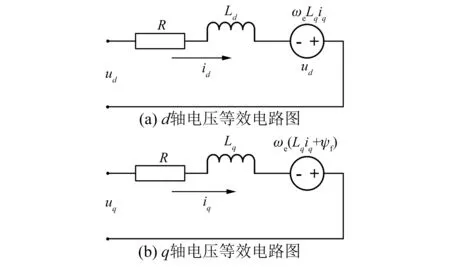
图1 PMSM等效电路图
根据电压等效电路图可以得出电机电磁转矩方程:

(6)
1.2 PMSM参数辨识模型搭建
根据电机矢量控制原理、等效电路图搭建参数辨识矢量控制模型,如图2所示。图2中Nm表示电机转速。并根据式(3)~式(6)搭建PMSM可变参数模型,仿真所用电机初始参数如表1所示,仿真时长为4 s,采样周期为10-4s。设置PMSM参数R、Ld、Lq和ψf的值随时间不断变化,用于验证算法在电机参数发生变化时的可靠性:R由0.180 Ω增加至0.209 Ω;Ld由0.089 3 H增加至0.103 0 H;Lq由0.205 H增加至0.236 H;ψf由0.016 0 Wb减小至0.013 6 Wb。电机参数具体变化情况如图3所示。
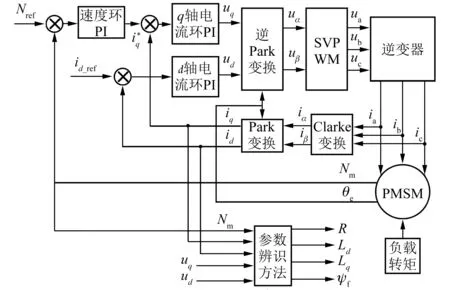
图2 PMSM参数辨识模型框图
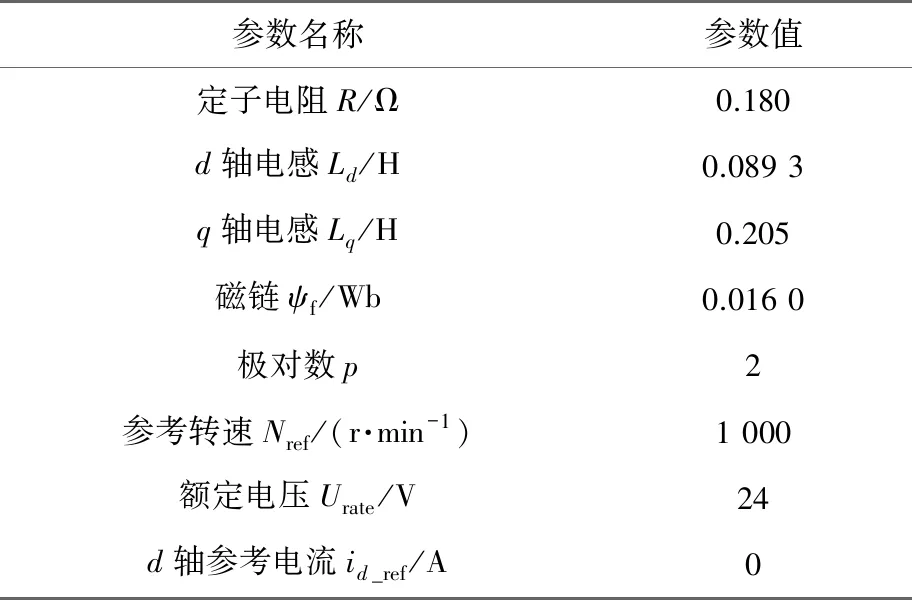
表1 PMSM仿真初始参数
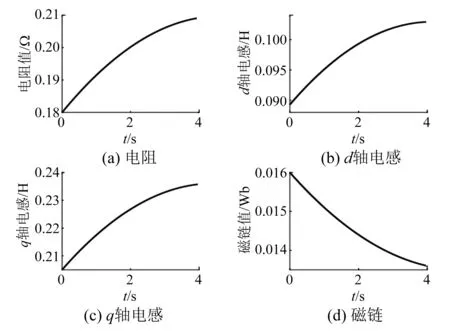
图3 电阻、d轴电感、q轴电感和磁链变化情况
设置负载转矩TL在电机运行至2 s时,由1 N·m阶跃至3 N·m,用于验证算法在电机负载突变时的有效性。此外,在电机电流电压输出端使用低通滤波器对输出的d、q轴电压和电流进行噪声处理。电机主要运行参数变化情况如图4所示。
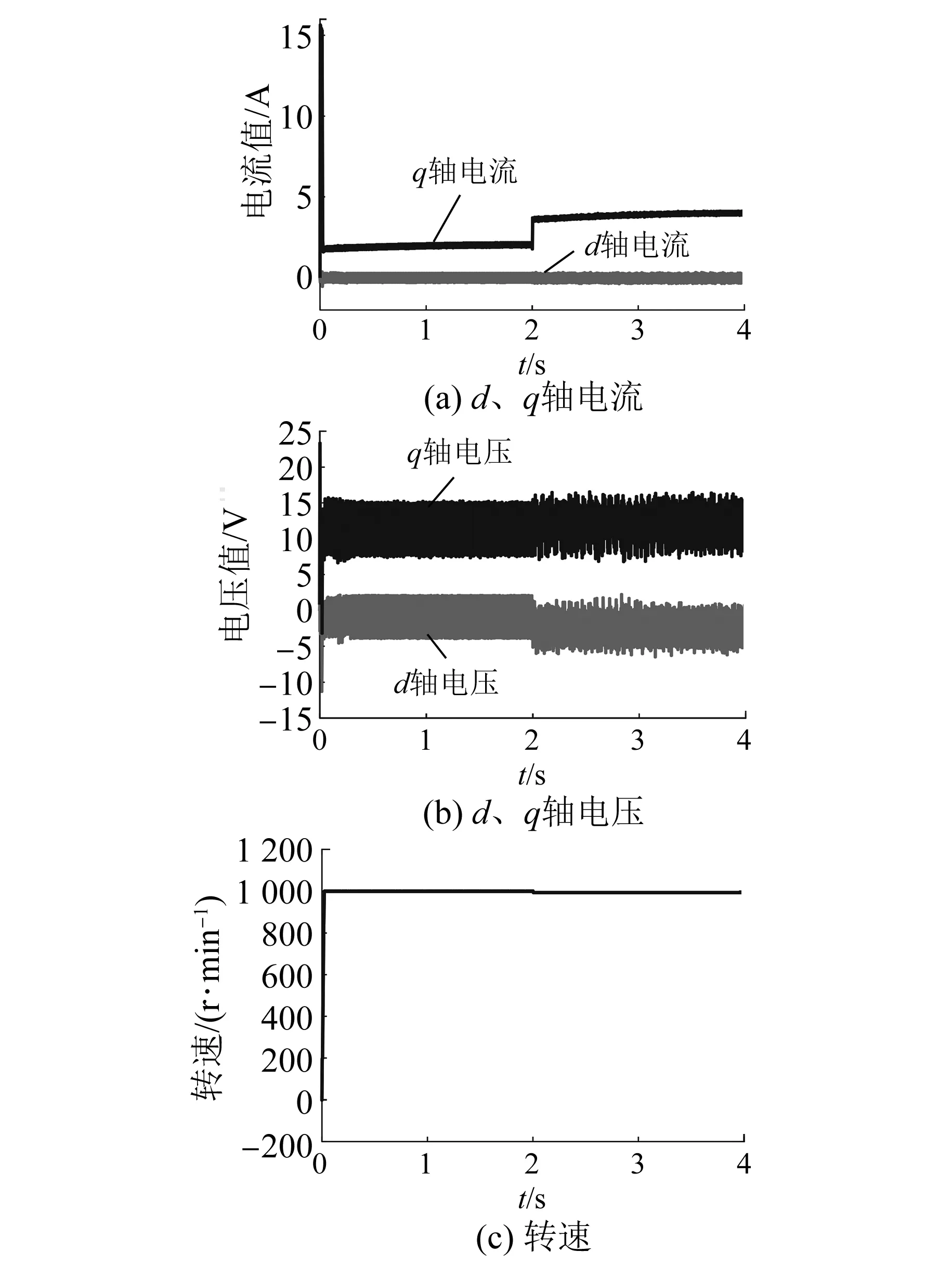
图4 主要运行参数变化情况
2 基于改进WOA优化BP神经网络的PMSM参数辨识
2.1 辨识模型数据提取方法
对电机运行时的d轴电流id、q轴电流iq、d轴电压ud、q轴电压uq、电机转速Nm和对应的定子电阻R、d轴电感Ld、q轴电感Lq以及磁链ψf进行采集,用于PMSM参数辨识。
PMSM的Simulink仿真中,设置单次采样时间为10-4s,运行时间为4 s,共获取40 000个样本,记作Data 1。为兼顾辨识精度和辨识速度,对Data 1进行样本提取得到用于PMSM参数辨识的数据集Data 2,如图5所示,将40 000个样本每20个作为一组,并在每一组中随机提取一个数据。

图5 数据提取方法
2.2 BP神经网络参数辨识模型
BP神经网络是一种应用广泛的人工神经网络,其输入层、隐含层、输出层的多层结构能够映射任何线性和非线性的系统。本文对其进行优化并用于PMSM参数辨识。Data 2中有2 000组数据,将其中1 600组用作训练集,400组用作测试集,并将id、iq、ud、uq、Nm作为BP神经网络的输入层,将R、Lq、Lq以及ψf作为BP神经网络的输出层。设置输入层神经元个数为5,输出层神经元个数为4,隐含层层数选择1层。此外,隐含层神经元的数量决定了神经网络的训练精度和速度[21],本文根据以下经验公式最终确定隐含层神经元个数:
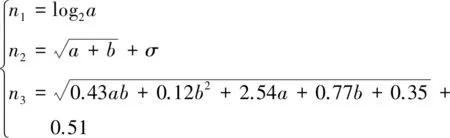
(7)
式中:n1、n2、n3分别为3个公式各自确定的隐含层神经元个数,三者确定隐含层神经元个数的取值范围;a为输入层神经元个数;b为输出层神经元个数;σ为1~10之间的整数。隐含层神经元个数取值如表2所示。

表2 BP神经网络隐含层神经元个数取值范围
表2中n表示隐含层神经元个数的取值范围。将n对应的不同取值分别代入神经网络训练,对4个输出的训练均方根误差进行加权处理,获取训练集的加权均方根误差(WRMSE),并将WRMSE最小时n对应的取值作为最终的隐含层神经元个数。
WRMSE的计算式为

(8)
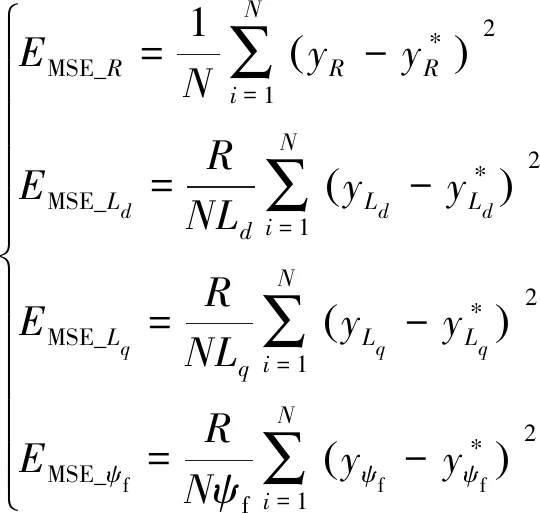
(9)
如表3所示,隐含层神经元个数为8时, WRMSE的值最小,因此将隐含层神经元个数确定为8。确定BP神经网络结构后,对数据样本进行归一化处理,使用Sigmoid函数作为激活函数,BP神经网络拓扑结构如图6所示。
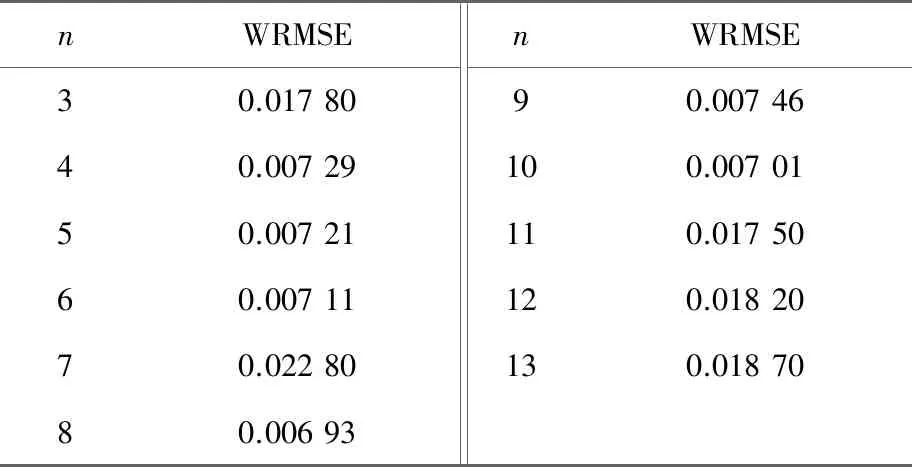
表3 不同隐藏层神经元个数对应的WRMSE
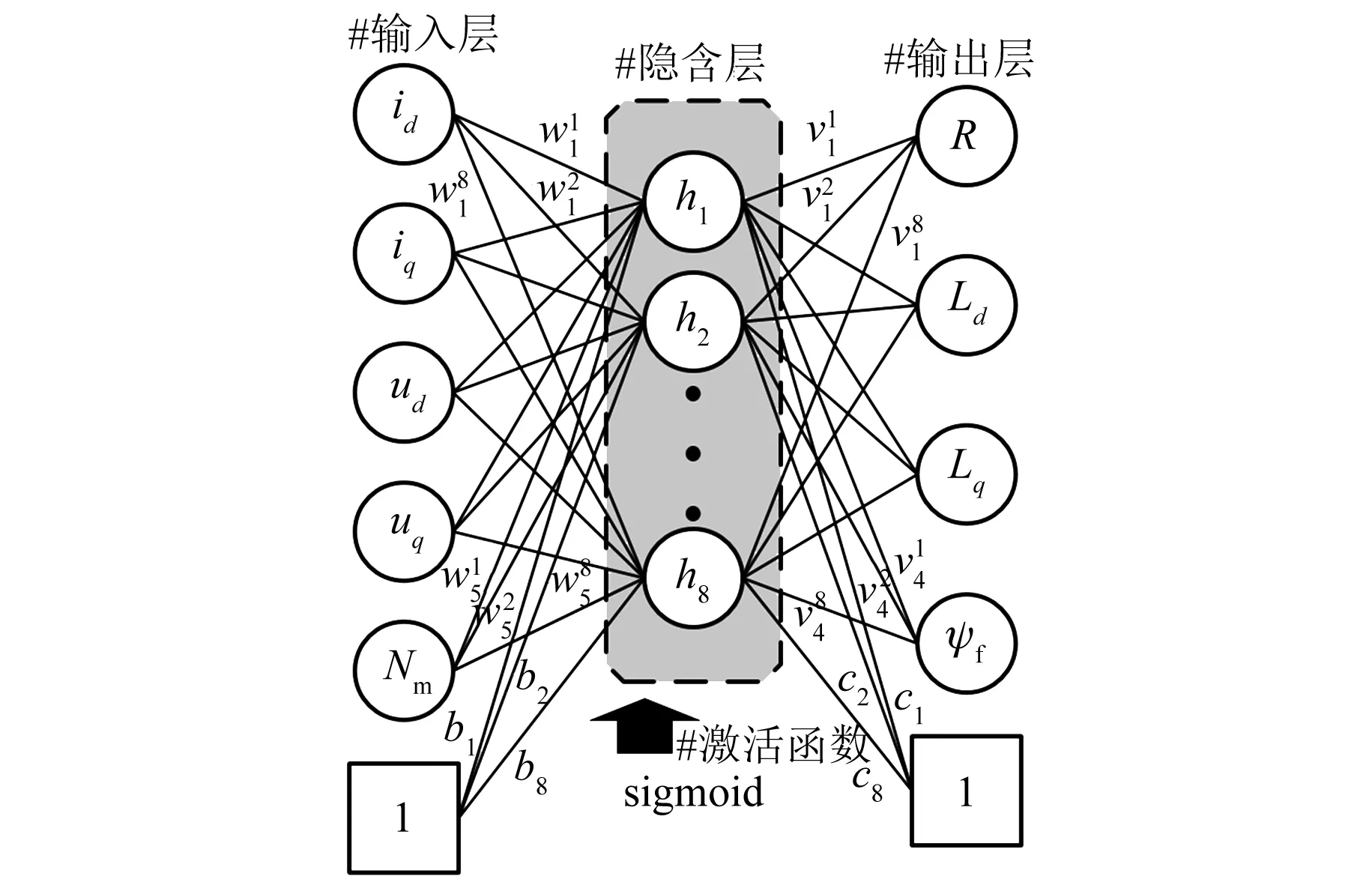
图6 BP神经网络结构图
图6中w和v分别表示输入层与隐含层神经元之间的连接权值以及输出层与隐含层神经元之间的连接权值;b和c分别表示输入层与隐含层神经元之间的阈值以及输出层与隐含层神经元之间的阈值。
2.3 改进的鲸鱼优化算法
为解决传统BP神经网络全局搜索能力弱、抗干扰能力差的问题,本文融合WOA对BP神经网络进行优化,并对传统WOA进行改进。
WOA是Mirjalili等[23]提出的新型群体智能优化算法,具有全局搜索能力强、结构简单等优点,包括包围猎物、气泡网攻击以及搜索猎物三个阶段。
2.3.1 包围猎物
鲸鱼种群在寻优过程中,选取当前最优个体位置,使种群的其他个体向其靠近,表示为
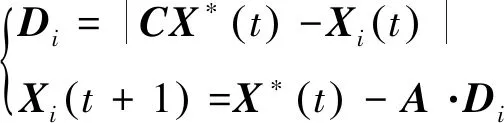
(10)
X*(t)=argmin[f(X1),f(X2),···,f(Xn)]
(11)
式中:Xi为个体i的位置向量;t为当前迭代次数;X*为最优个体位置向量;f(Xi)表示个体i所在位置的适应度值;A和C为系数向量,表示为
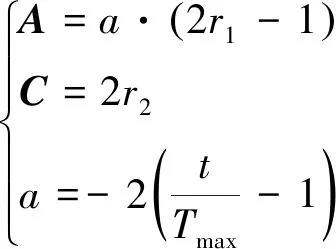
(12)
式中:参数a为随迭代次数线性减小的参数;r1和r2均为[0,1]区间上的随机数;Tmax为最大迭代次数。
2.3.2 气泡网攻击
这个阶段由收缩包围和螺旋位置更新构成。式(12)中的参数a随迭代次数线性减小,由此即可实现对目标的收缩包围。完成收缩包围后,对目标进行螺旋式靠近,表示为

(13)
式中:Db为当前个体与最优个体之间的距离;b为定义螺旋线形状的常数;l为(-1,1)区间上的随机数。
鲸鱼在不断收缩包围的同时,还要沿螺旋线运动。因此,设置概率ζ使当前个体进行螺旋位置更新,ζ为[0,1]区间上的随机数,则1-ζ使当前个体进行收缩包围,表示为

(14)
2.3.3 搜索猎物
为保证全局搜索性能,种群个体在采用气泡网攻击之外,还需要随机寻找猎物,因此设置当系数向量的模|A|>1时,个体朝着一个随机位置靠近,表示为
(15)
式中:Xrand为种群中随机个体的位置向量。
2.3.4 改进方法
为了进一步增强传统WOA的全局搜索能力以及跳出局部最优的能力,本文利用Tent混沌映射和精英学习机制对传统WOA进行了改进。
传统WOA种群初始化是完全随机的,往往会出现因种群初始化不均匀,搜索无法遍历全局而陷入局部最优的问题。Tent混沌映射具有较强的均匀性和随机性,因此在WOA种群初始化步骤加入Tent混沌算子使初始种群更加均匀,有利于扩大搜索范围。
加入Tent混沌映射的优化表示为
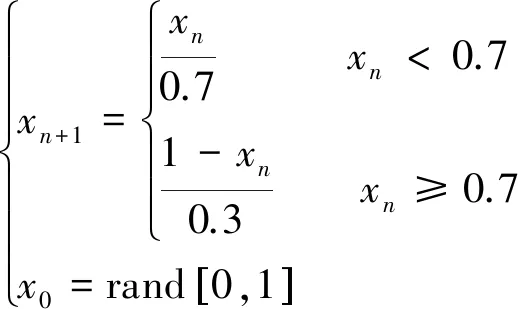
(16)
设置WOA初始种群数为50,搜索空间中传统WOA初始种群与Tent混沌映射初始种群对比如图7所示。
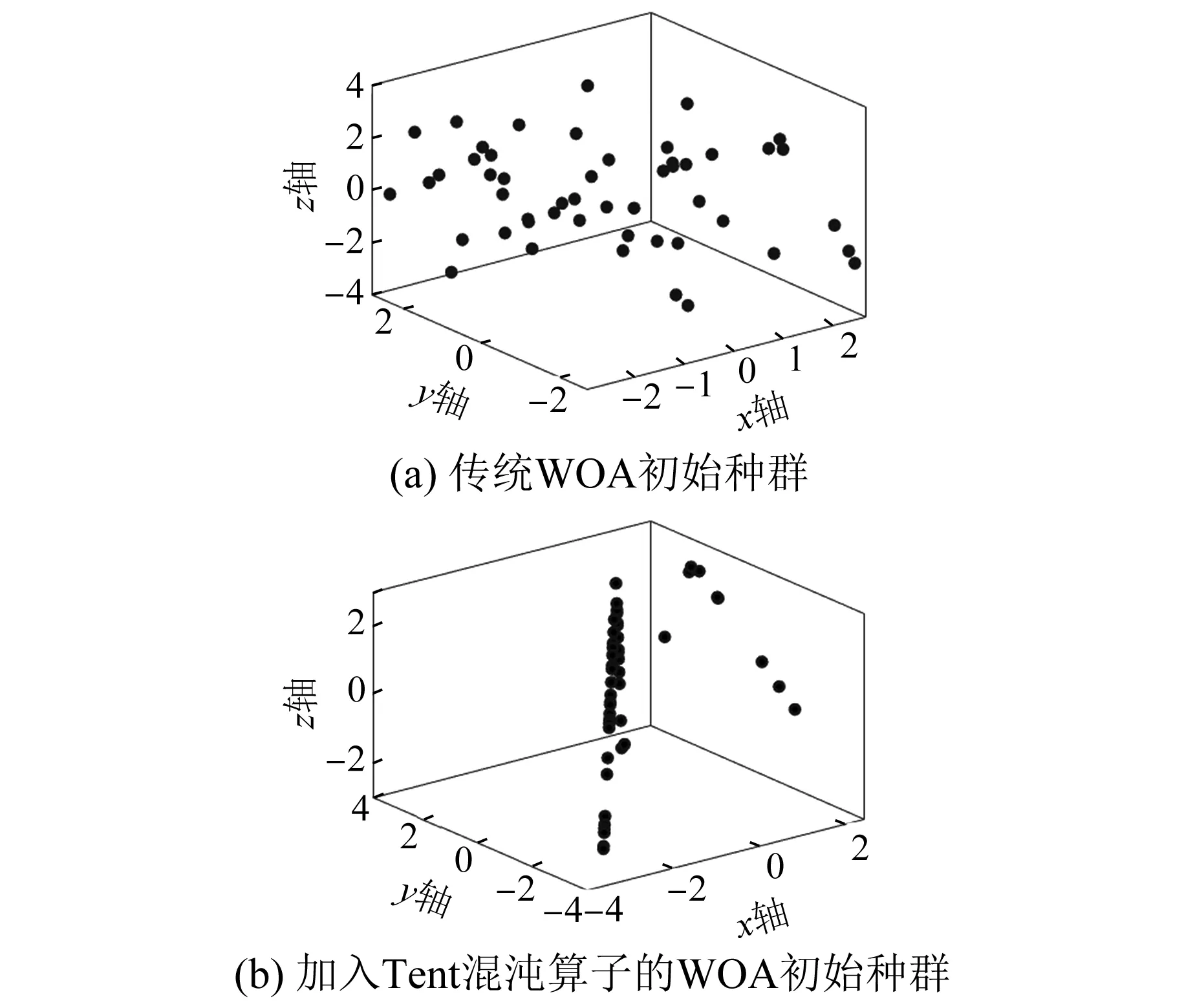
图7 初始种群位置分布
迭代过程中,WOA存在种群多样性单一、不易收敛到全局最优的问题。本文引入精英学习机制,增强种群多样性以及全局搜索能力。
根据下式产生精英个体XC(t),并使其向当前最优个体X*(t)学习:
XC(t)=j·k·[Xi(t)-X*(t)]
(17)
式中:j为常数,取0.7;k为[0,1]区间上的随机数。
再与种群内现存的个体Xi(t)进行比较,若XC(t)位置的适应度值小于Xi(t)位置的适应度值,则由XC(t)将Xi(t)替代,表示为

(18)
本文将加入Tent混沌映射以及精英学习机制的改进WOA命名为TCWOA。
2.4 TCWOA优化BP神经网络
在BP神经网络的结构确定之后,其收敛能力较大程度上取决于初始连接权值和阈值。对于传统BP神经网络来说,初始权值和阈值都是随机的,很难达到最优。本文采用TCWOA对BP神经网络的初始连接权值和阈值进行优化,以提升BP神经网络的收敛速度和精度,并将该方法命名为TCWOA-BP。同理,将传统WOA优化BP神经网络的方法命名为WOA-BP。
TCWOA-BP的算法流程如图8所示。
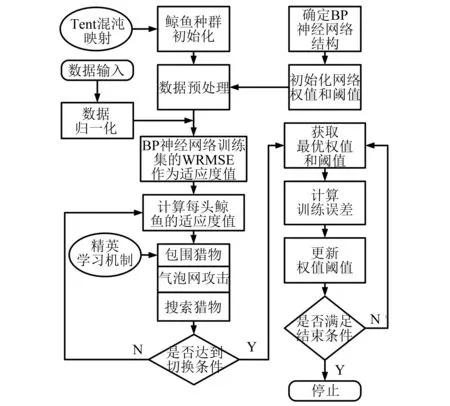
图8 TCWOA-BP算法流程图
TCWOA及WOA算法的初始条件设置为:初始种群数量为50,最大迭代次数为30,搜索精度为10-4。设置BP神经网络的权值和阈值为在(-1,1)区间上的不为0随机数,并将训练集的WRMSE作为适应度值。当TCWOA及WOA达到最大迭代次数时,将搜索得到的最小WRMSE对应的权值和阈值作为初始权值和阈值用于BP神经网络训练。
2.5 TCWOA寻优性能验证
将数据集Data 2用于TCWOA-BP、WOA-BP以及BP神经网络进行训练,对TCWOA与WOA的种群收敛效果以及寻优得到的最佳适应度值进行对比。TCWOA与WOA种群最终位置分布如图9所示,最佳适应度值变化曲线对比如图10所示。
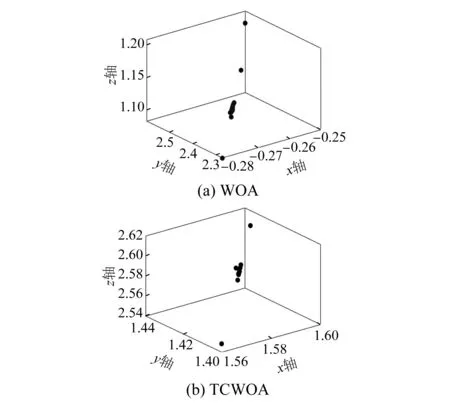
图9 种群最终位置分布
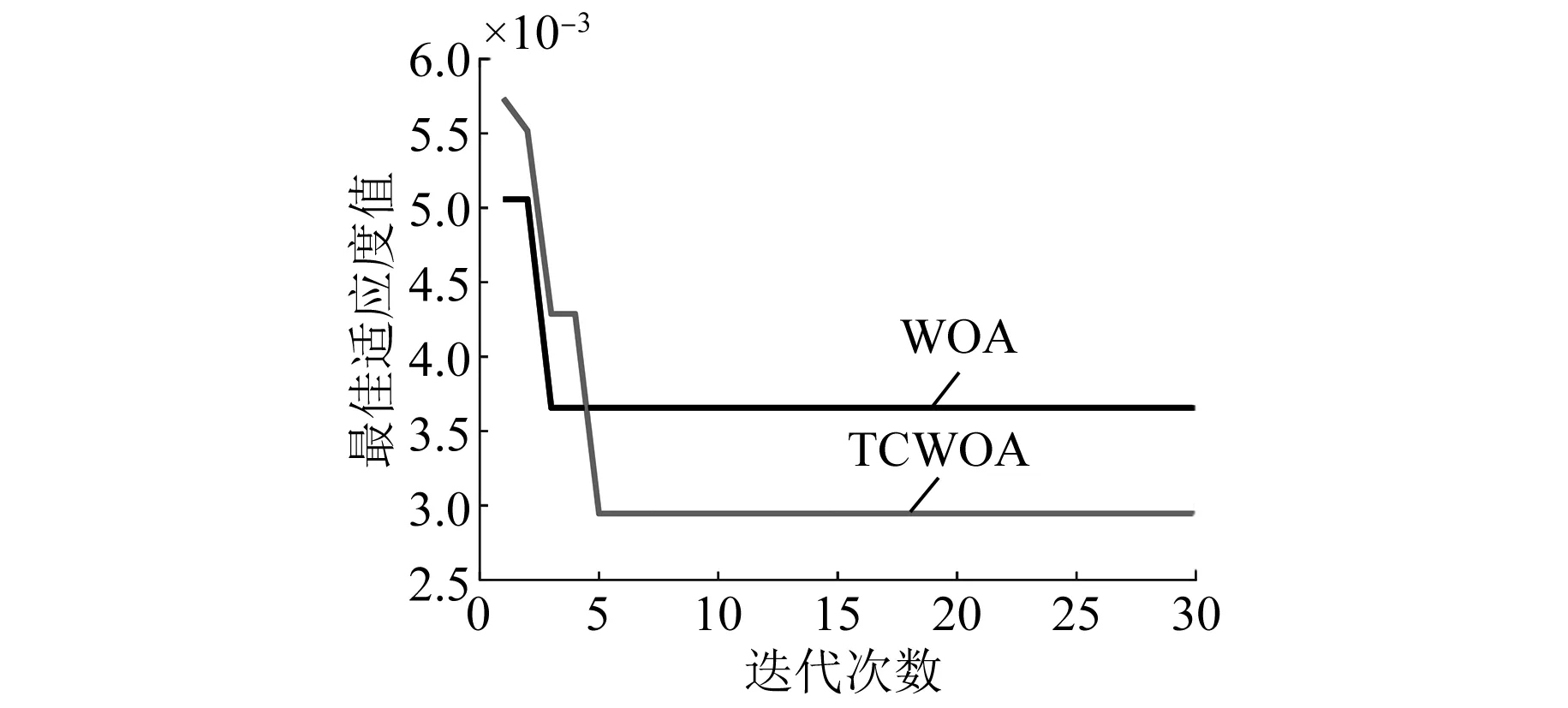
图10 TCWOA与WOA种群进化曲线对比
由图9可以看出,TCWOA在搜索结束时,种群个体更加集中,说明其收敛性更好。由图10可以看出,TCWOA在初期最佳适应度值更大,证明TCWOA的搜索范围更广;此外传统WOA在第三代时就无法继续寻优,而TCWOA则能够进一步寻优且寻优结果更好,证明其搜索和寻优能力更强。
3 基于TCWOA-BP的PMSM参数辨识结果验证
下面使用BP神经网络、WOA-BP以及TCWOA-BP进行对比验证。各算法中BP神经网络部分的初始设置为:5个输入神经元、4个输出神经元、1层隐含层以及8个隐含层神经元,初始权值和阈值为(-1,1)区间上的不为0随机数;WOA-BP和TCWOA-BP中的鲸鱼优化算法初始条件设置均相同且如2.4节所述。
3.1 全局运行数据的PMSM参数辨识验证
使用Data 2中的数据进行BP神经网络参数辨识的验证,TCWOA-BP、WOA-BP以及BP神经网络对PMSM各参数的全局辨识结果对比如图11所示。表4为三种参数辨识方法使用全局运行数据的参数辨识平均绝对误差(MAD)以及相对误差er。
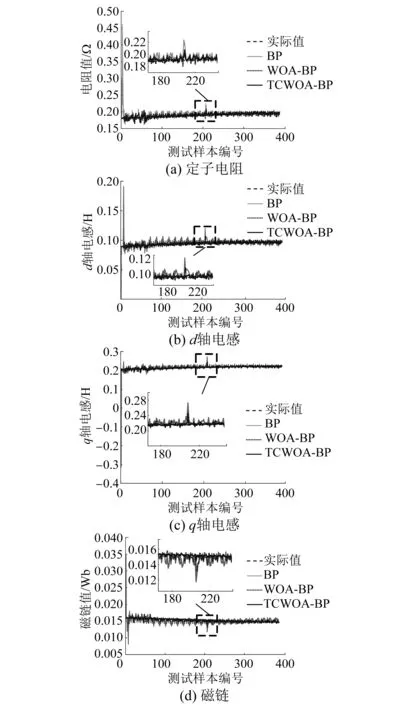
图11 全局运行数据下电机参数辨识结果
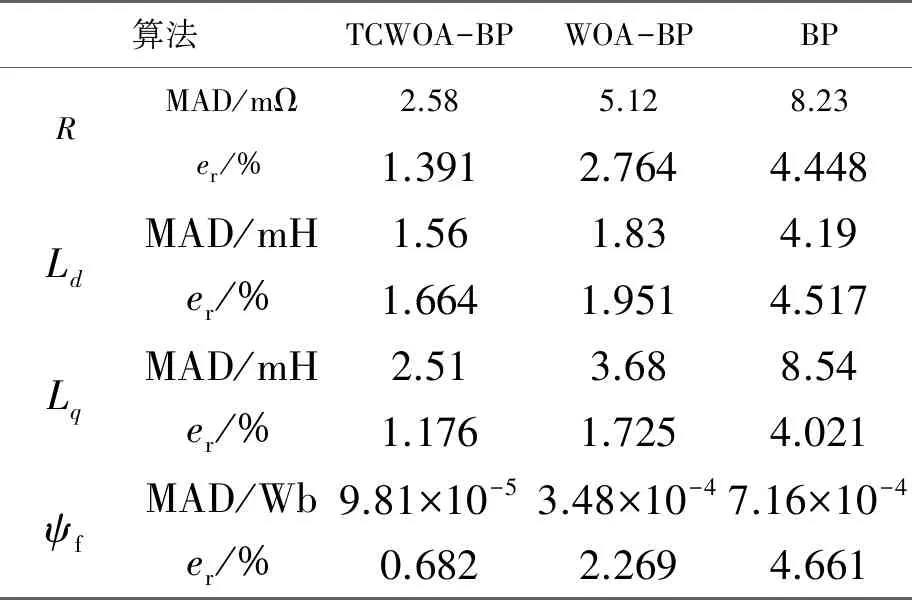
表4 不同辨识方法的全局MAD及相对误差
由图11可以看出,与WOA-BP以及BP神经网络相比,使用全局运行数据的TCWOA-BP在辨识初期以及负载突变时,产生的波动最小,并能够较快地重新稳定。由表4可知,在对电阻、d轴电感、q轴电感和磁链的辨识中,TCWOA-BP的辨识精度较WOA-BP分别提升了1.373%、0.287%、0.549%、1.587%,相较于BP神经网络则分别提升了3.057%、2.853%、2.845%、3.979%,尤其对q轴电感和磁链的辨识精度提升较明显且辨识效果最好,辨识误差分别仅为1.176%和0.682%,电阻和d轴电感的辨识精度也高于其他两种方法。以上结果证明了TCWOA-BP拥有较高的辨识精度以及良好的抗干扰能力。
3.2 稳态运行数据的PMSM参数辨识验证
剔除Data 2中初始的50组数据以及转矩突变前后各50组数据,得到用于稳态参数辨识的数据集Data 3,共1 850组数据,其中1 480组作为训练集,370组作为测试集。TCWOA-BP、WOA-BP以及BP神经网络对PMSM各参数的稳态运行数据辨识结果对比如图12所示。表5为三种参数辨识方法使用稳态运行数据参数辨识的MAD和相对误差。
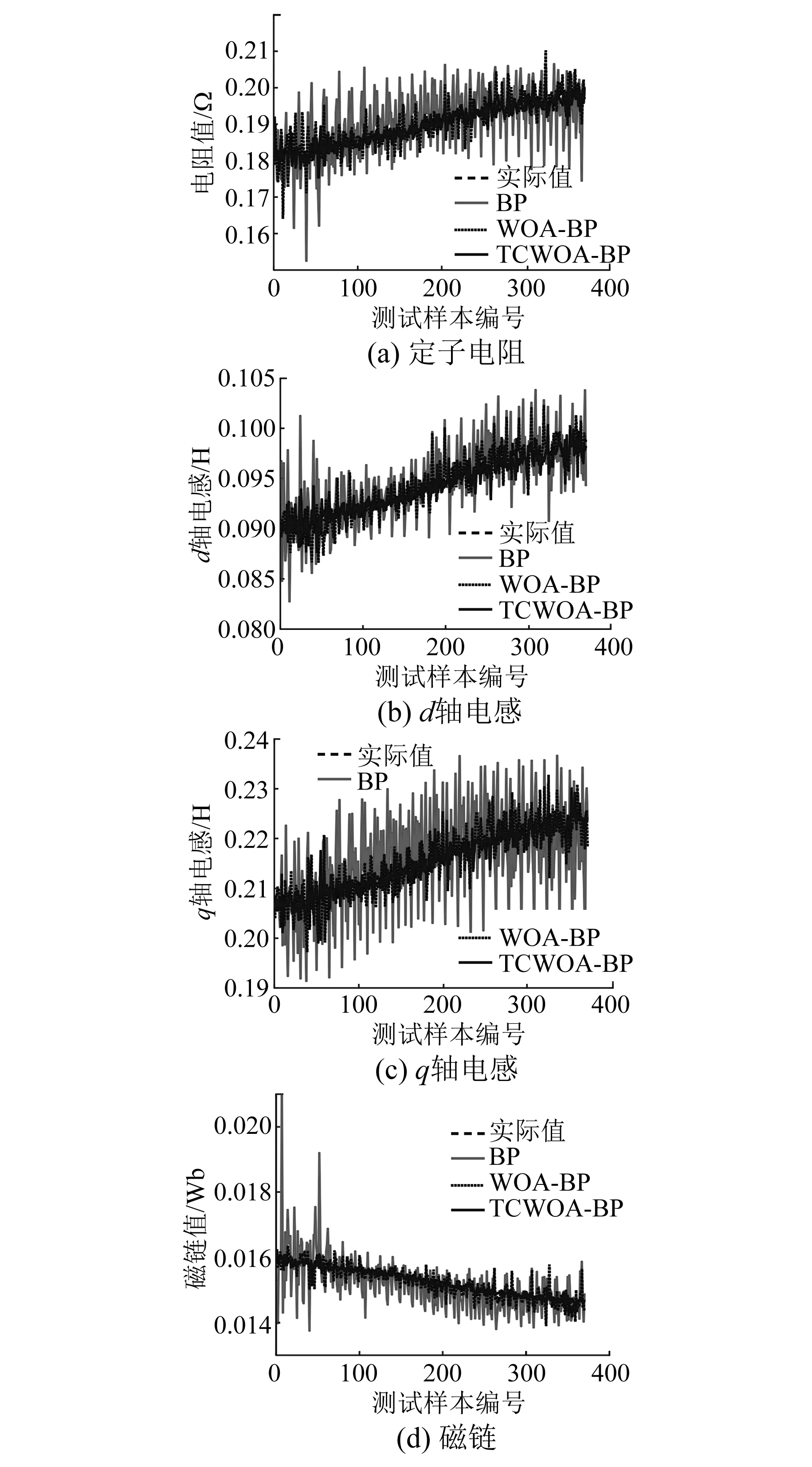
图12 稳态运行数据下电机参数辨识结果
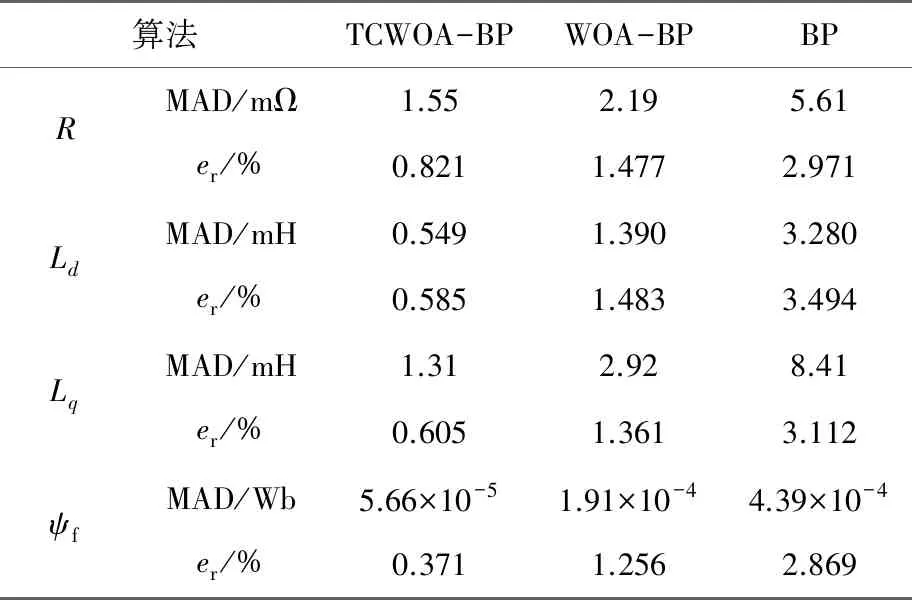
表5 不同辨识方法的稳态MAD及相对误差率
由图12可以看出,与WOA-BP以及BP神经网络相比,使用稳态运行数据的TCWOA-BP在辨识时的稳态误差和波动最小。由表5可知,在对电阻、d轴电感、q轴电感和磁链的辨识中,TCWOA-BP的辨识精度较WOA-BP分别提升了0.656%、0.898%、0.756%、0.885%,相较于BP神经网络则分别提升了2.150%、1.909%、2.507%、2.498%。在剔除产生波动的数据后,WOA-BP与BP神经网络的辨识精度有所提高,但TCWOA-BP相较于以上两种方法其辨识精度仍然更高。同样地,TCWOA-BP对d轴电感和磁链的辨识精度提升较明显且辨识精度最高,其辨识误差仅为0.585%和0.371%,电阻和q轴电感辨识精度也高于其他两种方法。以上结果证明了TCWOA-BP在电机稳态运行时具有较高的辨识精度。
3.3 试验平台验证
为了验证本文所述参数辨识算法在真实PMSM系统中的有效性,使用仿真所用参数的PMSM进行试验平台验证。使用电机开发板实现矢量控制及SVPWM算法;使用AMR仿真器连接计算机,通过虚拟示波器观察PMSM运行时的d、q轴电流、电压及转速,并进行采样。电机试验平台如图13所示。
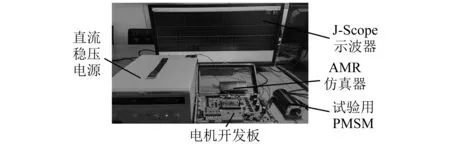
图13 电机试验平台
PMSM在给定转速800 r/min的情况下运行,并采集运行时的d、q轴电流、电压及转速数据各40 000个。使用图5所述的数据处理方法进行数据处理,得到2 000个样本用于对TCWOA-BP参数辨识方法进行验证,其中1 600个数据用于训练,400个用于测试。测试结果如图14所示。
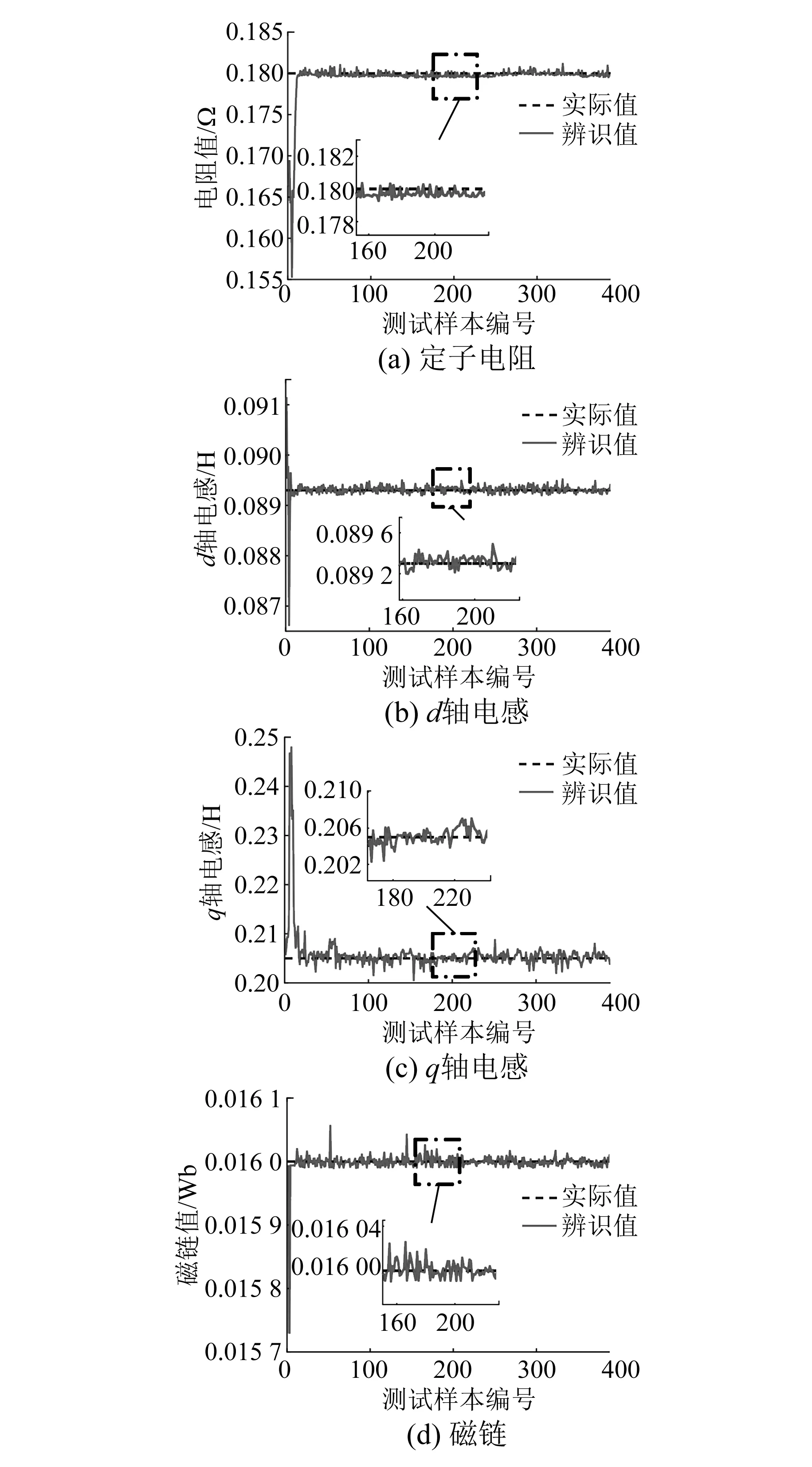
图14 试验数据下电机参数辨识结果
由图14可以看出,基于TCWOA-BP的参数辨识方法能够迅速辨识出4个电机参数的值:电阻辨识误差在±0.002 Ω以内,d轴电感辨识误差在±0.000 3 H以内,q轴电感辨识误差在±0.005 H以内,磁链辨识误差在±0.000 6 Wb以内,其中电阻和d轴电感辨识的最大相对误差仅为1.11%和0.34%,q轴电感和磁链辨识的最大相对误差分别为2.43%和3.75%,均在PMSM正常使用的参数误差范围之内,证明了该方法具有良好的参数辨识效果。同时对于初期的波动,在经历较少迭代次数之后就能够很快矫正,实现准确的辨识,证明其具有很好的抗干扰能力。
4 结 语
针对PMSM非线性、强耦合的特性以及目前参数辨识方法存在的问题,本文建立了一种基于改进WOA优化BP神经网络的PMSM参数辨识方法,融合了WOA及BP神经网络的优点,并对WOA进行改进,提升了其性能。在使用全局和稳态运行数据辨识时都具有较高的辨识精度,相较于WOA-BP与BP神经网络,4个参数的辨识误差都更小。在使用全局运行参数辨识时,TCWOA-BP在负载突变及运行初期都能保持较高的辨识精度以及鲁棒性,辨识结果波动也小于WOA-BP与BP神经网络。本文所提出的基于改进WOA优化BP神经网络的PMSM参数辨识方法,仅需获取电机运行时的电流、电压及转速即可实现PMSM定子电阻、d轴电感、q轴电感以及磁链的准确辨识,具有应用简单、辨识精度高、鲁棒性强的优点,可为进一步提高PMSM参数辨识精度提供参考。
